Tipuri de perechi cinematice. Vedeți ce este „perea cinematică” în alte dicționare
O pereche cinematică este o conexiune mobilă a două legături învecinate care le asigură o anumită mișcare relativă. Elementele unei perechi cinematice sunt un set de suprafețe de linii sau puncte de-a lungul cărora are loc o conexiune mobilă a două legături și care formează o pereche cinematică. Pentru ca o pereche să existe, elementele legăturilor sale constitutive trebuie să fie în contact constant T.
Un exemplu de astfel de articulație este articulația șoldului. Există și articulații de două grade de libertate sau un grad de libertate. Datorită mobilității lor, lanțurile se împart în: rigide, normale și libere. Lanțul dur este un caz special Numele în sine este un fel de oximoron. Trebuie să avem de-a face cu un lanț cinematic care nu se mișcă! Este folosit în construcții și nu este un subiect de interes în mecanică. Lanțul cinematic cel mai des folosit este lanțul drept.
Într-un astfel de lanț, mișcarea unui element afectează mișcarea tuturor celorlalte elemente ale sistemului. Apoi se aplică lanțul liber. Un exemplu de lanț liber este o cutie de viteze, o cutie de viteze formată din angrenaje în care una sau mai multe roți nu au o axă fixă de rotație.
Distribuiți munca pe rețelele sociale
Dacă această lucrare nu vă convine, există o listă de lucrări similare în partea de jos a paginii. De asemenea, puteți utiliza butonul de căutare
Cursul 2
Oricare ar fi mecanismul mașinii, acesta constă întotdeauna numai din legături și perechi cinematice.
Condițiile de conectare impuse în mecanismele pe verigile mobile, în teoria mașinilor și a mecanismelor Se obișnuiește să se numească perechi cinematice.
În prezent, lanțurile cinematice sunt folosite pentru a descrie multe sisteme complexe circulaţie. Acest lucru se aplică în special roboticii. De exemplu, mișcarea unui manipulator, adică o parte a unui robot care poate îndeplini unele funcții ale unei mâini umane, este descrisă ca un lanț cinematic format din elemente și verigi mobile între ele, la care se face referire în robot sub forma de conectori sau balamale. Dar conceptul de lanț cinematic este folosit și în descrierea mișcării corpului uman. Un lanț cinematic este definit aici ca o combinație de mai multe articulații succesive care alcătuiesc un sistem de mișcare.
Cuplu cinematicnumită conexiune mobilă a două legături învecinate, asigurându-le o anumită mișcare relativă.
În tabel. 2.1 prezintă denumirile, desenele, simbolurile celor mai comune perechi cinematice în practică, precum și clasificarea acestora.
Legăturile, atunci când sunt combinate într-o pereche cinematică, pot intra în contact unele cu altele de-a lungul suprafețelor, liniilor și punctelor.
De obicei, acesta este un lanț obișnuit, simplu. Iazurile, după cum se vede aici, sunt perechi cinematice, iar oasele sunt elementele fixe ale lanțului. Biomecanica umană introduce și împărțirea lanțurilor cinematice în deschise și închise. Într-un circuit închis, linia sa de capăt nu este liberă. Există două cinematice închise în corpul uman - piept și pelvis. Pe de altă parte, un lanț cinematic deschis este unul în care ultima verigă este liberă și se conectează la o singură verigă învecinată.
Majoritatea mișcărilor efectuate de membre permit deschiderea țintelor deoarece au un braț sau un picior de foc la capete. Pe de altă parte, multe dintre lucrările efectuate corpul uman necesită și împământare. De exemplu, atunci când trageți piciorul unei frânghii, mușchii șoldului și solul de sub picioare pot fi considerate un tip de circuit închis care permite liniei să se deplaseze de-a lungul solului.
Elementele unei perechi cinematiceei numesc un set de Suprafețe, linii sau puncte de-a lungul cărora are loc o legătură mobilă a două legături și care formează o Pereche cinematică. În funcție de tipul de contact al elementelor perechilor cinematice, există mai sus și mai jos perechi cinematice.
Cupluri cinematice, formate din elemente sub forma unei linii sau a unui punct, se numesc mai sus .
Perechea biocinetică formează elemente rigide și articulații. Gradul de libertate se numește mișcare independentă în articulație, iar numărul de grade de libertate se numește numărul total de mișcări relative independente ale corpului rigid. Corpul atașat are 6 grade de libertate: poate efectua 3 mișcări de rotație în jurul a 3 axe și 3 mișcări progresive de-a lungul acestora. Nu poate avea mai mult de 5 grade de libertate. Când mișcarea relativă a elementelor este mai mică de 5 grade sau 1-3 mm, atunci combinația este considerată un joc și nu o pereche cinematică.
Se numesc perechi cinematice formate din elemente sub formă de suprafețe inferior.
Pentru ca o pereche să existe, elementele legăturilor sale constitutive trebuie să fie în contact constant, adică. fi închis. Închiderea perechilor cinematice poate figeometric sau cu forță, De exemplu, cu ajutorul propriei mase, arcuri etc.
Clasa perechii cinematice definește un număr care este diferența dintre număr maxim grade de libertate ale unui membru și numărul de grade de libertate ale unui compus dat. La om, numai mișcările de rotație sunt posibile în sistemul os-articular. Acesta este rezultatul unei acțiuni musculare unidirecționale care poate trage și nu poate împinge. Articulațiile sferice și acetabulare au trei grade de libertate. Lanțul biochistic este un set coerent de elemente conectate prin perechi de perechi biocinetice. Circuitul poate fi deschis sau închis.
Vorbim despre un lanț deschis când ultima verigă este liberă, poate fi, de exemplu, un deget. Manipulatorii și roboții industriali au cel mai adesea un lanț cinematic deschis. Aceste lanțuri constau din mai multe verigi active care permit mișcarea și orientarea spațială a vârfului de lucru, adică a efectorului.
