Mekanik iş kinetik potansiyel enerjidir. Vücutların ve sistemlerin toplam mekanik enerjisi
Tamamlamak mekanik enerji sistemler - mekanik hareket ve etkileşimin enerjisi:
Yani kinetik ve potansiyel enerjilerin toplamına eşittir. Toplam mekanik enerji: - cisimlerin hareketini ve etkileşimini karakterize eder; ve - hızların bir fonksiyonudur ve göreceli konum tel. Toplam mekanik enerjideki değişim, tüm dış kuvvetlerin ve potansiyel olmayan iç kuvvetlerin toplam işine eşittir. Açıkçası, toplam mekanik enerji kapalı sistem, içinde sadece potansiyel kuvvetler, cisimlerin herhangi bir hareketi ile değişmez. Bu ifadeye mekanik enerjinin korunumu yasası denir.
Kuvvet bağı cisme ve potansiyel enerjisine etki eder. Muhafazakar bir F kuvvetinin etkisi altında cismin X ekseni boyunca dX kadar hareket etmesine izin verin, bu kuvvetin işi şu şekilde yazılır: dA=Fxdx, Fxdx=-dEпàFx==∂Еп/∂x, Fx=∂Еп /∂Z. F=gradEp.
13. Kuvvet momenti ve dürtü momenti.
Sabit bir noktaya göre F kuvvetinin momenti Ö aranan fiziksel miktar, tanımlı vektör ürün noktasından çizilen yarıçap-vektör r Ö kesinlikle ANCAK kuvvet uygulanması, kuvvet F (Şekil 25): Burada M - yalancı vektör, onun yönü aynıdır ileri hareket r'den F'ye dönüşü sırasında sağ vidanın değeri. a'nın r ile F arasındaki açı olduğu kuvvet momentinin (18.1) modülü; r sinüs = ben- kuvvetin etki çizgisi ile nokta arasındaki en kısa mesafe Ö - omuz gücü.
Sabit eksene göre kuvvet momenti z aranan skaler büyüklük m z , keyfi bir noktaya göre tanımlanan kuvvet momentinin M vektörünün bu ekseni üzerindeki izdüşümüne eşit Ö verilen z ekseni (Şekil 26). Tork değeri Mz nokta konumu seçimine bağlı değildir Ö z ekseni üzerinde.
Z ekseni M vektörünün yönü ile çakışıyorsa, kuvvet momenti eksenle çakışan bir vektör olarak temsil edilir: Cismin dönüşü sırasında yapılan iş için bir ifade bulalım (Şekil 27). noktasına F kuvveti uygulansın. AT, eksenden uzak z mesafede r, a - kuvvet yönü ve yarıçap vektörü r arasındaki açı. Cisim kesinlikle rijit olduğundan, bu kuvvetin işi, tüm cismi döndürmek için harcanan işe eşittir. Vücut sonsuz küçük bir dj açısıyla döndüğünde, uygulama noktası AT d yolunu geçer s=r dj ve iş, yer değiştirmenin büyüklüğü ile yer değiştirme yönündeki kuvvetin izdüşümünün ürününe eşittir: ![]() (18.1)'i dikkate alarak, nereye yazabiliriz Cum günah = Fl =Mz - z ekseni etrafındaki kuvvet momenti.
(18.1)'i dikkate alarak, nereye yazabiliriz Cum günah = Fl =Mz - z ekseni etrafındaki kuvvet momenti. ![]()
Açısal moment (momentum) maddi nokta ANCAK sabit bir noktaya göre Ö vektör ürünü tarafından belirlenen fiziksel miktardır: burada r, O noktasından noktaya çizilen yarıçap vektörüdür A, p =m v - maddi bir noktanın momentumu (Şekil 28); L- yalancı vektör, yönü, r'den p'ye döndüğünde sağ vidanın öteleme hareketinin yönü ile çakışmaktadır. Açısal momentum vektörünün modülü burada bir - r ve p vektörleri arasındaki açı, ben- noktaya göre p vektörünün omzu Ö.
14. Birkaç kuvvet ve torku.
KUVVET ÇİFTLERİ - ikisi eşit büyüklükte ve zıt yönde paralel kuvvetler bir bedene bağlı. Bir çift kuvvetin bir sonucu yoktur. Bir kuvvet çiftini oluşturan kuvvetlerin etki çizgileri arasındaki en kısa mesafeye çiftin omzu denir. Bir vücut üzerindeki bir çift kuvvetin hareketi, bir çift kuvvetin momenti ile karakterize edilir - omuzdaki kuvvetlerden birinin ürünü. Çiftin torkunu hesaplayın: M=M1+M2=│r1F1│-│r2F2│=│r1-r2▪F1│=│r21F1│.Tork modülü par. Etkileşen herhangi 2 nokta için, noktaların etkileştiği bir çift kuvvetin momenti her zaman = 0'dır, çünkü h = 0'dır.
Mekanik bir sistemin açısal momentumundaki değişime ilişkin teorem. Mekanik bir sistemin açısal momentumuna denir. vektör toplamı L sistemdeki tüm parçacıkların açısal momentumudur. L=∑Li=∑. dL/dt=d/dt ∑'nin türevini alalım ve sonuç olarak dL/dt=Mext'i elde edelim. Kapalı bir sistemde, dış kuvvetlerin momenti (19.4)
İfade (19.4), açısal momentumun korunumu yasasıdır: kapalı bir sistemin açısal momentumu korunur, yani. zamanla değişmez. Açısal momentumun korunumu yasası - doğanın temel yasası. Uzayın simetri özelliği ile bağlantılıdır - onun izotropi, yani, referans sisteminin koordinat eksenlerinin yönünün seçimine göre (uzayda kapalı bir sistemin herhangi bir açıyla dönüşüne göre) fiziksel yasaların değişmezliği ile.
15. Maddi bir noktanın eylemsizlik momenti, sistem ve sağlam vücut .
Bir sistemin (gövdenin) belirli bir eksen etrafındaki atalet momenti, fiziksel bir niceliktir. toplam sistemin malzeme noktalarının kütlelerinin ürünleri, dikkate alınan eksene olan uzaklıklarının kareleri ile: sürekli dağıtım kütle, bu toplam, entegrasyonun vücudun tüm hacmi üzerinde gerçekleştirildiği bir integrale indirgenir. Değer r bu durumda koordinatları olan bir nokta konumu fonksiyonu vardır. x, y, z.
Örnek olarak, yüksekliği olan homojen bir katı silindirin atalet momentini bulalım. h ve yarıçap R geometrik eksenine göre (Şekil 23). Silindiri sonsuz küçük kalınlıkta d ayrı içi boş eşmerkezli silindirlere bölelim. r iç yarıçaplı r ve harici r+d r. Her bir içi boş silindirin eylemsizlik momenti d J=r 2 boyutlu m(çünkü d r<![]() ama o zamandan beri pr 2 h- silindirin hacmi, sonra kütlesi m=pR 2 saat, ve eylemsizlik momenti
ama o zamandan beri pr 2 h- silindirin hacmi, sonra kütlesi m=pR 2 saat, ve eylemsizlik momenti
16. Stern teoremi.
Bir cismin kütle merkezinden geçen bir eksene göre eylemsizlik momenti biliniyorsa, herhangi bir paralel eksene göre eylemsizlik momenti Steiner teoremi ile belirlenir. : vücudun eylemsizlik momenti J keyfi bir eksene göre eylemsizlik momentine eşittir Jc kütle merkezinden geçen paralel bir eksene göre İTİBAREN kütlenin ürününe eklenen vücut t kare mesafe başına vücut a akslar arasında:
17. Dinamik denklemi döner hareket sağlam vücut.
Iε = M. Bu, katı bir cismin dönme hareketinin dinamiğinin temel denklemidir. Bu denklemdeki açısal ivme ε ve tork M cebirsel büyüklüklerdir. Genellikle pozitif dönüş yönü saat yönünün tersidir.
Miktarların dönme ekseni boyunca yönlendirilmiş vektörler olarak tanımlandığı, dönme hareketi dinamiğinin temel denkleminin bir vektör formu da mümkündür. Cisimlerin öteleme hareketini incelerken, vücut momentumu kavramı tanıtılır. Benzer şekilde, dönme hareketi incelenirken açısal momentum kavramı tanıtılır. Dönen bir cismin açısal momentumu, cismin atalet momentinin ürününe eşit fiziksel bir nicelik olarak adlandırılır ve dönme açısal hızı ω. Açısal momentum L harfi ile gösterilir: Tüm cismin açısal momentumu Li'nin vektör toplamı olarak tanımlanır. L = ben. ![]() Burada I = const durumu için elde edilen bu denklem, hareket sırasında cismin atalet momentinin değiştiği genel durumda da geçerlidir.
