Analiza structurală a mecanismelor. Cuplu cinematic
Conceptul de pereche cinematică
Cuplu cinematic se numește o conexiune mobilă a două legături. Perechile cinematice sunt clasificate după mai multe criterii:
1) în funcție de numărul de legături suprapuse mișcării relative a legăturilor legate într-o pereche cinematică. Pe această bază, perechile cinematice sunt împărțite în clase. Sunt acceptate următoarele denumiri:
W este numărul de grade de libertate
S este numărul de legături suprapuse mișcării relative a legăturilor.
O legătură liberă în spațiu are șase grade de libertate. Când legăturile sunt conectate, unele dintre aceste grade de libertate sunt luate („conexiunile sunt impuse”). Relația dintre numărul de legături suprapuse și numărul rămas de grade de libertate în mișcarea relativă a legăturilor este evidentă:
sau
S=6–W,
astfel, există cinci clase de perechi cinematice (dacă iei toate cele șase grade de libertate, obții o conexiune fixă).
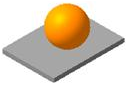
Figura 2 prezintă exemple de perechi cinematice.
| A) |
S \u003d 1 \u003d\u003e Clasa I.
|
S \u003d 2 \u003d\u003e Clasa II.
|
S \u003d 3 \u003d\u003e Clasa III.
|
 b)
b)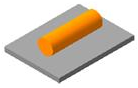 în)
în)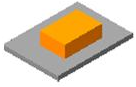 G)
G)Figura 2
Bila în raport cu planul (Figura 2b), fără a o părăsi, poate efectua mișcări de rotație în jurul tuturor celor trei axe de coordonate, precum și deplasarea de-a lungul axelor „X” și „Y”. Când se deplasează de-a lungul axei „Z”, mingea va ieși din plan, adică vor exista două legături libere - perechea cinematică va înceta să mai existe. Astfel, o conexiune este suprapusă mișcării relative a legăturilor - aceasta este o pereche cinematică de clasa I.
În mod similar, fără a încălca natura contactului, cilindrul nu poate fi deplasat de-a lungul axei „Z” și rotit în jurul axei „Y” (Figura 2c), adică. numărul de legături este de două - o pereche de clasa II. Un plan relativ la un alt plan se poate mișca translațional de-a lungul axelor „X” și „Y” și, de asemenea, se poate roti în jurul axei „Z” fără a perturba natura contactului. Imposibil mișcare înainte de-a lungul axei „Z” și mișcările de rotație în jurul axelor „X” și „Y” (Figura 2d). Astfel, numărul de legături este de trei - o pereche cinematică de clasa III.
Notă: dacă o pereche cinematică are două funcționale mișcările aferente(una nu poate exista fără cealaltă), ele dau un grad de libertate.
De exemplu, un șurub și o piuliță formează o pereche cinematică de clasa a cincea. În acest caz, există două mișcări ale piuliței cu un șurub fix - mișcare de rotație în jurul axei șurubului și mișcare de translație de-a lungul acestei axe, dar nu puteți deplasa piulița de-a lungul axei fără a o întoarce sau rotiți piulița astfel încât nu se deplasează de-a lungul axei. Mai mult, cunoscând parametrii filetului, este ușor de determinat relația dintre unghiul de rotație și mișcarea de translație a piuliței.
Aceste două mișcări formează o mișcare complexă (în acest caz, elicoidală). Ea determină un grad de libertate în mișcarea relativă a acestor legături, adică. numărul de link-uri este de cinci;
2) după natura contactului legăturilor legate într-o pereche cinematică. Pe această bază, perechile cinematice sunt împărțite în superioare și inferioare. Perechile superioare au un contact punctual sau liniar al legăturilor care alcătuiesc această pereche cinematică.
În perechea inferioară, legăturile sunt în contact unele cu altele de-a lungul unei suprafețe (într-un caz particular, de-a lungul unui plan).
Perechile cinematice inferioare au o capacitate portantă mai mare, tk. au o zonă mare de contact (în perechea superioară, aria de contact este teoretic egală cu zero, dar în realitate se obține datorită elementelor perechii cinematice - „pata de contact”). Dar în perechile inferioare, o suprafață alunecă față de celălalt în timpul funcționării, în timp ce în perechile superioare se poate produce atât alunecare, cât și rostogolire.
De regulă, rezistența la alunecare este mai mare decât rezistența la rulare a unei suprafețe față de alta, adică. pierderile prin frecare în perechea superioară (dacă se folosește doar rularea) sunt mai mici decât în perechea inferioară (prin urmare, pentru a crește coeficientul acțiune utilă lagărele de alunecare sunt de obicei înlocuite cu lagăre de rulare).
Perechile cinematice prezentate în figurile 2b și 2c sunt cele mai înalte, iar perechea din figura 2d este perechea cinematică cea mai joasă;
3) de-a lungul traiectoriei de mișcare a punctelor aparținând legăturilor care alcătuiesc perechea cinematică. Pe această bază, se disting perechile cinematice spațiale și plate.
Într-o pereche cinematică plată, toate punctele se mișcă într-un plan sau paralel, iar traiectoriile mișcării lor sunt curbe plate. În perechi spațiale, punctele se mișcă în planuri diferite și au traiectorii sub formă de curbe spațiale.
Un număr semnificativ de mecanisme utilizate în practică sunt mecanismele plate (conform clasificării lui I.I. Artobolevsky - mecanisme din a treia familie), prin urmare, este necesar să se ia în considerare mai detaliat perechile cinematice plate.
O legătură liberă plasată într-un plan are trei grade de libertate (mișcare de translație de-a lungul axelor de coordonate și mișcare de rotație în jurul unei axe perpendiculare pe planul dat). Astfel, plasarea unei verigi într-un plan îi ia trei grade de libertate (impune trei legături). Dar legătura acestei legături cu alta într-o pereche cinematică impune mai multe conexiuni mișcării relative (numărul minim este 1). Ca urmare, doar perechile cinematice pot exista pe plan, având două sau un grad de libertate în mișcare relativă.
Conform clasificării generale, acestea sunt cupluri din clasele a patra și a cincea. Cele mai simple perechi din clasa a cincea oferă o singură mișcare - rotațională sau translațională (o pereche cinematică rotațională în tehnologie se numește balama, o pereche de translație, prin analogie cu o legătură în mișcare translațională, este uneori numită și glisor).
Două grade de libertate în mișcare relativă pe un plan oferă de obicei două profile de contact (pe o diagramă cinematică, contact într-un punct; într-un mecanism real, aceasta poate fi o linie care este proiectată la un punct). Astfel, perechile cinematice plate din clasa a cincea (balamale și glisoare) sunt simultan perechi inferioare, iar perechile cinematice din clasa a patra sunt perechi superioare.
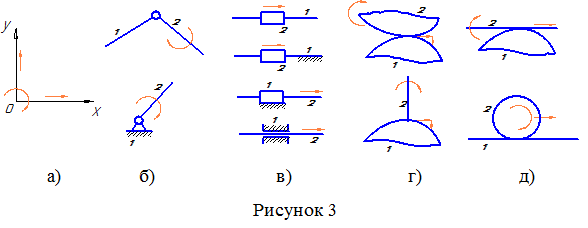
Figura 3 prezintă o reprezentare schematică a perechilor cinematice plate.
4) după natura închiderii legăturilor legate într-o pereche cinematică. Există două tipuri de perechi cinematice care diferă între ele în acest sens. Perechi cinematice cu închidere geometrică și perechi cinematice cu închidere forțată.
În perechi cu blocare pozitivă, configurația legăturilor împiedică separarea acestora în timpul funcționării. De exemplu, conectarea bielei la arborele cotit folosind un capac de biela sau orice alte balamale (ușă cu montant, fereastră cu toc de fereastră etc.).
În perechi cu un circuit de putere, contactul legăturilor în timpul funcționării este asigurat în mod constant forță activă. În figura 2, toate perechile cinematice sunt perechi cu forță de închidere, iar greutatea acționează ca forță de închidere. Dacă greutatea nu este suficientă, atunci, de obicei, diferite elemente elastice (cel mai adesea arcuri) sunt folosite pentru a crea o forță de presare.