Rezistența, rezistența la uzură și durabilitatea perechilor cinematice depind de tipul și designul acestora. Perechile inferioare sunt mai rezistente la uzură decât cele superioare. Acest lucru se explică prin faptul că, în perechile inferioare, contactul elementelor perechilor are loc de-a lungul suprafeței și, prin urmare, cu aceeași sarcină, în ea apar presiuni specifice mai mici decât în cea superioară. Uzura, ceteris paribus, este proporțională cu presiunea specifică și, prin urmare, Perechile inferioare se uzează Mai lent decât cele superioare. Prin urmare, pentru a reduce uzura mașinilor, este de preferat să se utilizeze perechi inferioare, totuși, adesea, utilizarea perechilor cinematice superioare face posibilă simplificarea semnificativă a diagramelor structurale ale mașinilor, ceea ce reduce dimensiunile acestora și simplifică proiectarea. Prin urmare, alegerea corectă a perechilor cinematice este o problemă complexă de inginerie.
Numărul de grade de libertate este numărul de poziții variabile care trebuie specificate pentru a determina în mod unic aranjarea spațială. Pentru a determina numărul de grade de libertate, utilizați formula. Pe baza formulei de mai sus, se determină numărul de grade de libertate pentru mai mulți manipulatori simpli.
Folosind ecuația, numărul de grade de libertate este egal. Pentru ca manipulatorul să aibă patru grade de libertate, utilizați patru unități, așa cum se arată în fig. Utilizați 5 actuatoare, așa cum se arată în Figura 7, pentru ca manipulatorul să îndeplinească anumite sarcini.
Perechile cinematice sunt, de asemenea, împărțite lanumărul de grade de libertate(mobilitate), pe care îl pune la dispoziția legăturilor conectate prin intermediul acestuia, saunumărul de condiții de legătură(clasa de perechi), impuse de pereche asupra mișcării relative a legăturilor legate. Atunci când folosesc o astfel de clasificare, dezvoltatorii de mașini primesc informații despre posibilele mișcări relative ale legăturilor și despre natura interacțiunii factorilor de forță dintre elementele unei perechi.
Deoarece este ușor de observat numărul de grade de libertate ale unui lanț cinematic deschis, acesta este egal cu numărul de perechi cinematice de clase a cincea rotative și glisante. In cazul perechilor cinematice altele decat tatii, sablonul trebuie aplicat corespunzator, sau trebuie inlocuite toate perechile cinematice cu tocuri rotative sau glisante.
Există mai multe modalități de a rezolva această problemă: puteți înlocui articulația sferică cu trei articulații rotative cu deplasare zero sau puteți înlocui o pereche cinematică adecvată pentru desen. După cum puteți vedea din calculele DOF, ar trebui aplicate 6 actuatoare, care ar trebui aplicate componentelor individuale, așa cum se arată în fig.
Un link gratuit care este în cazul general în M - spaţiu dimensional, permiţând P tipuri de mișcări cele mai simple, are un număr de grade de libertate! ( H) sau W - mobil.
Deci, dacă legătura este într-un spațiu tridimensional, permițând șase tipuri de mișcări simple - trei de rotație și trei de translație în jurul și de-a lungul axelor X, V, Z , atunci spunem că are șase grade de libertate, sau are șase coordonate generalizate, sau este șase mobilă. Dacă legătura se află într-un spațiu bidimensional care permite trei tipuri de mișcări simple - o rotație în jur Z și două translaționale de-a lungul axelor X și Y , apoi se spune că are trei grade de libertate, sau trei coordonate generalizate, sau este tri-mobilă etc.
Mai jos sunt diagrame ale manipulatorilor cu un număr dat de grade de libertate pentru introspecție. Componente cinematice care alcătuiesc o pereche cinematică cu o unitate atașată, care permit mișcarea perechilor cinematice relative pentru a forma un bloc de mișcare.
Blocul cinematic al manipulatorului creează mecanism cinematic cu unități atașate. Mecanismul mașinii de manipulare determină doi parametri cinematici. Mobilitatea - numărul de grade de libertate ale lanțului cinematic al mecanismului imobilizat - baza; manevrabilitate - numărul de grade de libertate ale lanțului cinematic al unui mecanism fix: elementul este baza și elementul este ultimul din lanțul cinematic. Primul dintre acești parametri indică numărul de legături care trebuie plasate pe mecanism pentru a-l imobiliza complet.
Tabelul 2.1
Atunci când legăturile sunt combinate folosind perechi cinematice, ele își pierd gradele de libertate. Aceasta înseamnă că perechile cinematice impun legăturilor pe care le conectează printr-un număr S.
În funcție de numărul de grade de libertate pe care legăturile combinate într-o pereche cinematică le au în mișcare relativă, se determină mobilitatea perechii ( L = H ). Dacă H este numărul de grade de libertate ale legăturilor perechii cinematice în mișcare relativă, la mobilitatea perechilor este determinată după cum urmează:
În mod similar, dar după imobilizarea suplimentară a ultimului element liber, determină libertatea de mișcare a mecanismului, atunci când, de exemplu, mânerul sau unealta unității cinematice ocupă o poziție precis definită. În plus față de parametrii sintetici, cum ar fi numerele de mobilitate și manevrabilitate, mecanismul unității cinematice a unui manipulator este descris prin proprietățile sale geometrice generale, adică așa-numita structură cinematică prezentată pentru manipulatorul exemplar din Fig.
Conform conceptului de structură cinematică, un lanț sau mecanism este definit ca definiția unei diagrame cinematice sub forma unei schițe, folosind nume de membri și perechi cinematice. Foarte des, atunci când structura manipulatorului este complexă, este posibilă reprezentarea structurii cinematice în spațiu tridimensional, așa cum se arată în fig. 11 pentru manipulatorul ilustrat prezentat în FIG.
unde P - mobilitatea spatiului in care exista perechea luata in considerare; S - numarul de obligatiuni impuse de pereche.
