Exemple progresive. mișcare Tel. Mișcare progresivă - Hypermarket de cunoaștere
mișcare de translație - aceasta este mișcarea mecanică a unui sistem de puncte (corp absolut rigid), în care linia dreaptă care leagă oricare două puncte ale acestui corp, a cărei formă și dimensiuni nu se modifică în timpul mișcării, rămâne paralelă cu poziția sa la orice moment anterior în timp.
Ilustrația de mai sus arată că, contrar afirmației larg răspândite, mișcarea de translație nu este opusul mișcării de rotație, dar în cazul general poate fi considerată ca un set de spire - rotații care nu s-au încheiat. Acest lucru implică faptul că mișcarea rectilinie este o rotație în jurul unui centru de rotație infinit îndepărtat de corp.
În cazul general, mișcarea de translație are loc în spațiul tridimensional, dar principala sa caracteristică - păstrarea paralelismului oricărui segment față de sine, rămâne în vigoare.
Mișcare de translație matematică în felul ei rezultat final este echivalent cu o traducere paralelă.Totuși, considerată ca proces fizic reprezintă o variantă a mișcării elicoidale în spațiul tridimensional (Vezi Fig. 2)
YouTube enciclopedic
1 / 3
Mișcări de translație și rotație.
Cinematica: mișcarea de translație și rotație a unui corp rigid. Centrul de învățare online Foxford
Mișcare progresivă. Punct material
Subtitrări
Exemple de traducere
Translațional mută, de exemplu, un vagon de lift. De asemenea, în prima aproximare, cabina roții Ferris efectuează mișcare înainte. Cu toate acestea, strict vorbind, mișcarea cabinei roții Ferris nu poate fi considerată progresivă.
Una dintre cele mai importante caracteristici ale mișcării unui punct este traiectoria acestuia, în cazul general, care este o curbă spațială, care poate fi reprezentată ca arce conjugate de diverse raze, fiecare emanând din centrul său, a căror poziție se poate modifica. la timp. În limită, linia dreaptă poate fi considerată și ca un arc a cărui rază este egală cu infinitul.
În acest caz, se dovedește că în timpul mișcării de translație în fiecare acest moment timp, orice punct al corpului face o rotire în jurul centrului său instantaneu de rotație, iar lungimea razei la momentul dat este aceeași pentru toate punctele corpului. Vectorii viteză ai punctelor corpului, precum și accelerațiile pe care le experimentează, sunt aceleași ca mărime și direcție.
La rezolvarea problemelor mecanică teoretică este convenabil să considerăm mișcarea unui corp ca adaos de mișcarea centrului masei corpului și mișcare de rotație corpul însuși în jurul centrului de masă (această circumstanță este luată în considerare la formulare
Fig 1. Mișcarea de translație a corpului pe plan de la stânga la dreapta, cu un segment selectat arbitrar în el AB. Mai întâi rectiliniu, apoi curbiliniu, transformându-se în rotație a fiecărui punct în jurul centrului său cu egal pentru un moment dat, vitezele unghiulare și egal valorile razei de viraj. puncte O- centre de viraj instantanee spre dreapta. R- egale pentru fiecare capăt al segmentului, dar diferite pentru diferite momente de timp razele de viraj instantanee.
mișcare de translație- aceasta este mișcarea mecanică a unui sistem de puncte (corp absolut rigid), în care o linie dreaptă care leagă oricare două puncte ale acestui corp, a cărei formă și dimensiuni nu se modifică în timpul mișcării, rămâne paralelă cu poziția sa la orice punct anterior. moment în timp.
Ilustrația de mai sus arată că, contrar afirmației larg răspândite, mișcarea de translație nu este opusul mișcării de rotație, dar în cazul general poate fi considerată ca un set de spire - rotații care nu s-au încheiat. Acest lucru implică faptul că mișcarea rectilinie este o întoarcere în jurul unui centru de viraj infinit îndepărtat de corp.
În cazul general, mișcarea de translație are loc în spațiul tridimensional, dar principala sa caracteristică - păstrarea paralelismului oricărui segment față de sine, rămâne în vigoare.
Din punct de vedere matematic, mișcarea de translație este echivalentă cu translația paralelă în rezultatul final, dar, considerată ca proces fizic, reprezintă o variantă a mișcării elicoidale în spațiul tridimensional (vezi Fig. 2)
Exemple de traducere
Translațional mută, de exemplu, un vagon de lift. De asemenea, în prima aproximare, cabina roții ferris face mișcare de translație. Cu toate acestea, strict vorbind, mișcarea cabinei roții Ferris nu poate fi considerată progresivă.
Una dintre cele mai importante caracteristici ale mișcării unui punct este traiectoria acestuia, în cazul general, care este o curbă spațială, care poate fi reprezentată ca arce conjugate de diverse raze, fiecare emanând din centrul său, a căror poziție se poate modifica. la timp. În limită, linia dreaptă poate fi considerată și ca un arc a cărui rază este egală cu infinitul.
În acest caz, se dovedește că în timpul mișcării de translație la fiecare moment dat de timp, orice punct al corpului face o rotire în jurul centrului său instantaneu de rotație, iar lungimea razei la momentul dat este aceeași pentru toate punctele de rotație. corpul. Vectorii viteză ai punctelor corpului, precum și accelerațiile pe care le experimentează, sunt aceleași ca mărime și direcție.
Când se rezolvă probleme de mecanică teoretică, este convenabil să se ia în considerare mișcarea unui corp ca adaos de mișcarea centrului de masă al corpului și mișcarea de rotație a corpului însuși în jurul centrului de masă (această circumstanță a fost luată în considerare cont la formularea teoremei lui Koenig).
