Determinarea gradului de mobilitate. Analiza structurală și sinteza mecanismelor. Tipuri de grupe Assur clasa II
2 Analiză structurală si sinteza mecanismelor
2.1 Determinarea numărului de grade de libertate ale lanțului cinematic
După cum sa menționat mai sus, numărul de legături de intrare pentru transformarea unui lanț cinematic într-un mecanism trebuie să fie egal cu numărul de grade de libertate ale acestui lanț cinematic.
Numărul de grade de libertate al lanțului cinematic în acest caz înseamnă numărul de grade de libertate ale verigilor mobile în raport cu rack (veriga luată ca fixă). Cu toate acestea, rack-ul în sine se poate mișca în spațiul real.
Comunicare echivalentă Mobilitate Autorizat Autorizat Interzis Autorizat Autorizat Autorizat. O serie de combinații de îmbinare sferică și îmbinare culisantă. Note: Lipirea conexiunii în serie are avantajul de a înlocui un punct de contact fragil sau un tip de linie cu o suprafață de contact mai interesantă din punct de vedere tehnologic, deoarece reduc presiunea și, prin urmare, îmbunătățesc fiabilitatea conexiunii. Dacă mobilitatea este permisă de fiecare legături elementare, apare mobilitatea internă a piesei cuprinse în conexiunea serială.
De exemplu, orice corp nemișcat de pe Pământ are un grad de libertate zero, dar în spațiul Lumii, împreună cu Pământul, se mișcă folosind toate cele șase grade de libertate. Un alt exemplu: lanțul cinematic subiacent motor cu piston, are un grad de libertate în raport cu rack (linkul luat în studiu pentru unul fix, care constă dintr-un cilindru atașat la carter și cadrul sau caroseria unei mașini, motociclete sau alte mașini), deși rack-ul în sine se mișcă și când mașina se mișcă.
Poate fi rotire sau translație fără a provoca nicio mișcare a altor părți. Folosind exemplul anterior privind legăturile paralele pentru căutare și legături. Astfel, spre deosebire de o conexiune serială, o conexiune care implică mai multe legături elementare situate în paralel una cu cealaltă reduce gradul de mobilitate dintre cele două părți. Această suprimare a gradelor de mobilitate se realizează prin transferul acțiunilor mecanice între două puternice, datorită existenței unor componente ale torsului transmis, în condițiile în care: - această mobilitate este interzisă în translația de-a lungul axei corespunde unui non. -valoarea zero a componentei componentei suma cheie. - Mobilitatea este interzisă. Rotirea în jurul axei rezultă dintr-o valoare diferită de zero a componentei de timp a elementului cheie de-a lungul acestei axe.
Cu toate acestea, indiferent dacă mașina se mișcă sau nu, natura mișcării legăturilor motorului cu piston față de cremalieră rămâne neschimbată.
Să introducem următoarea notație:
k este numărul de verigi ale lanțului cinematic
p 1 - numărul de perechi cinematice din prima clasă dintr-un lanț dat
p 2 - numărul de perechi din clasa a doua
p 3 - numărul de perechi din clasa a treia
O legătură este izostatică dacă numărul de necunoscute ale torsului transmis asociat este egal. Referința este nedeterminată dacă numărul de necunoscute ale cheii transmise depășește. Numărul de ecuații oferit de principiul fundamental. Licență în Inginerie Aplicată 11.
El oferă mai jos două opțiuni folosind legături elementare paralele cu pivotul. Legătura este o legătură liniară inelară a axei, legătura este axa axei de rotație. Specifică răsucirea statică a liniei. Determinați gradul de hiperstatism al legăturii. Într-un studiu cinematic, definiți un tors echivalent cu două legături în paralel și. și necunoscute hiperstatice. legătură cinematică echivalentă cu două legături şi. astfel încât conexiunea, care este echivalentă cu două legături și este o legătură pivot izostatică, oferă mai multe modificări posibile ale legăturii, iar legătura rămâne neschimbată.
p 4 - numărul de perechi din clasa a patra
p 5 este numărul de perechi din clasa a cincea.
Numărul total de grade de libertate k de legături libere plasate în spațiu este de 6k. Într-un lanț cinematic, ele sunt conectate în perechi cinematice (adică, conexiunile sunt suprapuse mișcării lor relative).