Cuplu cinematic
conjugarea mobilă a două verigi solide, impunând restricţii asupra mişcării lor relative de către condiţiile de comunicare. Fiecare dintre condițiile de legătură elimină un grad de libertate ,
adică posibilitatea uneia dintre cele 6 mișcări relative independente în spațiu. Într-un sistem de coordonate dreptunghiulare, sunt posibile 3 mișcări de translație (în direcția a 3 axe de coordonate) și 3 mișcări de rotație (în jurul acestor axe). După numărul de condiţii de comunicare S K. p. sunt împărțite în 5 clase. Numărul de grade de libertate K. p. W=6-S. În cadrul fiecărei clase, articolele K. sunt împărțite în tipuri în funcție de mișcările relative posibile rămase ale legăturilor. După natura contactului legăturilor, K. p. inferioare se disting - cu contact de-a lungul suprafețelor, iar cele superioare - cu contact de-a lungul liniilor sau în puncte. Elementele K. mai mari sunt posibile pentru toate cele 5 clase și multe tipuri; inferior - doar 3 clase și 6 specii ( fig.1
). De asemenea, se face distincție între c.p. închisă geometric și neînchis. orez. unu
), iar în al doilea rând, este necesară o forță de presare pentru închidere, așa-numita. închidere forțată (de exemplu, într-un mecanism cu came). În mod convențional, cuplajele mobile cu mai multe elemente de rulare intermediare (de exemplu, rulmenți cu bile și cu role) și cu elemente deformabile intermediare (de exemplu, așa-numitele balamale fără joc ale dispozitivelor cu arcuri plate) sunt denumite k. orez. 2
). N. Ya. Niberg.
Mare enciclopedia sovietică. - M.: Enciclopedia Sovietică. 1969-1978 .
Vedeți ce este „perechea cinematică” în alte dicționare:
Conectarea a 2 verigi ale mecanismului, permițând mișcarea relativă a acestora. Perechea cinematică, în care legăturile ating suprafața, se numește cea inferioară (de exemplu, o balama rotativă, un glisor de translație și un ghidaj). Pereche cinematică, ...... Dicţionar enciclopedic mare
pereche cinematică- pereche Conectarea a două verigi alăturate, permițând mișcarea relativă a acestora. [Culegere de termeni recomandați. Problema 99. Teoria mecanismelor și mașinilor. Academia de Științe a URSS. Comitetul de terminologie științifică și tehnică. 1984] Teoria subiectelor ...... Manualul Traducătorului Tehnic- kinematinė pora statusas T sritis fizika atitikmenys: angl. pereche cinematică vok. kinematisches Elementenpaar, n rus. pereche cinematică, f pranc. paire cinématique, f … Fizikos terminų žodynas
Conectarea a două legături alăturate, permițându-le să fie legate. trafic. Suprafețe, linii, puncte, la care o legătură poate intra în contact cu o altă legătură, numită. elemente de legătură. K. p. sunt împărțite în inferioare (suprafețe de contact) și superioare ... ... Marele dicționar politehnic enciclopedic
pereche cinematică- pereche cinematică Conectarea a două corpuri rigide ale mecanismului, permițând mișcarea relativă dată a acestora. Cod IFToMM: 1.2.3 Secțiunea: CONCEPTE GENERALE ALE TEORIEI MECANISMELOR ȘI MAȘINILOR ... Teoria mecanismelor și mașinilor
pereche- pereche cinematică; pereche O conexiune a două legături învecinate, permițând deplasarea relativă de la acestea. două forțe; sistemul de cuplu doi forțe paralele, egală în valoare absolută și îndreptată în direcții opuse...
pereche de sus- O pereche cinematică în care mișcarea relativă necesară a legăturilor poate fi obținută numai prin atingerea elementelor sale de-a lungul liniilor și în puncte ... Dicționar terminologic explicativ politehnic
Natura mișcării relative a legăturilor permisă de perechea cinematică depinde de forma legăturilor la punctele lor de contact.
Setul de formulare posibile de puncte de contact pe fiecare dintre cele două linkuri element pereche cinematică. Un element al unei perechi cinematice poate fi punct , linia , suprafaţă.
Perechi cinematice al căror element punct sau linia , sunt numite superior ; perechi cinematice, al căror element suprafaţă , numit inferior .
În funcție de geometria uneia (sau a ambelor) legături de contact, se disting perechi cinematice: sferice, conice, cilindrice, plane, elicoidale.
După natura mișcării relative a legăturilor permise de perechea cinematică, există mișcare de rotație (B), translație (P), translație de rotație (B + P) și cu mișcare cu șurub a VP . Diferența dintre perechile de tip B + P și VP este că, în prima, mișcările relative (de rotație și translație) sunt independente, iar în a doua, o mișcare nu poate fi efectuată fără cealaltă.
Împreună cu perechile de legături care sunt în contact de-a lungul aceleiași suprafețe, linii sau punct, în practică sunt folosite perechile cu contact multiplu. Aceasta este fie o repetare a elementelor de interacțiune (cane, șurub cu pornire multiplă, perechi de angrenaje), fie utilizarea contactului simultan de-a lungul suprafeței și liniei (pereche sferică cu un știft), de-a lungul suprafețelor cilindrice și plane (pereche cu o cheie glisantă). ). Repetarea contactului dintre legături caracterizează echivalența perechilor de diferite tipuri. O pereche cu un contact în trei puncte poate fi echivalentă cu o pereche inferioară plană sau sferică în ceea ce privește natura mișcării legăturilor.
Pentru corp solid, mișcându-se liber în spațiu, numărul de grade de libertate (numărul de mișcări posibile ale sistemului mecanic independent unul de celălalt) este de șase: trei translație de-a lungul axelor X, Y, Zși trei de rotație în jurul acestor axe (Fig. 2.1 ).
Pentru legăturile incluse într-o pereche cinematică, numărul de grade de libertate este întotdeauna mai mic de șase, deoarece condițiile de contact (legături) reduc numărul de mișcări posibile ale unei legături față de alta: o legătură nu poate pătrunde în alta și nu se poate deplasa. departe de ea.
În cazul general, fiecare pereche cinematică impune legături S asupra mișcării relative a legăturilor, permițând H=6 - S mișcări relative ale legăturilor. În funcție de numărul de legături suprapuse S (gradele de libertate rămase H), se disting 5 clase de perechi cinematice. O astfel de clasificare a perechilor cinematice a fost propusă de I.I. Artobolevsky (tabelul 2.1)
Tabelele 2.2-2.4 prezintă exemple de proiectare a perechilor cinematice. Perechile prezentate în tabelele 2.2 și 2.4 sunt clasificate pe baza ipotezei că nu există frecare și deformare a legăturilor. Fricțiunea permite utilizarea perechilor separate în angrenajele de frecare. Dată fiind deformarea, perechile cu contact punctual pot fi transformate în perechi cu contact la suprafață.
Tabelul 2.1
Tipuri de perechi cinematice
Postat pe /
INTRODUCERE
1. Concepte și definiții de bază în teoria mecanismelor
3. Lanțuri cinematice
LITERATURĂ
INTRODUCERE
Tema lucrării de control este „Analiza structurală a mecanismelor” la disciplina „Teoria mecanismelor și mașinilor”.
Scopul lucrării: formarea cunoașterii analizei structurale a mecanismelor.
Obiectivele lucrării: să se familiarizeze cu principiile formării mecanismelor și sistemul de clasificare a acestora.
Principalele întrebări ale subiectului:
Concepte și definiții de bază în teoria mecanismelor;
Perechile cinematice și clasificarea lor;
Lanțuri cinematice;
Gradul de mobilitate al unui lanț cinematic plat;
Principiul formării mecanismelor.
Concepte și definiții de bază în teoria mecanismelor
Teoria mecanismelor și mașinilor studiază structura, cinematica și dinamica mecanismelor și mașinilor.
Un mecanism este un sistem creat artificial de corpuri conceput pentru a transforma mișcarea unuia sau a mai multor corpuri în mișcările necesare ale altor corpuri.
Corpurile solide care alcătuiesc mecanismul se numesc legături.
Fiecare parte mobilă sau grup de părți care formează un sistem mobil rigid de corpuri se numește veriga mobilă a mecanismului.
Toate piesele fixe formează un sistem fix rigid de corpuri, numită legătură fixă sau rack.
Prin urmare, orice mecanism are o legătură fixă și una sau mai multe legături mobile.
Legătura a două legături de contact, permițând mișcarea relativă a acestora, se numește pereche cinematică.