Trebuie remarcat faptul că mobilitatea unei perechi W , definit de (2.1), nu depinde de tipul de spațiu în care este implementat, ci doar de construcție.
De exemplu, o pereche de rotație (translațională) (a se vedea tabelul 2.1), atât în spațiu mobil de șase, cât și de trei, va rămâne în continuare unică mobilă, în primul caz îi vor fi impuse 5 legături, iar în al doilea caz - 2 legături, și, deci vom avea, respectiv:
Structura unității cinematice, împreună cu descrierea dimensiunilor diagramei cinematice și a gamei de mișcare a motoarelor, definește clar mișcarea mecanismului și prinderea sau mișcarea rezultată a sculei. Din motive operaționale, acest spațiu este descris independent de schița dimensională și prin volum. Următoarele zone sunt evidențiate în spațiul de lucru.
De exemplu, pentru structura manipulatorului prezentată în FIG. 10, spațiul principal de lucru este prezentat în fig. Spațiile de lucru și de coliziune sunt împărțite în: mecanice și de direcție. Spațiile mecanice sunt derivate din proprietățile structurale ale unității cinematice cu corelații care decurg, de exemplu, din însumarea în legături, deformații statice și dinamice etc. aceste spații sunt de obicei mai mari decât spațiile nominale determinate pe baza geometriei angrenajului. Spațiile de control includ limitele de control legate de proprietățile sistemelor de măsurare a deplasării, constrângerile de procesare și sistemul de control în sine, cum ar fi limitele intervalului de control al servo.
pentru șase spațiu mobil:
pentru un spațiu mobil cu trei:
După cum puteți vedea, mobilitatea perechilor cinematice nu depinde de caracteristicile spațiului, ceea ce este un avantaj al acestei clasificări. Dimpotrivă, împărțirea frecventă a perechilor cinematice în clase are de suferit din cauza faptului că clasa unei perechi depinde de Caracteristicile spațiului, ceea ce înseamnă că aceeași pereche în spații diferite are o clasă diferită. Acest lucru este incomod pentru scopuri practice, ceea ce înseamnă că o astfel de clasificare a perechilor cinematice este irațională, deci este mai bine să nu o folosiți.
Aceste spații sunt de obicei mai mici decât cele nominale. Raportul dintre volumul spațiului de lucru și tranziția sau coliziunea determină corectitudinea deciziei luate a unității cinematice a mașinii de manipulare, soluția este mai bună, cea mai mare parte a spațiului de coliziune este ocupată de spațiul de lucru. Ca parametri, coeficienții sunt dați prin expresii.
Unele dintre diagramele de manipulare timpurii au primit o gamă de mișcare pentru elemente individuale, iar modelele lor principale de detalii sunt prezentate mai jos. Transportul este o ramură a economiei care acoperă transportul de mărfuri și pasageri în diferite moduri. Infrastructură Facilități de transport.
Este posibil să alegeți o astfel de formă a elementelor unei perechi, astfel încât, cu o mișcare elementară independentă, să apară o a doua - un dependent (derivat). Un exemplu de astfel de pereche cinematică este un șurub (Tabelul 2. 1) . În această pereche, mișcarea de rotație a șurubului (piuliță) determină mișcarea sa de translație de-a lungul axei. O astfel de pereche ar trebui să fie atribuită uneia cu o singură mișcare, deoarece în ea se realizează doar o singură mișcare independentă, cea mai simplă.
La tara. Uz general. Utilizare în jos. Tehnica – instrumente materiale ale activității umane. Coboară oamenii la muncă, îi face mai mici. Cea mai generoasă este tehnica de producție. Transport. Educație și cultură sportivă.
Un mecanism este un sistem corporal în care mișcarea unuia sau mai multor corpuri se transformă în mișcarea proprie a altor corpuri. Mașină - un dispozitiv mecanic de mișcare pentru conversia energiei, materialelor sau informațiilor. Scopul este de a facilita munca fizică sau psihică a unei persoane.
Conexiuni cinematice.
Perechile cinematice date în tabel. 2.1, simplu și compact. Ele implementează aproape toate cele mai simple mișcări relative ale legăturilor necesare pentru crearea mecanismelor. Cu toate acestea, atunci când se creează mașini și mecanisme, acestea sunt rareori utilizate. Acest lucru se datorează faptului că forțe mari de frecare apar de obicei în punctele de contact ale legăturilor care formează o pereche. Acest lucru duce la uzura semnificativă a elementelor perechii și, prin urmare, la distrugerea acesteia. Prin urmare, cel mai simplu lanț cinematic cu două legături al unei perechi cinematice este adesea înlocuit cu lanțuri cinematice mai lungi, care împreună implementează aceeași mișcare relativă a legăturilor ca și perechea cinematică înlocuită.
După natura consumului, mașinile sunt împărțite în. O mașină energetică este o mașină care este folosită pentru a schimba energia de orice fel în energie mecanică și invers. Dacă orice energie este convertită în mecanică, atunci astfel de mașini sunt motoare. Dacă de la mecanic la oricare - generatoare.
O mașină de lucru este o mașină care utilizează energie mecanică de la un motor sau altă sursă de energie pentru a converti materiale. Mașinile de lucru se împart în: Transport tehnologic. Mașini de informare - informații despre proces. Mașini cibernetice - modificarea sau simularea intrărilor de mecanisme, procese fiziologice și biologice, caracteristice omului și naturii. Se caracterizează prin elemente de inteligență artificială.
Un lanț cinematic conceput pentru a înlocui o pereche cinematică se numește conexiune cinematică.
Să dăm exemple de lanțuri cinematice, pentru cele mai comune în practică perechi cinematice rotaționale, translaționale, elicoidale, sferice și plan-plan.
Din Tabel. 2.1 se poate observa că cel mai simplu analog al unei perechi cinematice rotative este un rulment cu elemente de rulare. De asemenea, ghidajele cu role înlocuiesc perechea liniară și așa mai departe.
