Teorik mekaniğe göre dinamikte temel formüller. Katı bir cismin eylemsizlik kuvvetleri. Genel dinamik teoremleri
Konuyla ilgili ders notları
TEORİK MEKANİK
Uzmanlık öğrencileri için:
260501.65 Yemek servis teknolojisi,
Tam zamanlı eğitim şekli
Ders notları aşağıdakilere dayanmaktadır:
1. Butorin L.V., Busygina E.B. Teorik mekanik. Eğitici ve pratik rehber. - M., MGU TU, 2004
2. Targ S.M. Kısa kurs teorik mekanik. - M.: Yüksek Lisans, 2001 - İle birlikte.
3. Yablonsky A.A., Nikiforova V.N. Teorik mekanik dersi. M. "Lan", 2000
giriiş
Modern endüstriyel üretim gıda dahil, son derece mekanize endüstrilerdir. Giderek daha karmaşık görevlerin çözümü, teknolojik ekipmana atanır ve bu da ekipmanın karmaşıklığına yol açar. Modern bir mühendisin oluşumu, temel disiplinlerin bilgisi olmadan düşünülemez. Bu disiplinlerden biri, teorik mekanik .
Teorik mekanik, mekanik hareketin temel yasalarını ve maddi cisimlerin mekanik etkileşimini belirleyen bir mekaniğin dalıdır. mekanik hareket maddi cisimlerin uzaydaki göreli konumunun zaman içindeki değişimine denir, mekanik etkileşim- mekanik hareketin değiştiği veya vücut parçalarının göreceli pozisyonunun değiştiği böyle bir etkileşim.
Teorik mekanik genellikle ikiye ayrılır: statik, kinematik ve dinamik .
Statikte koşullar incelenir denge maddi cisimler ve kuvvetler sisteminin özdeş dönüşüm yöntemleri. Denge Bir cismin kuvvetlerin etkisi altında sabit kaldığı veya düz bir çizgide düzgün hareket ettiği bir durum.
Kinematikte, cisimlerin hareketinin genel geometrik özellikleri dikkate alınır. Vücuda etki eden kuvvetler dikkate alınmaz. Hareket kanunu verilir. Vücudun hareket yasası cismin uzaydaki konumunun zamana bağımlılığıdır.
Dinamikte, kuvvetlerin etkisi altındaki cisimlerin genel hareket yasaları incelenir.
1. C tatika sağlam vücut
1.1 Statik ile ilgili temel kavramlar
Kesinlikle rijit gövde (rijit gövde, gövde)- maddi bir gövde, değişmeyen herhangi bir nokta arasındaki mesafe. Sonuç olarak vücudun boyutu ve şekli değişmez.
Malzeme noktası boyutları, problemin koşullarına göre ihmal edilebilecek bir cisimdir.
gevşek vücut- hareketine herhangi bir kısıtlama getirilmeyen bir vücut.
Serbest olmayan (bağlı) gövde– hareketi kısıtlanmış bir vücut.
Bağlantılar- incelenen nesnenin hareketini engelleyen cisimler (bir cisim veya cisimler sistemi).
mekanik sistem- bir dizi birbirine bağlı gövde veya malzeme noktası.
Rijit bir cisim, konumları ve noktalar arasındaki mesafeleri değişmeyen mekanik bir sistem olarak düşünülebilir.
Kuvvet- bir malzeme gövdesinin diğeri üzerindeki mekanik hareketini karakterize eden bir vektör miktarı.
Vektör olarak kuvvet, uygulama noktası, etki yönü ve mutlak değer ile karakterize edilir (Şekil 1.1). Kuvvet modülünün ölçü birimi Newton'dur.
 |
Şekil 1.1. Şekil 1.2.
kuvvet hattı kuvvet vektörünün yönlendirildiği düz çizgidir.
Konsantre Güç bir noktada uygulanan kuvvettir.
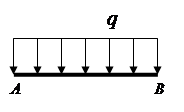
Dağıtılmış kuvvetler (dağıtılmış yük)- vücudun hacminin, yüzeyinin veya uzunluğunun tüm noktalarına etki eden kuvvetler (Şekil 1.2).
Dağıtılmış yük, birim hacme (yüzey, uzunluk) etki eden kuvvet tarafından belirlenir.Yayılı yükün boyutu N/m3'tür (N/m2,N/m).
Dış güç dikkate alınan mekanik sisteme ait olmayan bir cisimden hareket eden bir kuvvettir.
manevi güç- etki eden kuvvet maddi nokta mekanik sistem incelenen sisteme ait başka bir maddi noktanın yanından.
Kuvvet sistemi- mekanik bir sisteme etki eden bir dizi kuvvet.
Düz kuvvetler sistemi- hareket çizgileri aynı düzlemde olan bir kuvvetler sistemi.
Mekansal kuvvetler sistemi- etki çizgileri aynı düzlemde olmayan bir kuvvetler sistemi.
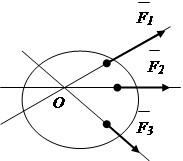
Yakınsak kuvvet sistemi- etki çizgileri bir noktada kesişen bir kuvvetler sistemi (Şekil 1.3).
Keyfi kuvvetler sistemi- etki çizgileri bir noktada kesişmeyen bir kuvvetler sistemi (Şekil 1.4)
 |
Şekil.1.3 Şekil.1.4
Eşdeğer kuvvet sistemleri- birbirinin yerine geçmesi vücudun mekanik durumunu değiştirmeyen bu tür kuvvet sistemleri. Kabul edilen notasyon:
Dengeli kuvvetler sistemi- serbest katı bir cisme uygulandığında mekanik durumunu değiştirmeyen (dengesini bozmayan) bir kuvvetler sistemi.
![]()
bileşke kuvvet- bir cisme etkisi, bir kuvvetler sisteminin hareketine eşdeğer olan bir kuvvet.
![]()
Güç anı- kuvvetin dönme kabiliyetini karakterize eden bir değer.
güç çifti- mutlak değerde eşit, zıt yönde yönlendirilmiş iki paralel kuvvetten oluşan bir sistem. Kabul edilen atama () Bir çift kuvvetin etkisi altında, vücut dönme hareketi yapacaktır.
Eksen Üzerindeki Kuvvet Projeksiyonu- kuvvet vektörünün başlangıcından ve sonundan bu eksene çizilen dikler arasına alınmış bir segment (Şekil 1.5).
Segmentin yönü eksenin pozitif yönü ile çakışıyorsa izdüşüm pozitiftir.
Uçakta Kuvvetin İzdüşümü- kuvvet vektörünün başlangıcından ve sonundan bu düzleme çizilen dikler arasına alınmış bir düzlemde bir vektör (Şekil 1.6).
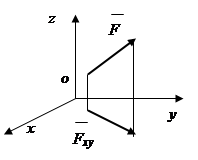
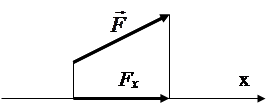
Fig.1.5 Fig.1.6
1.2. Statik aksiyomları
Statiğin teorik ilkeleri bir dizi aksiyoma dayanmaktadır. Bir aksiyom, gözlemlerin sonuçlarının genelleştirilmesinin bir sonucu olarak formüle edilen bir yasadır.
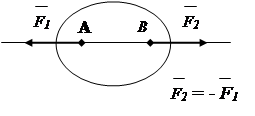
1. Denge aksiyomu.
Katı bir cisme etki eden iki kuvvet, ancak mutlak değerde eşitse ve zıt yönlerde bir düz çizgi boyunca hareket ederse dengelenir (Şekil 1.7).
Şekil.1.7 Şekil.1.8
2. Dengeli bir kuvvetler sisteminin eklenmesi (dışlanması) aksiyomu.
Bir kuvvetler sisteminin katı bir cisim üzerindeki etkisi, buna dengeli bir kuvvetler sistemi eklenirse veya ondan çıkarılırsa değişmeyecektir (Şekil 1.8).
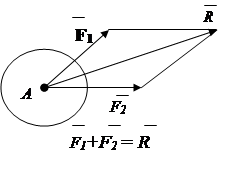
3. Kuvvetlerin paralelkenarı hakkında aksiyom.
Katı bir cismin bir noktasına uygulanan iki kuvvetten oluşan bir sistem, aynı noktada uygulanan bir bileşke kuvvete sahiptir. Ortaya çıkan vektör, bu kuvvetler üzerine kurulmuş paralelkenarın köşegenidir (Şekil 1.9).
Pirinç. 1.9 Şekil 1.10
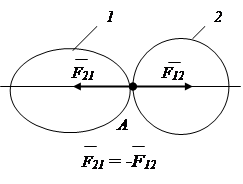
4. Karşı tepki aksiyomu.
Bir katı cisim diğerine etki ettiğinde, hareket eden kuvvete zıt, mutlak değerde eşit bir tepki kuvveti ortaya çıkar (Şekil 1.10).
Not. Eylemi verilen kuvvete denir aktif kuvvet tepki kuvveti denir reaksiyon .
5. Bağlantı aksiyomu.
Özgür olmayan herhangi bir beden, zihinsel olarak bağlardan kurtulursa, eylemlerini karşılık gelen tepkilerle değiştirirse, özgür olarak kabul edilebilir.
1.3 Tahviller ve tepkileri
İncelenen nesnenin hareketini engelleyen cisimlere kısıtlamalar denir. Bağın söz konusu cisme uyguladığı kuvvete ne ad verilir? bağ reaksiyonu. Olası eşleşme reaksiyonlarını belirlerken, reaksiyonun söz konusu cismin hareketini engelleyen bir kuvvet olduğu gerçeğinden hareket edilmelidir. Reaksiyon, bağlantının vücudun hareket etmesine izin vermediği yere ters yönde yönlendirilir.
Bazı ortak bağlantılara bakalım.
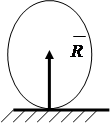
Yumuşak yüzey destek yüzeyinin normali boyunca hareketi kısıtlar. Reaksiyon yüzeye dik olarak yönlendirilir (Şekil 1.11).
Mafsallı hareketli destek vücudun hareketini normal boyunca referans düzlemine sınırlar. Reaksiyon, normal boyunca destek yüzeyine yönlendirilir (Şekil 1.12)
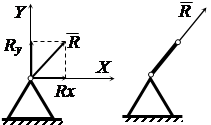
Mafsallı sabit destek dönme eksenine dik bir düzlemde herhangi bir harekete karşı koyar. Hesaplamalarda, reaksiyon Fr, kural olarak, X ve Y eksenleri boyunca iki bileşen olarak sunulur (Şekil 1.13).
Mafsallı ağırlıksız çubuk vücudun çubuk çizgisi boyunca hareketine karşı koyar. Reaksiyon, çubuğun çizgisi boyunca yönlendirilecektir (Şekil 1.14).
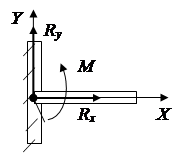
Kör sonlandırma düzlemdeki herhangi bir hareketi ve dönüşü engeller (Şekil 1.15). Eylemi, iki bileşen şeklinde sunulan bir kuvvet ve bir momente sahip bir çift kuvvet ile değiştirilebilir.
 |
 |
 |
|
Şekil 1.11 1.12 Fig.1.13 Fig.1.14 Fig.1.15
1.4 Bir nokta hakkında moment
Bir kuvvetin etkisi altında, katı bir cisim, öteleme hareketiyle birlikte belirli bir merkez etrafında dönebilir. Bir kuvvetin dönme kabiliyeti, bir kuvvet momenti ile karakterize edilir. Kuvvetin dönme etkisi, kuvvetin modülüne, kuvvetin merkezden hareket hattına olan uzaklığına ve dönme düzlemindeki dönme yönüne bağlıdır.
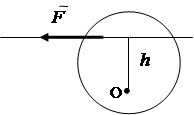
Momentin mutlak değeri, kuvvet modülü ile en kısa mesafenin çarpımına eşittir. h dönme merkezinden kuvvetin etki çizgisine. Mesafe h aranan güç omzu (Şekil 1.16).
M 0 () = F× h , (1.1)
Kuvvet kolu döndürme eğilimindeyse, moment pozitif olarak kabul edilir. h saat yönünün tersine ve saat yönünde dönerken negatif.