Suprafețele, liniile, punctele unei legături, de-a lungul cărora aceasta poate intra în contact cu o altă legătură, formând o pereche cinematică, se numesc elemente de legătură.
Un sistem conectat de legături care formează perechi cinematice între ele se numește lanț cinematic.
Mecanism - există un lanț cinematic folosit pentru a efectua mișcarea necesară.
Mecanismele care compun mașina sunt variate. Din punctul de vedere al scopului lor funcțional, mecanismele mașinii sunt împărțite în următoarele tipuri:
a) mecanisme ale motoarelor și convertoarelor:
mecanismele motoarelor convertesc diferite tipuri de energie în lucru mecanic;
mecanismele convertoare realizează transformarea muncii mecanice în alte tipuri de energie;
b) mecanisme de transmisie care transferă mișcarea de la motor la mașina tehnologică sau la organul executiv;
c) actuatoare care afectează direct mediul sau obiectul prelucrat;
d) mecanisme de management, control și reglare care controlează procesul tehnologic, controlul etc.;
e) mecanisme de numărare, cântărire și ambalare automate utilizate la mașinile care produc produse în masă.
2. Perechile cinematice și clasificarea lor
Proprietatea principală a unei perechi este numărul de parametri geometrici care pot fi utilizați pentru a determina poziția relativă a legăturilor conectate. De exemplu, atunci când atingeți suprafața de revoluție, poziția relativă a legăturilor este complet determinată prin setarea unui singur parametru - unghiul de rotație relativă a legăturilor în planul perpendicular pe axa de rotație.
Când atingeți o suprafață sferică, există deja trei astfel de parametri - acestea sunt unghiurile de rotație în jurul a trei axe reciproc perpendiculare care se intersectează în centrul sferei.
În consecință, elementele perechii cinematice impun unele restricții asupra mișcării relative a legăturilor, legând într-un anumit fel coordonatele punctelor ambelor legături.
Constrângerile impuse de elementele unei perechi cinematice asupra mișcării relative a legăturilor care formează perechea se numesc constrângeri, iar controalele care exprimă aceste constrângeri se numesc ecuații de constrângere.
Să luăm în considerare ce legături și în ce cantitate pot fi impuse mișcării relative a legăturilor unei perechi cinematice.
După cum se știe, în cazul general, orice corp absolut rigid care se mișcă liber în spațiu are șase grade de libertate:
trei rotații în jurul axelor X, Y, Z și trei mișcări de translație de-a lungul acelorași axe.
Constrângerile impuse mișcării relative a unei legături a unei perechi cinematice limitează aceleași mișcări relative posibile pe care legăturile le au în stare liberă.
Ca urmare a acestor restricții, unele dintre cele șase mișcări relative posibile ale unei legături care se mișcă liber devin legate de aceasta. Mișcările posibile independente rămase determină numărul de grade de libertate al legăturilor perechii cinematice în mișcarea lor relativă.
Perechile cinematice, în funcție de numărul de condiții de conectare impuse mișcării relative a legăturilor sale, sunt împărțite în cinci clase:
O pereche de clasa I - (Fig. 1 a) o pereche cu cinci mișcări, are un număr de grade de libertate a legăturilor egal cu cinci și un număr de condiții de conectare egal cu 1;
O pereche de clasa II - (Fig. 1b) o pereche cu patru mișcări, numărul de grade de libertate al legăturii perechii cinematice este de patru, numărul de condiții de conectare este 2;
O pereche de clasa III - (Fig. 1 c, i, d) o pereche cu trei mișcări, numărul de grade de libertate al legăturii perechii cinematice este de trei, numărul de condiții de conectare este de 3;
O pereche de clasa IV - (Fig. 1 e, i, f) o pereche cu două mișcări, numărul de grade de libertate al legăturii este 2, numărul de condiții de conectare este 4;
O pereche de clasă V este (Fig. 1 g, h. i) o singură mișcare (pereche rotativă), numărul de grade de libertate al legăturii este egal cu unul, numărul de condiții de conectare este 5.
Perechile cinematice sunt împărțite în spațiale și plate. Perechile cinematice spațiale sunt perechi ale căror puncte de legătură în mișcare relativă descriu curbele spațiale. Perechile cinematice plane se numesc astfel de perechi, punctele ale căror legături se mișcă în mișcare relativă în planuri paralele, adică. traiectoriile lor sunt curbe plane. În ingineria mecanică modernă, mecanismele plate, ale căror legături sunt incluse în perechi de clase IV și V, sunt utilizate pe scară largă.
Perechile cinematice diferă și prin natura contactului legăturilor. Dacă elementele unei perechi cinematice sunt astfel încât la fiecare poziție relativă a legăturilor au contact pe suprafață, atunci perechea se numește cea mai joasă. Dacă atingerea are loc în puncte separate sau de-a lungul liniilor, atunci perechea se numește cea mai înaltă.
Odată cu mișcarea relativă a legăturilor care formează perechea inferioară, suprafețele contactului lor alunecă una peste alta. Dacă legăturile formează o pereche mai înaltă, atunci mișcarea lor relativă poate avea loc atât cu alunecarea elementelor perechii, cât și fără aceasta - prin rulare.
3. Lanțuri cinematice
Lanțurile cinematice în funcție de natura mișcării relative a verigilor sunt împărțite în plane și spațiale. Un lanț cinematic se numește plat dacă punctele legăturilor sale descriu traiectorii situate în planuri paralele. Un lanț cinematic se numește spațial dacă punctele legăturilor sale descriu traiectorii neplanare sau traiectorii situate în planuri care se intersectează.
După tipul de verigi incluse în lanțurile cinematice, acestea din urmă sunt împărțite în simple și complexe.
Un lanț simplu este un astfel de lanț în care fiecare verigă este inclusă în cel mult două perechi cinematice (Fig. 2).
Un lanț cinematic complex este un lanț în care există cel puțin o verigă inclusă în mai mult de două perechi cinematice (Fig. 3).
Fig.2 Fig.3
Un lanț cinematic se numește închis, fiecare verigă din care este inclusă în două sau mai multe perechi cinematice.
Un lanț cinematic deschis este un lanț cinematic în care există legături incluse într-o singură pereche cinematică.
Cu un număr egal de zale mobile, lanțurile închise au mai puține grade de libertate decât cele deschise. Circuitele închise sunt utilizate pe scară largă în circuitele cinematice ale mașinilor de lucru, mașinilor-unelte, mașinilor automate etc., circuitelor deschise - în circuitele manipulatoarelor și roboților.
La mașini se folosesc de obicei astfel de lanțuri cinematice, în care una dintre verigi este nemișcată, adică. este un stand. De exemplu, în mecanismul unui motor cu ardere internă, manivela, biela, pistonul și cilindrul formează un lanț cinematic, în care cilindrul cu cadrul motorului este o verigă fixă (rack) (Fig. 4 a, b).
Legătura mecanismului, care este afectată de forțele externe care îl pun în mișcare, se numește verigă principală. Veragă la care se aplică rezistențe utile, de dragul depășirii pe care este construit mecanismul, se numește verigă condusă.
Fig.4 a Fig.4 b
Când se studiază cinematica mecanismului, mișcarea uneia dintre verigi este considerată dată. Se numește intrare. Legătura, a cărei mișcare doresc să o determine în funcție de mișcarea intrării, se numește ieșire. În exemplul nostru, glisorul este legătura de ieșire, manivela este legătura de intrare.
4. Gradul de mobilitate al unui lanț cinematic plat
mecanism de plat cu lanț cinematic de abur
Fiecare corp liber în timpul mișcării plan-paralel are trei grade de libertate, prin urmare, înainte de a conecta legăturile K în perechi cinematice, toate aveau 3K grade de libertate.
La conectarea legăturilor în perechi cinematice, acestea din urmă le iau un anumit număr de grade de libertate: perechile din clasa a V-a în mecanisme plate iau două grade de libertate (din trei), lăsând unul; perechile de clasa IV iau un grad de libertate, lăsând doi.