Instrumente - aparate pentru utilizare pentru măsurare mărimi fizice, procese de control, automatizare de control și reglare. Mecanismele sunt o combinație de părți mobile care schimbă o mișcare pentru mișcarea necesară a altora. solide. Când fluidul este înlocuit cu o schimbare a mișcării, acestea sunt mecanisme hidraulice în care gazul este pneumatic.
Motorul principal al motorului combustie interna este un mecanism de volant cu glisare care transformă o tija de piston culisantă într-un arbore cotit rotativ. Cel mai important mecanism al compresorului transformă mișcarea de rotație a arborelui cotit într-o mișcare de alunecare a pistonului.
Conexiunile cinematice sunt mai convenabile și mai fiabile în funcționare, rezistă la forțe (momente) mult mai mari și permit mecanismelor să funcționeze la viteze relative mari ale legăturilor.
Principalele tipuri de mecanisme.
Mecanismul poate fi văzut ca caz special un lanț cinematic în care cel puțin o verigă este transformată într-un rack, iar mișcarea verigilor rămase este determinată de mișcarea specificată a verigilor de intrare.
Trăsăturile distinctive ale lanțului cinematic, reprezentând mecanismul, sunt mobilitatea și siguranța mișcării legăturilor sale față de cremalieră.
Un mecanism poate avea mai multe legături de intrare și o legătură de ieșire, caz în care se numește mecanism de însumare și, invers, o legătură de intrare și mai multe legături de ieșire, atunci se numește mecanism de diferențiere.
Mecanismele sunt împărțite înghidaje și transmisie.
mecanism de transmisienumit un dispozitiv conceput pentru a reproduce o anumită relație funcțională între mișcările legăturilor de intrare și de ieșire.
mecanism de ghidareei numesc un mecanism în care traiectoria unui anumit punct al unei legături care formează perechi cinematice numai cu legăturile în mișcare coincide cu o curbă dată.
Luați în considerare principalele tipuri de mecanisme care au găsit o aplicare largă în tehnologie.
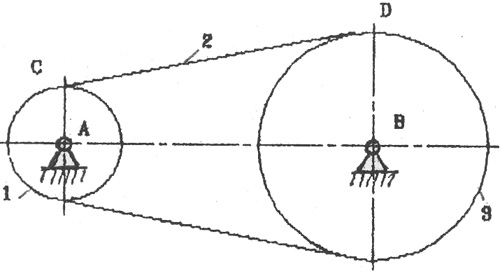
Se numesc mecanisme ale căror legături formează doar perechile cinematice inferioarepârghie-articulată. Aceste mecanisme sunt utilizate pe scară largă datorită faptului că sunt durabile, fiabile și ușor de operat. Principalul reprezentant al unor astfel de mecanisme este articulația cu patru verigi (Fig. 2.1).
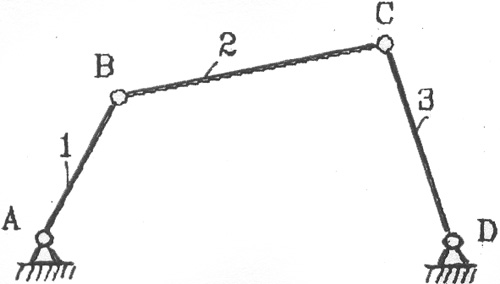
Numele mecanismelor sunt de obicei determinate de numele legăturilor lor de intrare și ieșire sau de legătura caracteristică inclusă în componența lor.
În funcție de legile mișcării legăturilor de intrare și de ieșire, acest mecanism poate fi numit crank-rocker, double crank, dublu rocker, rocker-crank.
Bratul articulat cu patru brațe este utilizat în construcția de mașini-unelte, fabricarea de instrumente, precum și în utilaje agricole, alimentare, plug de zăpadă și alte mașini.

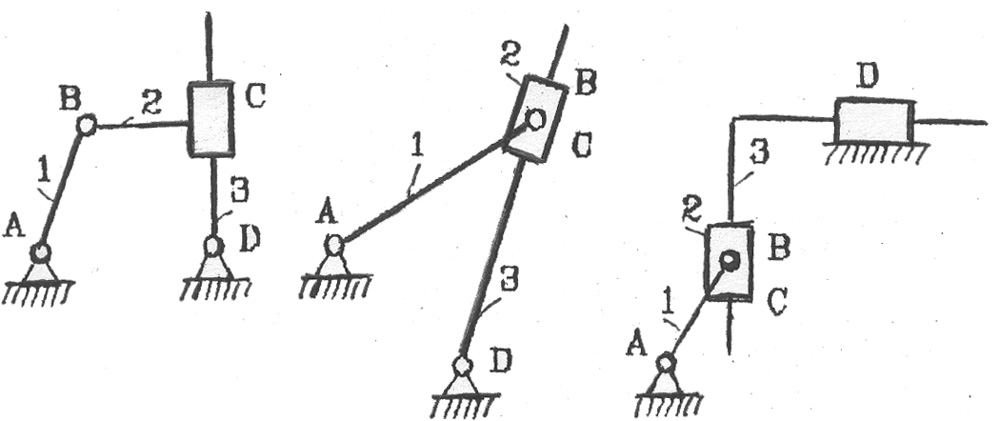
Dacă înlocuim o pereche de rotație într-o articulație cu patru articulații, de exemplu D , la translație, apoi obținem binecunoscutul mecanism manivelă-glider (Fig. 2.2).
Orez. 2.2. Diferite tipuri de mecanisme cu manivelă:
1 - manivela 2 - biela; 3 - glisor
Mecanismul crank-slider (slider-crank) și-a găsit o aplicație largă în compresoare, pompe, motoare cu ardere internă și alte mașini.
Înlocuirea unei perechi de rotație într-o articulație cu patru articulații DIN la translație, obținem un mecanism basculant (Fig. 2.3).
Pe p și c .2.3, în mecanismul basculant se obține dintr-o articulație cu patru articulații prin înlocuirea perechilor de rotație în acesta Pot face pentru progresiv.