Burada I = const durumu için elde edilen bu denklem, hareket sırasında cismin atalet momentinin değiştiği genel durumda da geçerlidir.
18. Dönen bir cismin kinetik enerjisi.
İçinden geçen sabit bir z ekseni etrafında dönen tamamen katı bir cisim (bakınız § 1) düşünün (Şekil 24). Bu bedeni zihinsel olarak temel kütlelerle küçük hacimlere bölelim t 1 , t 2 ,..., tn , uzaktan r 1 , r 2 ,..., rn eksenden.
Katı bir cisim sabit bir eksen etrafında döndüğünde, kütleleri olan bireysel temel hacimleri bençeşitli yarıçaplı daireleri tanımlayın ri, ve farklı doğrusal hızlara sahip v ben. Ancak kesinlikle katı bir cisim düşündüğümüz için, bu hacimlerin açısal dönme hızı aynıdır: (17.1) Dönen bir cismin kinetik enerjisini, temel hacimlerinin kinetik enerjilerinin toplamı olarak buluruz:
![]() veya (17.1) ifadesini kullanarak şunu elde ederiz:
veya (17.1) ifadesini kullanarak şunu elde ederiz:
![]() nerede Jz- cismin z eksenine göre eylemsizlik momenti. Böylece, kinetik enerji dönen gövde (17.2)
nerede Jz- cismin z eksenine göre eylemsizlik momenti. Böylece, kinetik enerji dönen gövde (17.2)
İlerleyen bir cismin kinetik enerjisi için formül (17.2)'nin (12.1) ifadesi ile karşılaştırılmasından (T=mv 2 /2),
Buna göre eylemsizlik momenti vücut atalet ölçüsü dönme hareketi sırasında. Formül (17.2), sabit bir eksen etrafında dönen bir gövde için geçerlidir. Bir cismin düzlemsel hareketi durumunda, örneğin, eğimli bir düzlemde kaymadan yuvarlanan bir silindirde, hareket enerjisi, öteleme hareketinin enerjisi ile dönme enerjisinin toplamıdır: ![]() nerede m- yuvarlanan gövdenin kütlesi; vc- vücudun kütle merkezinin hızı; Jc- cismin kütle merkezinden geçen eksen etrafındaki eylemsizlik momenti; w cismin açısal hızıdır. Cismin dönüşü üzerindeki dış kuvvetin işi F=Fi+Fr+Fk. Dönen bir cismin kuvvetinin işi A=M* ∆φ
nerede m- yuvarlanan gövdenin kütlesi; vc- vücudun kütle merkezinin hızı; Jc- cismin kütle merkezinden geçen eksen etrafındaki eylemsizlik momenti; w cismin açısal hızıdır. Cismin dönüşü üzerindeki dış kuvvetin işi F=Fi+Fr+Fk. Dönen bir cismin kuvvetinin işi A=M* ∆φ
19. Yerçekimi alanı.
Vücutlar arasındaki yerçekimi etkileşimi, yerçekimi alanı veya yerçekimi alanı yardımıyla gerçekleştirilir. Bu alan cisimler tarafından üretilir ve maddenin varoluş biçimidir. Yerçekimi alanının temel özelliği, herhangi bir kütle kütlesi için t, bu alana getirildiğinde, yerçekimi kuvveti etki eder, yani (24.1)
g vektörü m'ye bağlı değildir ve buna yerçekimi alanının gücü denir. Yerçekimi alanının yoğunluğu, alanın yanından birim kütlenin maddi noktasına etki eden kuvvet tarafından belirlenir ve etki eden kuvvetle aynı doğrultudadır. gerginlik var güç karakteristiği yerçekimi alanları. Yerçekimi alanı, yoğunluğu tüm noktalarda aynıysa homojen ve alanın tüm noktalarında yoğunluk vektörleri bir noktada kesişen düz çizgiler boyunca yönlendiriliyorsa merkezi olarak adlandırılır. (A) hareketsiz herhangi bir eylemsiz referans çerçevesine göre (Şekil 38). Kuvvet alanının grafiksel gösterimi için kullanılır kuvvet çizgileri (gerilim çizgileri). Alan çizgileri, alan şiddeti vektörü alan çizgisine teğet olarak yönlendirilecek şekilde seçilir.
değer enerji karakteristiği yerçekimi alanına potansiyel denir. yerçekimi alanı potansiyeli j- alanın belirli bir noktasında birim kütleli bir cismin potansiyel enerjisiyle veya alanın belirli bir noktasından sonsuza kadar birim kütleyi hareket ettirme işiyle belirlenen skaler bir miktar. Böylece, bir kütle kütlesi tarafından yaratılan yerçekimi alanının potansiyeli M, eşittir (25.4) burada R- bu gövdeden söz konusu noktaya olan mesafe. (25.4) formülünden, aynı potansiyele sahip noktaların yerinin küresel bir yüzey oluşturduğu sonucu çıkar ( R= sabit). Potansiyeli sabit olan bu tür yüzeylere eş potansiyel denir. Potansiyel arasındaki ilişkiyi düşünün ( j) yerçekimi alanı ve yoğunluğu (g).(25.1) ve (25.4) ifadelerinden, temel iş d A, kütleli bir cismin küçük bir yer değiştirmesi ile alan kuvvetleri tarafından gerçekleştirilir t, eşittir
20. Sıvılarda ve gazlarda basınç. Pascal ve Arşimet Kanunları.
Basınç birimi - paskalya(Pa): 1 Pa, 1 m 2 (1 Pa \u003d 1 N / m 2) alana sahip, kendisine normal bir yüzey üzerinde eşit olarak dağılmış 1 N'lik bir kuvvet tarafından oluşturulan basınca eşittir.
Sıvıların (gazların) dengedeki basıncı Pascal yasasına uyar: Durgun bir sıvının herhangi bir yerindeki basınç her yönde aynıdır ve basınç, durgun sıvının kapladığı hacim boyunca eşit olarak iletilir. Bir akışkanın ağırlığının, durgun haldeki sıkıştırılamaz bir akışkan içindeki basınç dağılımını nasıl etkilediğini düşünelim. Bir sıvı dengedeyken yatay basınç her zaman aynıdır, aksi takdirde denge olmaz. Bu nedenle, durgun bir sıvının serbest yüzeyi her zaman kabın duvarlarından uzakta yataydır. Bir akışkan sıkıştırılamazsa, yoğunluğu basınçtan bağımsızdır. Daha sonra kesit için S sıvı sütun, yüksekliği h ve yoğunluk r ağırlık P=rgSh, ve alt tabandaki basınç
![]() (28.1) yani basınç yükseklikle doğrusal olarak değişir. Baskı yapmak sağ hidrostatik basınç denir. Formül (28.1)'e göre, sıvının alt katmanlarındaki basınç kuvveti, üsttekilerden daha büyük olacaktır, bu nedenle, Arşimet yasası tarafından belirlenen bir kuvvet, bir sıvıya (gaza) daldırılmış bir cisme etki eder: yönlendirilmiş bir kuvvet, bir sıvıya (gaz) daldırılmış bir cisme etki eder, yukarı doğru kaldırma kuvveti, cisim tarafından yer değiştiren sıvının (gaz) ağırlığına eşittir: F ANCAK =PgV, nerede R - sıvı yoğunluğu, V- bir sıvıya batırılmış bir cismin hacmi.
(28.1) yani basınç yükseklikle doğrusal olarak değişir. Baskı yapmak sağ hidrostatik basınç denir. Formül (28.1)'e göre, sıvının alt katmanlarındaki basınç kuvveti, üsttekilerden daha büyük olacaktır, bu nedenle, Arşimet yasası tarafından belirlenen bir kuvvet, bir sıvıya (gaza) daldırılmış bir cisme etki eder: yönlendirilmiş bir kuvvet, bir sıvıya (gaz) daldırılmış bir cisme etki eder, yukarı doğru kaldırma kuvveti, cisim tarafından yer değiştiren sıvının (gaz) ağırlığına eşittir: F ANCAK =PgV, nerede R - sıvı yoğunluğu, V- bir sıvıya batırılmış bir cismin hacmi.