Astfel, un lanț cinematic plat va avea următorul grad de libertate:
H = 3K - 2p1 - p2
Dacă o verigă a lanțului cinematic este fixată, atunci numărul de grade de libertate va scădea cu alte trei și, raportat la verigă fixă, va fi egal cu:
W = H - 3 sau W = 3(k-1) - 2p1 - p2
Notând k - 1 \u003d n (numărul de link-uri în mișcare), obținem în sfârșit:
W = 3n - 2p1 - p2
n este numărul de verigi mobile ale lanțului cinematic;
p1 - numărul de perechi mai mari (suprapune o condiție de conectare);
p2 este numărul de perechi inferioare din lanțul cinematic (impunând câte două condiții de conectare).
Așadar, lanțul cinematic al motorului are 3 verigi mobile, 3 perechi de rotație și 1 pereche de translație, în total 4 perechi inferioare. Deci pentru ea
W = 3 3 - 2 4 =1
Numărul de grade de libertate ale lanțului cinematic în raport cu veriga fixă W se numește gradul de mobilitate al lanțului cinematic.
Formula pentru determinarea gradului de mobilitate a lanțului cinematic a fost obținută pentru prima dată de celebrul om de știință rus P.L. Cebyshev în 1869 și îi poartă numele. Această formulă este potrivită numai pentru lanțurile cinematice plane.
Având în vedere diferite combinații ale acestor numere, se pot obține grupuri de diferite tipuri. Toate grupele obținute în acest fel pot fi împărțite în clase.
Luați în considerare clasificarea structurală a mecanismelor plate.
Să numim condiționat legătura principală și rack, care formează o pereche cinematică de clasa V, mecanism de clasa I (Fig. 5).
Formarea oricărui mecanism plan poate fi reprezentată ca o atașare secvențială a unor grupuri de legături care îndeplinesc condiția W = 0 la mecanismul inițial.
link principal link principal
Fig.5
De exemplu, primul grup (Fig. 6.a) este atașat la un mecanism de clasa I (leading link and rack), următorul grup este fie conectat la legăturile primului grup, fie parțial la legăturile primului grup și legătura principală sau către rack etc.
Mecanismele formate prin atașarea mai multor grupuri la un mecanism de clasa I, ca și mecanismul în sine, au un grad de mobilitate egal cu unul, deoarece grupurile nu modifică gradul de mobilitate al mecanismului la care sunt atașate.
Mecanismele pot fi formate și prin alăturarea grupurilor simultan la mai multe mecanisme de clasa I (Fig. 6.b). In aceste cazuri, gradul de mobilitate al mecanismelor obtinute va fi egal cu numarul de mecanisme de clasa I la care sunt atasate astfel de grupuri, i.e. numărul de verigi conducătoare ale mecanismului rezultat.
a) 2 - veriga principală b) 2 și 5 - verigi conducătoare
Orez. 6
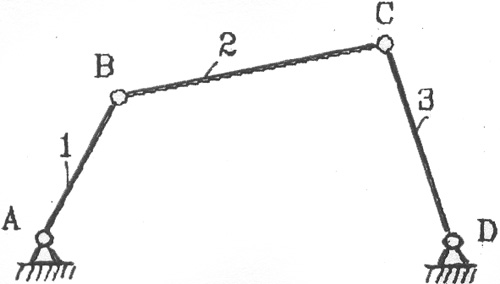
Un grup de legături (Fig. 7), care are două legături și trei perechi de clasa V, se numește grup de clasa II de ordinul doi sau grup Assur cu două conductoare. (Acest grup este conectat la mecanismul principal prin două lese BC și CD).
Ordinea grupului este determinată de numărul de elemente cu care grupul este atașat la mecanismul principal.
Mecanismele, care includ grupuri de clase nu mai mari decât a doua, sunt numite mecanisme de clasa a II-a.
Fig.7
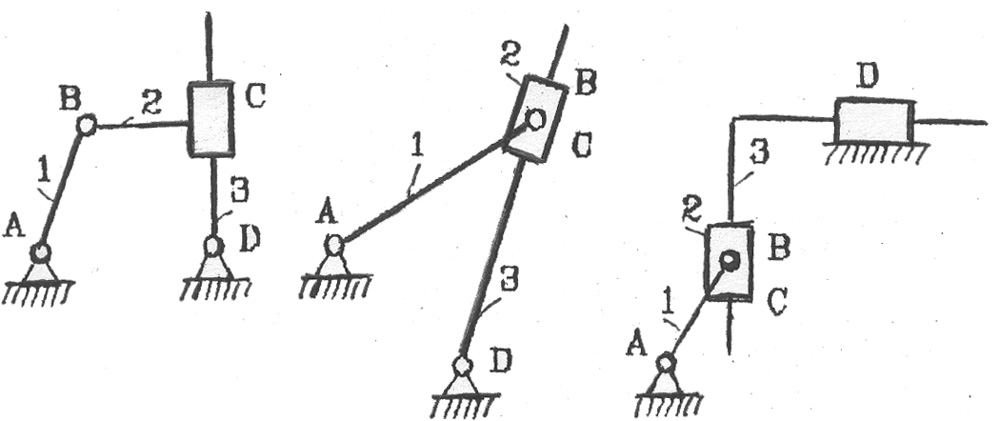
Toate tipurile ulterioare de clasa grupa II pot fi obținute prin înlocuirea perechilor rotative individuale cu perechi translaționale.
Al doilea tip este cel în care una dintre perechile de rotație extremă este înlocuită cu o pereche de translație (Fig. 8).
Orez. opt
Al treilea tip - perechea de translație este înlocuită cu perechea de rotație mijlocie (Fig. 9).
A patra vedere - două perechi de rotație extremă sunt înlocuite cu două perechi de translație (Fig. 10).
Fig.10
Al cincilea tip - perechile translaționale sunt înlocuite cu perechi rotaționale extreme și medii (Fig. 11).
Fig.11
Astfel, în mecanismele plate cu perechi rotaționale, translaționale și superioare de clase IV și V, există cinci grupe de clasa II. Majoritatea mecanismelor moderne utilizate în tehnologie aparțin mecanismelor de clasa a II-a.
Să luăm acum în considerare a doua combinație posibilă a numerelor de legături și a perechilor cinematice. Următorul grup în ceea ce privește numărul de legături ar trebui să conțină patru legături și șase perechi de clasa V (Fig. 12). Pentru această combinație se pot obține trei tipuri de lanțuri cinematice ale căror principii structurale de formare sunt diferite.
Primul lanț cinematic este un lanț cinematic deschis mai complex și este un grup de clasa a III-a de ordinul al treilea și se numește grup cu trei derivații.
Fig.12
Legătura EFC este legătura de bază.
Mecanismele, care includ grupuri nu mai mari decât grupurile de ordinul III clasa III, sunt numite mecanisme de clasa III (Fig. 13).
Fig.13
Al doilea lanț cinematic este un lanț cinematic închis, care este atașat de verigile „k” și „m” ale mecanismului principal nu prin elemente ale leselor, ci prin elementele libere B și G aparținând verigilor de bază (Fig. 14). ).
Fig.14
Acest grup, în plus față de două unități de bază BCD și EGF, care formează două bucle închise rigide, are o buclă închisă mobilă pe patru laturi CEFD (Fig. 15).
Grupurile care includ circuite mobile cu patru laturi închise sunt clasificate ca grupuri de clasa IV.
Al treilea tip de lanț cinematic: acest lanț se împarte în două grupe simple de clasa a II-a - BCD și EFG - și, prin urmare, aparține celor considerate anterior și nu reprezintă nimic fundamental nou (Fig. 16).
 Orez. 1.15 Fig.1.16
Orez. 1.15 Fig.1.16
Prin urmare, grupul de clasa a II-a include un circuit unilateral, grupul de clasa a III-a include un circuit închis cu trei părți, iar grupul de clasa a IV-a include un circuit închis cu patru părți. Toate grupurile luate în considerare sunt obținute prin modificări corespunzătoare în structura contururilor.
LITERATURĂ
Artobolevsky I.I. Teoria mecanismelor și mașinilor. M, 1975, p. 48-90.
Lucru la mașina de cusut. Construirea unei scheme cinematice și a traiectoriilor punctelor de lucru ale mecanismelor de preluare a acului și a firului. Determinarea vitezelor și accelerațiilor legăturilor mecanismelor de preluare a acului și a firului, realizarea unui plan de accelerare. Analiza forțelor mecanismelor.