Mecanismele balansoare și-au găsit o largă aplicație în rindele datorită proprietății lor inerente de asimetrie a lucrului și miscare inactiv. De obicei au o cursă de lucru lungă și o cursă rapidă în gol care asigură revenirea frezei în poziția inițială.
Orez. 2.3. Diferite tipuri de mecanisme balansoare:
1 - manivelă; 2 - piatră; 3 - culise.
Mecanismele balamale-pârghie au găsit o mare utilizare în robotică (Fig. 2.4).
Particularitatea acestor mecanisme este că au un numar mare grade de libertate, ceea ce înseamnă că au multe unități. Funcționarea coordonată a antrenărilor legăturilor de intrare asigură deplasarea gripei de-a lungul unei traiectorii raționale și către un loc dat din spațiul înconjurător.
Aplicație pe scară largă în ingineriemecanisme cu came. Cu ajutorul mecanismelor cu came, este din punct de vedere structural cel mai simplu mod de a obține aproape orice mișcare a verigii antrenate conform unei anumite legi,
Există în prezent număr mare varietati de mecanisme cu came, dintre care unele sunt prezentate în Fig. 2.5.

Legea necesară de mișcare a legăturii de ieșire a mecanismului cu came este atinsă dând legătura de intrare (camă) o formă adecvată. Cama poate efectua rotație (Fig. 2.5, a, b ), translațional (Fig. 2.5, c, g ) sau mișcare complexă. Legătura de ieșire, dacă face o mișcare de translație (Fig. 2.5, a, în ), numit împingător, iar dacă se balansează (Fig. 2.5, G ) - rocker. Pentru a reduce pierderile prin frecare în perechea cinematică superioară LA utilizați o rolă de legătură suplimentară (Fig. 2.5, G).
Mecanismele cu came sunt utilizate atât în mașinile de lucru, cât și în diferite tipuri de dispozitive de comandă.
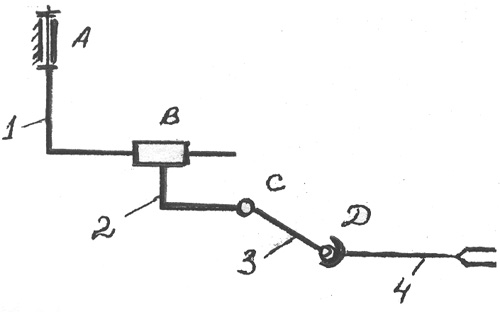
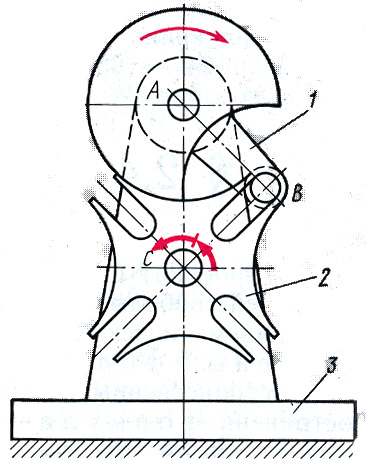
Foarte des, în mașinile de tăiat metale, prese, diverse instrumente și dispozitive de măsurare se folosesc mecanisme cu șurub, dintre care cel mai simplu este prezentat în fig. 2.6:
Orez. 2.6 Mecanism cu șuruburi:
1 - șurub; 2 - nuca; A, B, C - perechi cinematice
Mecanismele cu șurub sunt de obicei folosite acolo unde este necesar să se transforme mișcarea de rotație în mișcare de translație interdependentă sau invers. Interdependența mișcărilor se stabilește prin selectarea corectă a parametrilor geometrici ai perechii de șuruburi LA .
Pană mecanismele (Fig. 2.7) sunt utilizate în alt fel dispozitive de prindere și dispozitive de fixare în care este necesar să se creeze o forță mare de ieșire cu forțe de intrare limitate. O caracteristică distinctivă a acestor mecanisme este simplitatea și fiabilitatea designului.
Mecanismele în care transferul mișcării între corpurile în contact se realizează datorită forțelor de frecare se numesc frecare. Cele mai simple mecanisme de frecare cu trei brațe sunt prezentate în fig. 2.8

Orez. 2.7 Mecanism cu pană:
1, 2 - legături; L, V, C - sărbători cinematice.

Orez. 2.8 Mecanisme de frecare:
A - mecanism de frecare cu axe paralele; b - mecanism de frecare cu axe care se intersectează;în - mecanism de frecare cu cremalieră și pinion; 1 - rola de intrare (roata);
2 – rola de iesire (roata); 2" - șină
Datorită faptului că legăturile 1 și 2 atașate unul de celălalt, de-a lungul liniei de contact dintre ele, ia naștere o forță de frecare, care trage legătura condusă împreună cu ea 2 .
Angrenajele cu frecare sunt utilizate pe scară largă în dispozitive, unități de bandă, variatoare (mecanisme cu control lin al vitezei).
Pentru transmisie mișcare de rotație conform unei legi date, între arbori cu axe paralele, de intersectare și de intersectare sunt utilizate diferite tipuri de roți dințate mecanisme . Cu ajutorul angrenajelor, este posibil să transferați mișcarea atât între arbori cuaxe fixe, deci cu deplasându-se în spațiu.
Mecanismele angrenate sunt folosite pentru a schimba frecvența și direcția de rotație a legăturii de ieșire, însumarea sau separarea mișcărilor.

Pe fig. 2.9 prezintă principalii reprezentanți ai angrenajelor cu axe fixe.
Fig 2.9. Transmisii cu angrenaje cu axe fixe:
a - cilindric; b - conic; în - sfârșit; g - rack;
1 - angrenaj; 2 - angrenaj; 2 * șină
Cea mai mică dintre cele două angrenaje angrenate se numește unelte și multe altele - roată dințată.
