Mekanizmaların yapısal analizi. kinematik çift
Kinematik bir çift kavramı
kinematik çift iki bağlantının hareketli bağlantısı olarak adlandırılır. Kinematik çiftler çeşitli kriterlere göre sınıflandırılır:
1) bir kinematik çiftte bağlanan bağlantıların bağıl hareketi üzerine bindirilen bağların sayısına göre. Bu temelde, kinematik çiftler sınıflara ayrılır. Aşağıdaki atamalar kabul edilir:
W, serbestlik derecesi sayısıdır
S, bağlantıların göreli hareketi üzerine bindirilmiş bağların sayısıdır.
Uzayda serbest bir bağlantının altı serbestlik derecesi vardır. Bağlantılar bağlandığında, bu serbestlik derecelerinin bir kısmı alınır ("bağlantılar yüklenir"). Üst üste binen bağların sayısı ile bağlantıların göreli hareketinde kalan serbestlik derecesi sayısı arasındaki ilişki açıktır:
veya
S=6–B,
bu nedenle, beş kinematik çift sınıfı vardır (altı serbestlik derecesini de alırsanız, sabit bir bağlantı elde edersiniz).
Şekil 2, bazı kinematik çiftlerin örneklerini göstermektedir.
| a) |
S \u003d 1 \u003d\u003e I sınıfı.
|
S \u003d 2 \u003d\u003e II sınıfı.
|
S \u003d 3 \u003d\u003e III sınıfı.
|
 b)
b)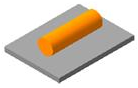 içinde)
içinde)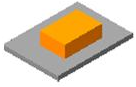 G)
G)şekil 2
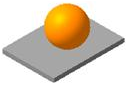
Uçağa göre top (Şekil 2b), onu terk etmeden, "X" ve "Y" eksenleri boyunca hareket etmenin yanı sıra, üç koordinat ekseninin tümü etrafında dönme hareketleri gerçekleştirebilir. "Z" ekseni boyunca hareket ederken, top uçaktan çıkacaktır, yani. iki serbest bağlantı olacak - kinematik çiftin varlığı sona erecek. Böylece, bir bağlantı, bağlantıların göreli hareketi üzerine bindirilir - bu bir sınıf I kinematik çiftidir.
Benzer şekilde, temasın doğası bozulmadan silindir "Z" ekseni boyunca hareket ettirilemez ve "Y" ekseni etrafında döndürülemez (Şekil 2c), yani. bağ sayısı ikidir - bir çift sınıf II. Başka bir düzleme göre bir düzlem, "X" ve "Y" eksenleri boyunca ötelemeli olarak hareket edebilir ve ayrıca temasın doğasını bozmadan "Z" ekseni etrafında dönebilir. İmkansız ileri hareket"Z" ekseni boyunca ve "X" ve "Y" eksenleri etrafında dönme hareketleri (Şekil 2d). Böylece bağ sayısı üç - bir sınıf III kinematik çiftidir.
Not: Bir kinematik çiftin iki işlevi varsa ilgili hareketler(biri olmadan diğeri olmaz), bir derece serbestlik verirler.
Örneğin, bir cıvata ve bir somun, beşinci sınıfın kinematik bir çiftini oluşturur. Bu durumda, somunun sabit bir cıvata ile iki hareketi vardır - cıvatanın ekseni etrafında dönme hareketi ve bu eksen boyunca öteleme hareketi, ancak somunu döndürmeden eksen boyunca hareket ettiremezsiniz veya somunu döndüremezsiniz. eksen boyunca hareket etmez. Ayrıca, dişin parametrelerini bilerek, dönme açısı ile somunun öteleme hareketi arasındaki ilişkiyi belirlemek kolaydır.
Bu iki hareket, tek bir karmaşık (bu durumda sarmal) hareket oluşturur. Bu bağlantıların göreli hareketinde bir serbestlik derecesi belirler, yani. bağlantı sayısı beştir;
2) kinematik bir çiftte bağlanan bağlantıların temasının doğasına göre. Bu temelde, kinematik çiftler daha yüksek ve daha düşük olarak ayrılır. Daha yüksek çiftler, bu kinematik çifti oluşturan bağlantıların bir nokta veya doğrusal temasına sahiptir.
Alt çiftte, bağlantılar bir yüzey boyunca (belirli bir durumda, bir düzlem boyunca) birbirleriyle temas halindedir.
Daha düşük kinematik çiftler daha büyük taşıma kapasitesine sahiptir, tk. geniş bir temas alanına sahip (üst çiftte, temas alanı teorik olarak sıfıra eşittir, ancak gerçekte kinematik çiftin elemanları - “temas noktası”) nedeniyle elde edilir. Ancak alt çiftlerde, bir yüzey çalışma sırasında diğerine göre kayar, daha yüksek çiftlerde ise hem kayma hem de yuvarlanma meydana gelebilir.
Kural olarak, kaymaya karşı direnç, bir yüzeyin diğerine göre yuvarlanma direncinden daha büyüktür, yani. Üst çiftteki (sadece haddeleme kullanılıyorsa) sürtünme kayıpları alt çifttekinden daha azdır (bu nedenle, katsayıyı artırmak için faydalı eylem kaymalı yataklar genellikle rulmanlı yataklarla değiştirilir).
Şekil 2b ve 2c'de gösterilen kinematik çiftler en yüksek, Şekil 2d'deki çift ise en düşük kinematik çifttir;
3) kinematik çifti oluşturan bağlantılara ait noktaların hareket yörüngesi boyunca. Bu temelde, uzaysal ve düz kinematik çiftler ayırt edilir.
Düz bir kinematik çiftte, tüm noktalar bir veya paralel düzlemde hareket eder ve hareketlerinin yörüngeleri düz eğrilerdir. Uzamsal çiftlerde, noktalar farklı düzlemlerde hareket eder ve uzaysal eğriler şeklinde yörüngeleri vardır.
Pratikte kullanılan önemli sayıda mekanizma düz mekanizmalardır (I.I. Artobolevsky - üçüncü ailenin mekanizmalarının sınıflandırmasına göre), bu nedenle düz kinematik çiftleri daha ayrıntılı olarak düşünmek gerekir.
Bir düzleme yerleştirilen serbest bir bağlantının üç serbestlik derecesi vardır (koordinat eksenleri boyunca öteleme hareketi ve verilen düzleme dik bir eksen etrafında dönme hareketi). Bu nedenle, bir düzleme bir bağlantı yerleştirmek, ondan üç derecelik serbestlik alır (üç bağ yükler). Ancak bu bağlantının bir kinematik çiftte başka bir bağlantıyla bağlantısı, göreli harekete daha fazla bağlantı yükler (minimum sayı 1'dir). Sonuç olarak, düzlemde göreli harekette iki veya bir serbestlik derecesine sahip sadece kinematik çiftler var olabilir.
Genel sınıflandırmaya göre bunlar dördüncü ve beşinci sınıf çiftleridir. Beşinci sınıfın en basit çiftleri yalnızca bir hareket sağlar - dönme veya öteleme (teknolojide dönme kinematik çiftine menteşe denir, öteleme çifti, öteleme hareketli bir bağlantıya benzetilerek bazen kaydırıcı olarak da adlandırılır).
Bir düzlemde göreli harekette iki serbestlik derecesi genellikle iki temas profili sağlar (kinematik diyagramda, bir noktada temas; gerçek bir mekanizmada bu, bir noktaya yansıtılan bir çizgi olabilir). Böylece, beşinci sınıfın düz kinematik çiftleri (menteşeler ve sürgüler) aynı anda daha düşük çiftlerdir ve dördüncü sınıfın kinematik çiftleri daha yüksek çiftlerdir.
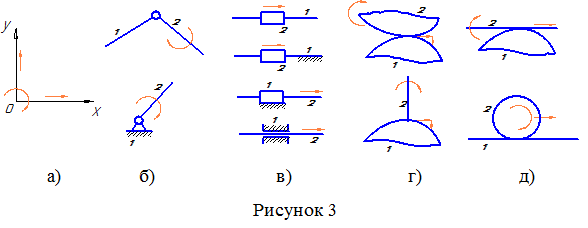
Şekil 3, düz kinematik çiftlerin şematik bir temsilini göstermektedir.
4) kinematik bir çiftte bağlanan bağlantıların kapanmasının doğasına göre. Bu açıdan birbirinden farklılık gösteren iki tür kinematik çift vardır. Geometrik kapamalı kinematik çiftler ve kuvvet kapamalı kinematik çiftler.
Pozitif kilitlemeli çiftlerde, bağlantıların konfigürasyonu, çalışma sırasında ayrılmalarını önler. Örneğin, biyel kolu kapağı veya başka herhangi bir menteşe (söveli kapı, pencere çerçeveli pencere vb.) kullanarak biyel kolunu krank miline bağlamak.