Analiză structurală, construirea pozițiilor mecanismului și a planurilor de viteză pentru lucru și miscare inactiv, pozițiile extreme superioare și inferioare. Construirea planurilor de accelerare, calculul kinetostatic al mecanismului. Determinarea forțelor de inerție și a forțelor de gravitație ale legăturilor.
Studiul structural și cinematic al mecanismului: descrierea schemei; construirea planurilor de viteză. Determinarea reacțiilor în perechi cinematice; calculul forței verigii conducătoare de către N.E. Jukovski. Sinteza mecanismului de angrenare și came.
Calculul dimensiunilor și parametrilor mecanismului de pârghie. Construirea unei diagrame de momente reduse de inerție, momente reduse de forțe, lucru forţe motriceși forțe de rezistență, schimbări energie kinetică. Caracteristicile legii mișcării în faza de apropiere.
Analiza structurală a mecanismului manivelă-glider, identificarea compoziției sale structurale. Sinteza schemei cinematice. Analiza cinematică mecanism plat. Determinarea forțelor care acționează asupra legăturilor mecanismului. Metoda kinetostatică de analiză a forțelor.
Concepte de bază și definiție de mașini, mecanisme, legături și perechi cinematice. grupuri asiriene. Calculul numărului de grade de libertate ale mecanismelor plate și spațiale, analiza structurii mecanismelor cu pârghie plate. Conexiuni pasive și exces de mobilitate.
Schema cinematică a mecanismului mecanismului manivelă-echilibrator. Poziția inițială a verigii principale. Diagrame cinematice, planuri de viteză și accelerație. Determinarea momentului de echilibrare pe manivela de antrenare, verificare prin metoda pârghiei Jukovski.
Dispozitivul, principiul de funcționare și scopul mașinii de crestat. Analiza cinematică și alegerea motorului electric. Determinarea punctului de aplicare și a direcției forței de echilibrare. Construirea diagramei de schimbare a energiei cinetice și a vitezei reale.
Calculul toleranțelor pentru verigile componente ale lanțului dimensional, furnizând valoarea verigii de închidere date a cutiei de viteze TsD2-35-VM în limitele stabilite de sarcină. Efectuarea calculelor prin metode: maxim-minim, probabilistice si reglare.
Schema cinematică a mecanismului articulat. Determinarea lungimii scenei și a factorului de scară al lungimii. Construirea unui plan de poziție a mecanismului pentru o anumită poziție a manivelei folosind metoda serif. Construirea unui plan de viteză. Calculul accelerației unghiulare a culisei.
Informații de bază despre mașini și mecanisme. Energie și grupuri de lucru ale mașinilor. Conceptele de transmisie mecanică, de antrenare și de arbore condus. Raportul de transmisie al curelei și transmisiei cu viteze. Sistem plat de forțe. Distribuția tensiunilor în timpul torsiunii.
Analiza structurală, dinamică și kinetostatică a unui mecanism de pârghie plată. Determinarea vitezelor unghiulare ale legăturilor sale; forțe externeși momentele de inerție care acționează asupra fiecărei legături și perechi cinematice. Calculul de proiect al mecanismului de rezistență.
O pereche cinematică este o conexiune mobilă a două legături învecinate care le asigură o anumită mișcare relativă. Elementele unei perechi cinematice sunt un set de suprafețe de linii sau puncte de-a lungul cărora are loc o conexiune mobilă a două legături și care formează o pereche cinematică. Pentru ca o pereche să existe, elementele legăturilor sale constitutive trebuie să fie în contact constant T.
Distribuiți munca pe rețelele sociale
Dacă această lucrare nu vă convine, există o listă de lucrări similare în partea de jos a paginii. De asemenea, puteți utiliza butonul de căutare
Cursul 2
Oricare ar fi mecanismul mașinii, acesta constă întotdeauna numai din legături și perechi cinematice.
Condițiile de conectare impuse în mecanismele pe verigile mobile, în teoria mașinilor și a mecanismelor Se obișnuiește să se numească perechi cinematice.
Cuplu cinematicnumită conexiune mobilă a două legături învecinate, asigurându-le o anumită mișcare relativă.
În tabel. 2.1 prezintă denumirile, desenele, simbolurile celor mai comune perechi cinematice în practică, precum și clasificarea acestora.
Legăturile, atunci când sunt combinate într-o pereche cinematică, pot intra în contact unele cu altele de-a lungul suprafețelor, liniilor și punctelor.
Elementele unei perechi cinematiceei numesc un set de Suprafețe, linii sau puncte de-a lungul cărora are loc o legătură mobilă a două legături și care formează o Pereche cinematică. În funcție de tipul de contact al elementelor perechilor cinematice, există mai sus și mai jos perechi cinematice.
Se numesc perechi cinematice formate din elemente sub forma unei linii sau a unui punct mai înalt .
Se numesc perechi cinematice formate din elemente sub formă de suprafețe inferior.
Pentru ca o pereche să existe, elementele legăturilor sale constitutive trebuie să fie în contact constant, adică. fi închis. Închiderea perechilor cinematice poate figeometric sau cu forță, De exemplu, cu ajutorul propriei mase, arcuri etc.
Rezistența, rezistența la uzură și durabilitatea perechilor cinematice depind de tipul și designul acestora. Perechile inferioare sunt mai rezistente la uzură decât cele superioare. Acest lucru se explică prin faptul că, în perechile inferioare, contactul elementelor perechilor are loc de-a lungul suprafeței și, prin urmare, cu aceeași sarcină, în ea apar presiuni specifice mai mici decât în cea superioară. Uzura, ceteris paribus, este proporțională cu presiunea specifică și, prin urmare, Perechile inferioare se uzează Mai lent decât cele superioare. Prin urmare, pentru a reduce uzura mașinilor, este de preferat să se utilizeze perechi inferioare, totuși, adesea, utilizarea perechilor cinematice superioare face posibilă simplificarea semnificativă a diagramelor structurale ale mașinilor, ceea ce reduce dimensiunile acestora și simplifică proiectarea. Prin urmare, alegerea corectă a perechilor cinematice este o problemă complexă de inginerie.
Perechile cinematice sunt, de asemenea, împărțite lanumărul de grade de libertate(mobilitate), pe care îl pune la dispoziția legăturilor conectate prin intermediul acestuia, saunumărul de condiții de legătură(clasa de perechi), impuse de pereche asupra mișcării relative a legăturilor legate. Atunci când folosesc o astfel de clasificare, dezvoltatorii de mașini primesc informații despre posibilele mișcări relative ale legăturilor și despre natura interacțiunii factorilor de forță dintre elementele unei perechi.
Un link gratuit care este în cazul general în M - spaţiu dimensional, permiţând P tipuri de mișcări cele mai simple, are un număr de grade de libertate! ( H) sau W - mobil.
Deci, dacă legătura este în spațiu tridimensional, permițând șase tipuri de mișcări simple - trei de rotație și trei de translație în jurul și de-a lungul axelor X, V, Z , atunci spunem că are șase grade de libertate, sau are șase coordonate generalizate, sau este șase mobilă. Dacă legătura se află într-un spațiu bidimensional care permite trei tipuri de mișcări simple - o rotație în jur Z și două translaționale de-a lungul axelor X și Y , apoi se spune că are trei grade de libertate, sau trei coordonate generalizate, sau este tri-mobilă etc.
Tabelul 2.1
Când legăturile sunt combinate folosind perechi cinematice, ele își pierd gradele de libertate. Aceasta înseamnă că perechile cinematice impun legăturile pe care le conectează printr-un număr S.
În funcție de numărul de grade de libertate pe care legăturile combinate într-o pereche cinematică le au în mișcare relativă, se determină mobilitatea perechii ( L = H ). Dacă H este numărul de grade de libertate ale legăturilor perechii cinematice în mișcare relativă, la mobilitatea perechilor este determinată după cum urmează:
unde P - mobilitatea spatiului in care exista perechea luata in considerare; S - numărul de obligaţiuni impuse de pereche.
Trebuie remarcat faptul că mobilitatea unei perechi W , definit de (2.1), nu depinde de tipul de spațiu în care este implementat, ci doar de construcție.
