Dersler. Test: Mekanizmaların kinematik analizi
2. MEKANİZMALARIN KİNEMATİK ANALİZİ
2.1. Kinematik analizin amaç ve hedefleri
Mekanizma Sentezi- tasarım - teorik nitelikte önemli zorluklara sahiptir, bu nedenle uygulamalı mühendislik görevlerini yerine getirirken analizden daha az yaygındır.
Mekanizma analizi- değişim yasalarını incelemek için ana parametrelerinin incelenmesi ve buna dayanarak, bilinen bir dizi mekanizma arasından en iyi mekanizmanın seçimi. Sentez ile karşılaştırıldığında, mekanizma analizi pratikte yaygın olarak kullanılmaktadır.
Hedefler:
Bağlantıların kinematik özelliklerinin belirlenmesi: yer değiştirme; hız; hızlanma; hareket yörüngesi; giriş (önde gelen) bağlantıların bilinen hareket yasalarına sahip konum işlevi.
Çalışma (çıktı) bağlantısının kinematik çalışma koşullarının değerlendirilmesi.
Mekanizmanın güç, dinamik, enerji ve diğer hesaplamalarını yapmak için gerekli sayısal verilerin belirlenmesi.
Görevler:
mekanizmanın bağlantılarının konumları hakkında. Noktaların hareket yörüngelerinin belirlenmesi;
bağlantıların hızları veya mekanizmanın bireysel noktaları hakkında;
bağlantıların hızlanması veya mekanizmanın bireysel noktaları hakkında.
yöntemler:
grafik (veya grafik ve diyagram yöntemi);
grafik-analitik (veya hız ve ivme planı yöntemi);
analitik;
deneysel.
Mekanizmanın kinematik analizi aşağıdaki sırayla gerçekleştirilir: ilk önce ilk bağlantıların hareketi incelenir ve daha sonra mekanizmanın oluşumu sırasında bağlanma sırasına göre bireysel yapısal grupların analizi yapılır. Bu durumda, her yapısal grupta, bu grubun bağlı olduğu elemanların konumları, hızları ve ivmeleri bilinecektir. Her Assur grubunun kinematik analizi, grubun dahili çiftlerinin kinematik parametrelerinin belirlenmesiyle başlamalıdır. Daha sonra grubun kalan noktalarının parametreleri ve bağlantılarının açısal hızları ve ivmeleri belirlenir.
Assur gruplarının her sınıfı, belirli bir kinematik analiz yöntemine karşılık gelir.
Sonuç olarak, mekanizmanın kinematik analizlerine ancak işlem tamamlandıktan sonra başlanmalıdır. yapısal Analiz Assur gruplarına katılma prosedürü buna göre belirlenir.
Ayrıca, kinematik analiz yapmadan önce, koşulun gözetilmesine dikkat etmek gerekir. marş bağlantıları kinematik çiftler halinde. Bağlantıların boyutlarının bazı oranları için, geometrik nedenlerle dönmeleri imkansızdır. Kuvvet faktörleri ayrıca bağlantıların kranklanmasını da etkileyebilir.
Baklaların kranklanabilirliği, mekanizmanın performansını belirleyen ana faktördür.
2.2. Grafiksel kinematik analiz yöntemi
Bu yöntemin avantajı netliği ve basitliğidir. Pistonlu hareket gerçekleştiren bağlantıların kinematik analizi için iyidir. Yöntemin dezavantajı, grafik yapıların doğruluğuna bağlı olan düşük doğruluktur.
Konum sorunu Bu, önde gelen bağlantının çeşitli ardışık konumları ile seçilen uzunluk ölçeğinde mekanizmanın birkaç birleşik planının oluşturulmasıyla çözülür.
Hızlarla ilgili sorunlar ve ivmeler incelenen noktanın yer değiştirmelerinin, hızlarının ve ivmelerinin grafikleri (diyagramları) oluşturularak çözülür.
Kinematik analiz dizisi:
İlk olarak, mekanizmanın birkaç (çoğunlukla 12 veya daha fazla) birleşik planı, keyfi olarak seçilen bir uzunluk ölçeğinde inşa edilir.
Ardından, incelenen nokta veya bağlantının yolunun (yer değiştirmesinin) bir grafiği oluşturulur, bu amaçla mekanizmanın birleşik planları ve incelenen nokta veya bağlantının ardışık konumları kullanılır.
Yer değiştirme grafiğinin grafiksel farklılaşmasıyla, incelenen noktanın hızının bir grafiği oluşturulur.