Bir nokta etrafındaki kuvvet momentinin özellikleri:
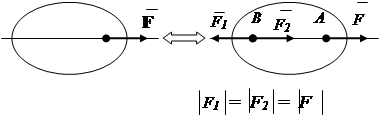
1. Kuvvet uygulama noktası kuvvetin etki çizgisi boyunca hareket ettirildiğinde kuvvet momenti değişmeyecektir.
2. Kuvvetin etki çizgisi, kuvvetin uygulama noktasından geçiyorsa, kuvvet momenti sıfıra eşittir.
3. Bileşik kuvvetin bir nokta etrafındaki momenti toplamına eşittir Bu nokta ile ilgili kuvvet terimlerinin momentleri.
 |
 |
Şekil 1.16. Şekil 1.17.
1.5. Eksene göre kuvvet momenti
Bir eksen etrafındaki kuvvet momenti, bu kuvvetin eksenin düzlemle kesişme noktasına göre eksene dik olan bir düzleme izdüşüm momentidir.
Eksenin pozitif ucundan, kuvvetin yapmaya çalıştığı dönüş saat yönünün tersine olarak görülüyorsa moment pozitif, saat yönünde ise negatif olarak kabul edilir.
![]() . (1.3)
. (1.3)
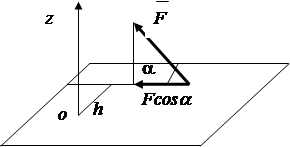
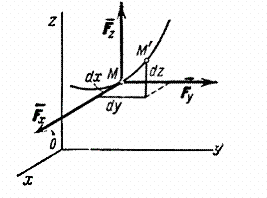
Eksen etrafındaki kuvvet momentini bulmak için ihtiyacınız var (Şekil 1.17);
1. Z eksenine dik bir düzlem çizin.
2. Kuvveti bu düzleme yansıtın ve izdüşüm değerini hesaplayın.
3. Omzunuzu tutun h eksenin düzlemle kesişme noktasından kuvvet projeksiyonunun etki çizgisine kadar ve uzunluğunu hesaplayın.
4. Bu omzun çarpımını ve karşılık gelen işaretle kuvvet projeksiyonunu bulun /
Eksen etrafındaki kuvvet momentinin özellikleri
Eksene göre kuvvet momenti şu durumlarda sıfırdır:
1. , yani kuvvet eksene paraleldir.
2. h =0 , yani kuvvetin etki çizgisi eksenle kesişir.
1.6. Bir çift kuvvetin momenti
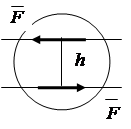
Bir çift kuvvet, vücut üzerinde dönen bir etki uygular. Bir çift kuvvetin momenti, çiftin omzu olarak adlandırılan çiftin kuvvetlerinin etki çizgileri arasındaki en kısa mesafe ile bir kuvvetin ürününe eşittir (Şekil 1.18).
![]() , (1.4)
, (1.4)
burada: - çifti oluşturan kuvvetler;
h- çiftin omzu
 |
Şekil 1.18.
Kuvvetler kolu saat yönünün tersine döndürme eğilimindeyse, çiftin momenti pozitif olarak kabul edilir.
Kuvvet çifti özellikleri
1. Bir çiftin herhangi bir eksen üzerindeki kuvvetlerinin izdüşümlerinin toplamı sıfırdır.
2. Çiftin momentini değiştirmeden, sırasıyla çiftin kuvvetlerinin ve omuzunun değerini aynı anda değiştirebilirsiniz.
3. Bir çift, hareket düzleminde aktarılabilir, ancak çiftin vücut üzerindeki etkisi değişmez.
1.7. Kuvvet sistemlerinin özdeş dönüşümü
Dönüşüm grafiksel veya analitik olarak yapılabilir.
1.7.1. Yakınsak bir kuvvet sisteminin dönüşümü
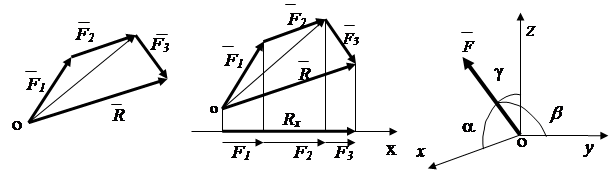
sonuç R iki yakınsak kuvvetin toplamı, kuvvetlerin paralelkenarı aksiyomu temelinde bulunur. (şek.1.9). Herhangi bir sayıda yakınsak kuvvetin geometrik toplamı, iki kuvvet art arda eklenerek belirlenebilir (Şekil 1.19 - vektör çokgen yöntemi).
Çözüm : yakınsak kuvvetler sistemi ( n ) bir bileşke kuvvete indirgenir .
Şekil 1.19 Şekil 1.20. Şekil 1.21.
Analitik olarak, bileşke kuvvet, koordinat eksenleri üzerindeki izdüşümleriyle belirlenebilir.
![]() , (1.5)
, (1.5)
Teoreme göre: bileşkenin eksen üzerindeki izdüşümü, bu eksendeki kuvvetlerin terimlerinin izdüşümlerinin toplamına eşittir (Şekil 1.20). Rx = F 1 x + F 2 x + F 3 x veya genel olarak
R x = å F kx (1.6)
(1.6) dikkate alındığında, sonuç, ifade ile belirlenir.
Elde edilen vektörün yönü, vektör ve eksenler arasındaki açıların kosinüsleri tarafından belirlenir. x , y, z(şek.1.20)
1.7.2. Keyfi bir kuvvetler sisteminin dönüşümü .
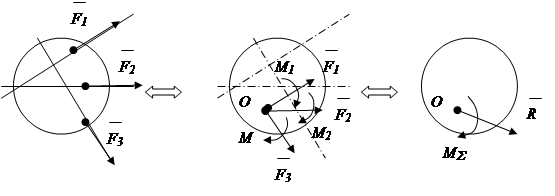
Kuvvetlerin etki çizgileri bir noktada kesişmediği için, kuvvetlerin paralelkenar kuralını doğrudan keyfi bir kuvvetler sistemine uygulamak imkansızdır. Daha önce, kuvvetler sistemi, kuvvetin paralel aktarımına ilişkin teorem temelinde bir merkeze getiriliyordu.
teorem: rijit bir cisme uygulanan bir kuvvet, hareketini değiştirmeden cismin başka bir noktasına paralel olarak aktarılabilirken, momenti aktarılan kuvvetin bulunduğu noktaya göre momentine eşit olan bir çift kuvvet eklenir. aktarıldı (Şekil 1.22).
Bu dönüşümün bir sonucu olarak, yakınsak bir kuvvetler sistemi ve kuvvet çiftlerinin momentlerinin toplamı elde edilir. Yakınsak kuvvetler sisteminin eylemi, toplam kuvvetin eylemiyle, anların eylemiyle - toplam momentle değiştirilir. Toplam vektör * denir ana vektör kuvvet sistemleri, toplam moment * - vurgulamak kuvvet sistemleri.
Şek.1.22
Çözüm: özdeş bir dönüşümün sonucu olarak keyfi bir kuvvet sistemi ana vektöre indirgenir * ve ana nokta * kuvvet sistemleri.
analitik olarak ana vektör ve kuvvetler sisteminin ana momenti, koordinat eksenlerindeki izdüşümleriyle belirlenebilir.
1.8 Kuvvet sistemlerinin denge koşulları
1.8.1. Yakınsak kuvvetler sisteminin dengesi
Tanım olarak (bakınız madde 1.1), bir yakınsak kuvvetler sisteminin hareketi, bir bileşke kuvvetin hareketine eşdeğerdir. Cismin dengesi için sonucun sıfır = 0 olması gerekli ve yeterlidir.
Formül (1.7)'den, yakınsak kuvvetlerin bir uzaysal sisteminin dengesi için, tüm kuvvetlerin projeksiyonlarının toplamının gerekli ve yeterli olduğu sonucu çıkar. eksenler X,Y,Z sıfıra eşitti
å F kx = 0
å fky= 0 (1.10) Fk z = 0
Düz yakınsak bir kuvvetler sisteminin dengesi için, tüm kuvvetlerin X, Y eksenleri üzerindeki izdüşümlerinin toplamının sıfıra eşit olması gerekli ve yeterlidir.
å F kx = 0
å fky = 0 (1.11)
1.8.2. Keyfi bir kuvvetler sisteminin dengesi.
Keyfi bir kuvvetler sisteminin hareketi, ana vektörün ve ana momentin hareketine eşdeğerdir. Denge için koşulun sağlanması gerekli ve yeterlidir.
Keyfi bir kuvvetler sisteminin dengesi için, X, Y, Z eksenleri üzerindeki tüm kuvvetlerin izdüşümlerinin toplamının ve tüm kuvvetlerin momentlerinin toplamının birbirine göre olması gerekli ve yeterlidir. X,Y,Z eksenleri sıfıra eşitti.
å F kx = 0
å fky = 0
å Fkz = 0 (1.13)
å Mx(k) = 0
å M y(k) = 0
å M z(k) = 0
Düz bir keyfi kuvvetler sisteminin dengesi için, ana vektörün X, Y eksenleri üzerindeki izdüşümlerinin toplamının ve O merkezine göre kuvvetlerin momentlerinin cebirsel toplamının eşit olması gerekli ve yeterlidir. sıfır.
åF ky = 0 (1.14)
EM o ( k) = 0
1.9. Bölümde öz kontrol için sorular
1. Kesinlikle katı bir cismin, maddi bir noktanın, bir kuvvetin, bir kuvvetin hareket hattının, keyfi bir kuvvetler sisteminin bir kuvvetler sisteminin (düz, uzaysal, yakınsak) bir tanımını verin.
2. Kuvvetin eksen üzerindeki, düzlemdeki izdüşümüne ne denir?
3. Kuvvet momenti neye denir, bir noktaya göre kuvvet momenti nasıl belirlenir?
4. Kuvvet, hareket çizgisi boyunca aktarıldığında, verilen bir noktaya göre kuvvet momenti değişir mi?
5. Verilen bir noktaya göre kuvvet momenti hangi durumda sıfıra eşittir?
6. Hangi kuvvet sistemine bir çift kuvvet denir, bir çift kuvvetin momenti nedir?
7. Bağlantıya ne denir? Tahvillerden kurtulma ilkesi nedir? Ana bağlantı türlerini listeleyin, tepkilerini gösterin.
8. Uzayda ve bir düzlemde bulunan yakınsak ve keyfi kuvvet sistemlerinden oluşan bir sistemin dengesi için koşullar ve denklemler nelerdir?
9. Statik problemlerini çözme prosedürünü formüle edin.
2. Kinematik
Kinematik- mekanik hareketin genel geometrik özelliklerini uzayda ve zamanda meydana gelen bir süreç olarak ele alan teorik mekaniğin bir bölümü. Hareket eden nesneler geometrik noktalar veya geometrik cisimler. Buna göre çalışma nokta kinematiği ve rijit cisim kinematiği olarak ikiye ayrılmıştır.
2.1 Kinematiğin temel kavramları
Bir noktanın (cismin) hareket yasası- uzayda bir noktanın (vücudun) konumunun zamana bağımlılığı.
nokta yörünge- hareketi sırasında uzayda bir noktanın konumlarının yeri.
Nokta (vücut) hızı- uzayda bir noktanın (vücudun) konumunun zaman içindeki değişiminin bir özelliği.
Nokta (gövde) ivmesi- bir noktanın (vücut) hızındaki zaman değişikliğinin özelliği
2.2. nokta kinematiği
2.2.1 Nokta hareketini belirleme yöntemleri
Bir noktanın hareketini ayarlamak, seçilen referans sistemine göre konumunda bir değişiklik ayarlamak anlamına gelir. Üç ana referans sistemi vardır: vektör, koordinat, doğal. Buna göre, bir noktanın hareketini belirlemenin üç yolu vardır.