De exemplu, o pereche de rotație (translațională) (a se vedea tabelul 2.1), atât în spațiu mobil de șase, cât și de trei, va rămâne în continuare unică mobilă, în primul caz i se vor impune 5 legături, iar în al doilea caz - 2 legături, și, deci vom avea, respectiv:
pentru șase spațiu mobil:
pentru un spațiu mobil cu trei:
După cum puteți vedea, mobilitatea perechilor cinematice nu depinde de caracteristicile spațiului, ceea ce este un avantaj al acestei clasificări. Dimpotrivă, împărțirea frecventă a perechilor cinematice în clase are de suferit din cauza faptului că clasa perechii depinde de Caracteristicile spațiului, ceea ce înseamnă că aceeași pereche în spații diferite are o clasă diferită. Acest lucru este incomod pentru scopuri practice, ceea ce înseamnă că o astfel de clasificare a perechilor cinematice este irațională, deci este mai bine să nu o folosiți.
Este posibil să alegeți o astfel de formă a elementelor unei perechi, astfel încât, cu o mișcare elementară independentă, să apară o a doua - un dependent (derivat). Un exemplu de astfel de pereche cinematică este un șurub (Tabelul 2. 1) . În această pereche, mișcarea de rotație a șurubului (piuliță) determină mișcarea sa de translație de-a lungul axei. O astfel de pereche ar trebui să fie atribuită uneia cu o singură mișcare, deoarece în ea se realizează doar o singură mișcare independentă, cea mai simplă.
Conexiuni cinematice.
Perechile cinematice date în tabel. 2.1, simplu și compact. Ele implementează aproape toate cele mai simple mișcări relative ale legăturilor necesare pentru crearea mecanismelor. Cu toate acestea, atunci când se creează mașini și mecanisme, acestea sunt rareori utilizate. Acest lucru se datorează faptului că forțe mari de frecare apar de obicei în punctele de contact ale legăturilor care formează o pereche. Acest lucru duce la uzura semnificativă a elementelor perechii și, prin urmare, la distrugerea acesteia. Prin urmare, cel mai simplu lanț cinematic cu două legături al unei perechi cinematice este adesea înlocuit cu lanțuri cinematice mai lungi, care împreună implementează aceeași mișcare relativă a legăturilor ca și perechea cinematică înlocuită.
Un lanț cinematic conceput pentru a înlocui o pereche cinematică se numește conexiune cinematică.
Să dăm exemple de lanțuri cinematice, pentru cele mai comune în practică perechile cinematice rotaționale, translaționale, elicoidale, sferice și plan-plan.
Din Tabel. 2.1 se poate observa că cel mai simplu analog al unei perechi cinematice rotative este un rulment cu elemente de rulare. De asemenea, ghidajele cu role înlocuiesc perechea liniară și așa mai departe.
Conexiunile cinematice sunt mai convenabile și mai fiabile în funcționare, rezistă la forțe (momente) mult mai mari și permit mecanismelor să funcționeze la viteze relative mari ale legăturilor.
Principalele tipuri de mecanisme.
Mecanismul poate fi văzut ca caz special un lanț cinematic în care cel puțin o verigă este transformată într-un rack, iar mișcarea verigilor rămase este determinată de mișcarea specificată a verigilor de intrare.
Trăsăturile distinctive ale lanțului cinematic, reprezentând mecanismul, sunt mobilitatea și siguranța mișcării legăturilor sale față de cremalieră.
Un mecanism poate avea mai multe legături de intrare și o legătură de ieșire, caz în care se numește mecanism de însumare și, invers, o legătură de intrare și mai multe legături de ieșire, atunci se numește mecanism de diferențiere.
Mecanismele sunt împărțite înghidaje și transmisie.
mecanism de transmisienumit un dispozitiv conceput pentru a reproduce o anumită relație funcțională între mișcările legăturilor de intrare și de ieșire.
mecanism de ghidareei numesc un mecanism în care traiectoria unui anumit punct al unei legături care formează perechi cinematice cu numai legături în mișcare coincide cu o curbă dată.
Luați în considerare principalele tipuri de mecanisme care au găsit o largă aplicație în tehnologie.
Se numesc mecanisme ale căror legături formează doar perechile cinematice inferioarepârghie-articulată. Aceste mecanisme sunt utilizate pe scară largă datorită faptului că sunt durabile, fiabile și ușor de operat. Principalul reprezentant al unor astfel de mecanisme este articulația cu patru verigi (Fig. 2.1).
Numele mecanismelor sunt de obicei determinate de numele legăturilor lor de intrare și ieșire sau de legătura caracteristică inclusă în componența lor.
În funcție de legile mișcării legăturilor de intrare și de ieșire, acest mecanism poate fi numit crank-rocker, double crank, dublu rocker, rocker-crank.
Bratul articulat cu patru brațe este utilizat în construcția de mașini-unelte, fabricarea de instrumente, precum și în utilaje agricole, alimentare, plug de zăpadă și alte mașini.

Dacă înlocuim o pereche de rotație într-o articulație cu patru articulații, de exemplu D , la translație, atunci obținem binecunoscutul mecanism manivelă-glider (Fig. 2.2).
Orez. 2.2. Diferite tipuri de mecanisme cu manivelă:
1 manivelă 2 - biela; 3 - glisor
Mecanismul crank-slider (slider-crank) este utilizat pe scară largă în compresoare, pompe, motoare combustie internași alte mașini.
Înlocuirea unei perechi de rotație într-o articulație cu patru articulații DIN la translație, obținem un mecanism basculant (Fig. 2.3).
Pe p și c .2.3, în mecanismul basculant se obține dintr-o articulație cu patru articulații prin înlocuirea perechilor de rotație în acesta Pot face pentru progresiv.
Mecanismele balansoare și-au găsit o largă aplicație în mașinile de rindeluit datorită proprietății lor inerente de asimetrie de lucru și de mers în gol. De obicei au o cursă de lucru lungă și o cursă rapidă în gol care asigură revenirea frezei în poziția inițială.
Orez. 2.3. Diferite tipuri de mecanisme balansoare:
1 manivela; 2 piatră; 3 aripi.
Mecanismele balamale-pârghie au găsit o mare utilizare în robotică (Fig. 2.4).
Particularitatea acestor mecanisme este că au un numar mare grade de libertate, ceea ce înseamnă că au multe unități. Funcționarea coordonată a acționărilor legăturilor de intrare asigură deplasarea gripperului de-a lungul unei traiectorii raționale și către un loc dat din spațiul înconjurător.
Aplicație pe scară largă în ingineriemecanisme cu came. Cu ajutorul mecanismelor cu came, este din punct de vedere structural cel mai simplu mod de a obține aproape orice mișcare a verigii antrenate conform unei anumite legi,
Există în prezent număr mare varietăți de mecanisme cu came, dintre care unele sunt prezentate în Fig. 2.5.

Legea necesară de mișcare a legăturii de ieșire a mecanismului cu came este realizată prin conferirea legăturii de intrare (camă) a unei forme adecvate. Cama poate efectua rotație (Fig. 2.5, a, b ), translațional (Fig. 2.5, c, g ) sau mișcare complexă. Legătura de ieșire, dacă face o mișcare de translație (Fig. 2.5, a, în ), numit împingător, iar dacă se balansează (Fig. 2.5, G ) - rocker. Pentru a reduce pierderile prin frecare în perechea cinematică superioară LA utilizați o rolă de legătură suplimentară (Fig. 2.5, G).
Mecanismele cu came sunt utilizate atât în mașinile de lucru, cât și în diferite tipuri de dispozitive de comandă.
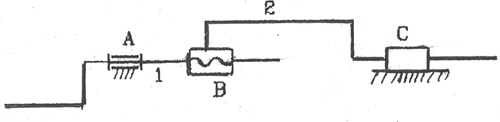
Foarte des, în mașinile de tăiat metale, prese, diverse instrumente și dispozitive de măsurare, se folosesc mecanisme cu șurub, dintre care cel mai simplu este prezentat în fig. 2.6:
Orez. 2.6 Mecanism cu șuruburi:
1 - șurub; 2 - nuca; A, B, C - perechi cinematice
Mecanismele cu șurub sunt de obicei utilizate acolo unde este necesar să se transforme mișcarea de rotație în mișcare de translație interdependentă sau invers. Interdependența mișcărilor este stabilită prin selectarea corectă a parametrilor geometrici ai perechii de șuruburi LA .
Pană mecanismele (Fig. 2.7) sunt utilizate în alt fel dispozitive de prindere și dispozitive de fixare în care este necesar să se creeze o forță mare de ieșire cu forțe de intrare limitate. O caracteristică distinctivă a acestor mecanisme este simplitatea și fiabilitatea designului.