Cremaliera este un caz special al unei roți dințate în care raza de curbură este egală cu infinitul.

Dacă trenul de viteze are angrenaje cu axe mobile, atunci acestea se numesc planetare (Fig. 2.10):
Cu toate acestea, angrenajele planetare, în comparație cu angrenajele cu axă fixă, permit transferul de putere și rapoarte de transmisie mai mari cu un număr mai mic de viteze. Ele sunt, de asemenea, utilizate pe scară largă în crearea mecanismelor de însumare și diferențială.
Transmiterea mișcărilor între axele care se intersectează se realizează cu ajutorul unui angrenaj melcat (Fig. 2.11).

Un angrenaj melcat se obține dintr-o transmisie șurub-piuliță prin tăierea longitudinală a piuliței și plierea ei de două ori în planuri reciproc perpendiculare. Angrenajul melcat are proprietatea de autofrânare și vă permite să implementați rapoarte mari de transmisie într-o singură etapă.
Orez. 2.11. Unelte melcate:
1 - vierme, 2 - roată melcă.
Mecanismele cu angrenaje cu mișcare intermitentă includ și mecanismul în cruce malteză. Pe fig. З-Л „2. arată mecanismul „crucii malteze” cu patru lame.
Mecanismul „crucii malteze” transformă rotația continuă a parului principal - manivelă 1 cu un felinar 3 în rotația intermitentă a „crucii” 2, felinar 3 intră în şanţul radial al „crucii” fără impact 2 și o întoarce spre colțul unde z este numărul de caneluri.
Pentru a efectua mișcarea într-o singură direcție, se folosesc mecanisme cu clichet. Figura 2.13 prezintă un mecanism cu clichet, constând dintr-un culbutor 1, o roată cu clichet 3 și clichete 3 și 4.

Când balansați balansoarul 1 câine legănător 3 conferă rotație roții cu clichet 2 numai la deplasarea culbutorului în sens invers acelor de ceasornic. Pentru a ține roata 2 de la rotația spontană în sensul acelor de ceasornic atunci când balansoarul se mișcă împotriva cronometrului, se folosește un clichet de blocare 4 .
Mecanismele malteze și cu clichet sunt utilizate pe scară largă în mașini-unelte și instrumente,
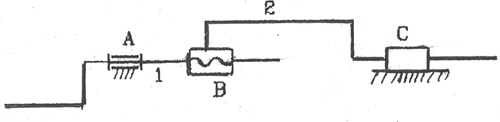
Dacă este necesar să se transfere la relativ distanta lunga energie mecanică dintr-un punct în spațiu în altul, apoi se folosesc mecanisme cu legături flexibile.
Curele, frânghii, lanțuri, fire, panglici, bile etc. sunt folosite ca verigi flexibile care transmit mișcarea de la unul chiar al mecanismului la altul,
Pe fig. 2.14 prezintă o diagramă bloc a celui mai simplu mecanism cu o legătură flexibilă.
Angrenajele cu legături flexibile sunt utilizate pe scară largă în inginerie mecanică, fabricarea de instrumente și alte industrii.
Cele mai tipice mecanisme simple au fost luate în considerare mai sus. mecanismele sunt, de asemenea, date în Literatură specială, certificate-pa și cărți de referință, de exemplu, cum ar fi.
Formule structurale ale mecanismelor.
Există modele generale în structura (structura) diferitelor mecanisme care raportează numărul de grade de libertate W mecanism cu numărul de legături și numărul și tipul perechilor sale cinematice. Aceste modele sunt numite formule structurale ale mecanismelor.
Pentru mecanismele spațiale, formula lui Malyshev este în prezent cea mai comună, a cărei derivare este următoarea.
Lasă să intre un mecanism cu m legături (inclusiv rack), - numărul de perechi care se mișcă una, două, trei, patru și cinci. Să notăm numărul de legături în mișcare. Dacă toate legăturile în mișcare ar fi corpuri libere, numărul total grade de libertate ar fi 6 n . Cu toate acestea, fiecare pereche cu o singură mișcare V clasa impune mișcării relative a legăturilor care formează o pereche, 5 legături, fiecare pereche cu două mișcări IV clasa - 4 legături etc. Prin urmare, numărul total de grade de libertate, egal cu șase, va fi redus cu suma
unde este mobilitatea unei perechi cinematice, este numărul de perechi a căror mobilitate este egală cu i . Numărul total de conexiuni suprapuse poate include un anumit număr q conexiuni redundante (repetate) care dublează alte conexiuni fără a reduce mobilitatea mecanismului, ci doar transformându-l într-un sistem static nedeterminat. Prin urmare, numărul de grade de libertate ale mecanismului spațial, care este egal cu numărul de grade de libertate ale lanțului său cinematic în mișcare în raport cu rack, este determinat de următoarea formulă Malyshev:
sau în stenografie
(2.2)
la , mecanismul este un sistem static determinat; la , un sistem static nedeterminat.
În cazul general, soluția ecuației (2.2) este o problemă dificilă, deoarece este necunoscută W și q ; soluțiile disponibile sunt complexe și nu sunt luate în considerare în această prelegere. Cu toate acestea, într-un caz anume, dacă W , egal cu numărul de coordonate generalizate ale mecanismului, găsite din considerente geometrice, din această formulă puteți găsi numărul de conexiuni redundante (vezi Reshetov L. N. Proiectarea mecanismelor raționale. M.., 1972)
(2.3)
si rezolva problema determinabilitatii statice a mecanismului; sau, știind că mecanismul este determinat static, găsiți (sau verificați) W.
Este important de menționat că formulele structurale nu includ dimensiunile legăturilor, prin urmare, în analiza structurală a mecanismelor, se poate presupune că acestea sunt oricare (în anumite limite). Dacă nu există conexiuni redundante (), asamblarea mecanismului are loc fără deformarea legăturilor, acestea din urmă par să se autoajusteze; prin urmare, astfel de mecanisme se numesc auto-aliniere. Dacă există conexiuni redundante (), atunci asamblarea mecanismului și mișcarea legăturilor sale devin posibile numai atunci când acestea din urmă sunt deformate.