21. Akım hattı ve tüpü. Jet süreklilik teoremi.
Akışkanların hareketine akış, hareket halindeki akışkan parçacıklarının toplanmasına akış denir. Grafiksel olarak, sıvıların hareketi, onlara teğetlerin uzayda karşılık gelen noktalarda sıvı hızı vektörü ile aynı doğrultuda çakışacağı şekilde çizilen akım çizgileri kullanılarak tasvir edilir (Şekil 45). Akış çizgileri, çizgi sayısının, içinden geçtikleri, kendilerine dik alanın alanına oranı ile karakterize edilen yoğunlukları, sıvı akış hızının daha büyük olduğu yerlerde daha büyük olacak şekilde çizilir ve sıvının daha yavaş aktığı yerlerde daha az. Böylece, akım çizgilerinin modeline göre, uzayda farklı noktalarda hızın yönü ve modülü yargılanabilir, yani sıvı hareketinin durumu belirlenebilir. Akışkanın akış çizgileriyle sınırlanan kısmına akış tüpü denir. Akış çizgilerinin şekli ve konumu ile her bir noktasındaki hız değerleri zamanla değişmezse, bir akışkanın akışına sabit (veya durağan) denir.
Herhangi bir akım tüpünü düşünün. Bölümlerinden ikisini seçiyoruz S 1 ve S 2 ,
hız yönüne dik (Şek. 46). D zamanı için t bölüm boyunca S sıvı geçiş hacmi Sv D t; bu nedenle, 1 sn boyunca S 1 sıvının hacmini geçecek S 1 v 1 ,
nerede v 1 - kesitteki sıvı akış hızı S 1 .
bölüm aracılığıyla S 1 s için 2 sıvı hacmini geçecek S 2 v 2 ,
nerede v 2 - kesitte sıvı akış hızı S 2 .
Burada enine kesitteki akışkan hızının sabit olduğu varsayılır. Akışkan sıkıştırılamaz ise (r=const), o zaman kesitten S 2 bölümden geçen aynı hacimdeki sıvıyı geçecektir. S 1 ,
yani ![]() (29.1) Sonuç olarak, sıkıştırılamaz bir akışkanın akış hızı ile mevcut borunun kesitinin çarpımı bu akım borusu için sabit bir değerdir. Bağıntı (29.1), sıkıştırılamaz bir akışkan için süreklilik denklemi olarak adlandırılır.
(29.1) Sonuç olarak, sıkıştırılamaz bir akışkanın akış hızı ile mevcut borunun kesitinin çarpımı bu akım borusu için sabit bir değerdir. Bağıntı (29.1), sıkıştırılamaz bir akışkan için süreklilik denklemi olarak adlandırılır.
Bernoulli denklemi
Sıkıştırılamaz bir akışkan için süreklilik denklemine göre ![]() , sıvının kapladığı hacim sabit kalır, yani ifadeyi (30.5) D'ye bölmek V, nereye varmak R - sıvı yoğunluğu. Ancak bölümler keyfi olarak seçildiği için yazabiliriz.
, sıvının kapladığı hacim sabit kalır, yani ifadeyi (30.5) D'ye bölmek V, nereye varmak R - sıvı yoğunluğu. Ancak bölümler keyfi olarak seçildiği için yazabiliriz. ![]() (30.6)
(30.6)
İfade (30.6), İsviçreli fizikçi D. Bernoulli tarafından türetilmiştir ve Bernoulli denklemi olarak adlandırılır. Onun türetilmesinden görülebileceği gibi, Bernoulli denklemi, ideal bir akışkanın sabit akışına uygulanan enerjinin korunumu yasasının bir ifadesidir. Ayrıca, iç sürtünmesi çok yüksek olmayan gerçek sıvılar için de iyi çalışır. Değer R(30.6) formülünde statik basınç (etrafından uçtuğu cismin yüzeyindeki sıvı basıncı), değer rv 2 / 2 - dinamik basınç. Yukarıda da belirtildiği gibi, değer sağ hidrostatik basınçtır.
Yatay bir akım tüpü için ( h 1 =h 2 ) ifade (30.6), (30.7) olur
nerede p+rv 2 / 2'ye toplam basınç denir. Yatay bir akım tüpü için Bernoulli denkleminden (30.7) ve süreklilik denkleminden (29.1), bir sıvı farklı bölümlere sahip yatay bir borudan aktığında, daralma yerlerinde sıvı hızının daha büyük olduğunu ve statik basıncın daha büyük olduğunu takip eder. daha geniş yerlerde, yani hızın daha yavaş olduğu yerlerde daha fazladır. Bu, boru boyunca bir dizi basınç göstergesi yerleştirilerek gösterilebilir (Şekil 48).
23. Torricelli Formülü.
Yan duvarında sıvı seviyesinin altında bir derinlikte küçük bir delik bulunan sıvı içeren silindirik bir kap düşünelim (Şek. 51). İki bölüm düşünün (düzeyde h Kapta ve seviyede sıvının 1 serbest yüzeyi h 2 delikten çıkışı) ve Bernoulli denklemini yazın:
Basınçtan beri R 1 ve R 2 sıvıda birinci ve ikinci bölümlerin seviyelerinde atmosfere eşittir, yani. R 1 =p 2 ,
o zaman denklem şöyle görünecek ![]()
Süreklilik denkleminden (29.1) şu sonucu çıkar: v 2 /v 1 =S 1 /S 2 , nerede S 1 ve S 2 - geminin enine kesit alanları ve açıklığı. Eğer bir S 1 >>S 2 , sonraüye v/2 ihmal edilebilir ve
![]() Bu ifadeye Torricelli formülü denir. Açık bir kaptaki bir delikten sıvı çıkış hızı formülü
Bu ifadeye Torricelli formülü denir. Açık bir kaptaki bir delikten sıvı çıkış hızı formülü
24. Viskozite, Newton yasası. Akış rejimleri.
Viskozite (iç sürtünme), sıvının bir kısmının diğerine göre hareketine direnmek için gerçek sıvıların özelliğidir. Gerçek bir sıvının bazı katmanları diğerlerine göre hareket ettiğinde, katmanların yüzeyine teğetsel olarak yönlendirilen iç sürtünme kuvvetleri ortaya çıkar. Bu kuvvetlerin etkisi, katmanın daha hızlı hareket eden tarafından, daha yavaş hareket eden katmanın hızlanan bir kuvvetten etkilenmesi gerçeğinde kendini gösterir. Katmanın daha yavaş hareket eden tarafından, daha hızlı hareket eden katman bir geciktirme kuvvetinden etkilenir.
İç sürtünme kuvveti F ne kadar büyükse, katman yüzeyinin dikkate alınan alanı o kadar büyük olur S(Şekil 52) ve katmandan katmana geçiş sırasında sıvı akış hızının ne kadar hızlı değiştiğine bağlıdır. Katmanlar arasındaki mesafenin sayıldığı yön, dik katman akış hızları Değer, yönde katmandan katmana hareket ederken hızın ne kadar hızlı değiştiğini gösterir. X, tabakaların hareket yönüne diktir ve hız gradyanı olarak adlandırılır. Böylece, orantı katsayısının bulunduğu iç sürtünme kuvvetinin modülü (31.1) m sıvının doğasına bağlı olarak dinamik viskozite (veya basitçe viskozite) olarak adlandırılır. Viskozite birimi paskal saniyedir (Pa×s). Viskozite ne kadar büyük olursa, sıvı ideal olandan ne kadar farklı olursa, içinde o kadar büyük iç sürtünme kuvvetleri ortaya çıkar. Akışkan akışının iki modu vardır. Akışa, seçilen her ince tabaka birbirine karışmadan komşularına göre akış boyunca kayarsa laminer (katmanlı), akış boyunca yoğun girdap oluşumu ve sıvı (gaz) karışımı meydana gelirse türbülanslı (vorteks) denir. Bir sıvının laminer akışı, hareketinin düşük hızlarında gözlenir. Moleküler kohezyon kuvvetleri nedeniyle içinde aktığı borunun yüzeyine bitişik sıvının dış tabakası ona yapışır ve hareketsiz kalır. Borulardaki türbülanslı akış için ortalama hız profili (Şekil 53), laminer akış için parabolik profilden boru duvarlarının yakınında daha hızlı bir hız artışı ve akışın orta kısmında daha az eğrilik ile farklılık gösterir. Akışın doğası, adı verilen boyutsuz bir niceliğe bağlıdır. Reynolds sayısı: ![]() nerede n = h/p-kinematik viskozite; R- sıvı yoğunluğu;<v>-boru bölümü üzerindeki ortalama sıvı hızı; d- boru çapı gibi karakteristik doğrusal boyut. Reynolds sayısının düşük değerlerinde laminer bir akış gözlenir, bölgede laminerden türbülanslı akışa geçiş meydana gelir ve (düz borular için) akış türbülanslıdır.
nerede n = h/p-kinematik viskozite; R- sıvı yoğunluğu;<v>-boru bölümü üzerindeki ortalama sıvı hızı; d- boru çapı gibi karakteristik doğrusal boyut. Reynolds sayısının düşük değerlerinde laminer bir akış gözlenir, bölgede laminerden türbülanslı akışa geçiş meydana gelir ve (düz borular için) akış türbülanslıdır.