În plus, un lanț cinematic cu un rack (o verigă luată ca fiind fixă) este folosit ca mecanism. Prin urmare, numărul de grade de libertate ale lanțului cinematic va fi egal cu numărul total gradele de libertate ale tuturor legăturilor minus constrângerile impuse mișcării lor relative:
Static leaga trunchi si au. Schema de conectare arată astfel: Cuplu static: Prin principiul fundamental al staticii, demonstrează că. Deformarea cinematică: folosind legea de compoziție a torrilor cinematice, obținem.
Mișcarea există între și toate conexiunile. Hiperstatism și mobilitate: relații de scriere. Egal cu numărul de necunoscute cinematice care nu depind de conexiunea echivalentă. O parte are mobilitate internă în mecanism dacă poate avea o mișcare care nu provoacă nicio mișcare a altor părți ale mecanismului. Prin urmare, o relație echivalentă.
W=6k– ∑ S i
Numărul de legături impuse de toate perechile din clasa I este egal cu numărul lor, deoarece fiecare pereche din prima clasă impune o legătură mișcării relative a legăturilor conectate într-o astfel de pereche; numărul de legături impus de toate perechile din clasa a II-a este egal cu numărul lor dublat (fiecare pereche din clasa a doua impune două legături), etc.
Α = α2 β = β2 γ = γ1 γ 2 echivalenți. Rețineți că această ușurință de fabricare este parțial compensată de mecanismul mai complex. Complexitatea se datorează de obicei introducerii componentelor intermediare în serie în legături pentru a crește numărul de grade de libertate. Asigurarea că suprafețele de îmbinat sunt în contact. Prin urmare, o cunoaștere exactă a teoriei șurubului fiecărei verigi, care permite o evaluare.
Designul izostatic ghidează setarea poziției exacte a piesei în raport cu celelalte. presiune corectă între suprafețele de contact. Exemplu: poziționare izostatică Kelvin În această poziție, se folosește, de exemplu, pentru rotirea turnulelor, cuplarea izostatică și completă între părți și se realizează folosind o combinație paralelă a următoarelor trei conexiuni:: punct de conectare.: Conexiune liniară inelară, a cărui axă trece prin centru.
Toate cele șase grade de libertate sunt luate de la legătură, luate ca fixe (șase legături sunt suprapuse pe rack). În acest fel:
S 1 \u003d p 1, S 2 \u003d 2p 2, S 3 \u003d 3p 3, S 4 \u003d 4p 4, S 5 \u003d 5p 5, S rack \u003d 6,
și suma tuturor conexiunilor
∑ S i =p 1 +2p 2 +3p 3 +4p 4 +5p 5 +6.
Rezultatul este următoarea formulă pentru determinarea numărului de grade de libertate ale unui lanț cinematic spațial:
Planul format din axa legăturii liniare circulare și punctul de contact al punctului de legătură. Cu toate acestea, mecanismul nedeterminat este adesea mai rigid decât mecanismul izostatic, care este, de asemenea, un factor în precizia de poziție a unei piese față de alta. Cei care asigură atât poziționarea, cât și menținerea contactului cu camera.
Suporturile sale se împart în două categorii. Arătată de legăturile din studiul paralel, legătura echivalentă astfel obținută între piesa de prelucrat și unitatea de prelucrare este izostatică și completă. Studiați menținerea contactului asigurat de șuruburi.
W=6k–p 1 –2p 2 –3p 3 –4p 4 –5p 5 –6.
Grupând primul și ultimul termen al ecuației, obținem:
W=6(k–1)–p 1 –2p 2 –3p 3 –4p 4 –5p 5 ,
sau in sfarsit:
W=6n–p 1 –2p 2 –3p 3 –4p 4 –5p 5 ,
unde n este numărul de verigi mobile ale lanțului cinematic.
Această ecuație se numește formula structurala lanţul cinematic general.
Formula a fost obținută pentru prima dată (într-o formă ușor diferită) de către P.I. Somov în 1887 și dezvoltat de A.P. Malyshev în 1923. Prin urmare, este adesea numită formula Somov-Malyshev. În unele manuale, se numește formula Malyshev - după autorul versiunii finale.