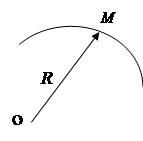
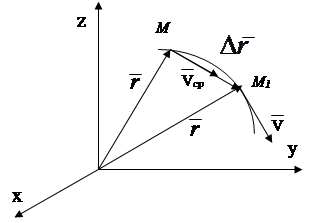
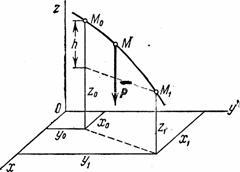
Bir vektör sisteminde, bir noktanın orijine göre konumu yarıçap vektörü tarafından verilir (Şekil 2.1). hareket kanunu
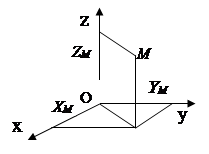
OXYZ koordinat sistemindeki bir noktanın konumu üç ile verilir. X,Y,Z koordinatları(şek.2.2). hareket kanunu x = x ( t ), y = y ( t ), z = z ( t ).
Doğal referans sistemindeki bir noktanın konumu, mesafe ile verilir. S yörünge boyunca orijinden bu noktaya kadar (Şekil 2.3). hareket kanunu s = s ( t ).
 |
 |
Şekil 2.1 Pirinç. 2.2 Şek.2.3
Bir noktanın hareketinin doğal bir şekilde belirtilmesi halinde hareket belirlenirse aşağıdakiler bilinir:
1. Hareketin yörüngesi.
2. Yay koordinatının sayımının başlangıcı ve yönü.
3. Hareket denklemi.
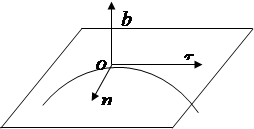
Doğal hareket belirleme yöntemiyle, diğer yöntemlerden farklı olarak, yörünge boyunca nokta ile birlikte hareket eden hareketli koordinat eksenleri kullanılır. Bu tür eksenler (Şekil 2.4).
Teğet () - yörüngeye teğet olarak artan yay koordinatları yönünde yönlendirilir.
Temel normal ( P) eğrinin içbükeyliğine doğru yönlendirilir.
iki normal ( içinde) t, n eksenlerine dik olarak yönlendirilir.
 |
Pirinç. 2.4
2.2.2 Bir noktanın kinematik özelliklerinin belirlenmesi
nokta yörünge
Vektör referans sisteminde, yörünge şu ifadeyle tanımlanır:
Koordinat referans sisteminde yörünge, nokta hareketi yasasına göre belirlenir ve ifadelerle tanımlanır. z = f ( x , y ) - uzayda veya y = f(x) - düzlemde.
Doğal bir referans sisteminde yörünge önceden belirlenir.
Nokta hızı
Tanıma göre (bkz. paragraf 2.1), hız, bir noktanın (cismin) uzaydaki konumunun zaman içindeki değişimini karakterize eder.
Bir vektör koordinat sisteminde bir noktanın hızını belirleme
Bir vektör koordinat sisteminde bir noktanın hareketini belirtirken, hareketin bir zaman aralığına oranına bu zaman aralığındaki hızın ortalama değeri denir.
Zaman aralığı sonsuz küçük bir değer olarak alındığında, hızın değeri şu şekilde elde edilir: şu an zaman (anlık hız değeri)
 (2.1)
(2.1)
Ortalama hız vektörü nokta hareketi yönünde vektör boyunca yönlendirilir, anlık hız vektörü nokta hareketi yönünde yörüngeye teğetsel olarak yönlendirilir (Şekil 2.5).
 |
Şekil 2.5
Çözüm: bir noktanın hızı, hareket yasasının zamana göre türevine eşit bir vektör miktarıdır.
Türevin aşağıdaki özelliğini not eder ve daha fazla akıl yürütmede kullanırız : bir miktarın zamana göre türevi, o miktarın değişim oranını belirler.
Bir koordinat referans sisteminde bir noktanın hızını belirleme
Türevin özelliğine dayanarak, noktanın koordinatlarının değişim oranını belirleriz.
Dikdörtgen koordinat sistemine sahip bir noktanın tam hızının modülü şuna eşit olacaktır:
![]() (2.3)
(2.3)
Hız vektörünün yönü, direksiyon açılarının kosinüsleri tarafından belirlenir.

hız vektörü ve koordinat eksenleri arasındaki açılar nerede.
Doğal bir referans sisteminde bir noktanın hızını belirleme
Doğal bir referans sistemindeki bir noktanın hızı, bir noktanın hareket yasasının türevi olarak tanımlanır.
V = (2.4)
Önceki sonuçlara göre, hız vektörü, nokta hareketi yönünde ve eksenlerde yörüngeye teğet olarak yönlendirilir. not sadece bir projeksiyon tarafından belirlenir.
nokta ivmesi
Tanım olarak, hızlanma hızdaki değişikliği karakterize eder, yani. hız değişim oranı.
Bir vektör referans çerçevesindeki bir noktanın ivmeleri
Türevin özelliğine göre
Hız vektörü büyüklük ve yön olarak değişebilir. Bir vektörün artışını belirlemek için vektörlerin başlangıçlarını eşleştiririz (Şekil 2.6). İvme vektörü, hız vektörünün artış çizgisi boyunca, yani yörüngenin eğriliğine doğru yönlendirilir.
Şekil 2.6
Bir koordinat referans sistemindeki bir noktanın ivmesi
Bir noktanın koordinatlarındaki değişimin ivmesi, bu koordinatların değişim oranlarının zamana göre türevine eşittir.
bir x =; bir y =; bir z = .
Dikdörtgen bir koordinat sistemindeki toplam ivme, ifade ile belirlenecektir.
a
= ![]() , (2.6)
, (2.6)
İvme vektörünün yön kosinüsleri
 .
.
Doğal referans sisteminde bir noktanın ivmesi
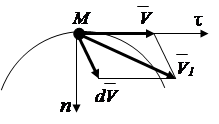
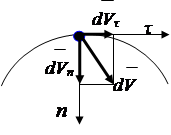
Hız vektörünün artışı (Şekil 2.7), eksenlere paralel bileşenlere ayrıştırılabilir. doğal sistem koordinatlar
![]() , (2.7)
, (2.7)
Eşitliğin (2.7) sol ve sağ taraflarını bölerek dt, alırız
![]() , (2.8)
, (2.8)
burada: - teğetsel ivme, (2.9)
Normal hızlanma, (bkz. türetme, madde 43)
burada R, noktanın yakınındaki yörüngenin eğrilik yarıçapıdır.
 |
Pirinç. 2.7
2.3. Rijit Gövde Kinematiği
Bir noktanın kinematiğinin aksine, katı cisimlerin kinematiğinde iki ana görev çözülür:
Hareketin ayarlanması ve bir bütün olarak vücudun kinematik özelliklerinin belirlenmesi;
Vücut noktalarının kinematik özelliklerinin belirlenmesi.
Kinematik özellikleri belirleme ve belirleme yöntemleri, cisimlerin hareket türlerine bağlıdır.
Bu kılavuzda üç tür hareket ele alınmaktadır: öteleme, sabit bir eksen etrafında dönme ve katı bir cismin düzlem-paralel hareketi.
2.3.1. Katı bir cismin öteleme hareketi
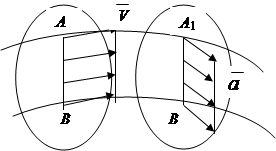
Translasyonel, vücudun iki noktasından çizilen düz bir çizginin orijinal konumuna paralel kaldığı bir harekettir (Şekil 2.8).
Teorem kanıtladı: öteleme hareketinde, vücudun tüm noktaları aynı yörüngeler boyunca hareket eder ve zamanın her anında mutlak değer ve yönde aynı hız ve ivmeye sahiptir (Şekil 2.8).
Çözüm: Katı bir cismin öteleme hareketi, noktalarından herhangi birinin hareketi ile belirlenir ve bu nedenle, hareketinin görevi ve incelenmesi, bir noktanın kinematiğine indirgenir.
 |
Pirinç. 2.8 Şek. 2.9
2.3.2 Sabit bir cismin sabit bir eksen etrafında dönme hareketi.
Sabit bir eksen etrafında dönme, vücuda ait iki noktanın tüm hareket süresi boyunca sabit kaldığı katı bir cismin hareketidir.
Vücudun konumu, j dönüş açısı ile belirlenir (Şekil 2.9). Bir açının ölçü birimi radyandır. (radyan - orta köşe yay uzunluğu yarıçapa eşit olan bir daire, tam açı daire 2p radyan içerir.)
Bir cismin sabit bir j = j(t) ekseni etrafında dönme hareketi yasası. Cismin açısal hızı ve açısal ivmesi farklılaşma yöntemi ile belirlenecektir.
Açısal hız, rad/s; (2.10)
Açısal ivme, rad/s 2 (2.11)
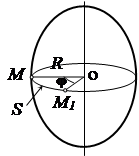
saat döner hareket cisimler sabit bir eksen etrafında, dönme ekseni üzerinde olmayan noktaları ise dönme ekseni merkezli dairelerde hareket eder.
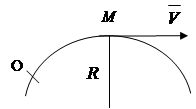
Gövdeyi eksene dik bir düzlemle kesersek, dönme ekseni üzerinde bir nokta seçin. İTİBAREN ve keyfi nokta M, sonra nokta M nokta etrafında tarif edecek İTİBAREN yarıçaplı daire R(Şekil 2.9). Sırasında dt açı boyunca temel bir dönüş vardır, nokta ise M yörünge boyunca bir mesafe boyunca hareket edecektir.Haydi doğrusal hız modülünü belirleyelim:
 (2.12)
(2.12)
nokta ivmesi M Bilinen bir yörünge için bileşenleri tarafından belirlenir, bkz. (2.8)
![]() ,
,
Formüllerde (2.12) ifadesini değiştirerek şunu elde ederiz:
 , .
, . , (2.13)
, (2.13)
burada: - teğetsel ivme,
Normal hızlanma.
2.3.3. Katı bir cismin düzlemsel paralel hareketi
Düzlem-paralel, tüm noktalarının bir sabit düzleme paralel düzlemlerde hareket ettiği katı bir cismin hareketidir (Şekil 2.10). Bir cismin hareketini incelemek için bir bölümün hareketini incelemek yeterlidir. S bu gövdeyi sabit düzleme paralel bir düzlemle bölüm hareketi S düzleminde iki temel hareketten oluşan karmaşık bir hareket olarak düşünülebilir: a) öteleme ve dönme; b) mobil (anlık) merkeze göre dönme.
İlk varyantta bölümün hareketi, noktalarından birinin (kutup) hareket denklemleri ve bölümün direğin etrafındaki dönüşü ile verilebilir (Şekil 2.11). Kesitin herhangi bir noktası direk olarak alınabilir.
 |
 |
Pirinç. 2.10 Şek. 2.11
Hareket denklemleri şu şekilde yazılacaktır:
X bir = XA ( t )
Y ANCAK = Y ANCAK ( t ) (2.14)
j ANCAK = j ANCAK ( t )
Direğin kinematik özellikleri, hareket denklemlerinden belirlenir.
Kendi düzleminde hareket eden bir düzlem şeklinin herhangi bir noktasının hızı, kutbun hızının toplamıdır (nokta bölümünde keyfi olarak seçilir). ANCAK) ve direğin etrafındaki dönüş hızı (noktanın dönüşü AT noktanın etrafında ANCAK).
Hareketli düz bir şeklin bir noktasının ivmesi, sabit referans çerçevesine göre direğin ivmesi ile direğin etrafındaki dönme hareketinden kaynaklanan ivmenin toplamıdır.
![]() (2.15)
(2.15)
![]() (2.16)
(2.16)
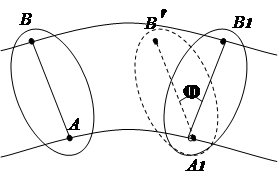
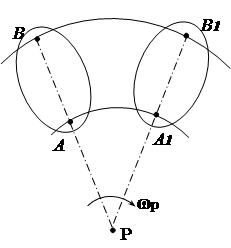
İkinci varyantta bölümün hareketi, hareketli (anlık) merkez etrafında dönme olarak kabul edilir. P(Şekil 1.12). Bu durumda, bölümün herhangi bir B noktasının hızı, dönme hareketi formülü ile belirlenecektir.