26. Poiseuille formülü. Viskozite belirleme yöntemleri.
Stokes yöntemi. Bu viskozite belirleme yöntemi, bir sıvı içinde yavaşça hareket eden küçük küresel cisimlerin hızının ölçülmesine dayanır. Bir sıvı içinde dikey olarak düşen bir topa üç kuvvet etki eder: yerçekimi P= 4 / 3 pr 3 rg(r- top yoğunluğu), Arşimet kuvveti P= 4 / 3 pr 3 r "g (r" - sıvı yoğunluğu) ve J. Stokes tarafından ampirik olarak kurulan direnç kuvveti: F= 6phrv, nerede r topun yarıçapı, v- onun hızı. Top düzgün hareket ettiğinde, nerede
Topun düzgün hareket hızını ölçerek, bir sıvının (gazın) viskozitesi belirlenebilir. Poiseuille yöntemi. Bu yöntem, ince bir kapiler sıvının laminer akışına dayanmaktadır. Yarıçaplı bir kılcal damar düşünün R ve uzunluk ben. Bir sıvıda, zihinsel olarak yarıçaplı silindirik bir tabaka seçiyoruz. r ve kalınlık d r(Şek. 54). Bu tabakanın yan yüzeyine etki eden iç sürtünme kuvveti (bkz. (31.1)), ![]() D nerede S- yan yüzey silindirik tabaka; eksi işareti, yarıçap arttıkça hızın azaldığı anlamına gelir. Entegrasyondan sonra, duvarların yakınında sıvı yapışmasının meydana geldiğini varsayarsak, yani belli bir mesafedeki hız R eksenden sıfıra eşittir, süre boyunca alırız t hacmi viskozitenin bulunduğu borudan bir sıvı akacaktır.
D nerede S- yan yüzey silindirik tabaka; eksi işareti, yarıçap arttıkça hızın azaldığı anlamına gelir. Entegrasyondan sonra, duvarların yakınında sıvı yapışmasının meydana geldiğini varsayarsak, yani belli bir mesafedeki hız R eksenden sıfıra eşittir, süre boyunca alırız t hacmi viskozitenin bulunduğu borudan bir sıvı akacaktır.
27. Sarkaçlar için serbest harmonik salınımların denklemi.
Salınımlar, başlangıçta verilen enerji nedeniyle ve daha sonra salınım sistemi (salınan sistem) üzerinde dış etkilerin olmaması nedeniyle gerçekleştirilirse serbest (veya doğal) olarak adlandırılır. En basit salınım türü harmonik salınımlardır - sinüs yasasına göre salınım değerinin zamanla değiştiği salınımlar (kosinüs). ). yaylı sarkaç bir kütle yüküdür t, mükemmel elastik bir yay üzerinde asılı ve elastik bir kuvvetin etkisi altında harmonik salınımlar gerçekleştiren F= -kx, nerede k- yay sertliği. Sarkaçın hareket denklemi
Yay sarkacının yasaya göre harmonik salınımlar gerçekleştirdiği ifadelerinden anlaşılmaktadır. x=Açünkü (w 0 t+ j) döngüsel frekans (142.2) ve periyot (142.3) ile Formül (142.3), Hooke yasasının yerine getirildiği sınırlar içindeki elastik salınımlar için, yani yayın kütlesi vücudun kütlesine kıyasla küçük olduğunda geçerlidir. Yay sarkacının potansiyel enerjisi, fiziksel sarkaç- bu, yerçekimi etkisi altında, bir noktadan geçen sabit bir yatay eksen etrafında salınan katı bir cisimdir. Ö kütle merkezi ile çakışmayan İTİBAREN gövde (Şek. 201). Sarkaç denge konumundan bir açıyla saparsa a, daha sonra, katı bir cismin (18.3) dönme hareketinin dinamiği denklemine göre, moment M geri yükleme kuvveti (142.4) olarak yazılabilir, burada J- sarkacın askı noktasından geçen eksen etrafındaki eylemsizlik momenti Ah ben- onunla sarkacın kütle merkezi arasındaki mesafe, F t \u003d -mg sinüs» -mga. - geri yükleme kuvveti (eksi işareti, yönlerin F t ve a her zaman zıt; günah a» a sarkacın küçük salınımlarına karşılık gelir, yani. sarkacın denge konumundan küçük sapmaları). Küçük salınımlar için, fiziksel sarkaç, döngüsel frekans w 0 ve bir periyot ile harmonik salınımlar gerçekleştirir.
Neresi L=J/(ml) - fiziksel sarkacın kısaltılmış uzunluğu.
matematiksel sarkaç- bu idealize edilmiş kütleli bir malzeme noktasından oluşan bir sistem t, uzamayan ağırlıksız bir iplik üzerinde asılı ve yerçekimi etkisi altında salınıyor. Matematiksel sarkacın iyi bir tahmini, ince, uzun bir ipten sarkan küçük, ağır bir toptur. Matematiksel sarkacın eylemsizlik momenti
(142.8) nerede ben sarkacın uzunluğudur. Matematiksel sarkaç şu şekilde temsil edilebildiğinden özel durum fiziksel sarkaç, tüm kütlesinin bir noktada yoğunlaştığını varsayarsak - kütle merkezi, daha sonra ifadeyi (142.8) formül (1417) ile değiştirerek, bir matematiksel sarkacın (142.9) küçük salınımları dönemi için bir ifade elde ederiz. Formülleri karşılaştırma (142.7) ) ve (142.9), verilen uzunluk ne ise görüyoruz L fiziksel sarkaç uzunluğuna eşittir ben matematiksel bir sarkaç, o zaman bu sarkaçların salınım periyotları aynıdır. Bu nedenle, fiziksel sarkacın azaltılmış uzunluğu, salınım periyodu belirli bir fiziksel sarkacın salınım periyoduna denk gelen böyle bir matematiksel sarkacın uzunluğudur.
28. Serbest harmonik salınımların kinematiği.
Mekanik harmonik salınım, salınan bir cismin (maddi nokta) koordinatlarının zamana bağlı olarak kosinüs veya sinüs yasasına göre değiştiği doğrusal düzgün olmayan bir harekettir. Bu tanıma göre, zamana bağlı olarak koordinat değişimi yasası şu şekildedir: , burada wt kosinüs veya sinüs işaretinin altındaki değerdir; w- katsayısı, fiziksel anlam aşağıda açıklayacağımız; A, mekanik harmonik salınımların genliğidir. Denklemler (4.1) mekanik harmonik titreşimlerin ana kinematik denklemleridir.
harmonik mekanik salınımlar gerçekleştiren bir malzeme noktası için, w değeri, 2l'ye eşit, belirli bir zaman döngüsü için salınım sayısı olarak yorumlanabilir. Bu nedenle, w'nin değerine döngüsel (veya dairesel) frekans adı verildi. M noktası hareketine 1. noktadan değil 2. noktadan başlarsa denklem (4.1) şu şekilde olur: f0 değerine başlangıç fazı denir.
![]()
29. Sönümlü titreşimler.
Serbest sönümlü salınımları ele alalım - gerçek bir salınım sistemi tarafından enerji kayıpları nedeniyle genlikleri zamanla azalan salınımlar. diferansiyel denklem serbest sönümlü salınımlar lineer sistemşeklinde verilir
(146.1), nerede s- birini veya diğerini tanımlayan dalgalı bir değer fiziksel süreç, d=const - zayıflama katsayısı, w 0 - serbest döngüsel frekans sönümsüz aynı salınım sisteminin salınımları, yani. d'de = 0 (enerji kayıplarının yokluğunda) salınım sisteminin doğal frekansı olarak adlandırılır.