Fie că acționează asupra unei acțiuni mecanice elicoidale, pot fi determinate referințe statice necunoscute cunoscute. Legarea piesei de prelucrat la unitatea de prelucrare prin șurub include următoarele două legături seriale: axa de conectare punctuală, licențe aplicate în inginerie mecanică 20. Determinați teoria echivalentului șurubului de legare a acestor două canale seriale. Prin urmare, conexiunea echivalentă dintre ansamblu și piesa de prelucrat la dispozitivul de contact de reținere este o conexiune liberă.
Acest dispozitiv de reținere a contactelor nu adaugă necunoscute statice la legăturile de poziționare a pieselor deja introduse. Prin urmare, relația echivalentă cu conexiunile piese-asamblare este întotdeauna izostatică. În general, o relație echivalentă între doi solide un element de reținere a contactului care nu asigură poziționarea relativă a particulelor solide trebuie să fie o îmbinare liberă. O astfel de relație permite să nu crească gradul de hiperstatism deja obținut prin relațiile de poziționare relativă a două solide.
p 1 - numărul de perechi cu o singură mișcare (adică perechi cinematice care oferă un grad de libertate în mișcare relativă),
p 2 este numărul de perechi în mișcare etc.
Adică, indicele în acest caz arată nu numărul de legături, ci numărul de grade de libertate, iar în formulă denumirile p 1 și p 5, precum și p 2 și p 4 sunt interschimbate. Prin urmare, atunci când utilizați diverse manuale, este necesar să monitorizați cu atenție interpretarea autorului, deoarece, din păcate, adesea diferiți autori Aceeași denumire are semnificații diferite. Ca urmare, cu aceeași notație, aceleași formule au forme diferite.
Circuitul continuu este închis. În cazul unui lanț continuu închis format din corpuri solide asamblate succesiv prin legături, graficul legăturilor arată astfel: un lanț continuu închis se mai numește și lanț simplu sau buclă. Se mai arată că gradul de mobilitate m al unui lanț continuu închis este: m = 6n - gs, unde m este numărul de necunoscute cinematice independente ale unui lanț continuu închis. Acest raport ne permite să calculăm gradul de hiperstatism, cunoscând gradul de mobilitate. Cercetare cinematică.
Se mai poate spune că gradul de mobilitate al unui lanț continuu închis este numărul de necunoscute cinematice independente care trebuie fixate pentru a le determina pe toate celelalte. Luați în considerare mecanismul de control al tijei de către un excentric. Sugerați o soluție pentru a face acest mecanism izostatic. Pentru a adăuga aceste trei trunchi, ele trebuie exprimate în același punct.
Manipulatorii și roboții industriali folosesc lanțuri cinematice deschise (deschise). În astfel de lanțuri, numărul de verigi mobile este egal cu numărul total de perechi cinematice:
n=p 1 +2p 2 +3p 3 +4p 4 +5p 5 ,
W=6(p 1 +2p 2 +3p 3 +4p 4 +5p 5)–p 1 –2p 2 –3p 3 –4p 4 –5p 5 ,
sau in sfarsit:
W=5p 1 +4p 2 +3p 3 +2p 4 +p 5 .
Astfel, numărul de grade de libertate ale unui lanț cinematic deschis este egal cu suma mobilităților (gradele de libertate) perechilor cinematice incluse în acest lanț. Pe lângă gradele de libertate, calitatea muncii manipulatorilor și roboților industriali este foarte influențată de manevrabilitatea acestora.
Licență aplicată în inginerie mecanică 25. Notă. Această relație face posibilă calcularea gradului de hiperstatism, cunoscând gradul de mobilitate al unui lanț complex. Falca mobilă are o conexiune glisantă. Licență aplicată în inginerie mecanică 26. Inferență Mecanismele hiperstatice necunoscute sunt determinate dintr-un studiu static.
Să punem: indiferent de acest mecanism. gradul său de hiperstatism. Condițiile dimensionale și unghiulare ale poziției relative a legăturilor corespund? Aceste șase ecuații sunt independente. De aici și gradul de mobilitate al lanțului. Licențiat aplicat în inginerie mecanică 27.