![]() (2.17)
(2.17)
Anlık merkez etrafındaki açısal hız R bölümün herhangi bir noktasının, örneğin A noktasının hızı biliniyorsa belirlenebilir.
 (2.18)
(2.18)
Şekil2.12
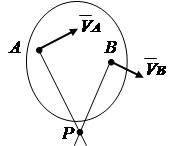
Anlık dönme merkezinin konumu, aşağıdaki özelliklere göre belirlenebilir:
Noktanın hız vektörü yarıçapa diktir;
Bir noktanın hız modülü, noktadan dönme merkezine olan mesafeyle orantılıdır ( V = w ∙ R) ;
Dönme merkezindeki hız sıfırdır.
Anlık merkezin konumunu belirlemenin bazı durumlarını ele alalım.
1. Düz bir şeklin iki noktasının hızlarının yönleri bilinmektedir (Şekil 2.13). Yarıçap çizgileri çizelim. Anlık dönüş merkezi R hız vektörlerine çizilen diklerin kesişiminde bulunur.
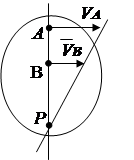
2. A ve B noktalarının hızları biliniyor ve vektörler ve birbirine paralel ve doğru AB dik (Şekil 2. 14). Bu durumda, anlık dönme merkezi doğru üzerindedir. AB. Bunu bulmak için, bağımlılığa dayalı bir hız orantılılığı çizgisi çiziyoruz. V = w R .
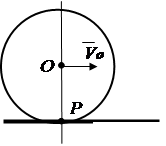
3. Gövde başka bir gövdenin sabit yüzeyinde kaymadan yuvarlanır (Şekil 2.15). Şu anda cisimlerin temas noktası sıfır hıza sahipken, cismin diğer noktalarının hızları sıfıra eşit değil. temas noktası R anlık dönüş merkezi olacaktır.
 |
 |
 |
Pirinç. 2.13 Pirinç. 2.14 Pirinç. 2.15
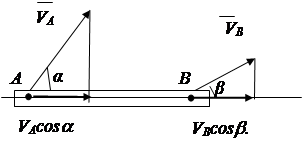
Göz önünde bulundurulan seçeneklere ek olarak, bir kesit noktasının hızı, katı bir cismin iki noktasının hızlarının izdüşümleri üzerindeki teorem temelinde belirlenebilir.
teorem: rijit bir cismin iki noktasının hızlarının bu noktalardan çizilen düz bir çizgi üzerine izdüşümü birbirine eşittir ve eşit olarak yönlendirilir .
Kanıt: Mesafe AB değiştirilemez, bu nedenle
V Ve cosa az ya da çok olamaz V cosb'de (Şekil 2.16).
 |
||
Pirinç. 2.16
Çözüm: V ANCAK cosa= V AT kosb. (2.19)
2.4. Karmaşık nokta hareketi
Önceki paragraflarda, mutlak hareket olarak adlandırılan sabit bir referans çerçevesine göre bir noktanın hareketi ele alındı. Pratikte, sabit bir sisteme göre hareket eden bir noktanın bir koordinat sistemine göre hareketinin bilindiği problemler vardır. Bu durumda noktanın sabit sisteme göre kinematik özelliklerinin belirlenmesi gerekir.
Şunu söylemek gelenekseldir: bir noktanın hareketli bir sisteme göre hareketi - akraba, hareketli sistemle birlikte bir noktanın hareketi - taşınabilir, bir noktanın sabit bir sisteme göre hareketi - mutlak. Buna göre, hızlar ve ivmeler denir:
göreceli; - figüratif; -mutlak.
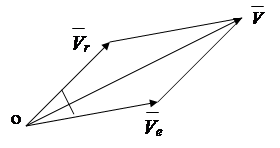
Hız toplama teoremine göre, bir noktanın mutlak hızı şuna eşittir: vektör toplamı bağıl ve taşınabilir hızlar (Şek.).
![]() , (2.20)
, (2.20)
Hızın mutlak değeri kosinüs yasası ile belirlenir.
![]() , (2.21)
, (2.21)
Şekil2.17
Paralelkenar kuralına göre hızlanma şu şekilde belirlenir: sadece öteleme hareketinde
![]() , (2.22)
, (2.22)
Çevirisel olmayan taşınabilir hareketle, döner veya Coriolis adı verilen üçüncü bir ivme bileşeni ortaya çıkar.
![]() , (2.23)
, (2.23)
nerede ![]()
Coriolis ivmesi sayısal olarak eşittir
![]() ,
,
a, vektörler arasındaki açıdır ve
N.E.'ye göre Coriolis ivme vektörünün yönünü belirlemek uygundur. Zhukovsky: vektörü öteleme dönüş eksenine dik bir düzleme yansıtın, izdüşümünü öteleme dönüşü yönünde 90 derece döndürün. Ortaya çıkan yön, Coriolis ivmesinin yönüne karşılık gelecektir.
2.5 Bölümde otokontrol için sorular
1. Kinematiğin temel görevleri nelerdir? Kinematik özellikleri adlandırın.
2. Bir noktanın hareketini belirleme ve kinematik özellikleri belirleme yöntemlerini adlandırın.
3. Bir cismin öteleme, sabit bir eksen etrafında dönme, düzlem-paralel hareketinin tanımını verin.
4. Katı bir cismin öteleme, sabit bir eksen etrafında dönme ve düzlem-paralel hareket sırasındaki hareketi nasıl belirlenir ve cismin bu hareketleri sırasında bir noktanın hızı ve ivmesi nasıl belirlenir?
3. Dinamikler
3.1 Dinamik sorunları
Dinamikte iki tür problem çözülür. Birincisi, tanımlamak aktif kuvvetler maddi bir nesnenin (nokta veya sistem) hareket yasası verildi. İkinci görev, birincinin tersidir: Maddi bir nesnenin hareket yasası, ona etki eden bilinen kuvvetlerle belirlenir.
3.2. Dinamiğin temel kavramları
eylemsizlik- maddi cisimlerin, dış kuvvetler bu durumu değiştirene kadar bir dinlenme veya düzgün doğrusal hareket durumunu sürdürme özelliği.
Ağırlık- vücudun ataletinin nicel bir ölçüsü. Kütle birimi kilogramdır (kg).
Malzeme noktası- bu sorunu çözerken boyutları ihmal edilen kütleli bir vücut.
Mekanik bir sistemin kütle merkezi- koordinatları formüllerle belirlenen geometrik bir nokta.
nerede mk , x k , yk , zk- k'nin kütlesi ve koordinatları - mekanik sistemin bu noktası,
m sistemin kütlesidir.
Düzgün bir ağırlık alanında, kütle merkezinin konumu, ağırlık merkezinin konumu ile çakışır.
Bir malzeme gövdesinin eksen etrafındaki eylemsizlik momenti dönme hareketi sırasında nicel bir eylemsizlik ölçüsüdür.
Maddesel bir noktanın eksen etrafındaki eylemsizlik momenti, noktanın kütlesinin ürününe ve noktanın eksene olan uzaklığının karesine eşittir.
JZ = m × r 2 (3.2)
Sistemin (gövde) eksen etrafındaki eylemsizlik momenti, tüm noktaların eylemsizlik momentlerinin aritmetik toplamına eşittir.
JZ = å mk × rk 2 (3.3)
Maddi bir noktanın eylemsizlik kuvveti- bir noktanın kütlesinin ve ivme modülünün çarpımına mutlak değerde eşit ve ivme vektörünün karşısına yönlendirilmiş bir vektör miktarı
![]() (3.4)
(3.4)
Maddi bir cismin eylemsizlik kuvveti- cismin kütlesi ile cismin kütle merkezinin ivme modülünün çarpımına mutlak değerde eşit ve kütle merkezinin ivme vektörünün karşısına yönlendirilmiş bir vektör miktarı
![]() ,
(3.5)
,
(3.5)
vücudun kütle merkezinin ivmesi nerede.
Elemental Kuvvet İtkisi- sonsuz küçük bir zaman aralığında kuvvet vektörünün ürününe eşit vektör miktarı dt
![]() , (3.6)
, (3.6)
için toplam itme kuvveti D t temel dürtülerin integraline eşittir
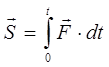 (3.7)
(3.7)
temel iş kuvvet- skaler değer dA, kuvvet vektörünün skaler ürününe ve sonsuz küçük yer değiştirmeye eşit d .
Vektörlerin skaler çarpımı, modüllerinin çarpımına ve vektörlerin yönleri arasındaki açının kosinüsüne eşittir.
dA = F × ds × çünkü a , (3.8)
a, yer değiştirme ve kuvvet vektörlerinin yönleri arasındaki açıdır.
Uygulandığı noktanın son yer değiştirmesi üzerindeki kuvvetin işi, yer değiştirme üzerinden alınan temel işin integraline eşittir.
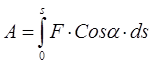 (3.9)
(3.9)
İşin birimi Joule'dür (1 J=1 N×m).
Maddi bir noktanın hareket miktarı- m kütlesi ile hızının çarpımına eşit bir vektör miktarı.
Bir mekanik sistemin momentumu, noktalarının momentumlarının vektör toplamına eşittir.
![]() (3.11)
(3.11)
veya formüller (3.1) dikkate alınarak.
burada: m mekanik sistemin kütlesidir,
Sistemin kütle merkezinin hız vektörü.
Maddi bir noktanın kinetik enerjisi- skaler değer T, noktanın kütlesinin çarpımının yarısına ve hızının karesine eşit.
T = (3.13)
Mekanik bir sistemin kinetik enerjisi toplamına eşittir. kinetik enerjiler tüm noktaları.
3.3. dinamik aksiyomları
İlk aksiyom eylemsizlik yasasıdır. .
Serbest bir madde noktasına hiçbir kuvvet etki etmezse veya dengeli bir kuvvetler sistemi etki etmezse, nokta durağan veya düzgün doğrusal hareket halinde olacaktır.
İkinci aksiyom, ivmenin orantılılık yasasıdır. .
Maddi bir noktaya etkiyen kuvvetin verdiği ivme, bu kuvvetle orantılıdır ve kuvvetin yönü ile örtüşür.
(3.15) ifadesi denir dinamiğin temel yasası .
Üçüncü aksiyom, karşıtlık yasasıdır. .
İki maddi noktanın birbirine etki ettiği kuvvetler mutlak değerde eşittir ve bu noktaları zıt yönlerde birleştiren doğru boyunca yönlendirilir.
Dördüncü aksiyom, kuvvetlerin eyleminin bağımsızlığı yasasıdır. .
Bir kuvvet sistemi maddesel bir noktaya etki ettiğinde, bu noktanın toplam ivmesi, her bir kuvvetin hareketinden kaynaklanan ivmelerin geometrik toplamına eşittir.
3.4. Dinamiğin Diferansiyel Denklemleri
Bir noktanın diferansiyel hareket denklemleri, bir noktanın ivmesini, üzerine etki eden kuvvetlerle ilişkilendirir. Aslında, diferansiyel denklemler, dinamiğin temel yasasının açık bir diferansiyel formda kaydıdır.
Bir noktanın mutlak hareketi için (ataletsiz bir referans çerçevesinde hareket), diferansiyel denklem şu şekildedir:
 , (3.18)
, (3.18)
Vektör denklemi (3.17) dikdörtgen bir atalet koordinat sisteminin eksenleri üzerindeki izdüşümlerde yazılabilir.
![]() ,
,
 , (3.19)
, (3.19)
![]() ,
,
Noktanın bilinen bir yörüngesi ile, denklem (3.18) doğal koordinat sisteminin eksenleri üzerindeki izdüşümlerde yazılabilir.
![]() , (3.20)
, (3.20)
![]()
(2.8) dikkate alındığında, denklemler şu şekli alır:
 (3.21)
(3.21)
3.5 Genel dinamik teoremleri
Genel dinamik teoremleri, mekanik hareket ölçümleri ile mekanik etkileşim arasındaki ilişkiyi kurar. Teoremlerin sonuçları, temel dinamik yasasının özdeş bir dönüşümünün sonucudur.