Güç devreli çiftlerde, çalışma sırasında bağlantıların teması sürekli olarak sağlanır aktif kuvvet. Şekil 2'de, tüm kinematik çiftler, kapanma kuvveti olan çiftlerdir ve ağırlık, kapatma kuvveti olarak hareket eder. Ağırlık yeterli değilse, bir baskı kuvveti oluşturmak için genellikle çeşitli elastik elemanlar (çoğunlukla yaylar) kullanılır.
kinematik çift
iki katı bağlantının hareketli konjugasyonu, iletişim koşulları tarafından göreli hareketlerine kısıtlamalar getirir. Bağlantı koşullarının her biri bir serbestlik derecesini ortadan kaldırır ,
yani, uzayda 6 bağımsız göreli hareketten birinin olasılığı. Dikdörtgen bir koordinat sisteminde 3 öteleme hareketi (3 koordinat ekseni yönünde) ve 3 dönme hareketi (bu eksenler etrafında) mümkündür. İletişim koşullarının sayısına göre S K. p. 5 sınıfa ayrılır. Serbestlik derecesi sayısı K. p. W=6-S. Her sınıf içinde, K. öğeleri, bağlantıların kalan olası göreli hareketlerine göre türlere ayrılır. Bağlantıların temasının niteliğine göre, alt K. p. - yüzeyler boyunca temas ile ve daha yüksek olanlar - çizgiler boyunca veya noktalarda temas ile ayırt edilir. Tüm 5 sınıf ve birçok tür için daha yüksek K. eşyaları mümkündür; alt - sadece 3 sınıf ve 6 tür ( şek.1
). Geometrik olarak kapalı ve kapalı olmayan c.p arasında da bir ayrım yapılır. pilav. bir
) ve ikinci olarak, sözde kapatma için bir baskı kuvveti gereklidir. zorla kapatma (örneğin, bir kam mekanizmasında). Geleneksel olarak, birkaç ara yuvarlanma elemanına (örneğin, bilyalı ve makaralı rulmanlar) ve ara deforme olabilir elemanlara (örneğin, düz yaylı cihazların boşluksuz menteşeleri olarak adlandırılan) sahip hareketli kaplinler k olarak adlandırılır. pilav. 2
). N. Ya. Niberg.
Büyük sovyet ansiklopedisi. - M.: Sovyet Ansiklopedisi. 1969-1978 .
Diğer sözlüklerde "Kinematik çift" in ne olduğunu görün:
Mekanizmanın 2 bağlantısının bağıl hareketlerine izin verir. Bağlantıların yüzeye temas ettiği kinematik çift, alt çift olarak adlandırılır (örneğin, bir dönme menteşesi, bir öteleme kaydırıcısı ve bir kılavuz). Kinematik çift, ... ... Büyük Ansiklopedik Sözlük
kinematik çift- İki bitişik bağlantının, göreli hareketlerine izin veren çift Bağlantısı. [Önerilen terimlerin toplanması. Sayı 99. Mekanizmalar ve makineler teorisi. SSCB Bilimler Akademisi. Bilimsel ve Teknik Terminoloji Komitesi. 1984] Konu teorisi ... ... Teknik Çevirmenin El Kitabı- kinematinė pora durumları T sritis fizika atitikmenys: angl. kinematik çift vok. kinematisches Elementenpaar, n rusya. kinematik çift, f pranc. çift sinematik, f … Fizikos terminų žodynas
Birbirine bağlı iki bağlantının birbiriyle ilişkili olmasını sağlayan bağlantı. trafik. Bir linkin başka bir link ile temas edebileceği yüzeylere, çizgilere, noktalara denir. bağlantı elemanları. K. p. alt (temas yüzeyleri) ve daha yüksek olarak ayrılır ... ... Büyük ansiklopedik politeknik sözlük
kinematik çift- kinematik çift Mekanizmanın iki katı gövdesinin, verilen göreceli hareketlerine izin veren bağlantısı. Kodu IFToMM: 1.2.3 Bölüm: MEKANİZMALAR VE MAKİNELER TEORİSİNİN GENEL KAVRAMLARI ... Mekanizmalar ve makineler teorisi
çift- kinematik çift; çift İki bitişik bağlantının bağlantısı, onlardan göreli harekete izin verir. birkaç kuvvet; çift sistem iki paralel kuvvetler, mutlak değerde eşit ve zıt yönlere yönlendirilmiş ...
üst çift- Bağlantıların gerekli bağıl hareketinin ancak elemanlarına çizgiler boyunca ve noktalarda dokunularak elde edilebildiği bir kinematik çift ... Politeknik terminolojik açıklayıcı sözlük
Kinematik çiftin izin verdiği bağların bağıl hareketinin doğası, bağlantı noktalarındaki bağlantıların şekline bağlıdır.
İki bağlantının her birinde olası iletişim formları kümesi eleman kinematik çift. Kinematik bir çiftin bir elemanı olabilir nokta , astar , yüzey.
Elemanı olan kinematik çiftler nokta veya astar , arandı daha yüksek ; elemanı olan kinematik çiftler yüzey , aranan kalitesiz .
Temas eden bağlantılardan birinin (veya her ikisinin) geometrisine bağlı olarak, kinematik çiftler ayırt edilir: küresel, konik, silindirik, düzlemsel, sarmal.
Kinematik çiftin izin verdiği bağlantıların bağıl hareketinin doğasına göre, VP'nin dönme (B), öteleme (P), dönme öteleme (B + P) ve vidalı hareketi vardır. . B + P ve VP tipi çiftler arasındaki fark, ilkinde göreceli hareketlerin (dönme ve öteleme) bağımsız olması ve ikincisinde bir hareketin diğeri olmadan gerçekleştirilememesidir.
Pratikte, aynı yüzey, çizgi veya nokta boyunca temas halinde olan bağlantı çiftleri ile birlikte, çoklu temaslı çiftler kullanılmaktadır. Bu, ya etkileşim elemanlarının tekrarı (kamalı, çok yollu vida, dişli çiftleri) ya da yüzey ve hat boyunca (pimli küresel çift), silindirik ve düz yüzeyler (kayar anahtarlı çift) boyunca eşzamanlı temasın kullanılmasıdır. ). Bağlantılar arasındaki temasın tekrarı, farklı tipteki çiftlerin denkliğini karakterize eder. Üç nokta temaslı bir çift, bağlantıların hareketinin doğası açısından düzlemsel veya küresel bir alt çifte eşdeğer olabilir.
İçin sağlam vücut, uzayda serbestçe hareket ederken, serbestlik derecesi sayısı (birbirinden bağımsız mekanik sistemin olası hareketlerinin sayısı) altıdır: eksenler boyunca üç öteleme X, Y, Z ve bu eksenler etrafında üç dönüş (Şekil 2.1) ).
Bir kinematik çifte dahil olan bağlantılar için, temas koşulları (bağlar) bir bağlantının diğerine göre olası hareketlerinin sayısını azalttığından, serbestlik derecesi sayısı her zaman altıdan azdır: bir bağlantı diğerine nüfuz edemez ve hareket edemez. ondan uzak.
Genel durumda, her kinematik çift, bağlantıların bağıl hareketine S bağları yükler ve bağlantıların H=6 - S göreli hareketlerine izin verir. Üst üste binen S bağlarının sayısına bağlı olarak (kalan serbestlik dereceleri H), 5 sınıf kinematik çift ayırt edilir. Kinematik çiftlerin böyle bir sınıflandırması I.I. Artobolevsky tarafından önerildi (tablo 2.1)
Tablo 2.2-2.4, kinematik çiftlerin tasarım örneklerini göstermektedir. Tablo 2.2 ve 2.4'te gösterilen çiftler, bağlantılarda sürtünme ve deformasyon olmadığı varsayımına dayalı olarak sınıflandırılmıştır. Sürtünme, sürtünme dişlilerinde ayrı çiftlerin kullanılmasına izin verir. Deformasyon göz önüne alındığında, nokta temaslı çiftler yüzey temaslı çiftlere dönüştürülebilir.
Tablo 2.1
Kinematik çift türleri
Yayınlanan /
GİRİİŞ
1.Mekanizma teorisindeki temel kavramlar ve tanımlar
3. Kinematik zincirler
EDEBİYAT
GİRİİŞ
Kontrol çalışmasının teması, "Mekanizmalar ve makineler teorisi" disiplininde "mekanizmaların yapısal analizi" dir.
Çalışmanın amacı: mekanizmaların yapısal analizi hakkında bilgi oluşumu.
Çalışmanın amaçları: mekanizmaların oluşum ilkelerini ve sınıflandırma sistemlerini tanımak.
Konunun ana soruları:
Mekanizma teorisindeki temel kavramlar ve tanımlar;
Kinematik çiftler ve sınıflandırılması;
Kinematik zincirler;
Düz bir kinematik zincirin hareketlilik derecesi;
Mekanizmaların oluşumu ilkesi.
Mekanizma teorisindeki temel kavramlar ve tanımlar
Mekanizmalar ve makineler teorisi, mekanizmaların ve makinelerin yapısını, kinematiğini ve dinamiklerini inceler.
Bir mekanizma, bir veya daha fazla cismin hareketini diğer cisimlerin gerekli hareketlerine dönüştürmek için tasarlanmış yapay olarak oluşturulmuş bir cisimler sistemidir.
Mekanizmayı oluşturan katı cisimlere bağlantı denir.
Bir rijit hareketli gövde sistemi oluşturan her bir hareketli parça veya parça grubuna, mekanizmanın hareketli halkası denir.
Tüm sabit parçalar, sabit bağlantı veya raf adı verilen katı bir sabit gövde sistemi oluşturur.
Bu nedenle, herhangi bir mekanizmanın bir sabit ve bir veya daha fazla hareketli bağlantısı vardır.
Göreceli hareketlerine izin veren iki temas bağlantısının bağlantısına kinematik çift denir.
Kinematik bir çift oluşturan bir bağlantının başka bir bağlantıyla temas edebileceği yüzeyler, çizgiler, noktalar bağlantı elemanları olarak adlandırılır.