Pentru mecanisme plate fără legături redundante formula structurala poartă numele de P. L. Chebyshev, care a propus-o pentru prima dată în 1869 pentru mecanismele de pârghie cu perechi de rotație și un grad de libertate. În prezent, formula Chebyshev este extinsă la orice mecanism plat și este derivată ținând cont de constrângerile în exces, după cum urmează
Lăsați un mecanism plat cu m legături (inclusiv rack), - numărul de legături mobile, - numărul de perechi inferioare și - numărul de perechi superioare. Dacă toate verigile în mișcare ar fi corpuri libere care fac o mișcare plană, numărul total de grade de libertate ar fi egal cu 3 n . Cu toate acestea, fiecare pereche inferioară impune două legături mișcării relative a legăturilor care formează perechea, lăsând un grad de libertate, iar fiecare pereche superioară impune o legătură, lăsând 2 grade de libertate.
Numărul de legături suprapuse poate include un anumit număr de legături redundante (repetate), a căror eliminare nu crește mobilitatea mecanismului. În consecință, numărul de grade de libertate ale unui mecanism plat, adică numărul de grade de libertate al lanțului său cinematic mobil în raport cu rack, este determinat de următoarea formulă Chebyshev:
(2.4)
Dacă se știe, de aici puteți afla numărul de conexiuni redundante
(2.5)
Indicele „p” se referă la faptul că vorbim despre un mecanism ideal plat, sau mai precis, despre schema lui plată, deoarece din cauza inexactităților în fabricație, un mecanism plat este într-o oarecare măsură spațial.
Conform formulelor (2.2)-(2.5), se efectuează o analiză structurală a mecanismelor existente și o sinteză a diagramelor structurale ale mecanismelor noi.
Analiză structurală si sinteza mecanismelor.
Influența conexiunilor redundante asupra performanței și fiabilității mașinilor.
După cum sa menționat mai sus, cu dimensiuni arbitrare (în anumite limite) legături, un mecanism cu legături redundante () nu poate fi asamblat fără deformarea legăturii. Prin urmare, astfel de mecanisme necesită o precizie sporită de fabricație, în caz contrar, în timpul procesului de asamblare, legăturile mecanismului sunt deformate, ceea ce determină încărcarea perechilor cinematice și a legăturilor cu forțe suplimentare semnificative (pe lângă cele de bază). forțe externe, pentru transmisia căruia este destinat mecanismul). Cu o precizie insuficientă în fabricarea unui mecanism cu legături excesive, frecarea în perechile cinematice poate crește foarte mult și poate duce la blocarea legăturilor, prin urmare, din acest punct de vedere, legăturile excesive în mecanisme sunt nedorite.
În ceea ce privește verigile redundante din lanțurile cinematice ale mecanismului, atunci când se proiectează mașini, acestea ar trebui eliminate sau lăsate la o cantitate minimă dacă eliminarea lor completă se dovedește a fi neprofitabilă din cauza complexității designului sau din alte motive. În cazul general, trebuie căutată soluția optimă, ținând cont de disponibilitatea echipamentului tehnologic necesar, costul de fabricație, durata de viață necesară și fiabilitatea mașinii. Prin urmare, aceasta este o sarcină foarte dificilă pentru fiecare caz specific.
Vom lua în considerare metodologia de determinare și eliminare a legăturilor redundante în lanțurile cinematice ale mecanismelor folosind exemple.
Să fie un mecanism plat cu patru brațe cu patru perechi de rotație cu o singură mișcare (Fig. 2.15, A ) din cauza inexactităților de fabricație (de exemplu, din cauza neparalelismului axelor A și D ) s-a dovedit a fi spațială. Asamblarea lanțurilor cinematice 4, 3, 2 și separat 4, 1 nu provoaca dificultati, ci puncte B, B' poate fi plasat pe ax X . Cu toate acestea, pentru a asambla o pereche de rotație LA , format din linkuri 1 și 2 , va fi posibil doar prin combinarea sistemelor de coordonate Bxyz și B ’ x ’ y ’ z ’ , care necesită o deplasare liniară (deformare) a punctului Legătura B’ 2 de-a lungul axei x şi deformaţii unghiulare ale verigii 2 în jurul axelor x și z (indicat prin săgeți). Aceasta înseamnă că există trei legături redundante în mecanism, ceea ce este confirmat și de formula (2.3): . Pentru ca acest mecanism spațial să fie determinabil static, este necesară cealaltă schemă structurală a acestuia, de exemplu, prezentată în Fig. 2.15, b , unde Asamblarea unui astfel de mecanism se va face fără etanșeitate, de la alinierea punctelor B și B' va fi posibil prin mutarea punctului DIN într-o pereche cilindrică.