Momentumdaki değişimle ilgili teorem : bir maddi noktanın (mekanik sistem) sonlu bir zaman periyodu boyunca momentumundaki değişim, itkilerin toplamına eşittir. dış kuvvetler aynı süre için
![]() - maddi bir nokta için; (3.22)
- maddi bir nokta için; (3.22)
![]() - mekanik sistem için. (3.23)
- mekanik sistem için. (3.23)
Kinetik enerji değişim teoremi : Bir noktanın (mekanik sistem) hareketi sırasındaki kinetik enerjisindeki değişim, bu harekete etki eden tüm dış kuvvetlerin çalışmalarının toplamına eşittir.
 - maddi bir nokta için (3.24)
- maddi bir nokta için (3.24)
![]() - mekanik bir sistem için (3.25)
- mekanik bir sistem için (3.25)
Bir mekanik sistemin kinetik enerjisi, (3.14)'e göre belirlenirken, katılar için aşağıdaki bağımlılıklar türetilmiştir.
Cismin öteleme hareketi ile, (3.26)
Cismin dönme hareketi sırasında, (3.27)
 - vücudun düzlem paralel hareketi ile. (3.28)
- vücudun düzlem paralel hareketi ile. (3.28)
Bazı homojen cisimlerin eylemsizlik momentleri
 |
Pirinç. 3.1 Şekil 3.2. R Şekil 3.3.
Eksene göre silindirin atalet momenti (Şekil 3.1.)
Çubuğun z ekseni etrafındaki eylemsizlik momenti (Şekil 3.2)
![]()
Dikdörtgen bir plakanın x ve y eksenleri etrafındaki atalet momenti (Şekil 3.3)
Topun atalet momenti aşağıdaki formülle belirlenir:
Genel durumda, kuvvetlerin işi (3.8), (3.9)'a göre belirlenir.Kuvvetlerin etkisinin bir dizi durumunda, iş özel bağımlılıklarla belirlenebilir.
Yerçekimi işi
nerede: - Yerçekimi,
Dikey olarak vücut pozisyonunda değişiklik.
Vücudun dönme hareketi sırasında kuvvetin işi
, (3.30)
nerede: - kuvvet momenti,
Vücudun açısal hızı.
İşin skaler bir nicelik olarak pozitif veya negatif olabileceğini unutmayın. Kuvvetin yönü hareketin yönü ile çakışıyorsa iş pozitif olacaktır.
3.6 d'Alembert ilkesi
Cisimlerin hareketini incelemek için yukarıdaki yöntemler Newton yasalarına dayanmaktadır. Diğer ilkelere dayalı yöntemler geliştirilmiştir. Onlardan biri d'Alembert ilkesi.İlke formüle edilmiştir: Herhangi bir anda, noktaya etki eden kuvvetlere atalet kuvvetleri eklenirse, ortaya çıkan kuvvetler sistemi dengelenecektir.
![]() , (3.31)
, (3.31)
veya mekanik sistem için
![]()
D'Alembert ilkesi, dinamik problemlerin çözümüne daha fazla başvurmayı mümkün kılar. basit yöntemler Statik, bu nedenle mühendislik uygulamalarında yaygın olarak kullanılmaktadır.
3.7. Bölümde öz kontrol için sorular
1. Dinamiklerin ana görevlerini formüle edin.
2. Kütle, eylemsizlik momenti, kuvvet impulsu, kuvvet işi, momentum, kinetik enerji tanımlarını verin.
3. Dinamiğin temel yasalarını formüle edin.
4. Hangi denklem denir diferansiyel denklem hoparlörler? Diferansiyel denklemleri kullanarak dinamik problemlerini çözme algoritması nedir?
5. Genel dinamik teoremlerini formüle edin.
6. d'Alembert ilkesini formüle edin. Eylemsizlik kuvvetleri nasıl belirlenir?
7. Olası hareketlerin ilkesini formüle edin. Olası yer değiştirmeler ilkesi hangi koşullar altında geçerlidir?
Bu bölümde, cisimlerin öteleme ve dönme hareketi sırasında sabit bir kuvvetin yaptığı işi ve geliştirilen gücü belirlemeye yönelik problemler ele alınmaktadır (E. M. Nikitin, § 81-87).
§ 44. Öteleme hareketinde iş ve güç
Sabit bir P kuvvetinin, kuvvetin uygulama noktası tarafından geçilen s yolunun düz bir bölümü üzerindeki işi, formülle belirlenir.
(1) A = Ps cos α,
α, kuvvetin yönü ile hareketin yönü arasındaki açıdır.
α = 90°'de
cos α = cos 90° = 0 ve A = 0,
yani hareket yönüne dik etki eden bir kuvvetin işi sıfırdır.
Kuvvetin yönü hareket yönü ile çakışıyorsa, o zaman α = 0, dolayısıyla cos α = cos 0 = 1 ve formül (1) basitleştirilir:
(1") A = Ps.
Bir kuvvet değil, birkaç kuvvet genellikle bir noktaya veya bir gövdeye etki eder, bu nedenle, problemleri çözerken, ortaya çıkan kuvvetler sisteminin çalışması üzerine teoremi kullanmanız önerilir (E. M. Nikitin, § 83):
(2) A R = ∑ A ben ,
yani, belirli bir yol üzerindeki herhangi bir kuvvet sisteminin bileşkesinin işi, bu sistemin aynı yol üzerindeki tüm kuvvetlerinin işinin cebirsel toplamına eşittir.
Belirli bir durumda, kuvvetler sistemi dengelendiğinde (vücut düzgün ve düz bir çizgide hareket eder), kuvvetler sisteminin bileşkesi sıfıra eşittir ve dolayısıyla A R = 0 olur. Bu nedenle, bir noktanın veya cismin düzgün ve doğrusal hareketi ile denklem (2) şu şekli alır:
(2") ∑ Ai = 0,
yani, belirli bir yol üzerindeki dengeli bir kuvvetler sisteminin işinin cebirsel toplamı sıfıra eşittir.
Bu durumda işi pozitif olan kuvvetlere itici kuvvetler, işi negatif olan kuvvetlere direnç kuvvetleri denir. Örneğin, vücut aşağı hareket ettiğinde - yerçekimi - itici güç ve işi pozitiftir ve vücut yukarı doğru hareket ettiğinde yerçekimi bir direnç kuvvetidir ve yerçekimi işi negatiftir.
P kuvvetinin bilinmediği, işinin belirlenmesi gereken durumlarda problemler çözülürken iki yöntem (yöntem) önerilebilir.
1. Problem koşulunda belirtilen kuvvetleri kullanarak, P kuvvetini belirleyin ve ardından çalışmasını hesaplamak için (1) veya (1") formülünü kullanın.
2. P kuvvetini doğrudan belirlemeden, A p - formül (2) ve (2") kullanarak gerekli kuvvetin işini belirleyin, sonuçtaki çalışma üzerindeki teoremi ifade edin.
Sabit bir kuvvetin çalışması sırasında geliştirilen güç, formülle belirlenir.
(3) N = A/t veya N = (Ps cos α)/t.
P kuvvetinin işini belirlerken, v \u003d s / t noktasının hızı sabit kalırsa, o zaman
(3") N = Pv cos α.
Noktanın hızı değişirse, s / t \u003d v cf - ortalama sürat ve sonra formül (2") ortalama gücü düşürür
Nav = Pv av cos α.
katsayı faydalı eylem(k.p.d.) iş yaparken işin oranı olarak tanımlanabilir
(4) η = Bir alan /A,
nerede Bir kat - faydalı çalışma; A, yapılan tüm iştir veya ilgili kapasitelerin oranı olarak:
(4") η = N kat /N.
İşin SI birimi 1 joule (J) = 1 N * 1 m'dir.
SI güç birimi 1 watt (W) = 1 J / 1 sn'dir.
Popüler bir sistem dışı güç birimi beygir gücüdür (hp):
1000 W = 1,36 litre. İle birlikte. veya 1 l. İle birlikte. = 736 W
Watt ve beygir gücü arasında geçiş yapmak için formülleri kullanın
N (kW) = 1,36 N (hp)
N (hp) \u003d 0,736 N (kW).
Ders 2. Çalışma. Güç. Bir noktanın kinetik enerjisindeki değişime ilişkin teorem.
Bu ders aşağıdaki soruları kapsar:
Zorla çalışma.
Güç.
İş hesaplama örnekleri.
Potansiyel enerji
Kinetik enerji
Bir noktanın kinetik enerjisindeki değişime ilişkin teorem.
Moment teoremi.
Bu konuların incelenmesi, mekanik bir sistemin kütle merkezinin dinamiği, katı bir cismin dönme hareketinin dinamiği, bir mekanik sistemin kinetik momenti, "Makineler teorisi ve" disiplinlerindeki problemleri çözmek için gereklidir. mekanizmalar" ve "Makine parçaları".
Zorla çalışma. Güç.
Bir kuvvetin bir miktar yer değiştirmesi olan bir cisme uyguladığı hareketi karakterize etmek için, bir kuvvetin işi kavramı tanıtılır.
Şekil 16
Bu durumda, iş, değişimi belirleyen kuvvetin hareketini karakterize eder. modül hareket noktasının hızı.
Önce sonsuz küçük bir yer değiştirme üzerindeki bir kuvvetin temel işi kavramını tanıtalım. ds. Bir kuvvetin temel işi (Şekil 16) skaler bir niceliktir:
nokta yer değiştirmesi yönünde yönlendirilen yörüngeye teğet üzerindeki kuvvetin izdüşümü nerede ve bu teğet boyunca yönlendirilen noktanın sonsuz küçük yer değiştirmesidir.
Bu tanım, bir noktanın hız modülünde bir değişikliğe yol açan bir kuvvetin hareketinin bir özelliği olarak iş kavramına karşılık gelir. Gerçekten de, kuvveti bileşenlere ayırırsak ve , o zaman sadece bileşen noktanın hızının modülünü değiştirecek ve noktaya teğetsel bir ivme kazandıracaktır. v(noktaya normal ivme kazandırır) veya hareket serbest değilse bağlantı üzerindeki basıncı değiştirir. Bileşen hız modülünü etkilemeyecek, yani dedikleri gibi, kuvvet "iş üretmeyecek".
Bunu fark ederek şunları elde ederiz:
![]() . (1)
. (1)
Böylece, temel iş kuvvet, noktanın hareket yönündeki izdüşümünün, temel yer değiştirme ile çarpımına eşittir veya kuvvetin temel işi, kuvvet modülünün, temel yer değiştirme ve kosinüs ile çarpımına eşittir. kuvvetin yönü ile yer değiştirme yönü arasındaki açı.
Açı dar ise, iş pozitiftir. Özellikle temel işler için .
Açı geniş ise, iş negatiftir. Özellikle temel işler için .
Eğer açı, yani kuvvet yer değiştirmeye dik yönlendirilirse, kuvvetin temel işi sıfırdır.
Temel iş için analitik bir ifade bulalım. Bunu yapmak için, kuvveti parçalara ayırırız , koordinat eksenlerinin yönlerinde (Şekil 17; kuvvetin kendisi çizimde gösterilmemiştir).
Şekil 17
Bir temel yer değiştirme, koordinat eksenleri boyunca yer değiştirmelerden oluşur. x, y, z - nokta koordinatları M. Daha sonra kuvvetin yer değiştirme üzerindeki işi, bileşenlerinin yer değiştirmeler üzerindeki çalışmalarının toplamı olarak hesaplanabilir.
Ancak, yer değiştirme üzerinde yalnızca bileşen çalışır ve işi eşittir. Yer değiştirmeler üzerinde çalışma ve benzer şekilde hesaplanır. Sonunda buluyoruz:
Formül, bir kuvvetin temel işi için analitik bir ifade verir.
Herhangi bir sonlu yer değiştirmede bir kuvvetin yaptığı iş M 0 M 1, karşılık gelen temel işlerin tam toplamı olarak hesaplanır ve şuna eşit olacaktır:
![]() veya
veya
![]() .
.
Sonuç olarak, herhangi bir yer değiştirme M üzerindeki kuvvet işi 0 M 1 bu yer değiştirme boyunca alınan temel işin integraline eşittir.İntegralin sınırları, noktalarda integrasyon değişkenlerinin değerlerine karşılık gelir. M 0 ve M 1 .