Birbirleriyle kinematik çiftler oluşturan bağlantılı bir bağlantı sistemine kinematik zincir denir.
Mekanizma - gerekli hareketi gerçekleştirmek için kullanılan bir kinematik zincir vardır.
Makineyi oluşturan mekanizmalar çeşitlidir. İşlevsel amaçları açısından, makine mekanizmaları aşağıdaki tiplere ayrılır:
a) motor ve dönüştürücü mekanizmaları:
motor mekanizmaları, çeşitli enerji türlerini mekanik işe dönüştürür;
dönüştürücü mekanizmalar, mekanik işin diğer enerji türlerine dönüşümünü gerçekleştirir;
b) Hareketi motordan teknolojik makineye veya yürütme organına aktaran aktarma mekanizmaları;
c) işlenmiş ortamı veya nesneyi doğrudan etkileyen aktüatörler;
d) teknolojik süreci, kontrolü vb. kontrol eden yönetim, kontrol ve düzenleme mekanizmaları;
e) Toplu parça ürünler üreten makinelerde kullanılan otomatik sayma, tartma ve paketleme mekanizmaları.
2. Kinematik çiftler ve sınıflandırılması
Bir çiftin ana özelliği, bağlı bağlantıların göreli konumunu belirlemek için kullanılabilecek geometrik parametrelerin sayısıdır. Örneğin, dönüş yüzeyine dokunurken, bağlantıların göreceli konumu, yalnızca bir parametre ayarlanarak tamamen belirlenir - bağlantıların dönme eksenine dik düzlemdeki göreceli dönüş açısı.
Küresel bir yüzeye dokunurken, zaten bu tür üç parametre vardır - bunlar, kürenin merkezinde kesişen karşılıklı olarak dik üç eksen etrafındaki dönüş açılarıdır.
Sonuç olarak, kinematik çiftin elemanları, her iki bağlantının noktalarının koordinatlarını belirli bir şekilde birbirine bağlayarak bağlantıların göreceli hareketine bazı kısıtlamalar getirir.
Bir kinematik çiftin elemanları tarafından, çifti oluşturan bağlantıların bağıl hareketine dayatılan kısıtlamalara kısıtlamalar, bu kısıtlamaları ifade eden kontrollere ise kısıtlama denklemleri denir.
Kinematik bir çiftin bağlantılarının göreli hareketine hangi bağların ve hangi miktarda yüklenebileceğini düşünelim.
Bilindiği gibi, genel durumda, uzayda serbestçe hareket eden herhangi bir kesinlikle katı cismin altı serbestlik derecesi vardır:
X, Y, Z eksenleri etrafında üç dönüş ve aynı eksenler boyunca üç öteleme hareketi.
Bir kinematik çiftin bağının bağıl hareketine uygulanan kısıtlamalar, bağlantıların serbest durumda sahip olduğu aynı olası bağıl hareketleri sınırlar.
Bu kısıtlamaların bir sonucu olarak, serbestçe hareket eden bir bağlantının altı olası göreli hareketinden bazıları ona bağlı hale gelir. Kalan bağımsız olası hareketler, kinematik çiftin bağlantılarının bağıl hareketlerindeki serbestlik derecelerinin sayısını belirler.
Kinematik çiftler, bağlantılarının göreli hareketine dayatılan bağlantı koşullarının sayısına bağlı olarak beş sınıfa ayrılır:
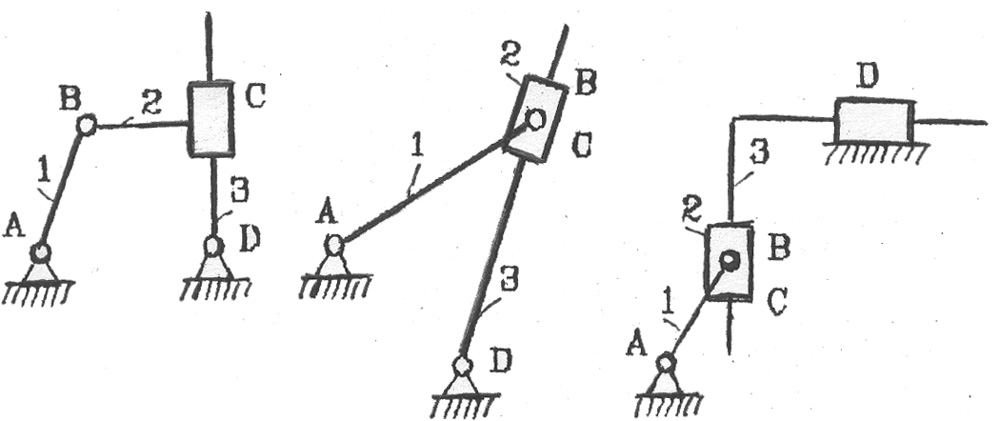
Bir çift sınıf I - (Şekil 1 a) beş hareketli bir çift, beşe eşit sayıda bağlantı serbestlik derecesine ve 1'e eşit sayıda bağlantı koşuluna sahiptir;
Bir çift sınıf II - (Şekil 1b) dört hareketli bir çift, kinematik çiftin bağlantısının serbestlik derecesi sayısı dört, bağlantı koşullarının sayısı 2'dir;
Bir çift sınıf III - (Şekil 1 c, i, d) üç hareketli bir çift, kinematik çiftin bağlantısının serbestlik derecesi sayısı üç, bağlantı koşullarının sayısı 3'tür;
Bir çift sınıf IV - (Şekil 1 e, i, f) iki hareketli bir çift, bağlantının serbestlik derecesi sayısı 2, bağlantı koşullarının sayısı 4'tür;
Bir sınıf V çifti (Şekil 1 g, h. i) tek hareketli (döner çift), bağlantının serbestlik derecesi sayısı bire eşittir, bağlantı koşullarının sayısı 5'tir.
Kinematik çiftler uzaysal ve düz olarak ayrılır. Uzamsal kinematik çiftler, bağıl hareketteki bağlantı noktaları uzaysal eğrileri tanımlayan çiftlerdir. Düzlemsel kinematik çiftlere, bağlantılarının noktaları göreli hareket halinde paralel düzlemlerde hareket eden bu tür çiftler denir, yani. yörüngeleri düzlem eğrilerdir. Modern makine mühendisliğinde, bağlantıları IV ve V sınıf çiftlerine dahil olan düz mekanizmalar özellikle yaygın olarak kullanılmaktadır.
Kinematik çiftler, bağlantıların temasının doğasında da farklılık gösterir. Bir kinematik çiftin elemanları, bağlantıların her bir göreceli pozisyonunda yüzeyde temas edecek şekilde ise, o zaman çifte en düşük denir. Dokunma ayrı noktalarda veya çizgiler boyunca gerçekleşirse, çift en yüksek olarak adlandırılır.
Alt çifti oluşturan bağlantıların bağıl hareketi ile bunların temas yüzeyleri birbiri üzerinde kayar. Bağlantılar daha yüksek bir çift oluşturursa, göreceli hareketleri hem çiftin elemanlarının kaymasıyla hem de onsuz - yuvarlanarak meydana gelebilir.
3. Kinematik zincirler
Kinematik zincirler, baklaların bağıl hareketinin doğasına göre düz ve uzaysal olarak ayrılır. Bir kinematik zincir, bağlantılarının noktaları paralel düzlemlerde uzanan yörüngeleri tanımlıyorsa düz olarak adlandırılır. Bir kinematik zincir, bağlantılarının noktaları düzlemsel olmayan yörüngeleri veya kesişen düzlemlerde uzanan yörüngeleri tanımlıyorsa uzaysal olarak adlandırılır.
Kinematik zincirlere dahil edilen bağlantıların türüne göre, ikincisi basit ve karmaşık olarak ayrılır.
Basit bir zincir, her bir bağlantının en fazla iki kinematik çifte dahil edildiği bir zincirdir (Şekil 2).
Karmaşık bir kinematik zincir, ikiden fazla kinematik çiftte en az bir bağlantının bulunduğu bir zincirdir (Şekil 3).
Şekil.2 Şekil.3
Bir kinematik zincir, her bir bağlantısı iki veya daha fazla kinematik çifte dahil olan kapalı zincir olarak adlandırılır.
Açık kinematik zincir, sadece bir kinematik çiftte bağlantıların bulunduğu bir kinematik zincirdir.
Eşit sayıda hareketli bakla ile kapalı zincirler açık zincirlere göre daha az serbestlik derecesine sahiptir. Kapalı devreler, çalışan makinelerin, takım tezgahlarının, otomatik makinelerin vb. kinematik devrelerinde, açık devrelerin - manipülatörlerin ve robotların devrelerinde yaygın olarak kullanılmaktadır.
Makinelerde, genellikle bağlantılardan birinin hareketsiz olduğu bu tür kinematik zincirler kullanılır, yani. bir duruştur. Örneğin, içten yanmalı bir motorun mekanizmasında, krank, biyel, piston ve silindir, motor çerçeveli silindirin sabit bir bağlantı (raf) olduğu bir kinematik zincir oluşturur (Şekil 4a, b).
Mekanizmanın kendisini harekete geçiren dış kuvvetlerden etkilenen halkasına ön bağlantı denir. Yararlı dirençlerin uygulandığı, üstesinden gelmek adına mekanizmanın inşa edildiği bağlantıya tahrikli bağlantı denir.