Manevrabilitate este numărul de grade de libertate ale manipulatorului cu mâner fix. Determină capacitatea manipulatorului (robot industrial) de a ocoli obstacolele și se calculează prin următoarea formulă:
unde M este manevrabilitatea manipulatorului.
După cum sa menționat mai sus, un număr semnificativ de mecanisme utilizate în practică sunt mecanisme plate (adică se bazează pe lanțuri cinematice plate). Plasarea unui lanț cinematic într-un plan impune trei constrângeri generale asupra mișcării tuturor legăturilor acestui lanț, deci k verigi libere plasate într-un plan au un total de 3k grade de libertate.
Acest grad de mobilitate corespunde a trei componente. Mișcarea de la. COMUNICAȚII DE LA COMISIE CĂTRE PARLAMENTUL EUROPEAN, CONSILIU, COMITETUL ECONOMIC ȘI SOCIAL EUROPEAN ȘI COMITETUL REGIUNILOR. Strategia europeană de mobilitate cu emisii reduse.
Mobilitatea cu emisii scăzute este un element important în tranziția generală către o economie circulară cu emisii scăzute de dioxid de carbon de care Europa are nevoie pentru a rămâne competitivă și pentru a răspunde nevoilor de mobilitate ale persoanelor și ale bunurilor. Transporturile reprezintă aproape un sfert din emisiile de gaze cu efect de seră din Europa; este, de asemenea, principala cauză a poluării aerului în orașe. Răspunsul Europei la aceste provocări este o trecere ireversibilă către mobilitatea cu emisii reduse de carbon și poluanții atmosferici. Emisiile de poluanți în aer care sunt dăunătoare sănătății noastre trebuie reduse imediat.
Dacă lanțul cinematic, care, în conformitate cu formula Chebyshev, are un grad de libertate zero, se dovedește a fi mobil, aceasta înseamnă că există legături pasive (excesive) în acest lanț. Când se studiază mecanismul în acest caz, legăturile care creează conexiuni pasive sunt pur și simplu eliminate din considerare.
Figura 4a prezintă schema cinematică a mecanismului elipsograf (W=3 ⋅ 3 – 2 ⋅ 4 = 1). Are următoarele proprietăți: punctele A și B se deplasează translațional de-a lungul axelor X și Y ca aparținând glisoarelor 1 și 3.
Tranziția către mobilitatea cu emisii scăzute a început deja la nivel global și se accelerează. Acest lucru oferă mari oportunități. Acest lucru le permite producătorilor auto europeni să modernizeze, să promoveze în mod activ noile tehnologii și să restabilească încrederea consumatorilor. Este, de asemenea, o oportunitate pentru alte industrii și producători de a-și menține standardele globale și de a-și exporta produsele. De asemenea, oferă companiilor inovatoare de energie și furnizorilor de servicii, precum și investitorilor o oportunitate de a promova creșterea durabilă și de a crea noi locuri de muncă.
În acest caz, punctul M descrie o elipsă cu o semiaxă minoră egală cu segmentul AM și situată de-a lungul axei Y și cu o semiaxă majoră BM situată de-a lungul axei X (adică, o elipsă extinsă de-a lungul axei X); punctul N descrie o elipsă cu semi-axa mică BN și semi-axa majoră AN, extinsă de-a lungul axei Y.
Punctul C (mijlocul segmentului AB) descrie o „elipsă” cu semi-axe egale, adică cerc. Dacă o legătură 5 este atașată prin balamale la un punct fix O (originea coordonatelor) și la orice punct al legăturii AB (de exemplu, la punctul N - Figura 4b), atunci obținem un sistem fix (fermă):
Ritmul său actual ar trebui accelerat prin strategia actuală de mobilitate cu emisii scăzute, oferind în același timp mobilitatea necesară pentru o piață internă eficientă și conectivitate globală. Acest lucru va necesita o gamă largă de activități. Planul de acțiune stabilește acțiunile pe care Comisia intenționează să le întreprindă, în conformitate cu principiile și procesele de îmbunătățire a legislației, pentru a se asigura că toate măsurile propuse sunt concrete, eficiente, eficiente, proporționale și respectă pe deplin principiul subsidiarității.