Hız grafiğinin grafiksel farklılaşması, bir ivme grafiği oluşturur.
Akor yöntemi ve teğet yöntemi ile grafik türevlendirme yapılabilir. Doğruluğu artırmak için her iki yöntemi aynı anda kullanmak uygundur.
Mekanizmanın ilk halkasının hareketi sabit bir açısal hızla gerçekleştirilirse, açısal ivme
 sıfıra eşittir.
sıfıra eşittir.
İlk mekanizmanın açısal hızla hareketi ![]() ve
ve  mekanizmanın kalıcı veya ana hareketi olarak adlandırılır.
.
mekanizmanın kalıcı veya ana hareketi olarak adlandırılır.
.
Mekanizmanın kinematik şeması kesinlikle ölçeklendirmek için yapılmıştır.
TMM'deki ölçek faktörü, SI birimlerinde ölçülen doğal değerin oranıdır, yani. m (metre) cinsinden, onu gösteren parçanın uzunluğuna, mm olarak ölçülür.
Mekanizma planının ölçek faktörü şu şekilde gösterilir:
 =
=
 - Ölçek faktörü.
- Ölçek faktörü.
 _ metre cinsinden ölçülen gerçek bağlantı uzunluğu
_ metre cinsinden ölçülen gerçek bağlantı uzunluğu
AB - çizimde milimetre cinsinden bağlantı uzunluğu
İlk bağlantının belirli bir konumuna veya birkaç serbestlik derecesine sahip mekanizmalar için ilk bağlantılara karşılık gelen mekanizmanın kinematik diyagramının görüntüsüne mekanizmanın planı denir.
ÖRNEK. Krank-kaydırıcı mekanizmasının kinematik analizini yapın
Mekanizmanın kinematik analizi grafiksel bir yöntemle gerçekleştirilecektir.
Bunu yapmak için, ilk bağlantı dönme çiftine dahil edilmişse, açılarla döndürülür.  diğer tüm bağlantıların yer değiştirmelerini belirleyin.
diğer tüm bağlantıların yer değiştirmelerini belirleyin.
Bağlantıların konumu için planların yapımı aşağıdaki gibi gerçekleştirilir.
Bağlantıların hareketlerinin veya hızlarının belirlenmesi, mekanizmanın bir veya daha fazla halkasının katılımı olmadan yapılabiliyorsa, bu bağlantılar ya pasif kısıtlamalar ya da ekstra serbestlik dereceleri getirir.
Kinematik diyagramların oluşturulması
Mekanizmaların kinematik çalışmasında, incelenen mekanizmanın tam bir hareket döngüsü için yapılması gerekir. Bunu yapmak için, mekanizmanın birbirine oldukça yakın bir dizi konumu için hızların, ivmelerin hareketinin analitik veya grafiksel bir çalışması gerçekleştirilir. Pratik TMM görevlerinde, her kinematik diyagram genellikle bağlantının kinematik parametrelerinden birindeki bir değişikliğin grafik temsilidir: yer değiştirme, hızlanma, incelenen mekanizmanın bağlantı noktasının hızı, zamanın bir fonksiyonu olarak veya mekanizmanın ilk bağlantısı, yani. genelleştirilmiş koordinat fonksiyonunda.
Örnek olarak, ABC krank kaydırma mekanizmasının "C" noktasının kalıcı hareketi için S C \u003d SC (t) kinematik diyagramlarının yapısını düşünün, yani. krank sabit bir açısal hızda döndüğünde  .
.
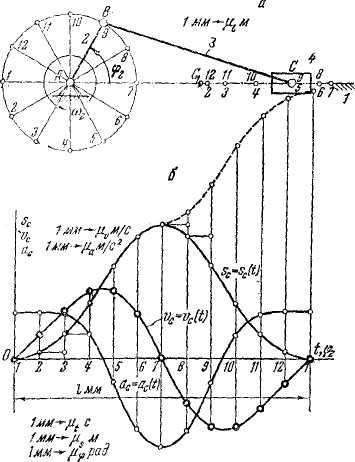
Şekil 3.1 Krank kaydırıcısı
mekanizma:
a) kinematik şema;
c) bağımlılıkları gösteren grafikler
SC =SC(t); - yer değiştirme tablosu
Vc = Vc(t); - hız tablosu
bir c = bir c(t); - hızlanma diyagramı
Bunu yapmak için B ve C noktalarının yollarını işaretleyeceğiz. Kaydırıcının en sol konumundan C noktasının yer değiştirmelerini bildirmek uygundur. Koordinat eksenlerini çiziyoruz ve bir ölçek olan x ekseni üzerinde l MM segmentini çiziyoruz  zaman T bir tam dönüş krank, yani T=
zaman T bir tam dönüş krank, yani T= 
burada: n, dakikadaki devir cinsinden krank hızıdır,
sonra 
Bir yer değiştirme diyagramı oluşturma
l segmenti 12 eşit parçaya bölünür ve karşılık gelen 1,2,3 vb. noktalarda, kaydırıcının en soldaki Cı konumundan “C” noktasının kat ettiği mesafeyi bir kenara koyarız. Böylece 2. noktada, y eksenine paralel yönde, C 1 C 2 doğrultusunu ayırdık; nokta 3 parçalı C 1 C 3, vb.