Şekil 4 a Şekil 4 b
Mekanizmanın kinematiğini incelerken, bağlantılardan birinin hareketinin verildiği kabul edilir. Giriş denir. Girişin hareketine bağlı olarak hareketini belirlemek istedikleri bağlantıya çıkış denir. Örneğimizde, kaydırıcı çıkış bağlantısı, krank ise giriş bağlantısıdır.
4. Düz bir kinematik zincirin hareketlilik derecesi
kinematik buhar zinciri düz mekanizma
Düzlem-paralel hareket sırasında her bir serbest cisim üç serbestlik derecesine sahiptir, bu nedenle K-bağlarını kinematik çiftlere bağlamadan önce hepsinin 3K serbestlik derecesi vardı.
Bağlantıları kinematik çiftlere bağlarken, ikincisi onlardan belirli sayıda serbestlik derecesi alır: düz mekanizmalardaki V. sınıfının çiftleri iki serbestlik derecesi (üçten) alır ve bir tane bırakır; sınıf IV çiftleri bir serbestlik derecesi alarak iki serbestlik bırakır.
Böylece, düz bir kinematik zincir aşağıdaki serbestliğe sahip olacaktır:
H = 3K - 2p1 - p2
Kinematik zincirin bir halkası sabitlenirse, serbestlik derecesi sayısı üç tane daha azalacak ve sabit bağlantıya göre şuna eşit olacaktır:
W = H - 3 veya W=3(k-1) - 2p1 - p2
K - 1 \u003d n (hareketli bağlantıların sayısı) ifade edilerek, sonunda şunu elde ederiz:
W = 3n - 2p1 - p2
n, kinematik zincirin hareketli bağlantılarının sayısıdır;
p1 - daha yüksek çiftlerin sayısı (bir bağlantı koşuluyla örtüşen);
p2, kinematik zincirdeki alt çiftlerin sayısıdır (her biri iki bağlantı koşulu gerektirir).
Böylece motorun kinematik zincirinde 3 hareketli halka, 3 çift dönüş ve 1 öteleme çifti olmak üzere toplam 4 alt çift bulunur. Yani onun için
W = 3 3 - 2 4 =1
Kinematik zincirin sabit bağlantı W'ye göre serbestlik derecesi sayısı, kinematik zincirin hareketlilik derecesi olarak adlandırılır.
Kinematik zincirin hareketlilik derecesini belirleme formülü ilk olarak 1869'da ünlü Rus bilim adamı P.L. Chebyshev tarafından elde edildi ve adını taşıyor. Bu formül sadece düzlemsel kinematik zincirler için uygundur.
Bu sayıların çeşitli kombinasyonları verildiğinde, çeşitli tiplerde gruplar elde edilebilir. Bu şekilde elde edilen tüm gruplar sınıflara ayrılabilir.
Düz mekanizmaların yapısal sınıflandırmasını düşünün.
Koşullu olarak, bir sınıf I mekanizması olan bir sınıf V kinematik çifti oluşturan ana bağlantıyı ve rafı arayalım (Şekil 5).
Herhangi bir düzlemsel mekanizmanın oluşumu, W = 0 koşulunu sağlayan bağlantı gruplarının ilk mekanizmaya sıralı bir şekilde eklenmesi olarak temsil edilebilir.
lider bağlantı lider bağlantı
Şekil 5
Örneğin, ilk grup (Şekil 6.a) bir sınıf I mekanizmasına (ön bağlantı ve raf), bir sonraki grup ya birinci grubun bağlantılarına ya da kısmen birinci grubun bağlantılarına bağlıdır. ve önde gelen bağlantıya veya rafa vb.
Birkaç grubun bir sınıf I mekanizmaya bağlanmasıyla oluşan mekanizmalar, mekanizmanın kendisi gibi, bire eşit bir hareketlilik derecesine sahiptir, çünkü gruplar bağlı oldukları mekanizmanın hareketlilik derecesini değiştirmezler.
Mekanizmalar, grupların aynı anda birkaç sınıf I mekanizmaya katılmasıyla da oluşturulabilir (Şekil 6.b). Bu durumlarda, elde edilen mekanizmaların hareketlilik derecesi, bu tür grupların bağlı olduğu sınıf I mekanizmaların sayısına eşit olacaktır, yani. ortaya çıkan mekanizmanın önde gelen bağlantılarının sayısı.
a) 2 - önde gelen bağlantı b) 2 ve 5 - önde gelen bağlantılar
Pirinç. 6
İki bağlantı ve üç çift sınıf V içeren bir bağlantı grubuna (Şekil 7) ikinci dereceden sınıf II grubu veya iki uçlu Assur grubu denir. (Bu grup ana mekanizmaya iki tasma BC ve CD ile bağlanır).
Grubun sırası, grubun ana mekanizmaya bağlı olduğu eleman sayısına göre belirlenir.
İkinciden daha yüksek olmayan sınıf gruplarını içeren mekanizmalara sınıf II mekanizmalar denir.
Şekil 7
Sonraki tüm grup II sınıfı türleri, bireysel dönme çiftlerinin öteleme çiftleriyle değiştirilmesiyle elde edilebilir.
İkinci tip, aşırı dönme çiftlerinden birinin bir öteleme çifti ile değiştirildiği tiptir (Şekil 8).
Pirinç. sekiz
Üçüncü tip - öteleme çifti, orta dönme çifti ile değiştirilir (Şekil 9).
Dördüncü görünüm - iki aşırı dönme çifti, iki öteleme çifti ile değiştirilir (Şekil 10).
Şekil 10
Beşinci tip - öteleme çiftleri, aşırı ve orta dönme çiftleri ile değiştirilir (Şekil 11).
Şekil 11
Böylece, dönme, öteleme ve daha yüksek sınıf IV ve V çiftleri olan düz mekanizmalarda, beş sınıf II grubu vardır. Teknolojide kullanılan modern mekanizmaların çoğu, sınıf II mekanizmalara aittir.
Şimdi bağlantıların ve kinematik çiftlerin sayısının ikinci olası kombinasyonunu ele alalım. Bağlantı sayısı açısından bir sonraki grup, dört bağlantı ve altı çift V sınıfı içermelidir (Şekil 12). Bu kombinasyon için, oluşum ilkeleri farklı olan üç tip kinematik zincir elde edilebilir.
Birinci kinematik zincir daha karmaşık bir açık kinematik zincirdir ve üçüncü dereceden bir sınıf III grubudur ve üç uçlu grup olarak adlandırılır.
Şekil 12
EFC bağlantısı temel bağlantıdır.
Üçüncü dereceden sınıf III gruplarından daha yüksek olmayan grupları içeren mekanizmalara sınıf III mekanizmalar denir (Şekil 13).
Şekil 13
İkinci kinematik zincir, ana mekanizmanın "k" ve "m" bağlantılarına tasma elemanları tarafından değil, temel bağlantılara ait serbest B ve G elemanları ile bağlanan kapalı bir kinematik zincirdir (Şekil 14). ).
Şekil 14
Bu grup, iki rijit kapalı döngü oluşturan iki temel ünite BCD ve EGF'ye ek olarak, bir adet hareketli dört taraflı kapalı döngü CEFD'ye sahiptir (Şekil 15).
Hareketli dört taraflı kapalı devreleri içeren gruplar, sınıf IV grupları olarak sınıflandırılır.
Üçüncü tip kinematik zincir: bu zincir, iki basit sınıf II - BCD ve EFG grubuna ayrılır ve bu nedenle daha önce düşünülenlere aittir ve temelde yeni bir şeyi temsil etmez (Şekil 16).
 Pirinç. 1.15 Şekil 1.16
Pirinç. 1.15 Şekil 1.16
Bu nedenle, sınıf II grup tek taraflı bir devre içerir, sınıf III grup üç taraflı bir kapalı devre içerir ve sınıf IV grup kapalı dört taraflı bir devre içerir. Tüm dikkate alınan gruplar, konturların yapısındaki karşılık gelen değişikliklerle elde edilir.
EDEBİYAT
Artobolevski I.I. Mekanizmalar ve makineler teorisi. M, 1975, s. 48-90.
Dikiş makinesi çalışması. İğne ve iplik alma mekanizmalarının çalışma noktalarının kinematik şemasının ve yörüngelerinin oluşturulması. İğne ve iplik alma mekanizmalarının bağlantılarının hız ve ivmelerinin belirlenmesi, bir ivme planının oluşturulması. Mekanizmaların kuvvet analizi.
Yapısal Analiz, mekanizmanın pozisyonlarının yapımı ve çalışma için hız planları ve boşta hareket, üst ve alt uç pozisyonlar. Hızlanma planlarının yapımı, mekanizmanın kinetostatik hesabı. Atalet kuvvetlerinin ve bağlantıların yerçekimi kuvvetlerinin belirlenmesi.
Mekanizmanın yapısal ve kinematik çalışması: şemanın tanımı; hız planlarının yapımı. Kinematik çiftlerde reaksiyonların belirlenmesi; N.E. tarafından önde gelen bağlantının kuvvet hesaplaması Zhukovski. Dişli ve kam mekanizmasının sentezi.
Kol mekanizmasının boyutlarının ve parametrelerinin hesaplanması. Azaltılmış atalet momentleri, azaltılmış kuvvet momentleri, iş itici güçler ve direniş kuvvetleri, değişiklikler kinetik enerji. Yaklaşma aşamasında hareket yasasının özellikleri.