Şekil 18
Değer sabit ise (= const), yer değiştirmeyi gösterir M 0 M 1 ile elde ederiz: .
Böyle bir durum, etki eden kuvvetin modül ve yönde sabit olduğu zaman gerçekleşebilir ( F= const) ve kuvvetin uygulandığı nokta düz bir çizgide hareket eder (Şekil 18). Bu durumda ![]() ve kuvvetin işi
ve kuvvetin işi ![]() .
.
İş için SI birimi joule (1j = 1 hm).
Güç.
Güç kuvvetin birim zamanda yaptığı işi belirleyen niceliktir. İş eşit olarak yapılırsa, güç
nerede t - işin yapıldığı süre A. Genel olarak
![]() .
.
Bu nedenle, güç, kuvvetin teğet bileşeninin ürününe ve hareket hızına eşittir.
Sistemdeki güç birimi Sİ dır-dir watt (1 Sal= 1 j/sn). Mühendislikte, 1 beygir gücü genellikle 75'e eşit bir güç birimi olarak alınır. kilogram/sn veya 736 sal.
Bir makinenin yaptığı iş, gücünün ve çalıştığı zamanın çarpımı ile ölçülebilir. Bundan, teknolojide yaygın olarak kullanılan iş ölçü birimi olan kilovat saat ortaya çıktı (1 kWh = 3,6j 367100 kilogram).
Verilen bir güce sahip bir motor için denklemden görülebilir. W, çekiş kuvveti ne kadar büyük olursa, hareket hızı o kadar düşük olur V. Bu nedenle, örneğin, bir yokuşta veya yolun kötü bir bölümünde, araba, tam güçte daha düşük bir hızda hareket etmeyi ve daha fazla çekiş geliştirmeyi sağlayan daha düşük vitesler içerir.
İş hesaplama örnekleri.
Aşağıda ele alınan örnekler, problemlerin çözümünde doğrudan kullanılabilecek sonuçlar vermektedir.
1) Yerçekimi işi. noktayı bırak M, yerçekimi kuvvetinin etki ettiği yer , pozisyondan hareket eder M 0 (x 0 , de 0 , z 0 ) pozisyona M 1 (X 1 , y 1 , z 1 ). Koordinat eksenlerini seçiyoruz, böylece eksen Öz dikey olarak yukarı doğru yönlendirildi (Şekil 19).
Şekil 19
O zamanlar R x=0, R y=0, P z=- R. Bu değerleri yerine koymak ve integrasyon değişkenini dikkate almak z:
Eğer nokta M 0 yukarıda M 1 , nerede h- noktanın dikey hareketinin değeri;
Eğer nokta M 0 noktasının altında M 1 sonra .
Sonunda şunu elde ederiz: ![]() .
.
Sonuç olarak, yerçekimi işi, artı veya eksi işaretiyle alınan kuvvet modülünün ürününe ve uygulama noktasının dikey yer değiştirmesine eşittir. Başlangıç noktası bitiş noktasından yüksekse iş pozitif, başlangıç noktası bitiş noktasından daha düşükse iş negatiftir. Elde edilen sonuçtan, yerçekimi işinin, uygulama noktasının hareket ettiği yörünge tipine bağlı olmadığı çıkar.
Bu özelliğe sahip kuvvetlere potansiyel kuvvetler denir.
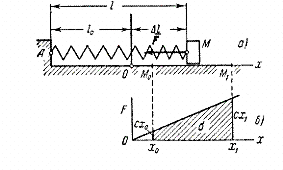
2) Elastik kuvvetin işi. kargoyu düşünün M, yatay bir düzlemde uzanır ve bir yayın serbest ucuna takılır (Şekil 20a). Uçakta nokta ile işaretleyin Ö gerilmeli olmadığında yayın ucunun işgal ettiği konum (gerilmeden yayın uzunluğudur) ve bu noktayı orijin olarak alıyoruz. Şimdi yükü denge konumundan uzaklaştırırsak Ö yayı bir değere uzatırsanız, yüke yayın elastik kuvveti etki eder. F, noktaya yönelik Ö.
Şekil 20
Hooke yasasına göre, bu kuvvetin büyüklüğü yayın uzamasıyla orantılıdır. Bizim durumumuzda beri, o zaman modulo.
katsayı İle birlikte aranan sertlik katsayısı yaylar. Mühendislikte, genellikle ölçülür İle birlikte içinde s/cm, varsayım katsayısı İle birlikte yayı 1 uzatmak için uygulanması gereken kuvvete sayısal olarak eşittir. santimetre.
Yükü bir konumdan başka bir konuma hareket ettirirken elastik kuvvetin yaptığı işi bulunuz. .
Bu durumda beri ![]() , , sonra şunu elde ederiz:
, , sonra şunu elde ederiz:
(Aynı sonuç bağımlılık grafiğinden de elde edilebilir. F itibaren X (şek.20, b)çizimde gölgelenen yamuk alanının hesaplanması ve işin işaretini dikkate alarak.) Ortaya çıkan formülde, yayın ilk uzamasını temsil eder ve yay sonu uzantısı. Sonuç olarak,
![]() ,
,
şunlar. elastik kuvvetin işi, rijitlik katsayısının çarpımının yarısına ve yayın ilk ve son uzamalarının (veya sıkıştırmalarının) kareleri arasındaki farka eşittir.
İş, , yani yayın sonu denge konumuna hareket ettiğinde pozitif ve , yani , olduğunda negatif olacaktır. yayın ucu denge konumundan uzaklaşır. Noktanın yer değiştirmesi durumunda bile formülün geçerli kaldığı kanıtlanabilir. M lineer değildir.
Böylece, kuvvetin işi olduğu ortaya çıkıyor. F sadece değerlere bağlıdır ve nokta yörüngesinin türüne bağlı değildir M. Bu nedenle, elastik kuvvet de potansiyeldir.
Şekil 21
3) Sürtünme kuvvetinin işi. Pürüzlü bir yüzey (Şekil 21) veya bir eğri boyunca hareket eden bir nokta düşünün. Noktaya etkiyen sürtünme kuvveti mutlak değerde eşittir fN, nerede f sürtünme katsayısıdır ve yüzeyin normal tepkisidir. Sürtünme kuvveti, noktanın yer değiştirmesine zıt yöndedir. Sonuç olarak, F tr = - fN ve formüle göre
![]() .
.
Sürtünme kuvveti sabit ise ![]() ,
nerede s-eğri yay uzunluğu M 0 M 1 noktanın hareket ettiği yer.
,
nerede s-eğri yay uzunluğu M 0 M 1 noktanın hareket ettiği yer.
Böylece, Kayma sürtünme kuvvetinin yaptığı iş her zaman negatiftir. Bu işin miktarı arkın uzunluğuna bağlıdır. M 0 M 1 . Bu nedenle, sürtünme kuvveti kuvvettir. potansiyel olmayan.
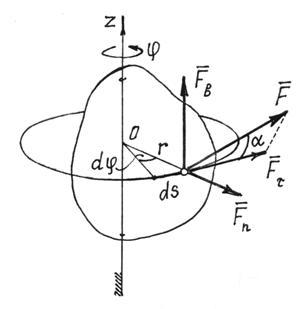
4) Sabit bir eksen etrafında dönen bir cisme uygulanan kuvvetin işi.
Bu durumda (Şekil 22), kuvvet uygulama noktası yarıçaplı bir daire boyunca hareket eder. r. Temel çalışma, (1) ile, ![]() , nerede .
, nerede .
Şekil 22
Bu yüzden ![]() .
.
Gücü üç bileşene ayırarak bunu tespit etmek zor değildir (Şekil 22). (Kuvvetlerin momentleri ve sıfıra eşittir). Anlamına geliyor,
![]() (2)
(2)
Özellikle eksen etrafındaki kuvvet momenti ![]() cisim bir açıyla döndüğünde kuvvetin işi eşittir
cisim bir açıyla döndüğünde kuvvetin işi eşittir
![]() . (3)
. (3)
İşin işareti, kuvvet momentinin ve dönme açısının işaretleri ile belirlenir. Aynı ise, iş olumludur.
Formül (3) ayrıca bir çift kuvvetin işini belirleme kuralını da ifade eder. Eğer bir an ile bir çift m vücudun dönme eksenine dik bir düzlemde bulunur, daha sonra vücut bir açıyla döndüğünde işi
Dönme eksenine dik olmayan bir düzlemde bir çift kuvvet etki ediyorsa, o zaman iki çift ile değiştirilmelidir. Biri eksene dik düzleme, diğeri - eksene paralel düzleme yerleştirilir. Momentleri, moment vektörünün karşılık gelen yönlerde genişlemesiyle belirlenir: . Tabii ki, sadece momenti olan ilk çift işi yapacak, vektör ile dönme ekseni arasındaki açı nerede z,
![]() . (5)
. (5)
Potansiyel enerji
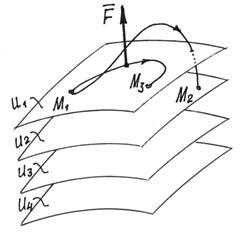
Noktanın konumuna bağlı olarak, oraya yerleştirilen bir maddeye etki eden bir kuvvetin uzayın parçasına kuvvet alanı denir.
Ayrıca, bu kuvvet u = u(x, y, z) kuvvet fonksiyonu kullanılarak belirlenir. Zamana bağlı değilse, böyle bir alana durağan denir. Tüm noktalarda aynı ise, alan homojendir.
Kuvvetin Kartezyen eksenler üzerindeki izdüşümleri, karşılık gelen koordinatlara göre kuvvet fonksiyonunun kısmi türevleri ise
o zaman böyle bir alana potansiyel denir.
kuvvetin işini hesaplayın potansiyel alan bir noktadan bir noktayı hareket ettirirken M 1 pozisyona M 2. (Şek. 23).
Şekil 23
temel çalışma,
Bu, kuvvet fonksiyonunun toplam diferansiyeli.
Son yolculukta çalışmak
![]() (7)
(7)
nerede sen 2 ve sen 1 – noktalarda kuvvet fonksiyonu değerleri M 2 ve M 1 .
Sonuç olarak, potansiyel alan kuvvetinin çalışması, noktanın yörüngesine bağlı değildir, ancak yalnızca noktanın ilk ve son konumlarındaki kuvvet fonksiyonunun değerleri ile belirlenir.
Doğal olarak, nokta başlangıç konumuna dönerse, kuvvetin işi sıfır olacaktır. İş sıfıra eşit olacak ve başka bir noktaya hareket ederken M 3 Eğer kuvvet fonksiyonunun değeri başlangıç pozisyonundaki ile aynı ise.
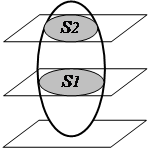
Kuvvet fonksiyonunun aynı değerlerine sahip noktaların bir bütün yüzeyi oluşturacağını tahmin etmek kolaydır. Ve kuvvet alanı, bu tür yüzeylerden oluşan katmanlı bir uzaydır (Şekil 23). Bu yüzeylere denir düz yüzeyler veya eş potansiyel yüzeyler. Denklemleri: sen(x, y, z)= C (C- devamlı, değere eşit sen bu yüzeydeki noktalar). Ve kuvvet fonksiyonu sırasıyla çağrılır, potansiyel alanlar.
Tabii ki, eş potansiyel yüzeyler kesişmez. Aksi takdirde, belirsiz potansiyele sahip alan noktaları olacaktır.
Eşpotansiyelli bir yüzey boyunca bir noktayı hareket ettirirken, kuvvetin işi sıfır olduğundan, kuvvet vektörü yüzeye diktir.
Bu yüzeyler arasından bir tanesini seçip sıfır yüzey diyoruz. sen= sen 0 ).
Nokta belirli bir M noktasından sıfır yüzeyine hareket ettiğinde kuvvetin yapacağı işe, bu özel M noktasındaki noktanın potansiyel enerjisi denir:
![]() . (8)
. (8)
dikkat, ki potansiyel enerji alanın aynı noktasında sıfır yüzey seçimine bağlıdır.
(8) kuvvet fonksiyonu ile . Bu nedenle, (6)'ya göre Kartezyen eksenler üzerindeki kuvvet projeksiyonları,
ve kuvvet vektörü ![]() .