C 1, C 2, C 1 C 3 segmentleri doğrudan diyagramdan ayrılırsa (Şekil a), o zaman
y ekseni boyunca S C = S C (t) diyagramının ölçeği μ i 'ye eşit olacaktır, yani. ölçek
şema yapımı. C 7 konumundan, C noktası en sağı aldığında
konumunda, C7C8, C7C9 mesafeleri C7 konumunda çizilen C1C7 koordinatından çıkarılır ve böylece krank 2 başlangıç konumuna geldiğinde konumdaki S C =SC (t) eğrisinin koordinatı sıfıra eşit olacaktır.
Ortaya çıkan eğri, C noktasının aşırı uçtan uzaklıklarının eğrisidir.
kaydırıcı sol konum. Kat edilen yolların bir eğrisini oluşturmanız gerekiyorsa
C noktası, daha sonra C 7 konumundan, C 7 C 8, C 7 C 9 mesafeleri, şek. b) - yol eğrisinin bir kısmı kısa çizgilerle gösterilir. Çünkü krank sabit bir açısal hızda döner  2 , o zaman apsis ekseninin zaman olmadığını varsayabiliriz t, ve dönüş açıları φ 2 bağlantı 2 , yani. S C =S C (t) diyagramları aynı anda S C =S C (φ 2) diyagramları olacaktır. Ölçek μ φ \u003d 2π / l, burada l segmenti çizimden mm olarak alınmalıdır.
2 , o zaman apsis ekseninin zaman olmadığını varsayabiliriz t, ve dönüş açıları φ 2 bağlantı 2 , yani. S C =S C (t) diyagramları aynı anda S C =S C (φ 2) diyagramları olacaktır. Ölçek μ φ \u003d 2π / l, burada l segmenti çizimden mm olarak alınmalıdır.
Yöntemle hız ve ivme diyagramlarının oluşturulması
grafik farklılaşma
Bağlantı yer değiştirmelerinin kinematik diyagramına sahip olarak, grafiksel türev yoluyla bir hız diyagramı elde etmek mümkündür. Hız diyagramını oluşturma sırasını düşünün akor yöntemi.
Yer değiştirme şemasında akorlar çiziyoruz: ah, ah, vb.
2. Hız diyagramı ve eksenin devamı için koordinat eksenlerini oluşturuyoruz
apsis (ot) sola, kutup mesafesini (OP V) bir kenara koyun
 = 30 - 60 mm.
= 30 - 60 mm.
3. P V kutbundan kirişlere paralel 1, 2, 3, ..., vb. ışınları çiziyoruz.
ah, ah, vb. y ekseni ile kesişme noktasına: 1 ' , 2 ' , 3 ' , ….
4. 1 ', 2 ', 3 ' noktalarından ortaya yatay çizgiler çizin
karşılık gelen zaman aralıkları (1 '' , 2 '' , 3 '' , ...).
5. Elde edilen noktaları düzgün bir eğri ile birleştiririz.
6. Hız ölçeğini hesaplayın.
Açısal yer değiştirme diyagramını farklılaştırırken, sırasıyla, bir ölçekte açısal hızların diyagramını elde ederiz:
Bir ivme grafiği elde etmek için hız grafiğinin grafiksel farklılaşmasını gerçekleştiririz. Burada:
 ;
;
Hız grafiğinin türevini alırken sıfır (12) konumundaki ivme değerinin belirlenmesine dikkat etmek gerekir.