Krank-kaydırıcı mekanizmasının yapısal analizi, yapısal bileşiminin tanımlanması. Kinematik şemanın sentezi. Kinematik Analiz düz mekanizma. Mekanizmanın bağlantılarına etki eden kuvvetlerin belirlenmesi. Kinetostatik kuvvet analizi yöntemi.
Makineler, mekanizmalar, bağlantılar ve kinematik çiftlerin temel kavramları ve tanımları. Asur grupları. Düz ve uzamsal mekanizmaların serbestlik derecesi sayısının hesaplanması, düz kaldıraç mekanizmalarının yapısının analizi. Pasif bağlantılar ve aşırı hareketlilik.
Krank dengeleyici mekanizmasının mekanizmasının kinematik diyagramı. Önde gelen bağlantının ilk konumu. Kinematik diyagramlar, hız ve ivme planları. Tahrik krankındaki dengeleme momentinin belirlenmesi, Zhukovsky kol yöntemi ile doğrulama.
Planya makinesinin cihazı, çalışma prensibi ve amacı. Kinematik analiz ve elektrik motoru seçimi. Dengeleme kuvvetinin uygulama noktası ve yönünün belirlenmesi. Kinetik enerji ve gerçek hız değişim diyagramının oluşturulması.
Boyutsal zincirin bileşen bağlantıları için toleransların hesaplanması, görev tarafından belirlenen sınırlar dahilinde TsD2-35-VM dişli kutusunun verilen kapatma bağlantısının değerini sağlar. Yöntemlerle hesaplamalar yapmak: maksimum-minimum, olasılık ve düzenleme.
Menteşeli mekanizmanın kinematik şeması. Sahne uzunluğunun ve uzunluğun ölçek faktörünün belirlenmesi. Serif yöntemi kullanılarak belirli bir krank konumu için bir mekanizma konum planının oluşturulması. Bir hız planı oluşturma. Sahne arkasının açısal ivmesinin hesaplanması.
Makineler ve mekanizmalar hakkında temel bilgiler. Makinelerin enerji ve çalışma grupları. Mekanik şanzıman, tahrikli ve tahrikli mil kavramları. Kayış ve dişli iletiminin dişli oranı. Düz kuvvetler sistemi. Burulma sırasında gerilmelerin dağılımı.
Düz bir kaldıraç mekanizmasının yapısal, dinamik ve kinetostatik analizi. Bağlantılarının açısal hızlarının belirlenmesi; dış kuvvetler ve her bir bağlantıya ve kinematik çifte etki eden atalet momentleri. Mukavemet mekanizmasının tasarım hesabı.
Bir kinematik çift, onlara belirli bir göreli hareket sağlayan iki bitişik bağlantının hareketli bir bağlantısıdır. Kinematik bir çiftin öğeleri, iki bağlantının hareketli bir bağlantısının meydana geldiği ve bir kinematik Çift oluşturan bir dizi çizgi veya nokta yüzeyidir. Bir çiftin var olması için, onu oluşturan bağların elemanları sürekli T temasında olmalıdır.
Çalışmaları sosyal ağlarda paylaşın
Bu çalışma size uymuyorsa sayfanın alt kısmında benzer çalışmaların listesi bulunmaktadır. Arama butonunu da kullanabilirsiniz
2. ders
Makinenin mekanizması ne olursa olsun, her zaman sadece bağlantılardan ve kinematik çiftlerden oluşur.
Hareketli bağlantılar üzerindeki mekanizmalarda uygulanan bağlantı koşulları, makineler ve mekanizmalar teorisinde Kinematik çiftleri çağırmak gelenekseldir.
kinematik çiftiki bitişik bağlantının hareketli bağlantısı olarak adlandırılır ve onlara belirli bir göreli hareket sağlar.
Masada. 2.1, pratikte en yaygın kinematik çiftlerin isimlerini, çizimlerini, sembollerini ve bunların sınıflandırılmasını gösterir.
Bağlantılar, kinematik bir çift halinde birleştirildiğinde yüzeyler, çizgiler ve noktalar boyunca birbirleriyle temas edebilir.
Kinematik bir çiftin elemanlarıiki bağlantının hareketli bir bağlantısının meydana geldiği ve bir kinematik Çift oluşturan bir dizi Yüzeyler, çizgiler veya noktalar olarak adlandırırlar. Kinematik çiftlerin elemanlarının temas tipine bağlı olarak, daha yüksek ve daha düşük kinematik çiftler.
Elemanların bir çizgi veya nokta şeklinde oluşturduğu kinematik çiftlere denir. daha yüksek .
Elementlerin yüzey şeklinde oluşturduğu kinematik çiftlere denir. daha düşük.
Bir çiftin var olması için, onu oluşturan bağların elemanları sürekli temas halinde olmalıdır, yani. kapalı olmak. Kinematik çiftlerin kapanması şu şekilde olabilir:geometrik olarak veya zorla, Örneğin kendi kütlesi yardımıyla yaylar vs..
Kinematik çiftlerin mukavemeti, aşınma direnci ve dayanıklılığı, tiplerine ve tasarımlarına bağlıdır. Alt çiftler, yüksek olanlardan daha fazla aşınmaya dayanıklıdır. Bu, daha düşük çiftlerde, çiftlerin elemanlarının temasının yüzey boyunca meydana gelmesi ve bu nedenle aynı yükle, yüksek olandan daha düşük özgül basınçların ortaya çıkmasıyla açıklanır. Aşınma, ceteris paribus, özgül basınçla orantılıdır ve bu nedenle düşük Çiftler, yüksek olanlardan daha yavaş aşınır. Bu nedenle, makinelerdeki aşınmayı azaltmak için daha düşük çiftlerin kullanılması tercih edilir, ancak genellikle daha yüksek kinematik çiftlerin kullanılması, boyutları küçülten ve tasarımı basitleştiren makinelerin yapısal diyagramlarını önemli ölçüde basitleştirmeyi mümkün kılar. Bu nedenle, kinematik çiftlerin doğru seçimi karmaşık bir mühendislik problemidir.
Kinematik Çiftler ayrıca şu şekilde bölünür:serbestlik derecesi sayısı(hareketlilik), kendisi aracılığıyla bağlanan bağlantıların kullanımına sunduğu veyabağlantı koşullarının sayısı(çift sınıf), çift tarafından bağlı bağlantıların göreli hareketine dayatılır. Böyle bir sınıflandırmayı kullanırken, makine geliştiricileri, bağlantıların olası göreli hareketleri ve bir çiftin elemanları arasındaki kuvvet faktörlerinin etkileşiminin doğası hakkında bilgi alırlar.
Genel durumda olan ücretsiz bir bağlantı M - boyutlu uzay, izin veren P en basit hareket türleri, bir dizi serbestlik derecesine sahiptir! ( H) veya W - hareketli.
Bu nedenle, eğer bağlantı üç boyutlu uzaydaysa, altı tip basit harekete izin verir - eksenler etrafında ve boyunca üç dönme ve üç öteleme X, V, Z , o zaman altı serbestlik derecesine sahip olduğunu veya altı genelleştirilmiş koordinatı olduğunu veya altı hareketli olduğunu söyleriz. Bağlantı, üç tür basit harekete izin veren iki boyutlu bir alandaysa - bir dönüş Z ve eksenler boyunca iki öteleme X ve Y , sonra üç serbestlik derecesi veya üç genelleştirilmiş koordinatı olduğunu veya üç hareketli olduğunu söylüyorlar.
Tablo 2.1
Bağlantılar kinematik çiftler kullanılarak birleştirildiğinde, serbestlik derecelerini kaybederler. Bu, kinematik çiftlerin bağlandıkları bağlantılara bir sayı ile dayattığı anlamına gelir. S.
Kinematik bir çiftte birleştirilen bağların bağıl harekette sahip olduğu serbestlik derecelerinin sayısına bağlı olarak, çiftin hareketliliğini belirleyin ( G = H ). H, bağıl hareket halindeki kinematik çiftin bağlantılarının serbestlik derecesi sayısı ise, ile çift hareketliliği şu şekilde belirlenir:
nerede P - incelenen çiftin bulunduğu alanın hareketliliği; S - çift tarafından empoze edilen tahvil sayısı.
Unutulmamalıdır ki bir çiftin hareketliliği W (2.1) ile tanımlanan , uygulandığı alanın tipine değil, sadece yapıya bağlıdır.
Örneğin, hem altı hem de üç hareketli alanda bir dönme (çeviri) (bkz. Tablo 2.1) çifti hala tek hareketli kalacaktır, ilk durumda üzerine 5 bağ uygulanacaktır ve ikinci durumda - 2 bağ ve sırasıyla sahip olacağız:
altı hareketli alan için:
üç hareketli alan için:
Gördüğünüz gibi, kinematik çiftlerin hareketliliği, bu sınıflandırmanın bir avantajı olan uzayın özelliklerine bağlı değildir. Aksine, kinematik çiftlerin sık sık sınıflara bölünmesi, çiftin sınıfının uzayın özelliklerine bağlı olması gerçeğinden muzdariptir, bu da farklı uzaylardaki aynı çiftin farklı bir sınıfa sahip olduğu anlamına gelir. Bu, pratik amaçlar için elverişsizdir, bu, kinematik çiftlerin böyle bir sınıflandırmasının irrasyonel olduğu anlamına gelir, bu nedenle kullanmamak daha iyidir.