.
Birkaç potansiyel alanı düşünün.
1) Yerçekimi alanı.
Dünya yüzeyinin yakınında, tüm noktalardaki yerçekimi kuvveti, vücudun ağırlığına eşittir. Bu, bu kuvvet alanının homojen olduğu anlamına gelir. Bir nokta yatay düzlemde hareket ettiğinde, kuvvetin işi sıfır olduğundan, eşpotansiyel yüzeyler yatay düzlemler olacaktır (Şekil 24) ve denklemleri: sen = z = C.
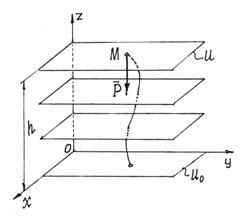
Şekil 24
Düzlem sıfır yüzey olarak atanırsa xOy, sonra konumdaki bir noktanın potansiyel enerjisi M yerçekimi işine eşit olacaktır:
2) Elastik kuvvet alanı.
Yay gibi elastik bir cisim deforme olduğunda bir kuvvet ortaya çıkar. Yani, bu cismin yakınında, kuvvetleri cismin deformasyonu ile orantılı olan ve deforme olmamış duruma yönelik bir kuvvet alanı ortaya çıkar. İlkbaharda - noktaya M 0 , deforme olmamış yayın ucunun bulunduğu yer (Şekil 25).
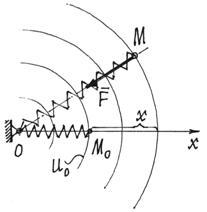
Şekil 25
Yayın ucunu, uzunluğu değişmeyecek şekilde hareket ettirirseniz, elastik kuvvetin işi sıfır olacaktır. Bu, eş potansiyel yüzeylerin O noktasında ortalanmış küresel yüzeyler olduğu anlamına gelir.
Noktadan geçen küreye sıfır yüzeyi atayın M 0 , deforme olmamış yayın sonuna kadar. O halde yayın potansiyel enerjisi konumdaki M: .
Böyle bir sıfır yüzey seçimiyle, potansiyel enerji hem gergin hem de sıkıştırılmış durumda her zaman pozitif (P>0) olacaktır.
Bir noktanın kinetik enerjisindeki değişime ilişkin teorem.
Kütlesi olan bir nokta düşünün t, bir pozisyondan kendisine uygulanan kuvvetlerin etkisi altında hareket etmek M 0 , hızının olduğu yer , pozisyona M 1, hızı nerede.
İstenen bağımlılığı elde etmek için, dinamiğin temel yasasını ifade eden denkleme dönüyoruz. Bu eşitliğin her iki parçasını noktanın yörüngesine teğet üzerine yansıtmak M, hareket yönünde yönlendirilirsek, şunu elde ederiz:
Soldaki teğetsel ivmenin değeri şu şekilde gösterilebilir:
![]() .
.
Sonuç olarak, sahip olacağız:
![]() .
.
Bu denklemin her iki tarafını ile çarparak ds, tanıtacağız t diferansiyel işaretinin altında. Sonra nerede olduğunu fark ederek - temel kuvvet işi F k kinetik enerjideki değişime ilişkin teoremin diferansiyel formdaki ifadesini elde ederiz.
Yerçekimi işi. Yerçekimi R malzeme noktası kütlesi t Dünya yüzeyine yakın bir sabit olarak kabul edilebilir, eşit mg
dikey olarak aşağı yönlendirilir.
İş ANCAK kuvvet R noktadan hareket halinde M 0 diyeceğim şey şu ki M
nerede h = z 0 - z x - nokta alçaltma yüksekliği.
Yerçekimi işi, bu kuvvetin ürününe ve indirme yüksekliğine (iş pozitif) veya kaldırma yüksekliğine (iş negatif) eşittir. Yerçekimi işi, noktalar arasındaki yörüngenin şekline bağlı değildir. M 0 ve M| ve bu noktalar çakışırsa, yerçekimi işi sıfıra eşittir (kapalı bir yol durumu). noktaları ise sıfıra eşittir. M 0 ve M aynı yatay düzlemde uzanır.
Lineer elastikiyet kuvvetinin işi. Lineer elastik kuvvet (veya lineer geri yükleme kuvveti), Hooke yasasına göre hareket eden kuvvettir (Şekil 63):
F = - İle birlikter,
nerede r- kuvvetin sıfır olduğu statik denge noktasından düşünülen noktaya olan mesafe M; İle birlikte- devamlı katsayı - katsayı sertlik.
A=--().
Bu formüle göre lineer elastik kuvvetin işi hesaplanır. Eğer nokta M 0 bir nokta ile çakışıyor statik denge Ö, e sonra r 0 \u003d 0 ve kuvvetin noktadan yer değiştirme üzerindeki işi için Ö diyeceğim şey şu ki M sahibiz
Değer r- dikkate alınan nokta ile statik denge noktası arasındaki en kısa mesafe. Bunu λ ile gösteriyoruz ve buna deformasyon diyoruz. O zamanlar
Lineer elastik kuvvetin statik denge durumundan yer değiştirme üzerindeki işi her zaman negatiftir ve rijitlik katsayısının ve deformasyonun karesinin çarpımının yarısına eşittir. Lineer elastik kuvvetin işi yer değiştirmenin şekline bağlı değildir ve herhangi bir kapalı yer değiştirme üzerindeki iş sıfırdır. noktaları ise sıfıra eşittir. ay ve M statik denge noktasından sınırlandırılmış aynı küre üzerinde uzanır.
Eğrisel harekette değişken bir kuvvetin işi.
Eğri bir kesit üzerinde bir kuvvetin işi
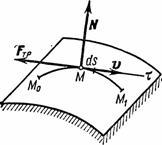
Uygulama noktası eğrisel bir yörünge boyunca hareket eden değişken bir kuvvetin işini bulma genel durumunu düşünün. Değişken F kuvvetinin uygulandığı M noktasının keyfi bir sürekli eğri boyunca hareket etmesine izin verin. M noktasının sonsuz küçük yer değiştirmesi vektörü ile gösterilir. Bu vektör, hız vektörü ile aynı yönde eğriye teğetsel olarak yönlendirilir.
Değişken F kuvvetinin sonsuz küçük yer değiştirme üzerindeki temel işi
ds F vektörlerinin skaler çarpımı olarak adlandırılır ve ds:
nerede a- vektörler F arasındaki açı ve ds
Yani, kuvvetin temel işi, kuvvet vektörlerinin modüllerinin çarpımına ve bu vektörler arasındaki açının kosinüsü ile çarpılan sonsuz küçük bir yer değiştirmeye eşittir.
F kuvvet vektörünü iki bileşene ayırıyoruz: - yörüngeye teğet boyunca yönlendirilir - ve - normal boyunca yönlendirilir. kuvvet hattı
noktanın hareket ettiği yola teğete diktir ve işi sıfırdır. O zamanlar:
dA= Ftds.
Eğrinin son bölümünde F değişken kuvvetinin işini hesaplamak için a b'ye göre, temel işin integrali hesaplanmalıdır:
Potansiyel ve kinetik enerji.
Potansiyel enerji P matdikkate alınan seri noktabenim amacım kuvvet alanı M çağrı çalışması, kuvvetleri tarafından gerçekleştirilenla bir noktadan hareket ettirirken maddi bir noktaya etki edenMbaşlangıç noktasınaM 0 , yani
P = umm 0
P = =-sen=- sen
Sabit С 0, alanın hangi noktasının ilk olarak seçildiğine bağlı olarak, alanın tüm noktaları için aynıdır. Potansiyel enerjinin yalnızca, işin noktalar arasındaki hareket biçimine bağlı olmadığı potansiyel bir kuvvet alanı için verilebileceği açıktır. M ve M 0 . Potansiyel olmayan bir kuvvet alanının potansiyel enerjisi yoktur ve bunun için bir kuvvet fonksiyonu yoktur.
dA = dU= -dP; ANCAK = sen - sen 0 = P 0 - P
Yukarıdaki formüllerden, P başlangıç noktasının seçimine bağlı olan keyfi bir sabite kadar belirlenir, ancak bu keyfi sabit, potansiyel enerji aracılığıyla hesaplanan kuvvetleri ve bu kuvvetlerin işini etkilemez. Bunu göz önünde bulundurarak:
P= - sen+ const veya P =- sen.
Alanın herhangi bir noktasındaki potansiyel enerji, keyfi bir sabite kadar, eksi işareti ile alınan aynı noktadaki kuvvet fonksiyonunun değeri olarak tanımlanabilir.
Kinetik enerji sisteme, sistemin tüm noktalarının kinetik enerjilerinin toplamına eşit bir skaler değer T denir:
Kinetik enerji, sistemin hem öteleme hem de dönme hareketlerinin bir özelliğidir. Kinetik enerji, skaler bir niceliktir ve dahası, esasen pozitiftir. Bu nedenle, sistem parçalarının hareket yönlerine bağlı değildir ve bu yönlerdeki değişiklikleri karakterize etmez.
Şu önemli duruma da dikkat edelim. İç kuvvetler sistemin parçalarına karşılıklı olarak zıt yönlerde etki eder. Kinetik enerjideki değişiklikler hem dış hem de iç kuvvetlerin etkisinden etkilenir.
Bir noktanın düzgün hareketi.
Bir noktanın düzgün hareketi- Hareket, Krom kasat ile. ivme ω t noktası (doğrusal hareket durumunda, toplam ivme ω )sürekli. Bir noktanın düzgün hareket yasası ve hızındaki değişim yasası υ bu hareket sırasında eşitlikler tarafından verilir:
s, yörünge üzerinde seçilen referans noktasından yörünge yayı boyunca ölçülen noktanın mesafesidir, t- zaman, s 0 - başlangıçtaki s değeri. zaman anı t = = 0. - beg. nokta hızı. İşaretler ne zaman υ ve ω özdeş, tek biçimli hareket. hızlandırılır ve farklı olduğunda - yavaşlar.
Oyunculuk yaparken. katı bir cismin düzgün hareketi, yukarıdakilerin tümü cismin her noktası için geçerlidir; sabit bir açı ekseni etrafında düzgün dönüş ile. cismin ivmesi e sabittir ve dönme kanunu ve açı değişimi kanunu. cismin hızları ω eşitliklerle verilir
burada φ cismin dönme açısıdır, φ 0 başlangıçtaki φ değeridir. zamanın anı t= 0, ω 0 - yalvarırım. ang. vücut hızı. ω ve ε işaretleri eşleştiğinde dönüş hızlanır, eşleşmediğinde ise yavaşlar.
Doğrusal harekette sabit bir kuvvetin işi.
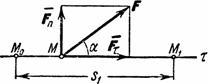
Etki eden kuvvetin büyüklük ve yönde sabit olduğu ve uygulama noktasının doğrusal bir yörünge boyunca hareket ettiği durum için işi tanımlayalım. Değer ve yönde sabit bir kuvvetin uygulandığı bir malzeme noktası C düşünün (Şekil 134, a).
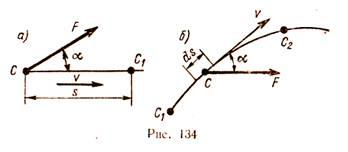
Belirli bir t süresi boyunca, C noktası, s mesafesinde doğrusal bir yörünge boyunca C1 konumuna hareket etti.
Uygulandığı noktanın doğrusal hareketi sırasında sabit bir kuvvetin işi W, kuvvet modülü F çarpı s mesafesi ve kuvvetin yönü ile hareket yönü arasındaki açının kosinüsünün çarpımına eşittir, yani.
Kuvvet yönü ile hareket yönü arasındaki α açısı 0 ila 180° arasında değişebilir. α için< 90° работа положительна, при α >90° negatiftir, α = 90°'de iş sıfırdır.
Kuvvet hareket yönü ile dar açı yapıyorsa buna itici kuvvet denir, kuvvetin işi her zaman pozitiftir. Kuvvetin yönü ile hareket arasındaki açı geniş ise, kuvvet harekete direnir, negatif iş yapar ve direnç kuvveti olarak adlandırılır. Direnç kuvvetlerinin örnekleri, her zaman harekete zıt yönde yönlendirilen kesme, sürtünme, hava direnci ve diğerleridir.