Bunu yapmak için, hız grafiğini bir sonraki döngüye devam ettirerek kirişi (12 - 1) kullanın.
zaman ölçeği formül kullanılarak hesaplanabilir
 ,
,
nerede T- krankın bir devir süresi, s; L X- yer değiştirme grafiğindeki (şema) 1 ve 1 noktaları arasındaki segmentin uzunluğu, mm.
dönemden beri T formüller kullanılarak hesaplanabilir
 , veya
, veya  , İle birlikte,
, İle birlikte,
nerede ω 1 krankın açısal hızı, 1/s; n 1 krank dönüş frekansı, rpm, sonra zaman ölçeğidir
 , s/mm.
, s/mm.
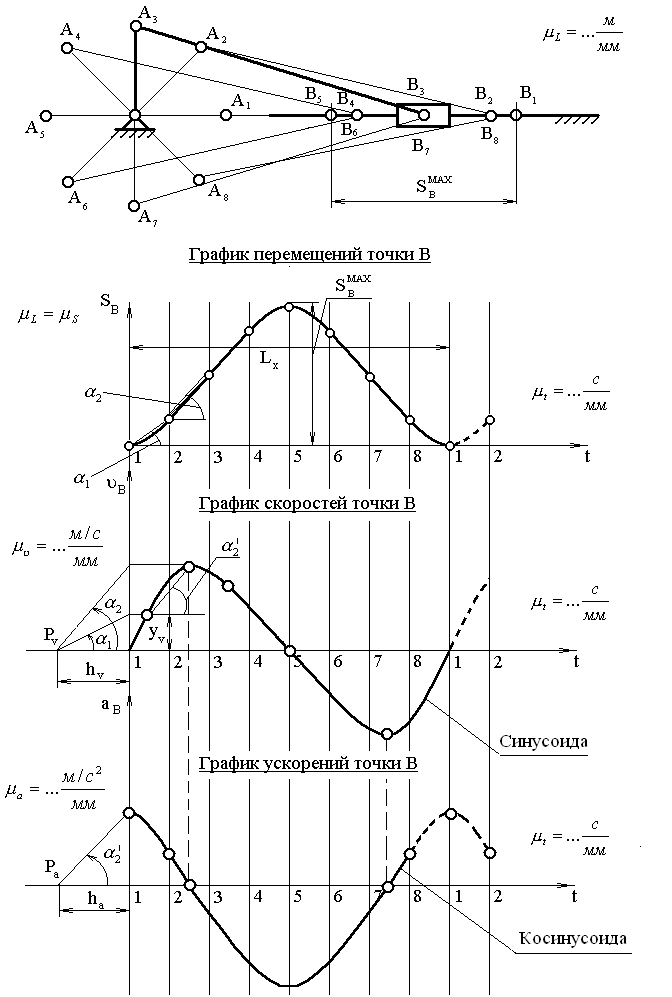 Pirinç. 3.2. Mekanizmanın birleşik planları,
Pirinç. 3.2. Mekanizmanın birleşik planları,
yer değiştirme, hız ve ivme grafikleri
3. Kinematik analiz örnekleri
3.1. Geometrik olarak değişmez sistemlerin oluşumu için kurallar
Sistemin geometrik olarak değişmeyen herhangi bir parçası diyoruz. disk.
Kural 1: düğüm, diske aynı düz çizgi üzerinde yer almayan iki bağlantı ile bağlanır (Şekil 3.1).
Kural 2: bir disk, bir noktada kesişmeyen ve birbirine paralel olmayan üç bağlantı ile başka bir diske bağlanır (Şekil 3.2).
İki bağın kesişme noktası bir menteşe olarak kabul edilebilir - gerçek veya hayali. Bu nedenle, kural 2, menteşeli iki diskin bağlantısı ve menteşeden geçmeyen bir bağlantı olarak yorumlanabilir. Örneğin, Şekil 2'de gösterilen iki disk. 3.3, gerçek bir menteşe A ve bağlantı 3 ile bağlanır. Disklerin, hayali bir menteşe B ve bağlantı 1 ile bağlı olduğu da düşünülebilir.
Şekil 3.1. Diske düğüm ekleme
Şekil 3.2. İki diski üç bağlantıyla bağlama
Şekil 3.3. İki diski bir menteşe ve bir çubukla bağlama:
A gerçek bir menteşedir; B - hayali menteşe
Kural 3: üç disk, bir düz çizgi üzerinde yer almayan üç menteşe ile birbirine bağlanmıştır (Şekil 3.4). Menteşeler gerçek veya sahte olabilir.