Bir çiftin elemanlarının böyle bir formunu seçmek mümkündür, böylece bir bağımsız temel hareketle ikincisi ortaya çıkar - bağımlı (türev). Böyle bir kinematik çiftin bir örneği bir vidadır (Tablo 2. 1) . Bu çiftte, vidanın (somun) dönme hareketi eksen boyunca öteleme hareketine neden olur. Böyle bir çift, tek hareket eden bir çifte atfedilmelidir, çünkü içinde yalnızca bir bağımsız en basit Hareket gerçekleştirilir.
Kinematik bağlantılar.
Tabloda verilen kinematik çiftler. 2.1, basit ve kompakt. Mekanizmalar oluşturmak için gerekli olan neredeyse tüm en basit göreli bağlantı hareketlerini uygularlar. Ancak, makineler ve mekanizmalar oluştururken nadiren kullanılırlar. Bunun nedeni, genellikle bir çift oluşturan bağlantıların temas noktalarında büyük sürtünme kuvvetlerinin ortaya çıkmasıdır. Bu, çiftin elemanlarının önemli ölçüde aşınmasına ve dolayısıyla tahribatına yol açar. Bu nedenle, bir kinematik çiftin en basit iki-bağlantılı kinematik zincirinin yerini genellikle daha uzun kinematik zincirler alır, bunlar birlikte değiştirilmekte olan kinematik çiftle aynı bağıl hareket bağlantılarını uygular.
Kinematik bir çiftin yerini almak üzere tasarlanmış bir kinematik zincire kinematik bağlantı denir..
Pratikte en yaygın olan dönme, öteleme, sarmal, küresel ve düzlemden düzleme kinematik çiftleri için kinematik zincirlere örnekler verelim.
Tablodan. 2.1 Dönme kinematik çiftinin en basit analogunun yuvarlanma elemanlarına sahip bir yatak olduğu görülebilir. Benzer şekilde, makara kılavuzları doğrusal çiftin yerini alır ve bu böyle devam eder.
Kinematik bağlantılar operasyonda daha uygun ve güvenilirdir, çok daha büyük kuvvetlere (momentlere) dayanır ve mekanizmaların bağlantıların yüksek göreli hızlarında çalışmasına izin verir.
Ana mekanizma türleri.
Mekanizma olarak görülebilir özel durum en az bir bağlantının bir rafa dönüştürüldüğü ve kalan bağlantıların hareketinin giriş bağlantılarının belirtilen hareketi tarafından belirlendiği bir kinematik zincir.
Mekanizmayı temsil eden kinematik zincirin ayırt edici özellikleri, bağlantılarının rafa göre hareketinin hareketliliği ve kesinliğidir.
Bir mekanizmanın birden fazla girdisi ve bir çıktı bağlantısı olabilir, bu durumda buna toplama mekanizması denir ve tersine bir girdi ve birkaç çıktı bağlantısı, o zaman farklılaştırma mekanizması olarak adlandırılır.
Mekanizmalar ikiye ayrılırkılavuzlar ve iletim.
iletim mekanizmasıgiriş ve çıkış bağlantılarının hareketleri arasındaki belirli bir işlevsel ilişkiyi yeniden oluşturmak için tasarlanmış bir cihaz olarak adlandırılır.
kılavuz mekanizmaSadece hareketli bağlantılarla kinematik çiftler oluşturan bir bağlantının belirli bir noktasının yörüngesinin belirli bir eğri ile çakıştığı bir mekanizma olarak adlandırırlar.
Teknolojide geniş uygulama alanı bulan ana mekanizma türlerini düşünün.
Bağlantıları yalnızca alt kinematik çiftleri oluşturan mekanizmalara denir.mafsallı kol. Bu mekanizmalar, dayanıklı, güvenilir ve kullanımı kolay olmaları nedeniyle yaygın olarak kullanılmaktadır. Bu tür Mekanizmaların ana temsilcisi eklemli dört halkadır (Şekil 2.1).
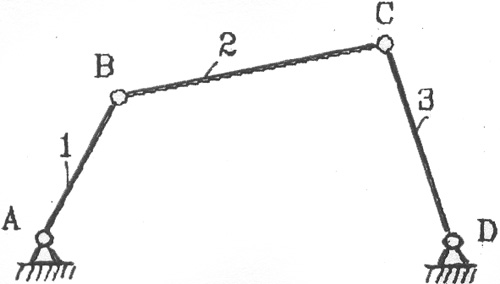
Mekanizmaların adları genellikle giriş ve çıkış bağlantılarının adlarıyla veya bileşimlerinde yer alan karakteristik bağlantıyla belirlenir.
Giriş ve çıkış bağlantılarının hareket yasalarına bağlı olarak, bu mekanizma krank-rocker, çift krank, çift rocker, rocker-krank olarak adlandırılabilir.
Mafsallı dört bağlantı, takım tezgahı yapımında, alet yapımında ve ayrıca tarım, gıda, kar temizleme makinesi ve diğer makinelerde kullanılır.

Örneğin, menteşeli bir dört bağlantıda bir dönme çiftini değiştirirsek D , öteleme için, o zaman iyi bilinen krank kaydırma mekanizmasını elde ederiz (Şekil 2.2).
Pirinç. 2.2. Çeşitli krank kaydırıcı mekanizmaları:
1 krank 2 - biyel; 3 - kaydırıcı
Krank-kaydırıcı (kaydırıcı-krank) mekanizması kompresörlerde, pompalarda, motorlarda yaygın olarak kullanılmaktadır. içten yanma ve diğer makineler.
Menteşeli dört bağlantıda bir dönme çiftinin değiştirilmesiİTİBAREN öteleme için bir rocker mekanizması elde ederiz (Şekil 2.3).
p ve c'de .2.3, külbütör mekanizmasında, içindeki dönme çiftlerinin değiştirilmesiyle menteşeli bir dört bağlantıdan elde edilir. Yapabilir ilerici için.
Rocker mekanizmaları, çalışma ve rölantideki asimetrinin doğal özelliklerinden dolayı planya makinelerinde geniş uygulama alanı bulmuştur. Genellikle uzun bir çalışma strokuna ve kesicinin orijinal konumuna geri dönmesini sağlayan hızlı bir rölanti strokuna sahiptirler.
Pirinç. 2.3. Çeşitli rocker mekanizmaları:
1 krank; 2 taş; 3 kanat.
Menteşe-kol mekanizmaları robotikte büyük kullanım alanı bulmuştur (Şekil 2.4).
Bu mekanizmaların özelliği, sahip oldukları Büyük bir sayı serbestlik dereceleri, bu da birçok sürücüye sahip oldukları anlamına gelir. Giriş bağlantılarının tahriklerinin koordineli çalışması, tutucunun rasyonel bir yörünge boyunca ve çevreleyen alanda belirli bir yere hareket etmesini sağlar.
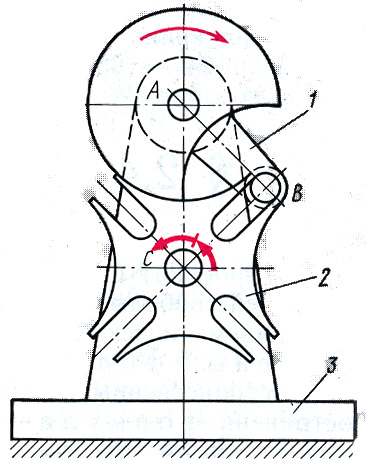
Mühendislikte yaygın uygulamakam mekanizmaları. Kam mekanizmalarının yardımıyla, belirli bir yasaya göre tahrikli bağlantının hemen hemen her hareketini elde etmenin yapısal olarak en kolay yoludur,
şu anda var Büyük sayı bazıları Şekil 2'de gösterilen kam mekanizmaları çeşitleri. 2.5.

Kam mekanizmasının çıkış bağlantısının gerekli hareket yasası, giriş bağlantısına (kam) uygun bir şekil verilerek elde edilir. Kam dönme gerçekleştirebilir (Şekil 2.5, bir, b ), öteleme (Şekil 2.5, c, g ) veya karmaşık hareket. Çıkış bağlantısı, eğer bir öteleme hareketi yapıyorsa (Şekil 2.5, bir, içinde ), itici olarak adlandırılır ve sallanırsa (Şekil 2.5, G ) - rockçı. Daha yüksek kinematik çiftte sürtünme kayıplarını azaltmak için AT ek bir bağlantı silindiri kullanın (Şekil 2.5, G ).
Kam mekanizmaları hem çalışan makinelerde hem de çeşitli kumanda cihazlarında kullanılmaktadır.
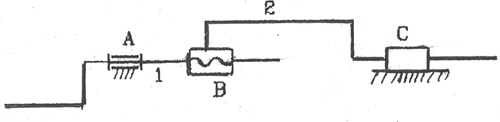
Çok sık olarak, metal kesme makinelerinde, preslerde, çeşitli aletlerde ve ölçüm cihazlarında, en basiti Şekil 1'de gösterilen vida mekanizmaları kullanılır. 2.6:
Pirinç. 2.6 Vida mekanizması:
1 - vida; 2 - somun; A, B, C - kinematik çiftler
Vidalı mekanizmalar genellikle dönme hareketini birbirine bağlı öteleme hareketine dönüştürmenin gerekli olduğu veya bunun tersinin gerekli olduğu durumlarda kullanılır. Hareketlerin birbirine bağımlılığı, vida çiftinin geometrik parametrelerinin doğru seçilmesiyle sağlanır. AT .
kama mekanizmalar (Şekil 2.7) kullanılır farklı tür Sınırlı giriş kuvvetleriyle büyük bir çıkış kuvveti oluşturmanın gerekli olduğu kenetleme cihazları ve fikstürleri. Bu mekanizmaların ayırt edici bir özelliği, tasarımın sadeliği ve güvenilirliğidir.