- sönümlü salınımların genliği, a ANCAK 0 -
başlangıç genliği. Eğer bir bir(t) ve ANCAK(t+ T) - Bir periyoda göre farklılık gösteren zamanlara karşılık gelen art arda iki salınımın genlikleri, o zaman oran denir sönümleme azalması, ve logaritması ![]() (146.7)- logaritmik sönüm azalması; N e -
genliğin e kat azaldığı süre boyunca yapılan salınımların sayısı. Logaritmik sönüm azalması, belirli bir salınım sistemi için sabit bir değerdir. Bir salınım sistemini karakterize etmek için konsept kullanılır kalite faktörü Q, logaritmik azalmanın küçük değerleri için
(146.7)- logaritmik sönüm azalması; N e -
genliğin e kat azaldığı süre boyunca yapılan salınımların sayısı. Logaritmik sönüm azalması, belirli bir salınım sistemi için sabit bir değerdir. Bir salınım sistemini karakterize etmek için konsept kullanılır kalite faktörü Q, logaritmik azalmanın küçük değerleri için ![]() (146.8). Formülden (146.8) kalite faktörünün salınım sayısıyla orantılı olduğu sonucu çıkar. N e ,
dinlenme süresi boyunca sistem tarafından gerçekleştirilir.
(146.8). Formülden (146.8) kalite faktörünün salınım sayısıyla orantılı olduğu sonucu çıkar. N e ,
dinlenme süresi boyunca sistem tarafından gerçekleştirilir.
30. Zorlanmış titreşimler, rezonans.
Periyodik olarak değişen harici bir kuvvetin veya harici periyodik olarak değişen bir emf'nin etkisi altında ortaya çıkan salınımlara sırasıyla zorlanmış mekanik ve zorunlu elektromanyetik salınımlar denir. Bağımlılığı düşünün genlik A zorlamalı titreşimler frekans. Mekanik ve elektromanyetik salınımlar, salınım değeri veya yer değiştirme olarak adlandırılarak aynı anda dikkate alınacaktır. (X) bir denge konumundan veya bir yükten salınan bir cisim (Q) kapasitör.
(147.8) formülünden, genliğin ANCAK yer değiştirme (şarj) bir maksimuma sahiptir. Rezonans frekansını belirlemek için w kesim, - genliğin hangi frekansta olduğu ANCAK yer değiştirme (yük) bir maksimuma ulaşır - işlevin maksimumunu (147.8) veya aynı olan, radikal ifadenin minimumunu bulmanız gerekir. Radikal ifadeyi aşağıdakilere göre ayırt etmek w ve onu sıfıra eşitleyerek, belirleyen koşulu elde ederiz. w kesmek: ![]() Bu eşitlik için geçerlidir w=0, ± , bunun için yalnızca pozitif bir değerin fiziksel bir anlamı vardır. Sonuç olarak, rezonans frekansı (148.1) Sürücü kuvvetin frekansı (sürülen alternatif voltajın frekansı) salınımın doğal frekansına eşit veya yakın bir frekansa yaklaştığında, zorlanmış salınımların genliğinde keskin bir artış olgusu. sisteme rezonans (sırasıyla mekanik veya elektrik) denir. Değer ne zaman w kesim neredeyse doğal frekansla çakışıyor w 0 salınımlı sistem. (148.1) formülünü (147.8) yerine koyarsak, (148.2) elde ederiz.
Bu eşitlik için geçerlidir w=0, ± , bunun için yalnızca pozitif bir değerin fiziksel bir anlamı vardır. Sonuç olarak, rezonans frekansı (148.1) Sürücü kuvvetin frekansı (sürülen alternatif voltajın frekansı) salınımın doğal frekansına eşit veya yakın bir frekansa yaklaştığında, zorlanmış salınımların genliğinde keskin bir artış olgusu. sisteme rezonans (sırasıyla mekanik veya elektrik) denir. Değer ne zaman w kesim neredeyse doğal frekansla çakışıyor w 0 salınımlı sistem. (148.1) formülünü (147.8) yerine koyarsak, (148.2) elde ederiz.
Şek. 210, çeşitli değerler için zorunlu salınımların genliğinin frekansa bağımlılığını gösterir. d.(148.1) ve (148.2)'den, daha az d, daha yüksekte ve sağda bu eğrinin maksimumu bulunur. Eğer bir w® 0, ardından tüm eğriler (ayrıca (147.8)'e bakın) aynı sıfır olmayan sınır değerine ulaşır ,
buna statik sapma denir. Mekanik titreşimler durumunda ![]() , elektromanyetik durumda sen m /
(L). Eğer bir w®¥ ise eğriler asimptotik olarak sıfıra eğilim gösterir. Azaltılmış eğriler kümesine rezonans eğrileri denir.
, elektromanyetik durumda sen m /
(L). Eğer bir w®¥ ise eğriler asimptotik olarak sıfıra eğilim gösterir. Azaltılmış eğriler kümesine rezonans eğrileri denir.
Enerjinin korunumu yasası, vücudun enerjisinin asla kaybolmadığını ve yeniden ortaya çıkmadığını, yalnızca bir biçimden diğerine dönebileceğini belirtir. Bu yasa evrenseldir. Fiziğin çeşitli dallarında kendi formülasyonu vardır. Klasik mekanik, mekanik enerjinin korunumu yasasını dikkate alır.
Kapalı bir sistemin toplam mekanik enerjisi fiziksel bedenler arasında korunumlu kuvvetlerin etki ettiği , sabit bir değerdir. Newton mekaniğinde enerjinin korunumu yasası bu şekilde formüle edilir.
Kapalı veya izole olarak kabul edilir. fiziksel sistem, dış güçlerden etkilenmez. Çevredeki boşlukla enerji alışverişi yapmaz ve sahip olduğu kendi enerjisi değişmeden kalır, yani korunur. Böyle bir sistemde sadece Iç kuvvetler ve bedenler birbirleriyle etkileşime girer. Sadece potansiyel enerjiyi kinetik enerjiye çevirebilir ve bunun tersi de mümkündür.
Kapalı bir sistemin en basit örneği bir keskin nişancı tüfeği ve bir mermidir.
Mekanik kuvvet türleri
Mekanik bir sistem içinde hareket eden kuvvetler genellikle muhafazakar ve muhafazakar olmayan olarak ayrılır.
tutucuİşleri, uygulandıkları cismin yörüngesine bağlı olmayan, sadece bu cismin ilk ve son konumu tarafından belirlenen kuvvetler kabul edilir. Muhafazakar kuvvetler de denir potansiyel. Kapalı bir döngüde bu tür kuvvetlerin işi sıfırdır. Muhafazakar kuvvet örnekleri - yerçekimi kuvveti, elastik kuvvet.
Diğer tüm kuvvetler denir muhafazakar olmayan. Bunlar şunları içerir: sürtünme kuvveti ve sürükleme kuvveti. Onlar da denir enerji tüketen kuvvetler. Bu kuvvetler, kapalı bir mekanik sistemdeki herhangi bir hareket sırasında negatif iş yaparlar ve onların etkisi altında sistemin toplam mekanik enerjisi azalır (dağılır). Diğer mekanik olmayan enerji türlerine, örneğin ısıya geçer. Bu nedenle, kapalı bir mekanik sistemde enerjinin korunumu yasası, ancak içinde korunumlu olmayan kuvvetler yoksa yerine getirilebilir.
Mekanik bir sistemin toplam enerjisi, kinetik ve potansiyel enerjiden oluşur ve bunların toplamıdır. Bu tür enerjiler birbirine dönüşebilir.
Potansiyel enerji
Potansiyel enerji fiziksel bedenlerin veya parçalarının birbirleriyle etkileşim enerjisi olarak adlandırılır. Karşılıklı düzenlemeleri, yani aralarındaki mesafe ile belirlenir ve gövdeyi referans noktasından muhafazakar kuvvetler alanında başka bir noktaya taşımak için yapılması gereken işe eşittir.
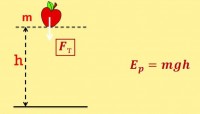
Potansiyel enerji, muhafazakar bir kuvvet olan yerçekiminden etkilendiğinden, belirli bir yüksekliğe yükseltilmiş herhangi bir hareketsiz fiziksel bedene sahiptir. Bu tür bir enerji, bir şelalenin kenarındaki su, bir dağın tepesindeki bir kızakta bulunur.
Bu enerji nereden geldi? Fiziksel beden bir yüksekliğe yükseltilirken iş yapılır ve enerji harcanırdı. Yükseltilmiş bedende depolanan bu enerjidir. Ve şimdi bu enerji iş yapmaya hazır.
Vücudun potansiyel enerjisinin değeri, vücudun bazı başlangıç seviyelerine göre bulunduğu yükseklik tarafından belirlenir. Başlangıç noktası olarak seçtiğimiz herhangi bir noktayı alabiliriz.