Mecanismele în care transferul mișcării între corpurile în contact se realizează datorită forțelor de frecare se numesc frecare. Cele mai simple mecanisme de frecare cu trei brațe sunt prezentate în fig. 2.8

Orez. 2.7 Mecanism cu pană:
1, 2 - legături; L, V, C - sărbători cinematice.

Orez. 2.8 Mecanisme de frecare:
A - mecanism de frecare cu axe paralele; b - mecanism de frecare cu axe care se intersectează;în - mecanism de frecare cu cremalieră și pinion; 1 - rola de intrare (roata);
2 rola de iesire (roata); 2" - șină
Datorită faptului că legăturile 1 și 2 atașate unul de celălalt, de-a lungul liniei de contact dintre ele, ia naștere o forță de frecare, care trage legătura condusă împreună cu ea 2 .
Angrenajele de fricțiune sunt utilizate pe scară largă în dispozitive, unități de bandă, variatoare (mecanisme cu control lin al vitezei).
Pentru transmisie mișcare de rotație conform unei legi date, între arbori cu axe paralele, care se intersectează și se intersectează sunt utilizate diferite tipuri de angrenaje mecanisme . Cu ajutorul angrenajelor, este posibil să transferați mișcarea atât între arbori cuaxe fixe, asa cu deplasându-se în spațiu.
Mecanismele angrenate sunt folosite pentru a schimba frecvența și direcția de rotație a legăturii de ieșire, însumarea sau separarea mișcărilor.

Pe fig. 2.9 prezintă principalii reprezentanți ai angrenajelor cu axe fixe.
Fig 2.9. Transmisii cu axe fixe:
a - cilindric; b - conic; în - sfârșit; g - rack;
1 - angrenaj; 2 - angrenaj; 2 * șină
Cea mai mică dintre cele două angrenaje se numește unelte și multe altele - roată dințată.
Cremaliera este un caz special al unei roți dințate în care raza de curbură este egală cu infinitul.

Dacă trenul de viteze are angrenaje cu axe mobile, atunci acestea se numesc planetare (Fig. 2.10):
Angrenajele planetare, însă, în comparație cu angrenajele cu axe fixe, permit transferul de putere și rapoarte de transmisie mai mari cu un număr mai mic de trepte. Ele sunt, de asemenea, utilizate pe scară largă în crearea mecanismelor de însumare și diferențială.
Transmiterea mișcărilor între axele care se intersectează se realizează cu ajutorul unui angrenaj melcat (Fig. 2.11).

Un angrenaj melcat se obține dintr-o transmisie șurub-piuliță prin tăierea longitudinală a piuliței și plierea ei de două ori în planuri reciproc perpendiculare. Angrenajul melcat are proprietatea de autofrânare și vă permite să implementați rapoarte mari de transmisie într-o singură etapă.
Orez. 2.11. Unelte melcate:
1 - vierme, 2 - roată melcă.
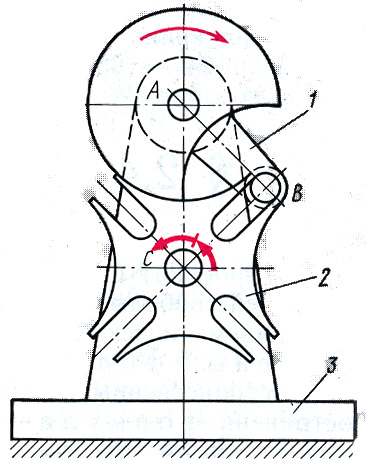
Mecanismele de viteză cu mișcare intermitentă includ și mecanismul în cruce malteză. Pe fig. З-Л „2. arată mecanismul „crucii malteze” cu patru lame.
Mecanismul „crucii malteze” transformă rotația continuă a parului principal - manivelă 1 cu un felinar 3 în rotația intermitentă a „crucii” 2, felinar 3 intră fără impact în şanţul radial al „crucii”. 2 și o întoarce spre colțul unde z este numărul de caneluri.
Pentru a efectua mișcarea într-o singură direcție, se folosesc mecanisme cu clichet. Figura 2.13 prezintă un mecanism cu clichet, constând dintr-un culbutor 1, o roată cu clichet 3 și clichete 3 și 4.

Când balansezi balansoarul 1 câine legănător 3 conferă rotație roții cu clichet 2 numai la deplasarea culbutorului în sens invers acelor de ceasornic. Pentru a ține roata 2 de la rotația spontană în sensul acelor de ceasornic atunci când balansoarul se mișcă împotriva cronometrului, se folosește un clichet de blocare 4 .
Mecanismele malteze și cu clichet sunt utilizate pe scară largă în mașini-unelte și instrumente,
Dacă este necesar să se transfere la relativ distanta lunga energie mecanică dintr-un punct în spațiu în altul, apoi se folosesc mecanisme cu legături flexibile.
Curele, frânghii, lanțuri, fire, panglici, bile etc. sunt folosite ca verigi flexibile care transmit mișcarea de la unul chiar al mecanismului la altul,
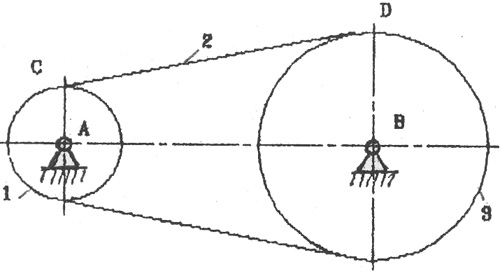
Pe fig. 2.14 prezintă o diagramă bloc a celui mai simplu mecanism cu o legătură flexibilă.
Angrenajele cu legături flexibile sunt utilizate pe scară largă în inginerie mecanică, fabricarea de instrumente și alte industrii.
Cele mai tipice mecanisme simple au fost luate în considerare mai sus. mecanismele sunt, de asemenea, date în Literatură specială, certificate-pa și cărți de referință, de exemplu, cum ar fi.
Formule structurale ale mecanismelor.
Există modele generale în structura (structura) diferitelor mecanisme care raportează numărul de grade de libertate W mecanism cu numărul de legături și numărul și tipul perechilor sale cinematice. Aceste modele sunt numite formule structurale ale mecanismelor.
Pentru mecanismele spațiale, formula lui Malyshev este în prezent cea mai comună, a cărei derivare este următoarea.
Lasă să intre un mecanism cu m legături (inclusiv rack), - numărul de perechi care se mișcă una, două, trei, patru și cinci. Să notăm numărul de legături în mișcare. Dacă toate legăturile în mișcare ar fi corpuri libere, numărul total grade de libertate ar fi 6 n . Cu toate acestea, fiecare pereche cu o singură mișcare V clasa impune mișcării relative a legăturilor care formează o pereche, 5 legături, fiecare pereche cu două mișcări IV clasa - 4 legături etc. Prin urmare, numărul total de grade de libertate, egal cu șase, va fi redus cu suma
unde este mobilitatea unei perechi cinematice, este numărul de perechi a căror mobilitate este egală cu i . Numărul total de conexiuni suprapuse poate include un anumit număr q conexiuni redundante (repetate) care dublează alte conexiuni fără a reduce mobilitatea mecanismului, ci doar transformându-l într-un sistem static nedeterminat. Prin urmare, numărul de grade de libertate ale mecanismului spațial, egal cu numărul de grade de libertate ale lanțului său cinematic în mișcare în raport cu rack, este determinat de următoarea formulă Malyshev:
sau în stenografie
(2.2)
pentru mecanism sistem static determinat, pentru - sistem static nedeterminat.
În cazul general, soluția ecuației (2.2) este o problemă dificilă, deoarece este necunoscută W și q ; soluțiile disponibile sunt complexe și nu sunt luate în considerare în această prelegere. Cu toate acestea, într-un caz anume, dacă W , egal cu numărul de coordonate generalizate ale mecanismului, găsite din considerente geometrice, din această formulă puteți găsi numărul de conexiuni redundante (vezi Reshetov L. N. Proiectarea mecanismelor raționale. M., 1972)
(2.3)
si rezolva problema determinabilitatii statice a mecanismului; sau, știind că mecanismul este determinat static, găsiți (sau verificați) W.