Sürtünme kuvvetleri nedeniyle temas eden cisimler arasında hareket aktarımının gerçekleştirildiği mekanizmalara sürtünme denir. En basit üç bağlantılı sürtünme mekanizmaları, Şek. 2.8

Pirinç. 2.7 Kama mekanizması:
1, 2 - bağlantılar; L, V, C - kinematik bayramlar.

Pirinç. 2.8 Sürtünme mekanizmaları:
a - paralel eksenli sürtünme mekanizması; b - kesişen eksenlere sahip sürtünme mekanizması; içinde - kremayer ve pinyon sürtünme mekanizması; 1 - giriş silindiri (tekerlek);
2 çıkış silindiri (tekerlek); 2" - ray
Linklerin olması nedeniyle 1 ve 2 birbirine bağlı, aralarındaki temas hattı boyunca, sürülen bağlantıyı kendisiyle birlikte sürükleyen bir sürtünme kuvveti ortaya çıkar. 2 .
Sürtünme dişlileri, cihazlarda, bant sürücülerinde, varyatörlerde (yumuşak hız kontrollü mekanizmalar) yaygın olarak kullanılmaktadır.
İletim için döner hareket Belirli bir yasaya göre, paralel, kesişen ve kesişen eksenli miller arasında çeşitli tipte dişliler kullanılır. mekanizmalar . Dişliler yardımı ile hem miller arası hareket aktarımı yapılabilmektedir.sabit akslar, Böylece uzayda hareket etmek.
Dişli mekanizmalar, çıkış bağlantısının dönme sıklığını ve yönünü, hareketlerin toplamını veya ayrılmasını değiştirmek için kullanılır.

Şek. 2.9, sabit dingilli dişlilerin ana temsilcilerini gösterir.
Şekil 2.9. Sabit akslı dişli tahrikler:
a - silindirik; b - konik; Sonunda; g - raf;
1 - dişli; 2 - dişli; 2 * ray
Birbirine geçen iki dişliden daha küçüğüne denir. dişli ve daha fazlası - dişli çark.
Raf, eğrilik yarıçapının sonsuza eşit olduğu bir dişli çarkın özel bir durumudur.

Dişli takımının hareketli aksları olan dişlileri varsa, bunlara gezegen denir (Şekil 2.10):
Bununla birlikte, planet dişliler, sabit dingilli dişlilere kıyasla, daha az sayıda dişli ile daha fazla güç ve dişli oranlarının aktarılmasına izin verir. Ayrıca toplama ve diferansiyel mekanizmaların oluşturulmasında da yaygın olarak kullanılırlar.
Kesişen eksenler arasındaki hareketlerin iletimi, bir sonsuz dişli kullanılarak gerçekleştirilir (Şekil 2.11).

Somun uzunlamasına kesilerek ve karşılıklı olarak dik düzlemlerde iki kez katlanarak bir vida-somun transmisyonundan bir sonsuz dişli elde edilir. Sonsuz dişli kendi kendini frenleme özelliğine sahiptir ve büyük dişli oranlarını tek aşamada uygulamanıza olanak tanır.
Pirinç. 2.11. Sonsuz dişli:
1 - solucan, 2 - sonsuz tekerlek.
Aralıklı hareket dişli mekanizmaları ayrıca Malta çapraz mekanizmasını da içerir. Şek. З-Л "2. dört bıçaklı "Malta haçı" mekanizmasını gösterir.
"Malta haçı" mekanizması, önde gelen çiftin sürekli dönüşünü dönüştürür - bir fenerle krank 1 3 "çapraz" ın aralıklı dönüşüne 2 , fener 3 darbe olmadan "çapraz" radyal oluğuna girer 2 ve onu köşeye çevirir z oluk sayısıdır.
Hareketi sadece bir yönde gerçekleştirmek için cırcır mekanizmaları kullanılır. Şekil 2.13, bir külbütör kolu 1, bir cırcır çarkı 3 ve mandallar 3 ve 4'ten oluşan bir cırcır mekanizmasını göstermektedir.

Rocker'ı sallarken 1 sallanan köpek 3 cırcır tekerleğe dönüş sağlar 2 sadece külbütör saat yönünün tersine hareket ettirirken. Tekerleği tutmak için 2 külbütör zamana karşı hareket ettiğinde kendiliğinden saat yönünde dönüşten, bir kilitleme mandalı kullanılır 4 .
Maltese ve cırcır mekanizmaları, takım tezgahlarında ve aletlerde yaygın olarak kullanılmaktadır,
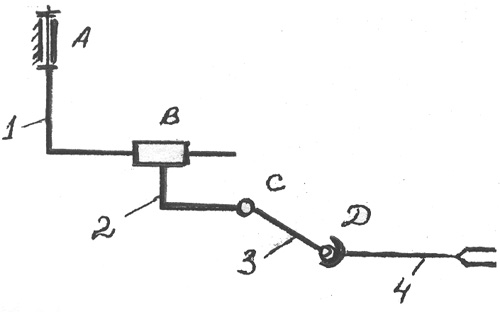
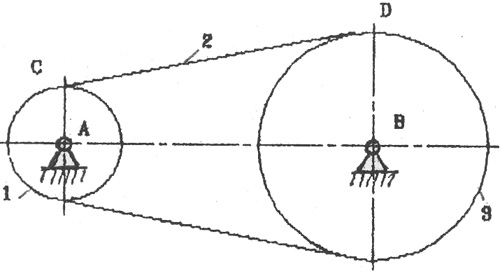
Göreceli olarak transfer etmek gerekirse uzun mesafe mekanik enerji uzayda bir noktadan diğerine, daha sonra esnek bağlantılara sahip mekanizmalar kullanılır.
Kayışlar, halatlar, zincirler, ipler, kurdeleler, toplar vb. Hareketi bir mekanizmadan diğerine ileten esnek bağlantılar olarak kullanılır,
Şek. 2.14, esnek bir bağlantıya sahip en basit mekanizmanın bir blok şemasını göstermektedir.
Esnek bağlantılara sahip dişliler, makine mühendisliği, alet yapımı ve diğer endüstrilerde yaygın olarak kullanılmaktadır.
En tipik basit mekanizmalar yukarıda ele alınmıştır. mekanizmalar ayrıca özel Literatür, sertifikalar ve referans kitaplarında da verilmektedir, örneğin.
Mekanizmaların yapısal formülleri.
Çeşitli mekanizmaların yapısında (yapısında) serbestlik derecesi sayısını ilişkilendiren genel kalıplar vardır. W bağlantı sayısı ve kinematik çiftlerinin sayısı ve türü ile mekanizma. Bu kalıplara mekanizmaların yapısal formülleri denir.
Mekansal mekanizmalar için, Malyshev'in formülü şu anda en yaygın olanıdır ve türevi aşağıdaki gibidir.
İle bir mekanizmaya izin verin m bağlantılar (raf dahil), - bir, iki, üç, dört ve beş hareketli çift sayısı. Hareketli bağlantıların sayısını gösterelim. Tüm hareketli bağlantılar olsaydı özgür bedenler, toplam sayısı serbestlik derecesi 6 olur n . Ancak, her bir tek hareketli çift V sınıfı, bir çift oluşturan bağlantıların nispi hareketini, her biri iki hareketli çift olmak üzere 5 bağ uygular. IV sınıf - 4 bağ vb. Bu nedenle, altıya eşit olan toplam serbestlik derecesi sayısı, miktar kadar azalacaktır.
bir kinematik çiftin hareketliliği nerede, hareketliliği eşit olan çiftlerin sayısıdır. i . Üst üste binen bağlantıların toplam sayısı belirli bir sayıyı içerebilir. q mekanizmanın hareketliliğini azaltmadan diğer bağlantıları çoğaltan, ancak onu yalnızca statik olarak belirsiz bir sisteme dönüştüren yedekli (tekrarlanan) bağlantılar. Bu nedenle, uzamsal mekanizmanın serbestlik derecesi sayısı, rafa göre hareketli kinematik zincirinin serbestlik derecesi sayısına eşit, aşağıdaki Malyshev formülü ile belirlenir:
veya kısaca
(2.2)
mekanizma için statik olarak belirli sistem, için - statik olarak belirsiz sistem.
Genel durumda, denklem (2.2)'nin çözümü zor bir problemdir, çünkü bilinmeyen W ve q ; mevcut çözümler karmaşıktır ve bu derste ele alınmamıştır. Ancak, belirli bir durumda, eğer W , geometrik düşüncelerden bulunan mekanizmanın genelleştirilmiş koordinatlarının sayısına eşit, bu formülden gereksiz bağlantıların sayısını bulabilirsiniz (bkz. Reshetov L. N. Rasyonel mekanizmaların tasarlanması. M., 1972)
(2.3)
ve mekanizmanın statik belirlenebilirliği problemini çözmek; veya mekanizmanın statik olarak belirlendiğini bilerek, bulun (veya kontrol edin) W.