α = 0° olduğunda, yani kuvvetin yönü hızın yönü ile çakıştığında, o zaman W = F s, çünkü cos 0° = 1 olur. F cos α, kuvvetin yönüne izdüşümüdür. malzeme noktasının hareketi. Bu nedenle, bir kuvvetin işi, yer değiştirmenin s ve kuvvetin izdüşümü ve noktanın hareket yönünün ürünü olarak tanımlanabilir.
33. Sert bir cismin atalet kuvvetleri
Klasik mekanikte, kuvvetlerin temsilleri ve özellikleri Newton yasalarına dayanır ve eylemsiz referans çerçevesi kavramıyla ayrılmaz bir şekilde bağlantılıdır.
Gerçekten de, kuvvet denilen fiziksel nicelik Newton'un ikinci yasası tarafından dikkate alınırken, yasanın kendisi yalnızca aşağıdakiler için formüle edilmiştir. atalet sistemleri referans. Buna göre, kuvvet kavramının başlangıçta sadece bu tür referans çerçeveleri için tanımlandığı ortaya çıkıyor.
Bir maddesel noktanın ivmesini ve kütlesini, üzerine etki eden kuvvet ile ilişkilendiren Newton'un ikinci yasasının denklemi şu şekilde yazılır:
Doğrudan denklemden, yalnızca kuvvetlerin cisimlerin ivmelenmesinin nedeni olduğu ve bunun tersi olduğu sonucuna varılır: dengelenmemiş kuvvetlerin bir cisim üzerindeki etkisi, zorunlu olarak ivmesine neden olur.
Newton'un üçüncü yasası, ikinci yasadaki kuvvetler hakkında söylenenleri tamamlar ve geliştirir.
kuvvet, diğer cisimlerin belirli bir malzeme gövdesi üzerindeki mekanik hareketin bir ölçüsüdür.
Newton'un üçüncü yasasına göre, kuvvetler sadece çiftler halinde var olabilir ve bu tür her bir çiftteki kuvvetlerin doğası aynıdır.
bir cisme etki eden herhangi bir kuvvetin başka bir cisim şeklinde bir menşe kaynağı vardır. Başka bir deyişle, kuvvetler zorunlu olarak sonuçtur. etkileşimler tel.
Mekanikte başka hiçbir kuvvet dikkate alınmaz veya kullanılmaz. Etkileşen cisimler olmadan bağımsız olarak ortaya çıkan kuvvetlerin var olma olasılığına mekanik tarafından izin verilmez.
Euler ve d'Alembert atalet kuvvetlerinin adları kuvvet, bu fiziksel nicelikler mekanikte kabul edilen anlamda kuvvetler değildir.
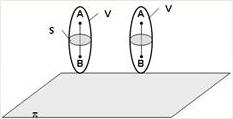
34. Katı bir cismin düzlem-paralel hareketi kavramı
Katı bir cismin hareketine, cismin tüm noktaları sabit bir düzleme (ana düzlem) paralel düzlemlerde hareket ederse düzlem-paralel denir. Bazı V cismi bir düzlem hareketi yapsın, π - ana düzlem. Düzlem-paralel hareketin tanımından ve kesinlikle katı bir cismin özelliklerinden, π düzlemine dik olan herhangi bir AB doğru parçasının ileri hareket. Yani AB segmentinin tüm noktalarının yörüngeleri, hızları ve ivmeleri aynı olacaktır. Böylece, s kesitinin π düzlemine paralel her bir noktasının hareketi, V cismin bu noktada kesite dik doğru parçası üzerinde bulunan tüm noktalarının hareketini belirler. Düzlem-paralel hareket örnekleri şunlardır: düz bir parça boyunca yuvarlanan tekerlek, tüm noktaları tekerlek eksenine dik düzleme paralel düzlemlerde hareket ettiğinden; Böyle bir hareketin özel bir durumu, katı bir cismin sabit bir eksen etrafında dönmesidir, aslında, dönen bir cismin tüm noktaları, dönme eksenine dik bazı sabit düzlemlere paralel düzlemlerde hareket eder.
35. Maddi bir noktanın doğrusal ve eğrisel hareketindeki atalet kuvvetleri
Bir noktanın hareket halindeki bir değişikliğe direndiği kuvvete, maddesel bir noktanın eylemsizlik kuvveti denir. Eylemsizlik kuvveti, noktanın ivmesine zıt yöndedir ve kütle çarpı ivmeye eşittir.
Düz bir çizgide ivme yönü yörünge ile çakışıyor. Atalet kuvveti, ivmenin tersi yönde yönlendirilir ve sayısal değeri aşağıdaki formülle belirlenir:
Hızlandırılmış hareket ile ivme ve hız yönleri çakışır ve atalet kuvveti harekete zıt yönde yönlendirilir. Ağır çekimde, ivme hızın tersi yönde yönlendirildiğinde, atalet kuvveti hareket yönünde etki eder.
saateğrisel ve düzensizhareket ivme normale ayrıştırılabilir bir ve teğet de bileşenler. Benzer şekilde, bir noktanın eylemsizlik kuvveti de iki bileşenden oluşur: normal ve teğet.
Normal atalet kuvvetinin bileşeni, noktanın kütlesi ile normal ivmenin çarpımına eşittir ve bu ivmeye zıt yönlüdür:
![]()
Teğet atalet kuvvetinin bileşeni, noktanın kütlesi ile teğetsel ivmenin çarpımına eşittir ve bu ivmenin karşısına yönlendirilir:
bariz ki tam güç eylemsizlik noktası M normal ve teğet bileşenlerin geometrik toplamına eşittir, yani.
![]()
Teğetsel ve normal bileşenlerin birbirine dik olduğu göz önüne alındığında, toplam eylemsizlik kuvveti:
36. Karmaşık hareketteki bir noktanın hızlarının ve ivmelerinin eklenmesine ilişkin teoremler
Hız toplama teoremi:
Mekanikte, bir noktanın mutlak hızı, göreli ve öteleme hızlarının vektör toplamına eşittir:
Cismin sabit referans çerçevesine göre hızı, bu cismin hareketli referans çerçevesine göre hızının vektör toplamına ve hareketli çerçevenin bulunduğu noktanın hızının (sabit çerçeveye göre) hızına eşittir. gövde yer almaktadır.
karmaşık bir harekette, bir noktanın mutlak hızı, öteleme ve bağıl hızların geometrik toplamına eşittir. Mutlak hızın büyüklüğü nerede belirlenir α
vektörler arasındaki açıdır  ve
ve  .
.
İvme toplama teoremi ( CORIOLIS TEOREMİ)
akor = aper + afrom + akor
Formül, hızlandırılmış ilave üzerine aşağıdaki Coriolis teoremini ifade eder:
renyum: 1 karmaşık hareket için, bir noktanın ivmesi geometrik
üç ivmenin toplamı: bağıl, öteleme ve döner veya
Coriolis.
akor = 2(ω × oy)
37. d'Alembert ilkesi
Maddi bir nokta için d'Alembert ilkesi: Maddi bir noktanın hareketinin her anında, aktif kuvvetler, bağların tepkileri ve atalet kuvveti dengeli bir kuvvetler sistemi oluşturur.
d'Alembert ilkesi- mekanikte: dinamiğin temel ilkelerinden biri, buna göre, mekanik sistemin noktalarına etki eden verilen kuvvetlere atalet kuvvetleri eklenirse ve üst üste binen bağların tepkileri, o zaman dengeli bir kuvvetler sistemi olacaktır. elde edilmek.
Bu ilkeye göre, sistemin her i. noktası için eşitlik
bu noktaya etki eden aktif kuvvet nerede, noktaya uygulanan bağlantının tepkisidir, atalet kuvvetidir, sayısal olarak noktanın kütlesinin ürününe ve ivmesine eşittir ve bu ivmenin tersine yönlendirilir ().
Aslında Newton'un ikinci yasasında () ma teriminin sağdan sola aktarılmasından ve bu terimin d'Alembert atalet kuvveti tarafından sansürlenmesinden bahsediyoruz.
D'Alembert ilkesi, dinamik problemlerini çözmek için daha basit statik yöntemlerin uygulanmasını mümkün kılar, bu nedenle sözde mühendislik uygulamalarında yaygın olarak kullanılır. kinetostatik yöntem. Devam eden hareket yasasının bilindiği veya karşılık gelen denklemlerin çözümünden bulunduğu durumlarda kısıtlamaların tepkilerini belirlemek için kullanmak özellikle uygundur.
Mekaniğin en önemli kavramlarından biri iş gücü .
Zorla çalışma
![]()
Herşey fiziksel bedenlerçevremizdeki dünyada zorla harekete geçirilir. Aynı veya zıt yönde hareket eden bir cisim, bir veya daha fazla cisimden gelen bir kuvvet veya birkaç kuvvetten etkileniyorsa, derler ki: iş bitti .
Yani mekanik iş cisme etki eden kuvvet tarafından yapılır. Böylece, bir elektrikli lokomotifin çekiş gücü tüm treni harekete geçirir ve böylece mekanik iş. Bisiklet, bisikletçinin bacaklarının kas gücüyle hareket eder. Bu nedenle, bu kuvvet aynı zamanda mekanik iş yapar.
fizikte kuvvet işi aranan fiziksel miktar, kuvvet modülünün ürününe eşittir, kuvvetin uygulama noktasının yer değiştirme modülü ve kuvvet ve yer değiştirme vektörleri arasındaki açının kosinüsü.
A = F s cos (F, s) ,
nerede F kuvvet modülü,
s- hareket modülü .
Kuvvet rüzgarları ile yer değiştirme arasındaki açı sıfıra eşit değilse, her zaman iş yapılır. Kuvvet, hareket yönünün tersi yönde etki ederse, iş miktarı negatiftir.
Vücuda hiçbir kuvvet etki etmiyorsa veya uygulanan kuvvet ile hareket yönü arasındaki açı 90 o ise (cos 90 o \u003d 0) iş yapılmaz.
At arabayı çekerse, atın kas kuvveti veya arabaya doğru yönlendirilen çekiş kuvveti işi yapar. Ve sürücünün arabaya bastığı yerçekimi kuvveti, hareket yönüne dik olarak aşağıya doğru yönlendirildiği için hiçbir işe yaramaz.
Bir kuvvetin işi skaler bir büyüklüktür.
SI iş birimi - joule. 1 joule, kuvvetin yönü ile yer değiştirmenin aynı olması durumunda 1 m mesafede 1 newtonluk bir kuvvetin yaptığı iştir.
Bir cisme veya maddesel bir noktaya birden fazla kuvvet etki ediyorsa, bu kuvvetler bileşke kuvvetlerinin yaptığı işten bahsederler.
Uygulanan kuvvet sabit değilse, işi bir integral olarak hesaplanır:
![]()
Güç

Vücudu harekete geçiren kuvvet mekanik iş yapar. Ancak bu işin nasıl yapıldığını, hızlı veya yavaş, bazen pratikte bilmek çok önemlidir. Aynı iş için yapılabilir farklı zaman. Büyük bir elektrik motorunun yaptığı iş, küçük bir motor tarafından yapılabilir. Ama bunu yapması çok daha uzun sürecek.
Mekanikte, işin hızını karakterize eden bir nicelik vardır. Bu değer denir güç.
Güç, belirli bir süre içinde yapılan işin bu sürenin değerine oranıdır.
N= bir / ∆ t
Tanım olarak bir = F s çünkü α , a s/∆ t = v , Sonuç olarak
N= F v çünkü α = F v ,
nerede F - kuvvet, v hız, α kuvvetin yönü ile hızın yönü arasındaki açıdır.
Yani güç - kuvvet vektörü ile cismin hız vektörünün skaler çarpımıdır.
AT uluslararası sistem SI gücü watt (W) cinsinden ölçülür.
1 watt'ın gücü, 1 saniyede (s) yapılan 1 joule (J) 'nin işidir.
İşi yapan kuvvet veya bu işin yapılma hızı artırılarak güç arttırılabilir.