Este posibilă o variantă a mecanismului (Fig. 2.15,în ) cu două perechi sferice (); În acest caz, în afară demobilitatea de bazăapare mecanismulmobilitatea locală- capacitatea de a roti biela 2 în jurul axei sale soare ; această mobilitate nu afectează legea de bază a mișcării mecanismului și poate fi chiar utilă în ceea ce privește nivelarea uzurii balamalelor: biela 2 în timpul funcționării mecanismului, acesta se poate roti în jurul axei sale din cauza sarcinilor dinamice. Formula Malyshev confirmă că un astfel de mecanism va fi determinat static:

Orez. 2.15
Cel mai simplu și metoda eficienta eliminarea conexiunilor redundante în mecanismele dispozitivelor - folosirea unei perechi superioare cu contact punctual în locul unei legături cu două perechi inferioare; gradul de mobilitate al mecanismului plat în acest caz nu se modifică, deoarece, conform formulei Chebyshev (la):
Pe fig. 2.16, a, b, c este dat un exemplu de eliminare a legăturilor redundante într-un mecanism cu came cu un împingător cu role care se mișcă progresiv. Mecanism (Fig. 2.16, A ) - patru verigi (); cu excepția mobilității principale (rotația camei 1
) există mobilitate locală (rotirea independentă a unei role cilindrice rotunde 3
în jurul axei sale) Prin urmare, . Schema plată nu are conexiuni redundante (mecanismul este asamblat fără interferențe). Dacă, din cauza inexactităților în producție, mecanismul este considerat spațial, atunci cu contact liniar al rolei 3 cu came 1 conform formulei lui Malyshev la , obținem, dar într-o anumită condiție. Pereche cinematică cilindru - cilindru (Fig. 2.16, 6
) când rotația relativă a legăturilor este imposibilă 1, 3 în jurul axei z ar fi o pereche tripartită. Dacă o astfel de rotație, din cauza inexactităților în fabricație, are loc, dar este mică, iar contactul liniar este practic păstrat (în timpul încărcării, patch-ul de contact este aproape de formă dreptunghiulară), atunci aceasta 
perechea cinematică va fi deci patru-mobilă și
Fig.2.17
Reducerea clasei celei mai înalte perechi prin utilizarea unei role în formă de butoi (pereche cu cinci mișcări cu contact punctual, Fig. 2.16,în ), obținem pentru și - mecanismul este determinat static. Cu toate acestea, trebuie amintit că contactul liniar al legăturilor, deși necesită o precizie sporită de fabricație, vă permite să transferați sarcini mai mari decât contactul punctual.
În Fig. 2.16, d, e un alt exemplu este dat de eliminarea conexiunilor redundante într-un angrenaj cu patru brațe (, contactul dinților roților 1, 2 și 2, 3 - liniară). În acest caz, conform formulei Chebyshev, - schema plată nu are conexiuni redundante; conform formulei Malyshev, mecanismul este static nedeterminat, prin urmare, va fi necesară o precizie ridicată de fabricație, în special, pentru a asigura paralelismul axelor geometrice ale tuturor celor trei roți.
Înlocuirea dinților de rulare 2 în formă de butoi (Fig. 2.16, d ), obținem un mecanism determinat static.
Cuplu cinematic conjugarea mobilă a două verigi solide, impunând restricţii asupra mişcării lor relative de către condiţiile de comunicare. Fiecare dintre condițiile de legătură elimină un grad de libertate ,
adică posibilitatea uneia dintre cele 6 mișcări relative independente în spațiu. Într-un sistem de coordonate dreptunghiular, 3 sunt posibile mișcări de translație(în direcția a 3 axe de coordonate) și 3 de rotație (în jurul acestor axe). După numărul de condiţii de comunicare S K. p. sunt împărțite în 5 clase. Numărul de grade de libertate K. p. W=6-S. În cadrul fiecărei clase, articolele K. sunt împărțite în tipuri în funcție de mișcările relative posibile rămase ale legăturilor. După natura contactului legăturilor, K. p. inferioare se disting - cu contact de-a lungul suprafețelor, iar cele superioare - cu contact de-a lungul liniilor sau în puncte. Elementele K. mai mari sunt posibile pentru toate cele 5 clase și multe tipuri; inferior - doar 3 clase și 6 specii ( fig.1
). De asemenea, se face distincție între C.P. închisă geometric și neînchis. orez. unu
), iar în al doilea rând, este necesară o forță de presare pentru închidere, așa-numita. închidere forțată (de exemplu, într-un mecanism cu came). În mod convențional, cuplajele mobile cu mai multe elemente de rulare intermediare (de exemplu, rulmenți cu bile și cu role) și cu elemente deformabile intermediare (de exemplu, așa-numitele balamale fără joc ale dispozitivelor cu arcuri plate) sunt denumite k. orez. 2
). N. Ya. Niberg.
Mare enciclopedia sovietică. - M.: Enciclopedia Sovietică. 1969-1978 .
Vedeți ce este „perechea cinematică” în alte dicționare:
Conectarea a 2 verigi ale mecanismului, permițând mișcarea relativă a acestora. Perechea cinematică, în care legăturile ating suprafața, se numește cea inferioară (de exemplu, o balama de rotație, un glisor de translație și un ghidaj). Pereche cinematică, ...... Dicţionar enciclopedic mare
pereche cinematică- pereche Conectarea a două verigi alăturate, permițând mișcarea relativă a acestora. [Culegere de termeni recomandați. Problema 99. Teoria mecanismelor și mașinilor. Academia de Științe a URSS. Comitetul de terminologie științifică și tehnică. 1984] Teoria subiectelor ...... Manualul Traducătorului Tehnic- kinematinė pora statusas T sritis fizika atitikmenys: angl. pereche cinematică vok. kinematisches Elementenpaar, n rus. pereche cinematică, f pranc. paire cinématique, f … Fizikos terminų žodynas
Conectarea a două legături alăturate, permițându-le să fie legate. trafic. Suprafețe, linii, puncte, către care o legătură poate intra în contact cu o altă legătură, numită. elemente de legătură. K. p. sunt împărțite în inferioare (suprafețe de contact) și superioare ... ... Marele dicționar politehnic enciclopedic
pereche cinematică- pereche cinematică Conectarea a două corpuri rigide ale mecanismului, permițând mișcarea relativă specificată a acestora. Cod IFToMM: 1.2.3 Secțiunea: CONCEPTE GENERALE ALE TEORIEI MECANISMELOR ȘI A MAȘINILOR... Teoria mecanismelor și mașinilor
pereche- pereche cinematică; pereche O conexiune a două legături învecinate, permițând mișcarea relativă de la acestea. două forțe; sistemul de cuplu doi forte paralele, egală în valoare absolută și îndreptată în direcții opuse...
perechea de sus- O pereche cinematică în care mișcarea relativă necesară a legăturilor poate fi obținută numai prin atingerea elementelor sale de-a lungul liniilor și în puncte ... Dicționar terminologic explicativ politehnic