Şekil3.4. Üç menteşeli üç diskin bağlantısı
Bu kurallardan herhangi biri ihlal edilirse, sistem geometrik olarak değişebilir veya anında değişebilir hale gelir.
Sistem, listelenen kurallar kullanılarak oluşturulmuşsa, mutlaka geometrik olarak değişmez olacaktır.
eğer kinematik analiz geometrik olarak değişmez bir sistemde bulunurn yedekli bağlantılar, ardından sistemn kez statik olarak belirsiz. Yedekli bağlantıların yokluğunda sistem statik olarak belirlenir.
Eğitimi bu kurallara uyan sistemlere basit eğitim sistemleri denir. Oluşum sırası yukarıda belirtilen kurallarla belirlenemeyen sistemler vardır. Bu tür sistemlerin kinematik analizi için, örneğin bu kılavuzda ele alınmayan bağları değiştirme yöntemi gibi başka yöntemler kullanılır.
3.2. Sistemin serbestlik derecesi
Sistemin serbestlik derecesi W sistemin uzaydaki konumunu belirleyen bağımsız parametrelerin sayısıdır.
Belirtmek:
D sistemin oluşturulduğu disk sayısıdır;
W diskleri birbirine bağlayan basit menteşelerin sayısı;
İTİBAREN diskleri birbirine bağlayan bağlantıların sayısıdır;
İTİBAREN O, diskleri zemine bağlayan destek bağlantılarının sayısıdır.
Basit menteşe iki diski birbirine bağlayan menteşe olarak adlandırılan bu tür bir menteşe, iki bağlantıya eşdeğerdir. Menteşe bağlanırsa d diskler denir çoklu menteşe ve onun çokluk İle =d–1 kaç tane basit menteşeye eşdeğer olduğunu gösterir (Şekil 3.5).
Şekil 3.5. Basit ( a) ve katları ( M.Ö) menteşeler
İsteğe bağlı bir düz sistem için
G = 3D - 2Sh - S - S Ah,(1)
ayrıca diskler gereksiz bağlantılar içermemelidir.
Menteşeli kafes kirişler için serbestlik derecesi daha basit bir formülle belirlenebilir.
W \u003d 2U - C - C Ah (2)
nerede saat– çiftlik düğümlerinin sayısı; İTİBAREN- kafes çubukların sayısı; İTİBAREN O, destek bağlantılarının sayısıdır.
Eğer bir W >
Eğer bir W
Eğer bir W< 0, то система геометрически неизменяемая и статически неопределимая.
Geometrik değişmezlik koşullarının bilinmesi önemlidir. W= 0 veW<0 являются необходимыми, но недостаточными. Для окончательного вывода о виде системы следует анализировать порядок образования системы (см. примеры ниже).
örnek 1 Kirişin kinematik analizi (Şekil 3.6, a).
Kiriş aşağıdaki sırayla monte edilir:
1. aşama. Disk 1 (çubuk ABC), üç bağlantı yardımıyla bir disk gibi dünyaya bağlanır (kural 2, Şekil 3.6, b).
Şekil 3.6. Kiriş Montaj Sırası
2. aşama. Disk 2 (çubukCDE ) menteşe C ve bir noktada bir destek bağlantısı kullanarakD (kural 2 seçeneği, Şekil 3.6, içinde).
3. aşama. Disk 3 (çubukEF ) menteşeliE ve bir noktada referans bağlantısıF (kural 2 seçeneği, Şekil 3.6, G). Bu, kirişin montajını tamamlar.
Bir kirişin oluşumundan beri (Şekil 3.6, a) yerleşik kurallara uyar ve ek (yedek) bağlantı bulunmazsa, verilen sistem geometrik olarak değişmez ve statik olarak belirlenir (GN SS ).
Örnek 2 Çiftliğin kinematik analizi (Şekil 3.7, a).
Çiftlik aşağıdaki sırayla monte edilir:
1. aşama. Üç çubuk (1-2, 2-4, 1-4), üç disk gibi, kural 3'e göre üç menteşe (1, 2, 4) ile bağlanır.
2. aşama. Düğüm 3, oluşturulan Disk 1'e (1-2-4) kural 1'e göre 1-3 ve 4-3 çubukları yardımıyla bağlanır.
3. aşama. Düğüm 6, kural 1'e göre 4-6 ve 3-6 çubukları yardımıyla ortaya çıkan Disk 2'ye (1-2-4-3) bağlanır.
4. aşama. Düğüm 5, kural 1'e göre 3-5 ve 6-5 çubuklarının yardımıyla ortaya çıkan Disk 3'e bağlanır.