Vücudun Dünya'ya göre konumunu düşünürsek, o zaman potansiyel enerji Dünya yüzeyindeki cisim sıfırdır. ve üstte h şu formülle hesaplanır:
E p = mɡ h ,
nerede m - vücut kütlesi
ɡ - yerçekimi ivmesi
h - cismin kütle merkezinin dünyaya göre yüksekliği
ɡ \u003d 9,8 m / s 2
Bir vücut bir yükseklikten düştüğünde h1 yüksekliğe kadar h2 yerçekimi işe yarıyor. Bu iş, potansiyel enerjideki değişime eşittir ve vücut düştükçe potansiyel enerjinin büyüklüğü azaldığı için negatif bir değere sahiptir.
bir = - ( E p2 - E p1) = - ∆ E p ,
nerede E p1 cismin yükseklikteki potansiyel enerjisidir h1 ,
E p2 - yükseklikteki bir cismin potansiyel enerjisi h2 .
Vücut belirli bir yüksekliğe kaldırılırsa, yerçekimi kuvvetlerine karşı iş yapılır. Bu durumda, pozitif bir değere sahiptir. Ve vücudun potansiyel enerjisinin değeri artar.
Elastik olarak deforme olmuş bir gövde (sıkıştırılmış veya gerilmiş yay). Değeri, yayın sertliğine ve ne kadar süreyle sıkıştırıldığına veya gerildiğine bağlıdır ve aşağıdaki formülle belirlenir:
E p \u003d k (∆x) 2 / 2 ,
nerede k - sertlik katsayısı,
∆x - vücudun uzaması veya kasılması.
Yay potansiyel enerjisi iş yapabilir.
Kinetik enerji

Yunancadan çevrilen "kinema", "hareket" anlamına gelir. Fiziksel bir cismin hareketi sonucunda aldığı enerjiye denir. kinetik. Değeri hareket hızına bağlıdır.
Sahada yuvarlanan bir futbol topu, bir dağdan aşağı yuvarlanan ve hareket etmeye devam eden bir kızak, bir yaydan fırlatılan bir ok - hepsinin kinetik enerjisi vardır.
Bir cisim dinlenme halindeyse kinetik enerjisi sıfırdır. Vücuda bir kuvvet veya birkaç kuvvet etki eder etmez hareket etmeye başlayacaktır. Ve vücut hareket ettiğinden, ona etki eden kuvvet iş yapar. Etkisi altında kalan cismin hareket edeceği ve hızını sıfırdan sıfıra değiştireceği kuvvetin işi. ν , denir kinetik enerji vücut kütlesi m .
İlk anda, vücut zaten hareket halindeyse ve hızının değeri v 1 ve sonunda şuna eşitti v 2 cisme etki eden kuvvet veya kuvvetlerin yaptığı iş, cismin kinetik enerjisindeki artışa eşit olacaktır.
∆ E k = E k 2 - 1
Kuvvetin yönü hareketin yönüne denk gelirse pozitif iş yapılır ve cismin kinetik enerjisi artar. Kuvvet, hareket yönünün tersi yönde yönlendirilirse, negatif iş yapılır ve vücut kinetik enerji verir.
Mekanik enerjinin korunumu yasası
Ek 1 + E p1= E k 2 + E p2
Belli bir yükseklikte bulunan herhangi bir fiziksel beden potansiyel enerjiye sahiptir. Ancak düşerken bu enerjisini kaybetmeye başlar. Nereye gidiyor? Hiçbir yerde kaybolmadığı, aynı cismin kinetik enerjisine dönüştüğü ortaya çıktı.
Sanmak , belirli bir yükseklikte bir yük hareketsizce sabitlenir. Bu noktadaki potansiyel enerjisi maksimum değere eşittir. Bırakırsak, belirli bir hızda düşmeye başlayacaktır. Bu nedenle, kinetik enerji kazanmaya başlayacaktır. Ancak aynı zamanda potansiyel enerjisi azalmaya başlayacaktır. Çarpma noktasında vücudun kinetik enerjisi maksimuma ulaşacak ve potansiyel enerji sıfıra inecektir.
Yüksekten atılan bir topun potansiyel enerjisi azalırken kinetik enerjisi artar. Bir dağın tepesinde duran kızakların potansiyel enerjisi vardır. Bu andaki kinetik enerjileri sıfırdır. Ama aşağı yuvarlanmaya başladıklarında kinetik enerji artacak ve potansiyel enerji de aynı oranda azalacaktır. Ve değerlerinin toplamı değişmeden kalacaktır. Ağaçta asılı duran bir elmanın potansiyel enerjisi, düştüğünde kinetik enerjisine dönüşür.
Bu örnekler, enerjinin korunumu yasasını açıkça doğrulamaktadır; mekanik bir sistemin toplam enerjisi sabit bir değerdir . Sistemin toplam enerjisinin değeri değişmez ve potansiyel enerji kinetik enerjiye dönüştürülür ve bunun tersi de geçerlidir.
Potansiyel enerji ne kadar azalırsa, kinetik enerji de aynı miktarda artacaktır. Bunların miktarı değişmeyecektir.
Kapalı bir fiziksel beden sistemi için eşitlik
E k1 + E p1 = E k2 + E p2,
nerede E k1, E p1
- Herhangi bir etkileşimden önce sistemin kinetik ve potansiyel enerjileri, E k2 , E p2
- ondan sonra karşılık gelen enerjiler.
Kinetik enerjiyi potansiyel enerjiye dönüştürme süreci ve bunun tersi, sallanan bir sarkaç izlenerek görülebilir.
resme tıklayın
Aşırı sağ pozisyonda olan sarkaç donuyor gibi görünüyor. Bu anda, referans noktasının üzerindeki yüksekliği maksimumdur. Bu nedenle, potansiyel enerji de maksimumdur. Ve hareket etmediği için kinetik sıfırdır. Ama bir sonraki an sarkaç aşağı doğru hareket etmeye başlar. Hızı artar ve dolayısıyla kinetik enerjisi artar. Ancak yükseklik azaldıkça potansiyel enerji de azalır. Alt noktada sıfıra eşit olacak ve kinetik enerji maksimum değerine ulaşacaktır. Sarkaç bu noktayı geçecek ve sola doğru yükselmeye başlayacaktır. Potansiyel enerjisi artmaya başlayacak ve kinetik enerjisi azalacaktır. Vb.
Enerjinin dönüşümünü göstermek için Isaac Newton icat etti mekanik sistem, denir Newton beşiği veya Newton'un topları .
resme tıklayın
İlk topu saptırır ve sonra bırakırsanız, enerjisi ve momentumu hareketsiz kalacak olan üç ara top aracılığıyla sonuncuya aktarılacaktır. Ve son top aynı hızla yön değiştirecek ve ilk top ile aynı yüksekliğe yükselecektir. Sonra son top, enerjisini ve momentumunu ara toplardan birinciye aktaracak, vb.
Kenara atılan bir top maksimum potansiyel enerjiye sahiptir. Bu andaki kinetik enerjisi sıfırdır. Hareket etmeye başladıktan sonra potansiyel enerjisini kaybeder ve ikinci topla çarpışma anında maksimum değerine ulaşan kinetik enerji kazanır ve potansiyel enerji sıfıra eşit olur. Ayrıca, kinetik enerji ikinciye, ardından üçüncü, dördüncü ve beşinci toplara aktarılır. İkincisi, kinetik enerji almış, hareket etmeye başlar ve ilk topun hareketin başlangıcında olduğu aynı yüksekliğe yükselir. Bu andaki kinetik enerjisi sıfıra eşittir ve potansiyel enerjisi maksimum değere eşittir. Daha sonra düşmeye başlar ve aynı şekilde enerjiyi toplara ters sırada aktarır.
Bu oldukça uzun bir süre devam eder ve muhafazakar olmayan güçler olmasaydı süresiz olarak devam edebilirdi. Ancak gerçekte, topların enerjilerini kaybettiği etkisi altında, sistemde enerji tüketen kuvvetler hareket eder. Hızları ve genlikleri yavaş yavaş azalır. Ve sonunda dururlar. Bu, enerjinin korunumu yasasının yalnızca korunumlu olmayan kuvvetlerin yokluğunda karşılandığını doğrular.
Toplam mekanik enerji, cisimlerin hareketini ve etkileşimini karakterize eder, bu nedenle cisimlerin hızlarına ve göreceli konumuna bağlıdır.
Kapalı bir mekanik sistemin toplam mekanik enerjisi, bu sistemin gövdelerinin kinetik ve potansiyel enerjilerinin toplamına eşittir:
enerji tasarrufu yasası
Enerjinin korunumu yasası, doğanın temel yasasıdır.
Newton mekaniğinde, enerjinin korunumu yasası şu şekilde formüle edilir:
Yalıtılmış (kapalı) bir vücut sisteminin toplam mekanik enerjisi sabit kalır.