Yapısal formüllerin bağlantı boyutlarını içermediğine dikkat etmek önemlidir, bu nedenle mekanizmaların yapısal analizinde bunların herhangi biri olduğu varsayılabilir (belirli sınırlar içinde). Yedek bağlantı () yoksa, mekanizmanın montajı bağlantıların deformasyonu olmadan gerçekleşir, ikincisi kendi kendini ayarlıyor gibi görünmektedir; bu nedenle, bu tür mekanizmalara kendi kendine hizalama denir. Fazla bağlantılar () varsa, mekanizmanın montajı ve bağlantılarının hareketi ancak ikincisi deforme olduğunda mümkün olur.
Yedek bağlantıları olmayan düz mekanizmalar için yapısal formül 1869'da dönme çiftleri ve bir serbestlik dereceli kaldıraç mekanizmaları için ilk kez öneren P. L. Chebyshev'in adını taşıyor. Şu anda, Chebyshev formülü herhangi bir düz mekanizmaya genişletildi ve aşağıdaki gibi aşırı kısıtlamalar dikkate alınarak türetildi.
m bağlantılı düz bir mekanizmaya izin verin (raf dahil), - hareketli bağlantıların sayısı, - alt çiftlerin sayısı ve - daha yüksek çiftlerin sayısı. Tüm hareketli bağlantılar düzlemsel hareket yapan serbest cisimler olsaydı, toplam serbestlik derecesi sayısı 3'e eşit olurdu. n . Bununla birlikte, her bir alt çift, çifti oluşturan bağlantıların nispi hareketi üzerine bir serbestlik derecesi bırakarak iki bağ dayatır ve her bir yüksek çift, 2 serbestlik derecesi bırakarak bir bağ empoze eder.
Üst üste binen bağların sayısı, ortadan kaldırılması mekanizmanın hareketliliğini artırmayan belirli sayıda fazla (tekrarlanan) bağ içerebilir. Sonuç olarak, düz bir mekanizmanın serbestlik derecesi sayısı, yani hareketli kinematik zincirinin rafa göre serbestlik derecesi sayısı, aşağıdaki Chebyshev formülü ile belirlenir:
(2.4)
Biliniyorsa buradan yedekli bağlantıların sayısını bulabilirsiniz.
(2.5)
"p" indeksi şu gerçeği ifade eder: Konuşuyoruz ideal olarak düz bir mekanizma hakkında veya daha doğrusu düz şeması hakkında, çünkü üretim hataları nedeniyle düz bir mekanizma bir dereceye kadar mekansaldır.
(2.2)-(2.5) formüllerine göre, mevcut mekanizmaların yapısal bir analizi ve yeni mekanizmaların yapısal diyagramlarının bir sentezi gerçekleştirilir.
Mekanizmaların yapısal analizi ve sentezi.
Yedekli bağlantıların makinelerin performansı ve güvenilirliği üzerindeki etkisi.
Yukarıda belirtildiği gibi, isteğe bağlı (belirli sınırlar dahilinde) bağlantı boyutlarında, yedek bağlantılara () sahip bir mekanizma, bağlantıları deforme etmeden monte edilemez. Bu nedenle, bu tür mekanizmalar artan üretim doğruluğu gerektirir, aksi takdirde, montaj işlemi sırasında mekanizmanın bağlantıları deforme olur, bu da kinematik çiftlerin yüklenmesine neden olur ve önemli ek kuvvetlerle bağlantılara (mekanizmanın olduğu ana dış kuvvetlere ek olarak) neden olur. iletilmesi amaçlanmıştır). Aşırı bağlantılara sahip bir mekanizmanın imalatında yetersiz hassasiyetle, kinematik çiftlerdeki sürtünme büyük ölçüde artabilir ve bağlantıların sıkışmasına neden olabilir, bu nedenle bu açıdan mekanizmalardaki aşırı bağlantılar istenmez.
Mekanizmanın kinematik zincirlerindeki gereksiz bağlantılara gelince, makineler tasarlanırken, tasarımın karmaşıklığı veya başka nedenlerle tamamen ortadan kaldırılmasının kârsız olduğu ortaya çıkarsa, bunlar ortadan kaldırılmalı veya minimum miktarda bırakılmalıdır. Genel durumda, gerekli teknolojik ekipmanın mevcudiyeti, üretim maliyeti, gerekli hizmet ömrü ve makinenin güvenilirliği dikkate alınarak en uygun çözüm aranmalıdır. Bu nedenle, bu her özel durum için çok zor bir iştir.
Örnekler kullanarak mekanizmaların kinematik zincirlerindeki gereksiz bağlantıları belirleme ve ortadan kaldırma metodolojisini ele alacağız.
Dört tek hareketli dönme çiftine sahip düz bir dört bağlantı mekanizmasına izin verin (Şekil 2.15, a ) imalat hatalarından dolayı (örneğin eksenlerin paralel olmamasından dolayı) A ve D ) uzaysal olduğu ortaya çıktı. Kinematik zincirlerin montajı 4 , 3 , 2 ve ayrı ayrı 4 , 1 zorluklara neden olmaz, ancak puan B, B eksene yerleştirilebilir X . Ancak, rotasyonel bir çift oluşturmak için AT , bağlantılardan oluşan 1 ve 2 , sadece koordinat sistemlerini birleştirerek mümkün olacaktır. Bxyz ve Bxyz noktanın doğrusal bir yer değiştirmesini (deformasyon) gerektiren x ekseni boyunca B bağlantısı 2 ve bağlantının açısal deformasyonları 2 x ve z eksenleri etrafında (oklarla gösterilmiştir). Bu, mekanizmada (2.3) formülüyle de doğrulanan üç fazla bağ olduğu anlamına gelir: . Bu uzamsal mekanizmanın statik olarak belirlenebilir olması için, örneğin Şekil 2'de gösterilen diğer yapısal şemasına ihtiyaç vardır. 2.15, b , nerede Böyle bir mekanizmanın montajı, noktaların hizalanmasından bu yana, sızdırmazlık olmadan gerçekleşecektir. B ve B noktayı hareket ettirerek mümkün olacakİTİBAREN silindirik bir çiftte.
Mekanizmanın bir çeşidi mümkündür (Şekil 2.15, içinde ) iki küresel çiftle (); Bu durumda, bunun dışındatemel hareketlilikmekanizma beliriryerel hareketlilik- biyel kolunu döndürme yeteneği 2 kendi ekseni etrafında Güneş ; bu hareketlilik, mekanizmanın temel hareket yasasını etkilemez ve menteşelerin aşınmasını dengelemek açısından bile faydalı olabilir: biyel 2 mekanizmanın çalışması sırasında dinamik yükler nedeniyle kendi ekseni etrafında dönebilmektedir. Malyshev formülü, böyle bir mekanizmanın statik olarak belirleneceğini doğrular:

Pirinç. 2.15
En basit ve etkili yöntem cihaz mekanizmalarında gereksiz bağlantıların ortadan kaldırılması - iki alt çiftli bir bağlantı yerine nokta temaslı daha yüksek bir çiftin kullanılması; Bu durumda düz mekanizmanın hareketlilik derecesi değişmez, çünkü Chebyshev formülüne (at) göre:
Şek. 2.16, a, b, c Kademeli olarak hareket eden bir makaralı iticiye sahip bir kam mekanizmasındaki fazla bağlantıların ortadan kaldırılmasına ilişkin bir örnek verilmiştir. Mekanizma (Şekil 2.16, a ) - dört bağlantı (); ana hareketlilik hariç (kam dönüşü 1
) yerel hareketlilik var (yuvarlak silindirik bir silindirin bağımsız dönüşü 3
kendi ekseni etrafında) Sonuç olarak, . Düz şemada yedek bağlantı yoktur (mekanizma parazitsiz olarak monte edilir). Üretimdeki yanlışlıklar nedeniyle mekanizma mekansal olarak kabul edilirse, o zaman silindirin doğrusal teması ile 3 kam 1 ile Malyshev'in formülüne göre , elde ederiz, ancak belirli bir koşul altında. Kinematik çift silindir - silindir (Şekil 2.16, 6
) bağlantıların göreceli dönüşü imkansız olduğunda 1 , 3 z ekseni etrafında üçlü bir çift olacaktır. Üretimdeki yanlışlıklar nedeniyle böyle bir dönüş gerçekleşirse, ancak küçükse ve doğrusal temas pratik olarak korunursa (yükleme altında, temas yaması bir dikdörtgene yakındır), o zaman bu 
kinematik çift bu nedenle dört hareketli olacaktır ve
Şekil2.17
Namlu biçimli bir silindir kullanarak en yüksek çiftin sınıfını azaltmak (nokta temaslı beş hareketli çift, Şekil 2.16, içinde ), ve için elde ederiz - mekanizma statik olarak belirlenir. Bununla birlikte, bağlantıların doğrusal temasının, artan üretim doğruluğu gerektirmesine rağmen, nokta temasından daha büyük yükleri aktarmanıza izin verdiği unutulmamalıdır.
Şekil 2.16, d, e dört bağlantılı bir dişlide (, tekerleklerin dişlerinin teması) fazlalık bağlantıların ortadan kaldırılması için başka bir örnek verilmiştir. 1, 2 ve 2, 3 - doğrusal). Bu durumda, Chebyshev formülüne göre, - düz şemada fazladan bağlantı yoktur; Malyshev formülüne göre, mekanizma statik olarak belirsizdir, bu nedenle, özellikle üç tekerleğin geometrik eksenlerinin paralelliğini sağlamak için yüksek üretim doğruluğu gerekli olacaktır.
Avara dişlerinin değiştirilmesi 2 namlu şeklinde (Şekil 2.16, d ), statik olarak belirli bir mekanizma elde ederiz.