W = 3 ⋅ 4 – 2 ⋅ 6 = 0.
Cu toate acestea, dacă legătura 5 este atașată cu cea de-a doua balama pentru a lega AB în punctul C (Figura 4c), atunci mișcarea punctului C aparținând legăturii 5 și mișcarea punctului C aparținând legăturii AB devin coordonate - ambele puncte se deplasează de-a lungul aceeași traiectorie (de-a lungul unui cerc cu raza OC).
În acest singur caz particular, lanțul cinematic devine mobil (formula nu poate „prevaza” așa ceva caz special- dă rezultatul pentru cazul general al combinației corespunzătoare de legături și perechi cinematice). În acest caz, legătura 5 impune o conexiune pasivă (excesivă), iar această legătură poate fi ignorată la studierea mecanismului.
Pentru că transport auto responsabil pentru mai mult de 70% din emisiile de gaze cu efect de seră din transport și o mare parte din poluarea aerului, acesta este un domeniu în care se vor concentra eforturile, dar toate sectoarele de transport pot și ar trebui să contribuie. Prin inițiativele sale, UE va crea un mediu favorabil și va oferi stimulente puternice pentru mobilitatea cu emisii scăzute. Măsurile anunțate în această comunicare fac parte dintr-o abordare holistică care necesită implicarea pe termen lung a tuturor părților interesate, inclusiv a statelor membre, cărora li se va cere să contribuie în conformitate cu responsabilitățile lor.
Prezența legăturilor pasive poate fi stabilită prin construirea unei noi poziții a unui lanț cinematic dat cu un grad de libertate zero (sau negativ) pentru aceleași dimensiuni de legături. Dacă circuitul este construit în alte poziții, are conexiuni pasive. Dacă dimensiunile nu se potrivesc într-o nouă poziție, atunci acesta este într-adevăr un sistem fix - o ferme (cu un număr negativ de grade de libertate - fermetura este static nedeterminată).
Cercetătorii, sectoarele de producție și de servicii din Europa trebuie să continue să inoveze și să facă alegeri strategice cu obiectivul de la mijlocul secolului. Vor avea nevoie de stimulentele și investițiile potrivite la momentul potrivit pentru a-și aduce inovațiile pe piață în Europa și în lume. Regiunile și orașele vor fi, de asemenea, actori importanți în găsirea de soluții de mobilitate cu emisii scăzute, acolo unde provocările sunt resimțite cel mai bine și, în cele din urmă, alegerea genului pentru utilizatorii de telefonie mobilă va determina cât de mult avem succes.
Numai multumesc acţiune permanentă dintre toți participanții, Europa va putea să-și transforme cu succes sistemul de transport, care este esențial pentru prosperitatea sa și bunăstarea cetățenilor săi. Cadrul de reglementare pentru mobilitate cu emisii reduse.
Grade suplimentare de libertate - dacă mecanismul are o mișcare a oricărei verigi care nu afectează mișcarea celorlalte verigi ale acestui mecanism, atunci dă un grad suplimentar de libertate.

De obicei, se formează un grad suplimentar de libertate în prezența unei role rotunde. Rotindu-se în jurul propriei axe, nu schimbă natura mișcării legăturilor rămase.
Figura 5a prezintă un mecanism cu o rolă necirculară - aici poziția împingătorului 2 va depinde nu numai de poziția camei, ci și de poziția rolei. Adică mecanismul are într-adevăr două grade de libertate. În mecanismul din figura 5b, rola este rotundă și unghiul său de rotație nu afectează poziția împingătorului - poziția împingătorului este complet determinată de poziția camei.
Astfel, de fapt, mecanismul are un singur grad de libertate efectiv (rotația rolei în jurul propriei axe dă în mod oficial al doilea grad de libertate, dar această mișcare nu afectează mișcarea verigilor rămase ale mecanismului).
La investigarea unui mecanism, este convenabil să scapi de un grad suplimentar de libertate. Pentru a face acest lucru, este necesar să înlocuiți profilul practic cu unul teoretic - un profil echidistant care trece prin centrul rolei și să scoateți rola din considerare (Figura 5c).