Diğer bir deyişle:
Enerji yoktan doğmaz ve hiçbir yerde kaybolmaz, sadece bir biçimden diğerine geçebilir.
Bu ifadenin klasik örnekleri şunlardır: bir yaylı sarkaç ve bir diş üzerinde bir sarkaç (ihmal edilebilir sönümleme ile). Bir yay sarkaç durumunda, salınım sürecinde, deforme olmuş bir yayın potansiyel enerjisi (yükün uç konumlarında maksimuma sahiptir) yükün kinetik enerjisine dönüştürülür (şu anda maksimuma ulaşır). yük denge konumunu geçer) ve bunun tersi de geçerlidir. Bir iplik üzerinde bir sarkaç durumunda, yükün potansiyel enerjisi kinetik enerjiye dönüştürülür ve bunun tersi de geçerlidir.
2 Ekipman
2.1 Dinamometre.
2.2 Laboratuvar standı.
2.3 100 g - 2 adet ağırlığındaki yük.
2.4 Ölçüm cetveli.
2.5 Parça yumuşak doku veya hissettim.
3 Teorik arka plan
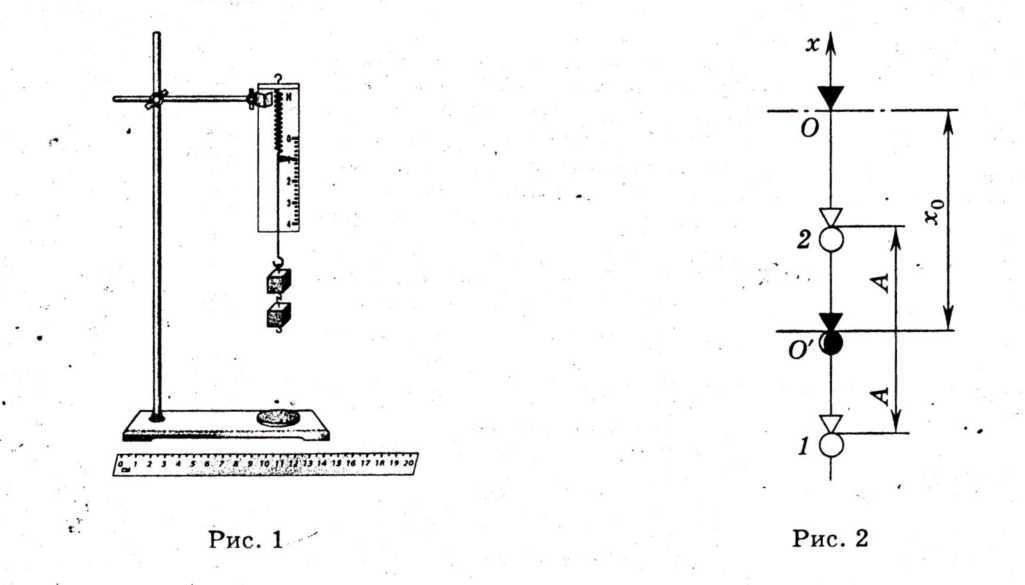
Deney düzeneğinin şeması Şekil 1'de gösterilmektedir.
Dinamometre, tripodun ayağına dikey olarak sabitlenmiştir. Bir tripod üzerine bir parça yumuşak bez veya keçe yerleştirilir. Dinamometreden yükleri asarken, dinamometre yayının gerilimi, işaretçinin konumu ile belirlenir. Bu durumda, yayın maksimum uzaması (veya statik yer değiştirmesi) X 0 sertliği olan bir yayın elastik kuvveti olduğunda oluşur k yükün yerçekimi kuvvetini kütle ile dengeler t:
kx 0 = mg, (1)
nerede g = 9.81 - serbest düşüş ivmesi.
Sonuç olarak,
Statik yer değiştirme, yayın alt ucunun yeni denge konumunu O" karakterize eder (Şekil 2).
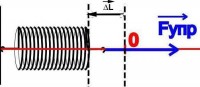
Yük bir mesafe aşağı çekilirse ANCAK O" noktasından itibaren ve 1. noktada bırakın, ardından yükün periyodik salınımları meydana gelir. 1 ve 2, dönüş noktaları olarak adlandırılan yük durur, hareket yönünü tersine çevirir. Dolayısıyla bu noktalarda yükün hızı v = 0.
Max hız v m balta yük O" orta noktasında olacaktır. Salınım yüküne iki kuvvet etki eder: sabit yerçekimi kuvveti mg ve değişken elastik kuvvet kx. Koordinatlı rastgele bir noktada yerçekimi alanındaki bir cismin potansiyel enerjisi X eşittir mgx. Deforme olmuş cismin potansiyel enerjisi sırasıyla eşittir.
Bu durumda, nokta X = 0, gerilmemiş bir yay için işaretçinin konumuna karşılık gelir.
İsteğe bağlı bir noktadaki yükün toplam mekanik enerjisi, potansiyel ve kinetik enerjisinin toplamıdır. Sürtünme kuvvetlerini ihmal ederek toplam mekanik enerjinin korunumu yasasını kullanırız.
2. noktadaki yükün toplam mekanik enerjisini koordinat ile eşitleyelim. -(X 0 -ANCAK) ve koordinatlı O" noktasında -X 0 :
Parantezleri genişleterek ve basit dönüşümler yaparak, formül (3)'ü forma getiriyoruz.
Ardından maksimum yük hızı modülü
Bir yayın sertliği, statik yer değiştirmeyi ölçerek bulunabilir. X 0 . Formül (1)'den aşağıdaki gibi,
3.5. Enerjinin korunumu ve değişimi yasaları
3.5.1. Değişim Yasası toplam mekanik enerji
Bir cisim sisteminin toplam mekanik enerjisindeki bir değişiklik, hem sistemin cisimleri arasında hem de dış cisimlerden etki eden kuvvetler tarafından iş yapıldığında meydana gelir.
Bir cisimler sisteminin mekanik enerjisindeki ∆E değişimi şu şekilde belirlenir: toplam mekanik enerjinin değişim yasasına göre:
∆E \u003d E 2 - E 1 \u003d A ext + A tr (direnç),
burada E1 sistemin ilk durumunun toplam mekanik enerjisidir; E 2 - sistemin son halinin toplam mekanik enerjisi; Bir dış - sistemin gövdeleri üzerinde dış kuvvetler tarafından yapılan iş; A tr (direnç) - sistemin içine etki eden sürtünme (direnç) kuvvetlerinin yaptığı iş.
Örnek 30. Belirli bir yükseklikte, hareketsiz duran bir cismin potansiyel enerjisi 56 J'dir. Yere düştüğünde cismin kinetik enerjisi 44 J'dir. Hava direnci kuvvetlerinin işini belirleyin.
Çözüm. Şekil vücudun iki konumunu göstermektedir: belirli bir yükseklikte (birinci) ve Dünya'ya düşme anında (ikinci). Dünya yüzeyinde sıfır potansiyel enerji seviyesi seçilir.
Bir cismin Dünya yüzeyine göre toplam mekanik enerjisi, potansiyel ve kinetik enerjinin toplamı ile belirlenir:
- biraz yükseklikte
E 1 \u003d W p 1 + W k 1;
- yere çarptığında
E 2 \u003d W p 2 + W k 2,
burada W p 1 = 56 J, vücudun belirli bir yükseklikteki potansiyel enerjisidir; W k 1 = 0 - belirli bir yükseklikte duran bir cismin kinetik enerjisi; W p 2 = 0 J - Dünya'ya düşme anında vücudun potansiyel enerjisi; W k 2 \u003d 44 J - vücudun Dünya'ya düştüğü zamandaki kinetik enerjisi.
Vücudun toplam mekanik enerjisindeki değişim yasasından hava direnci kuvvetlerinin çalışmasını buluruz:
burada E 1 = W p 1, vücudun belirli bir yükseklikteki toplam mekanik enerjisidir; E 2 \u003d W k 2 - Dünya'ya düştüğü zaman vücudun toplam mekanik enerjisi; ext \u003d 0 - dış kuvvetlerin çalışması (dış kuvvetler yoktur); Direnç - hava direnci kuvvetlerinin işi.
Hava direnci kuvvetlerinin istenen işi bu nedenle ifade ile belirlenir.
Bir direnç = W k 2 - W p 1 .
Hesabı yapalım:
Bir direnç \u003d 44 - 56 \u003d -12 J.
Hava direnci kuvvetlerinin işi negatif bir değerdir.