5. aşama. Ortaya çıkan kafes kiriş, kural 2'ye göre üç destek bağı ile yere bağlanır.
Şekil 3.7. Çiftlik montaj sırası: a- çiftlik; b- montaj adımları
Bir çiftliğin oluşumundan bu yana (Şekil 3.7, a) yerleşik kurallara uyar ve ek (yedek) çubuk tanımlanmadıysa, verilen sistem geometrik olarak değişmez ve statik olarak belirlidir (GN SS ).
Çiftlik farklı bir sırayla monte edilebilir, ancak her durumda çıktı aynı olacaktır.
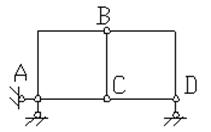
Örnek 3 Çerçevenin kinematik analizi (Şekil 3.8, a).
Çerçeve aşağıdaki sırayla monte edilir:
1. aşama. AB çubuğu zemine (Şekil 3.8, b'deki Disk 1), üç bağa (kural 2) eşdeğer olan sert bir sıkıştırma kullanılarak bağlanır.
Şekil 3.8. Çerçeve Montaj Sırası
2. aşama. Disk 2 (çubuk BCD), oluşturulan “Dünya + Disk 1” sistemine menteşe B ve C noktasında iki bağlantı yardımıyla bağlanır (Şekil 3.8, içinde).
Kural 2'ye göre, C noktasında bir bağlantı olması yeterlidir, dolayısıyla ikinci bağlantı gereksizdir.
3. aşama. Disk 3, ortaya çıkan “Dünya + Disk 1 + Disk 2” sistemine bağlanır (Şekil 2.8'deki çubuk DE, G) menteşe D ile ve destek çubuğu E noktasında (kural 2).
Çerçevenin oluşumundan bu yana (Şekil 3.8, a) yerleşik kurallara uyar ve bir yedek bağlantı ortaya çıkar, ardından verilen sistem geometrik olarak değişmez ve bir kez statik olarak belirsizdir (GN SN).
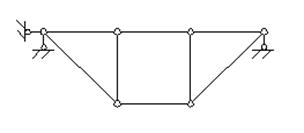
Örnek 4 Çiftliğin kinematik analizi (Şekil 3.9, a).
Çiftlik bu sırayla monte edilir.
1. aşama. Üç çubuktan (1-2, 2-4, 1-4) bir disk oluşur - 1-3 ve 4 numaralı çubuklarla düğüm 3'ün (kural 1) tutturulduğu bir 1-2-4 üçgeni (kural 3) -3. Ortaya çıkan disk 1-2-4-3, Disk 1'i oluşturan üç destek bağlantısı (kural 2) ile zemine bağlanır (Şekil 3.9, b).
2. aşama. Üç çubuk (5-6, 6-7, 5-7) kural 3'e göre Disk 2'yi oluşturur (Şekil 3.9, içinde).
3. aşama. Disk 2, Disk 1'e üç bağlantı (4-6, 3-5, 7-8) ile bağlanır, ancak tüm bu bağlantılar bir noktada kesiştiği için 7. kural ihlal edilir. Disk 1 ve Disk 2'nin düğüm 7'ye göre sonsuz küçük bir açıyla karşılıklı döndürülmesi mümkündür.
Şekil 3.9. Çiftlik Montaj Sırası
2. kuralın ihlali nedeniyle, verilen sistem anında değişebilir ve yapı için bir tasarım şeması olarak hizmet edemez.
Örnek 5 Kirişin serbestlik derecesini bulun (bkz. Şekil 3.6, a).
Kiriş üç diskten (çubuk) oluşurAC,CE,EF , iki basit menteşe C ve E ile birbirine bağlı ve beş destek bağlantısı ile zemine bağlı. Bu yüzden D = 3,W = 2, İTİBAREN = 0, İTİBARENО = 5 ve formül (1) ile elde ederizW = 3 3 - 2 2 - 0 - 5 = 9 - 9 = 0, geometrik olarak değişmeyen ve statik olarak belirli bir sistemin gerekli bir özelliğidir. Bu sonuç örnek 1'de doğrulanmıştır.
Örnek 6 Çiftliğin serbestlik derecesini bulun (bkz. Şekil 3.7, a).