Este important de menționat că formulele structurale nu includ dimensiunile legăturilor, prin urmare, în analiza structurală a mecanismelor, se poate presupune că acestea sunt oricare (în anumite limite). Dacă nu există conexiuni redundante (), asamblarea mecanismului are loc fără deformarea legăturilor, acestea din urmă par să se autoajusteze; prin urmare, astfel de mecanisme se numesc auto-aliniere. Dacă există conexiuni redundante (), atunci asamblarea mecanismului și mișcarea legăturilor sale devin posibile numai atunci când acestea din urmă sunt deformate.
Pentru mecanisme plate fără legături redundante formula structurala poartă numele de P. L. Chebyshev, care a propus-o pentru prima dată în 1869 pentru mecanismele de pârghie cu perechi de rotație și un grad de libertate. În prezent, formula Chebyshev este extinsă la orice mecanism plat și este derivată ținând cont de constrângerile în exces, după cum urmează
Lăsați un mecanism plat cu m legături (inclusiv rack), - numărul de legături mobile, - numărul de perechi inferioare și - numărul de perechi superioare. Dacă toate verigile în mișcare ar fi corpuri libere care fac o mișcare plană, numărul total de grade de libertate ar fi egal cu 3 n . Cu toate acestea, fiecare pereche inferioară impune două legături mișcării relative a legăturilor care formează perechea, lăsând un grad de libertate, iar fiecare pereche superioară impune o legătură, lăsând 2 grade de libertate.
Numărul de legături suprapuse poate include un anumit număr de legături redundante (repetate), a căror eliminare nu crește mobilitatea mecanismului. În consecință, numărul de grade de libertate ale unui mecanism plat, adică numărul de grade de libertate ale lanțului său cinematic mobil în raport cu rack, este determinat de următoarea formulă Chebyshev:
(2.4)
Dacă se știe, de aici puteți afla numărul de conexiuni redundante
(2.5)
Indicele „p” se referă la faptul că vorbim despre un mecanism ideal plat, sau mai precis, despre schema lui plată, deoarece din cauza inexactităților de fabricație, un mecanism plat este într-o oarecare măsură spațial.
Conform formulelor (2.2)-(2.5), se efectuează o analiză structurală a mecanismelor existente și o sinteză a diagramelor structurale ale mecanismelor noi.
Analiza structurală și sinteza mecanismelor.
Influența conexiunilor redundante asupra performanței și fiabilității mașinilor.
După cum sa menționat mai sus, cu dimensiuni arbitrare (în anumite limite) ale legăturilor, un mecanism cu legături redundante () nu poate fi asamblat fără deformarea legăturilor. Prin urmare, astfel de mecanisme necesită o precizie sporită de fabricație, altfel, în timpul procesului de asamblare, legăturile mecanismului sunt deformate, ceea ce determină încărcarea perechilor cinematice și a legăturilor cu forțe suplimentare semnificative (în plus față de acele forțe externe principale pentru care mecanismul este destinat a fi transmis). Cu o precizie insuficientă în fabricarea unui mecanism cu legături excesive, frecarea în perechile cinematice poate crește foarte mult și poate duce la blocarea legăturilor, prin urmare, din acest punct de vedere, legăturile excesive în mecanisme sunt nedorite.
În ceea ce privește conexiunile redundante în lanțurile cinematice ale mecanismului, atunci când se proiectează mașini, acestea ar trebui eliminate sau lăsate la o cantitate minimă dacă eliminarea lor completă se dovedește a fi neprofitabilă din cauza complexității designului sau din alte motive. În cazul general, trebuie căutată soluția optimă, ținând cont de disponibilitatea echipamentului tehnologic necesar, costul de producție, durata de viață necesară și fiabilitatea mașinii. Prin urmare, aceasta este o sarcină foarte dificilă pentru fiecare caz specific.
Vom lua în considerare metodologia de determinare și eliminare a legăturilor redundante în lanțurile cinematice ale mecanismelor folosind exemple.
Să fie un mecanism plat cu patru legături cu patru perechi de rotație cu o singură mișcare (Fig. 2.15, A ) din cauza inexactităților de fabricație (de exemplu, din cauza neparalelismului axelor A și D ) s-a dovedit a fi spațială. Asamblarea lanțurilor cinematice 4, 3, 2 și separat 4, 1 nu provoaca dificultati, ci puncte B, B poate fi plasat pe ax X . Cu toate acestea, pentru a asambla o pereche de rotație LA , format din linkuri 1 și 2 , va fi posibil doar prin combinarea sistemelor de coordonate Bxyz și B x y z , care necesită o deplasare liniară (deformare) a punctului Legătura B 2 de-a lungul axei x şi deformaţii unghiulare ale verigii 2 în jurul axelor x și z (indicat prin săgeți). Aceasta înseamnă că există trei legături redundante în mecanism, ceea ce este confirmat și de formula (2.3): . Pentru ca acest mecanism spațial să fie determinabil static, este necesară cealaltă schemă structurală a acestuia, de exemplu, prezentată în Fig. 2.15, b , unde Asamblarea unui astfel de mecanism va avea loc fără etanșeitate, de la alinierea punctelor B și B va fi posibil prin mutarea punctului DIN într-o pereche cilindrică.
Este posibilă o variantă a mecanismului (Fig. 2.15,în ) cu două perechi sferice (); În acest caz, în afară demobilitatea de bazăapare mecanismulmobilitatea locală- capacitatea de a roti biela 2 în jurul axei sale Soare ; această mobilitate nu afectează legea de bază a mișcării mecanismului și poate fi chiar utilă în ceea ce privește nivelarea uzurii balamalelor: biela 2 în timpul funcționării mecanismului, acesta se poate roti în jurul axei sale din cauza sarcinilor dinamice. Formula Malyshev confirmă că un astfel de mecanism va fi determinat static:

Orez. 2.15
Cel mai simplu și metoda eficienta eliminarea conexiunilor redundante în mecanismele dispozitivelor - folosirea unei perechi superioare cu contact punctual în locul unei legături cu două perechi inferioare; gradul de mobilitate al mecanismului plat în acest caz nu se modifică, deoarece, conform formulei Chebyshev (la):
Pe fig. 2.16, a, b, c este dat un exemplu de eliminare a legăturilor redundante într-un mecanism cu came cu un împingător cu role care se mișcă progresiv. Mecanism (Fig. 2.16, A ) - patru verigi (); cu excepția mobilității principale (rotația camei 1
) există mobilitate locală (rotirea independentă a unei role cilindrice rotunde 3
în jurul axei sale) Prin urmare, . Schema plată nu are conexiuni redundante (mecanismul este asamblat fără interferențe). Dacă, din cauza inexactităților în fabricație, mecanismul este considerat spațial, atunci cu contact liniar al rolei 3 cu came 1 conform formulei lui Malyshev la , obținem, dar într-o anumită condiție. Pereche cinematică cilindru - cilindru (Fig. 2.16, 6
) când rotația relativă a legăturilor este imposibilă 1, 3 în jurul axei z ar fi o pereche tripartită. Dacă o astfel de rotație, din cauza inexactităților în fabricație, are loc, dar este mică, iar contactul liniar este practic păstrat (în timpul încărcării, patch-ul de contact este aproape de formă dreptunghiulară), atunci aceasta 
perechea cinematică va fi deci patru-mobilă și
Fig.2.17
Reducerea clasei celei mai înalte perechi prin utilizarea unei role în formă de butoi (pereche cu cinci mișcări cu contact punctual, Fig. 2.16,în ), obținem pentru și - mecanismul este determinat static. Cu toate acestea, trebuie amintit că contactul liniar al legăturilor, deși necesită o precizie sporită de fabricație, vă permite să transferați sarcini mai mari decât contactul punctual.
În Fig. 2.16, d, e un alt exemplu este dat de eliminarea conexiunilor redundante într-un angrenaj cu patru brațe (, contactul dinților roților 1, 2 și 2, 3 - liniară). În acest caz, conform formulei Chebyshev, - schema plată nu are conexiuni redundante; conform formulei Malyshev, mecanismul este static nedeterminat, prin urmare, va fi necesară o precizie ridicată de fabricație, în special, pentru a asigura paralelismul axelor geometrice ale tuturor celor trei roți.
Înlocuirea dinților de rulare 2 în formă de butoi (Fig. 2.16, d ), obținem un mecanism determinat static.