Exemple de dispozitive
Principiul mișcării de translație este implementat în instrumentul de desen -
>>Fizica: Mișcarea corpurilor. mișcare de translație
O descriere a mișcării unui corp este considerată completă numai atunci când se știe cum se mișcă fiecare dintre punctele sale.
Am acordat foarte multă atenție descrierii mișcării punctului. Pentru un punct, conceptele de coordonate, viteză, accelerație, traiectorii. În cazul general, problema descrierii mișcării corpurilor este complexă. Este deosebit de dificil dacă corpurile sunt vizibil deformate în procesul de mișcare. Este mai ușor să descrii mișcarea corpului, aranjament reciproc din care părți nu se schimbă. Un astfel de corp este numit absolut solid. De fapt, nu există corpuri absolut rigide. Dar în acele cazuri în care corpurile reale se deformează puțin în timpul mișcării, ele pot fi considerate ca fiind absolut rigide. (Un alt model abstract introdus atunci când luăm în considerare mișcarea.) Cu toate acestea, mișcarea este, de asemenea, absolut corp solidîn general, se dovedește a fi foarte dificil. Orice mișcare complexă a unui corp absolut rigid poate fi reprezentată ca suma a două mișcări independente: de translație și de rotație.
mișcare de translație. Cea mai simplă mișcare a corpurilor rigide este progresivă.
Translativ numită o astfel de mișcare a unui corp rigid în care orice segment care leagă oricare două puncte ale corpului rămâne paralel cu el însuși.
În mișcarea de translație, toate punctele corpului fac aceleași mișcări, descriu aceleași traiectorii, parcurg aceleași căi, au în fiecare moment egale vitezăși accelerație. Să o arătăm.
Lasă corpul să meargă înainte ( fig.2.1). Conectați două dintre punctele sale arbitrare Bși A segment. Distanța nu se schimbă, deoarece corpul este absolut rigid. În timpul mișcării de translație, modulul și direcția vectorului rămân constante. Ca urmare, traiectoriile punctelor Bși A sunt aceleași, deoarece pot fi complet corelate prin translație paralelă pe vector.
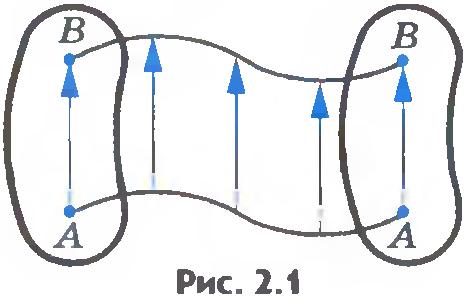
Conform figurii 2.1 puncte de mișcare Ași B sunt aceleași și au loc în același timp. Prin urmare, punctele Ași B au aceeași viteză și accelerație.
Este destul de evident că pentru a descrie mișcarea de translație a unui corp rigid, este suficient să descriem mișcarea oricăruia dintre punctele sale. Numai cu mișcarea de translație putem vorbi despre viteza și accelerația corpului. Cu orice altă mișcare a corpului, punctele sale au viteze diferite și accelerare, iar termenii „viteza corpului” și „accelerarea corpului” pentru mișcarea netranslațională își pierd sensul.
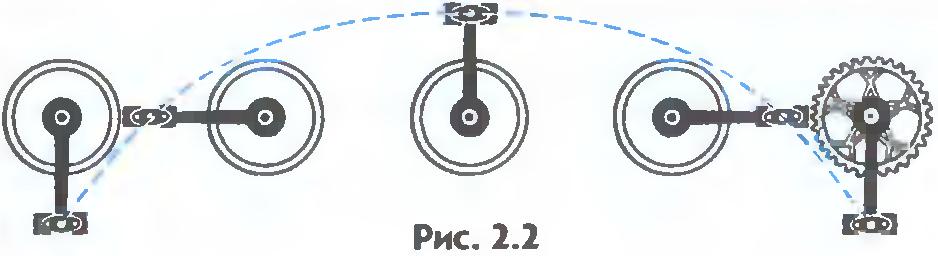
Mutați aproximativ progresiv sertarul biroului, pistoanele motorului mașinii în raport cu cilindrii, mașinile într-o secțiune dreaptă calea ferata, freza strungului relativ la pat. Mișcarea pedalei a unei biciclete sau a cabinei cu roată mare în parcuri ( fig.2.2, 2.3) sunt, de asemenea, exemple de mișcare de translație.

Pentru descriere mișcare înainte a unui corp rigid, este suficient să scrieți ecuația de mișcare a unuia dintre punctele sale.
G.Ya.Myakishev, B.B.Bukhovtsev, N.N.Sotsky, Fizica clasa a 10-a
Conținutul lecției rezumatul lecției suport cadru prezentarea lecției metode accelerative tehnologii interactive Practică sarcini și exerciții ateliere de autoexaminare, traininguri, cazuri, quest-uri teme pentru acasă întrebări discuții întrebări retorice de la elevi Ilustrații audio, clipuri video și multimedia fotografii, imagini grafice, tabele, scheme umor, anecdote, glume, pilde cu benzi desenate, proverbe, cuvinte încrucișate, citate Suplimente rezumate articole cipuri pentru pătuțuri curioase manuale de bază și glosar suplimentar de termeni altele Îmbunătățirea manualelor și lecțiilorcorectarea erorilor din manual actualizarea unui fragment din manualul elementelor de inovare la lecție înlocuirea cunoștințelor învechite cu altele noi Doar pentru profesori lecții perfecte planul calendaristic pentru anul instrucțiuni programe de discuții Lecții integrateDacă aveți corecții sau sugestii pentru această lecție,