Formül (1)'i kullanacağız ve her bir kiriş çubuğunu bir disk olarak ele alacağız, yani. D= 9. Menteşeler 2 ve 5, her biri iki kafes çubuğu birbirine bağlar, bu nedenle basittirler. Menteşeler 1 ve 6, her biri üç kafes çubuğunu birbirine bağlar, böylece çift olurlar. Menteşeler 3 ve 4 üçlüdür. Toplam basit menteşe sayısı W = 2 1 + 2 2 + 2 3 =12. Üç destek bağlantısı vardır.
alırız W= 3 9 - 2 12 - 3 = 27 - 27 = 0.
İTİBAREN = 9, saat= 6, İTİBAREN O = 3.
alırız W\u003d 2 6 - 9 - 3 \u003d 12 - 12 \u003d 0.
Bu örnek formül (2)'nin formül (1) üzerindeki avantajını göstermektedir. Sistemin GN CO işareti örnek 2'de doğrulanmıştır.
Örnek 7 Çerçevenin serbestlik derecesini bulun (bkz. Şekil 3.8, a).
Çerçeve üç diskten oluşurAB,BCD veDE birbirine iki basit menteşe ile bağlıBantD. Çerçeve, altı destek dirseğiyle (üç katı bağlantı A'da, ikisi destek C'de, biri destek E'de) ile zemine bağlanır. Bu yüzden D= 3, W = 2, İTİBAREN= 0, İTİBARENО = 6 ve formül (1) ile elde ederiz
W= 3 3 – 2 2 – 0 – 6 = –1, sistemin SN'sinin GN'sinin gerekli bir işaretidir. Bu sonuç örnek 3'te doğrulanmıştır.
Örnek 8. Çiftliğin serbestlik derecesini bulun (bkz. Şekil 3.9, a).
Formül (2)'yi kullanırken, İTİBAREN = 10, saat = 7, İTİBAREN O = 4.
alırız W= 2 7 – 10 – 4 = 14 – 14 =0, GN CO sistemini gösterir. Bununla birlikte, çiftliğin oluşumunun analizi (bkz. örnek 4), sistemin anlık değişkenliği hakkında sonuca varır. Bu örnek, sistemin türü hakkında nihai sonuç için formülle sistemin serbestlik derecesinin hesaplanmasının yetersizliğini göstermektedir.
Örnek 9. Sistemin kinematik analizi (Şekil 3.10, a).
Sistem, beş bağlantı 1…5 ile birbirine bağlanan üç D1, D2 ve D3 diskinden oluşur. D1 ve D3 diskleri, her biri iki destek bağlantısına eşdeğer olan mafsallı destekler A ve B ile yere bağlanır. Bu yüzden D = 3, W = 0, İTİBAREN = 5, İTİBARENО = 4 ve formül (1) ile elde ederiz
W= 3 3 - 2 0 - 5 - 4 = 9 - 9 = 0.
Sistem aşağıdaki sırayla monte edilir:
1. aşama. D2 ve D3 diskleri, kural 2'ye göre 3, 4, 5 bağlantıları ile bağlanır ve yeni bir D diski oluşturur (Şekil 3.10, b);
2. aşama. Kural 3'e göre üç disk (D1, D ve toprak) üç menteşe ile bağlanır: gerçek A, B ve hayali C, tek bir düz çizgide uzanmaz.
Bu nedenle sistem GN CO'dur.
Şekil 3.10. Şemalar örneğin 9
Örnek 10 Sistemin kinematik analizi (Şekil 3.11).
Formül (1) kullanarak sistemin serbestlik derecesini hesaplamak için iki seçeneği ele alıyoruz. İlk varyantta, sistemin beş diskten oluştuğunu düşünüyoruz - kırık çubuklarABC,ADC ve düz çubuklarOLMAK.CE,D.E.
Daha sonra menteşeler A ,b,D basittir ve C ve E menteşeleri çifttir.
saat D = 5, W = 7, İTİBAREN = 0, İTİBAREN O = 3 elde ederiz
W= 3 5 - 2 7 - 0 - 3 = 15 - 17 = -2.
Şekil 3.11. Şema örneğin 10
İkinci varyantta, sistemin üç diskten oluştuğunu düşünüyoruz -ABC,ADC veBasit bir menteşe A, bir çift menteşe C ve iki bağlantı ile bağlanan ECOL veD.E.
saat D = 3, W = 3, İTİBAREN = 2, İTİBAREN O = 3 elde ederiz
W= 3 3 - 2 3 - 2 - 3 = 9 - 11 = -2.