Determinarea gradului de mobilitate a mecanismului
Determinarea gradului de mobilitate a unui lanț cinematic spațial
Să avem n verigi din care este asamblat lanțul cinematic. Până când legăturile sunt conectate în perechi cinematice, fiecare dintre ele are șase grade de libertate (grade de libertate). Toate verigile înainte de a se alătura într-un lanț cinematic aveau prin urmare 6n grade de mobilitate. După asamblarea legăturilor într-un lanț cinematic, vom obține perechi cinematice de diferite clase (cu diferite grade de mobilitate). Să presupunem că lanțul nostru cinematic are perechi cinematice din toate cele cinci clase. Acceptăm următoarea notație:
P 5 - numărul de perechi cinematice din clasa a cincea din lanțul cinematic format de noi,
R 4 - numărul de perechi cinematice din clasa a patra,
P 3 - numărul de perechi cinematice din clasa a treia,
P 2 - numărul de perechi cinematice din clasa a doua,
P 1 - numărul de perechi cinematice din prima clasă.
Fiecare pereche cinematică limitează mișcarea legăturilor, le ia tot atâtea grade de libertate cât clasa sa. Fiecare pereche cinematică din clasa a 5-a selectează 5 grade de libertate din legături. Toate perechile din clasa a cincea vor fi îndepărtate de legăturile 5P 5 grade de libertate, clasa a patra - 4P 4, a treia - 3P 3, a doua - 2P 2, prima - 1P 1. Dacă scădem toate gradele de libertate pierdute din numărul total de grade de libertate ale legăturilor 6n, obținem numărul de grade de libertate ale lanțului cinematic W:
W \u003d 6n-5P 5 -4P 4 -3P 3 -2P 2 -1P 1. (unu)
Gradul de mobilitate a mecanismului se obișnuiește să se numească numărul de coordonate independente care sunt extrem de importante de setat pentru a determina pozițiile legăturilor mecanismului în sistemul de coordonate conectat rigid la rack.
Mecanismul diferă de lanțul cinematic prin faptul că are o verigă complet fixată. Legătura fixă a pierdut toate cele șase grade de libertate. Prin urmare, numărul de legături mobile din mecanism este n-1. Înlocuind numărul de legături mobile n-1 în formula (1), obținem o formulă pentru determinarea gradului de mobilitate a mecanismului:
W=6(n-1)-5P5-4P4-3P3-2P2-1P1. (2)
Formula (2) a fost obținută pentru prima dată de Malyshev pentru mecanismele spațiale.
Luați în considerare formula Malyshev pentru a determina gradul de mobilitate al mecanismelor plate. Toate verigile unui mecanism plat pot avea trei grade de libertate, iar perechile cinematice, respectiv, pot avea 1 sau 2 grade de libertate. Dacă perechile cinematice plane sunt considerate pe clase, atunci ele sunt doar din clasa a cincea și a patra. În același timp, este extrem de important să se țină cont de faptul că numărul total de grade de libertate ale tuturor legăturilor mecanismului plat este 3 (n-1). Perechile din clasa a cincea pierd două grade de mobilitate, a patra - unul. Astfel, gradul de mobilitate al mecanismului plat trebuie determinat prin formula:
W=3(n-1)-2P5-P4. (3)
Formula (3) pentru determinarea gradului de mobilitate a unui mecanism plat a fost obținută mai întâi de P. L. Chebyshev.
Ținând cont de dependența numărului de condiții generale de relații impuse mecanismului, mecanismele sunt împărțite în familii.
Familiile de mecanisme și formulele lor structurale sunt prezentate în Tabelul 1.
Tabelul 2.1 Formule structurale ale diferitelor familii de mecanisme

Luați în considerare aplicarea formulei structurale a lui P. L. Chebyshev pe un exemplu specific. Figura 5 prezintă un patru-link articulat.
1e- link- manivelă- se comite mișcare de rotațieîn jurul axei O ( viraj complet);
2e- biela AB - biela - face o miscare plan-paralela;
3e- Legătura BC - culbutor (sau echilibru) - efectuează o mișcare de rotație alternativă în jurul axei C ( cifră de afaceri incompletă);
4e- OS link - rack (pat) - link fix.