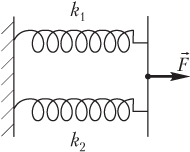
Örnek 31. 1.0 kN/m ve 2.0 kN/m sertlik faktörlerine sahip iki yay paralel olarak bağlanmıştır. Yay sistemini 20 cm uzatmak için ne iş yapılmalıdır?
Çözüm. Şekil, paralel olarak bağlanmış farklı yay oranlarına sahip iki yayı göstermektedir.
Yayları geren dış kuvvet F → , kompozit yayın deformasyonunun büyüklüğüne bağlıdır, bu nedenle, sabit bir kuvvetin işini hesaplamak için formül kullanılarak belirtilen kuvvetin işinin hesaplanması yasaktır.
İşi hesaplamak için sistemin toplam mekanik enerjisindeki değişim yasasını kullanıyoruz:
E 2 − E 1 = A dahili + A direnç,
burada E1, kompozit yayın deforme olmamış durumdaki toplam mekanik enerjisidir; E 2 - deforme olmuş yayın toplam mekanik enerjisi; Bir dış - dış kuvvetin işi (istenen değer); Direnç = 0 - direnç kuvvetlerinin işi.
Kompozit bir yayın toplam mekanik enerjisi, deformasyonunun potansiyel enerjisidir:
- deforme olmamış yay için
E 1 \u003d W p 1 \u003d 0,
- uzatılmış yay için
E 2 \u003d W p 2 \u003d k toplam (Δ l) 2 2,
nerede k toplam - kompozit yayın toplam sertliği; ∆l - yayın gerilmesinin büyüklüğü.
Paralel bağlı iki yayın toplam rijitliği
k toplam \u003d k 1 + k 2,
burada k 1 - ilk yayın sertlik katsayısı; k 2 - ikinci yayın sertlik katsayısı.
Vücudun toplam mekanik enerjisindeki değişim yasasından dış kuvvetin işini buluruz:
Bir dahili \u003d E 2 - E 1,
bu ifadede, E 1 ve E 2'yi belirleyen formüllerin yanı sıra kompozit yayın toplam sertlik katsayısının ifadesini değiştirerek:
Bir dahili \u003d k toplam (Δ l) 2 2 − 0 \u003d (k 1 + k 2) (Δ l) 2 2.
Hesabı yapalım:
Bir ext \u003d (1.0 + 2.0) ⋅ 10 3 ⋅ (20 ⋅ 10 − 2) 2 2 \u003d 60 J.
Örnek 32. 800 m/s hızla uçan 10.0 g kütleli bir mermi duvara çarpıyor. Duvardaki bir merminin hareketine direnç kuvvetinin modülü sabittir ve 8.00 kN'dir. Merminin duvara ne kadar nüfuz edeceğini belirleyin.
Çözüm. Şekil, merminin iki konumunu göstermektedir: duvara yaklaştığı zaman (ilk) ve merminin duvarda durduğu (sıkıştığı) an (ikinci).
Bir merminin toplam mekanik enerjisi, hareketinin kinetik enerjisidir:
- bir mermi duvara çarptığında
E 1 \u003d W k 1 \u003d m v 1 2 2;
- mermi duvarda durduğunda (sıkıştığında)
E 2 \u003d W k 2 \u003d m v 2 2 2,
nerede W k 1 - duvara yaklaşırken merminin kinetik enerjisi; W k 2 - merminin duvarda durduğu (sıkıştığı) zamana kadarki kinetik enerjisi; m merminin kütlesidir; v 1 - duvara yaklaşırken mermi hızı modülü; v 2 \u003d 0 - duvarda durma (sıkışma) anındaki mermi hızının değeri.
Merminin duvarın derinliklerine gireceği mesafeyi, merminin toplam mekanik enerjisindeki değişim yasasından buluruz:
E 2 − E 1 = A dahili + A direnç,
nerede E 1 \u003d m v 1 2 2 - duvara yaklaşırken merminin toplam mekanik enerjisi; E 2 \u003d 0 - merminin duvarda durduğu (sıkıştığı) zamana kadar toplam mekanik enerjisi; ext \u003d 0 - dış kuvvetlerin çalışması (dış kuvvetler yoktur); Direniş - direniş güçlerinin işi.
Direnç kuvvetlerinin işi ürün tarafından belirlenir:
A direnç = F direnç l cos α ,
nerede F direniyor - merminin hareketine direnç kuvvetinin modülü; l - merminin duvarın derinliklerine gireceği mesafe; α = 180° - sürükleme kuvvetinin yönleri ile merminin yönü arasındaki açı.
Böylece, bir merminin toplam mekanik enerjisindeki açık bir biçimde değişim yasası aşağıdaki gibidir:
− m v 1 2 2 = F direnci l cos 180 ° .
İstenilen mesafe orana göre belirlenir
l = − m v 1 2 2 F direnç cos 180 ° = m v 1 2 2 F direnç
l = 10.0 ⋅ 10 − 3 ⋅ 800 2 2 ⋅ 8.00 ⋅ 10 3 = 0.40 m = 400 mm.
Sayfa 1
Vücudun toplam mekanik enerjisi değişmez. Enerji yalnızca bir biçimden diğerine değişir.
Sürtünme ve direnç kuvvetlerinden etkilenmeyen bir cismin toplam mekanik enerjisi, hareketi sırasında değişmeden kalır.
Bir cismin toplam mekanik enerjisi, kinetik ve potansiyel enerjilerinin toplamıdır. Düşünmek tam Enerji farklı zamanlarda serbestçe düşen vücut.
Düştüğünde vücudun toplam mekanik enerjisi değişir mi?
Vücudun toplam mekanik enerjisi denir.
Böylece harmonik salınımlar yapan bir cismin toplam mekanik enerjisi salınım genliğinin karesi ile orantılıdır. Bu nedenle, salınımların genliği A da zamana bağlı değildir.
(44.13)'ten görülebileceği gibi, sönümlü salınımlar sırasında cismin toplam mekanik enerjisi üstel bir yasaya göre zamanla azalır.
Kinetik ve potansiyel enerjilerin toplamı vücudun toplam mekanik enerjisini oluşturur.
Kesinlikle esnek bir darbe, cisimlerin toplam mekanik enerjisinin korunduğu bir darbedir. İlk olarak, kinetik enerji kısmen veya tamamen elastik deformasyon potansiyel enerjisine dönüştürülür. Daha sonra cisimler birbirlerini iterek orijinal şekillerine dönerler. Sonuç olarak, elastik deformasyonun potansiyel enerjisi tekrar kinetik enerjiye dönüşür ve cisimler iki koşul tarafından belirlenen hızlarla birbirinden ayrılır - toplam enerjinin korunumu ve toplam dürtü tel.
Kesinlikle esnek bir darbe, cisimlerin toplam mekanik enerjisinin korunduğu bir darbedir. İlk olarak, kinetik enerji kısmen veya tamamen elastik deformasyon potansiyel enerjisine dönüştürülür. Daha sonra cisimler birbirlerini iterek orijinal şekillerine dönerler. Sonuç olarak, elastik deformasyonun potansiyel enerjisi tekrar kinetik enerjiye dönüşür ve cisimler iki koşul tarafından belirlenen hızlarla ayrılır - toplam enerjinin korunumu ve cisimlerin toplam momentumu.
Kesinlikle esnek bir darbe, cisimlerin toplam mekanik enerjisinin korunduğu bir darbedir. İlk olarak, kinetik enerji kısmen veya tamamen elastik deformasyon potansiyel enerjisine dönüştürülür. Daha sonra cisimler birbirlerini iterek orijinal şekillerine dönerler. Sonuç olarak, elastik deformasyonun potansiyel enerjisi tekrar kinetik enerjiye dönüşür ve cisimler iki koşul tarafından belirlenen hızlarla ayrılır - toplam enerjinin korunumu ve cisimlerin toplam momentumu.
Bu çalışma, enerjiyi dağıtmak veya vücudun toplam mekanik enerjisini değiştirmek için harcanır.
Enerji değişimi yasasına göre (bkz. § 28), direnç kuvvetinin (dış kuvvet) işi, vücudun toplam mekanik enerjisinin artışına eşittir.
Bu sonuç tahmin edilebilir, çünkü cismin altında hareket ettiği elastik kuvvet muhafazakardır, bu nedenle enerji koruma yasası yerine getirilir - cismin toplam mekanik enerjisi korunur.
Mekanik enerji, bir vücudun mekanik iş yapma yeteneğini karakterize eder. Bir cismin toplam mekanik enerjisi, kinetik ve potansiyel enerjinin toplamıdır.