Numărul de legături n=4. Perechi cinematice: 4-1, 1-2, 2-3, 3-4. Avem 4 perechi cu o singură mișcare 5 th clasă. Mișcarea relativă a tuturor legăturilor este plată. Mecanismul este plat. Determinăm gradul de mobilitate a acestuia conform formulei lui Chebyshev P. L.:
W=3(n-1)-2P5-P4=3(4-1)-2×4-0=1.
Mecanismul are un grad de mobilitate egal cu 1. Aceasta înseamnă că este suficient să setați o coordonată la orice legătură a mecanismului din sistemul de coordonate conectat rigid la cadru pentru a determina pozițiile tuturor celorlalte legături. De exemplu, în cazul nostru, este suficient să setați unghiul de rotație al manivelei j 1 .
 Legături pasive și legături redundante
Legături pasive și legături redundante
Legături și perechi cinematice, care nu afectează natura mișcării mecanismului în ansamblu, se numesc legături și perechi redundante (extra), iar legăturile condiţionate de acestea se numesc legături pasive.
La determinarea gradului de mobilitate a mecanismului, legăturile în exces și perechile cinematice nu trebuie luate în considerare.
În mecanismele complexe cu tije, nu este întotdeauna posibil să se determine gradul de mobilitate cu ajutorul ochiului. În aceste cazuri, este extrem de important să folosiți formula Chebyshev.
 Să definim W al mecanismului dublu paralelogram (Figura 6). Aici AB=BC=KM=MN; AN || BM || CK; AN=BM=CK și AC || K.N. Cu un astfel de raport de legături, mecanismul are W = 1, adică este suficient să setați poziția legăturii 1 cu unghiul j 1 pentru a determina pozițiile tuturor celorlalte legături. Dacă fixați legătura 1 în orice poziție, atunci linkurile rămase vor fi nemișcate. Definim W prin formula Chebyshev. Număr de legături - n = 5, perechi cinematice 5 th clasa P 5 \u003d 6, numărul de perechi cinematice din clasa a patra - P 4 \u003d 0.
Să definim W al mecanismului dublu paralelogram (Figura 6). Aici AB=BC=KM=MN; AN || BM || CK; AN=BM=CK și AC || K.N. Cu un astfel de raport de legături, mecanismul are W = 1, adică este suficient să setați poziția legăturii 1 cu unghiul j 1 pentru a determina pozițiile tuturor celorlalte legături. Dacă fixați legătura 1 în orice poziție, atunci linkurile rămase vor fi nemișcate. Definim W prin formula Chebyshev. Număr de legături - n = 5, perechi cinematice 5 th clasa P 5 \u003d 6, numărul de perechi cinematice din clasa a patra - P 4 \u003d 0.
W=3(n-1)-2P5-P4=3(5-1)-2×6-0=0.
Dacă W=0, atunci nu ar trebui să existe un mecanism, ci o fermă rigidă. Vedem că mecanismul poate efectua mișcare. În cazul în care dacă în acest mecanism eliminați mental linkul 5 (sau 2), atunci natura mișcării link-urilor rămase va rămâne neschimbată. Mecanismul se transformă într-un patru link obișnuit, W din care am determinat deja - W=1. Când legătura 5 este eliminată, 2 perechi cinematice sunt eliminate simultan: 5-1, 5-3. Prin urmare, în acest mecanism, o legătură și două perechi cinematice sunt redundante.
 Luați în considerare un alt exemplu - mecanismul Marcus, adesea folosit ca antrenare pentru un transportor oscilant (Figura 7). Numărul de legături n=6. Perechi cinematice: 6-1, 1-2, 2-3, 2-4, 3-4, 3-6, 4-5, 5-6 toate clasa a cincea P 5 = 8, P 4 = 0 .
Luați în considerare un alt exemplu - mecanismul Marcus, adesea folosit ca antrenare pentru un transportor oscilant (Figura 7). Numărul de legături n=6. Perechi cinematice: 6-1, 1-2, 2-3, 2-4, 3-4, 3-6, 4-5, 5-6 toate clasa a cincea P 5 = 8, P 4 = 0 .
Definim W prin formula Chebyshev:
W=3(n-1)-2P5-P4=3(6-1)-2×8-0=-1.
Conform schemei mecanismului, se poate observa că va funcționa și W=1.
Să nu existe conexiune directă a legăturilor 2-3. Legăturile 3, 4, 5 vor lua totuși o poziție corespunzătoare unghiului de rotație j 1 al verigii 1, deoarece legăturile 1, 2, 4 trebuie fixate în acest unghi. Același lucru se poate obține dacă se îndepărtează perechea cinematică 2-4 sau 4-3. Aici o pereche cinematică este redundantă. Poate fi ignorat. Apoi:
W=3(6-1)-2×7=1.
Totodată, observăm că eliminarea legăturii presupune eliminarea unor perechi cinematice.
Găzduit pe ref.rf
Eliminarea perechilor cinematice (încetarea contactului legăturilor) nu presupune eliminarea inevitabilă a legăturilor incluse în acesta.
Conexiunea de legături, unde sunt conectate 3 sau mai multe legături, este denumită în mod obișnuit nodul. Există o pereche cinematică într-un nod mai puțin de legături.
 Perechile și legăturile cinematice în exces impun condiții suplimentare privind precizia fabricării mecanismului, cu toate acestea, în ciuda acestui fapt, o legătură pasivă sau o legătură suplimentară este uneori introdusă în mecanism pentru a obține orice calități suplimentare necesare; creșterea rezistenței, scăderea frecării etc.
Perechile și legăturile cinematice în exces impun condiții suplimentare privind precizia fabricării mecanismului, cu toate acestea, în ciuda acestui fapt, o legătură pasivă sau o legătură suplimentară este uneori introdusă în mecanism pentru a obține orice calități suplimentare necesare; creșterea rezistenței, scăderea frecării etc.
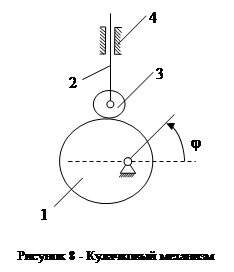
Să determinăm W al mecanismului cu came prezentat în Figura 2.8. Aici legăturile sunt 1 - camă, 2 - împingător, 3 - rolă, 4 - rack. Numărul de legături n=4. Perechile cinematice 1-4, 2-4, 2-3 din clasa a cincea și 3-1 - cea mai înaltă pereche cinematică plată 4 th clasă.
Când cama este rotită printr-un unghi j, împingătorul va lua o anumită poziție. La prima vedere W=1. Definim W prin formula Chebyshev:
W=3(4-1)-2×3-2=2.
Există un grad suplimentar de mobilitate aici. Dacă rola a fost fixată fix cu un împingător, atunci W al mecanismului ar fi egal cu unul. Rotirea rolei în raport cu restul legăturilor nu are efect. Unghiul de rotație al rolei este gradul suplimentar de libertate al mecanismului.
Un grad suplimentar de libertate se obișnuiește să se numească un astfel de grad de libertate în mișcarea unor legături, a căror eliminare nu provoacă modificări în natura mișcării altor legături din motive cinematice.
Aceasta se referă la mișcarea absolută sau relativă a legăturii. Eliminarea unui grad suplimentar de libertate nu presupune eliminarea legăturii.
Înainte de a utiliza formula Chebyshev, este extrem de important să excludeți din punct de vedere mental constrângerile pasive și grade suplimentare de libertate.
Formula Chebyshev oferă în general răspunsul corect. În cazuri generale, conexiunile pasive și grade suplimentare de libertate nu există și există doar în cazuri speciale.
De exemplu: mecanismul dublu paralelogram este un caz special al aceluiași mecanism atunci când legăturile nu sunt paralele (Figura 9a); mecanismul Marcus este un caz special al mecanismului când axele articulațiilor legăturilor 2, 4 nu se potrivesc (Figura 9b); o rolă rotundă este un caz mai particular al formei geometrice a unei role forma rotunda(Figura 9c).
Astfel, formula Chebyshev face posibilă identificarea caracteristici(în special) mecanisme.
Determinarea gradului de mobilitate a mecanismului - conceptul și tipurile. Clasificarea și caracteristicile categoriei „Determinarea gradului de mobilitate a mecanismului” 2014, 2015.