Not: Yalnızca iki diskten (kırık çubuklar) oluşan bir sistemi düşünemezsiniz. ABC ve ADC ), çünkü bu durumda çubuklar OLMAK. CE, DE'ler diskleri birbirine bağlamaz.
Sistem aşağıdaki sırayla monte edilir:
1. aşama Diskler ABC veADC'ler, iki menteşe A ve C ile bir diske bağlanır, yani biri yedekli olacak dört bağlantı (kural 2).
Aşama 2. Düğüm E, biri yedek olacak olan üç bağlantıyla elde edilen diske eklenir (kural 1).
Aşama 3. İki yedek bağlantıya sahip birleştirilmiş disk, üç destek bağlantısıyla (kural 3) zemine bağlanır.
Bu nedenle verilen sistem GN SN'dir (iki kez).
Örnek 11. Sistemin kinematik analizini gerçekleştirin (Şekil 3.12).
Sistemin serbestlik derecesini P.L. Chebyshev formülüne göre belirliyoruz:
W \u003d 3D - 2Sh - C 0,
nerede D- disk sayısı, W basit menteşelerin sayısıdır, 0'dan itibaren- çubuk sayısı.
Şekil 3.12. Şema örneğin 11
Tüm menteşeleri ve destek çubuklarını atarak, sistemin beş diskten oluştuğunu görüyoruz ( D=5). Destek çubuklarını atarak, basit olanlara indirgenmiş menteşe sayısını belirliyoruz ( W=6: iki nokta AT ve İTİBAREN, tek tek - noktalarda ANCAK ve D). Destek çubuklarının sayısı - 0'dan itibaren =3.
Buradan W= 3 ∙ 5 – 2 ∙ 6 – 3 = 0, yani sistem geometrik olarak değişmez ve statik olarak belirsiz olabilir. Durumun böyle olduğunu doğrulamak için sistemin yapısını analiz edelim. disklerden beri AB, Güneş ve ACüç menteşe ile bağlı ANCAK , AT ve İTİBAREN düz bir çizgi üzerinde uzanmazlar, daha sonra diskin sıkıca tutturulduğu bir disk oluştururlar. VD menteşe ile AT ve çubuk SD ekseni menteşe merkezinden geçmeyen . Bu değişmez figür, bir noktada kesişmeyen üç çubuk kullanılarak yere sağlam bir şekilde bağlanmıştır. Böylece sistem (Şekil 1.14) geometrik olarak değişmezdir ve anında değiştirilemez.
Örnek 12. Sistemin kinematik analizini gerçekleştirin (Şekil 3.13).
Şekil3.13. Şema örneğin 12
Sistem menteşeli olduğu için, serbestlik derecesini belirlemek için formül (2)'yi kullanırız:
W \u003d 2U - C - C 0,
nerede saat– çiftlik düğümlerinin sayısı; İTİBAREN iç çubukların sayısıdır; 0'dan itibaren- destek çubuklarının sayısı.
Burada saat =6, İTİBAREN=8, 0'dan itibaren=3, bu nedenle, W= 2∙6 – 8 – 3 = 1.
Böylece sistem bir serbestlik derecesine sahiptir ve bina yapısı olarak kullanılamaz.
Örnek 13 Çiftliği keşfedin (Şekil 3.14).
Şekil3.14. Şema örneğin 13
Formül (2)'ye göre, çiftliğin serbestlik derecesini belirliyoruz: W= 2 ∙ 7 – 11 – 3 = 0, bu nedenle sistem geometrik olarak değişken ve statik olarak belirli olabilir.
Sistemi analiz edelim. Üç diskten oluşur - üçgenler ABC, CFG ve çubuk DEçubuklarla bağlı OLMAK, AD, ÖRNEĞİN, D.F., hayali menteşelerle değiştirilebilen Yaklaşık 1, Yaklaşık 2 ve menteşe İTİBAREN. Bu nedenle, şu sonuca varabiliriz: tüm çubuklar birbirine katı bir şekilde bağlıdır ve aynı zamanda bir noktada kesişmeyen üç çubuk yardımıyla zemine sağlam bir şekilde bağlıdır.
Sistemi anlık değişkenlik açısından kontrol etmek için şunu uygulayın: yük yolu yok- Dış yük olmaması şartıyla tüm çubuklardaki destek tepkilerini ve kuvvetleri belirleyeceğiz. Tüm sistemin denge koşullarından (Σ MA= 0; Σ MV= 0; Σ saat=0) destek reaksiyonlarının sıfıra eşit olduğunu buluyoruz. Düğümü kesmek E ve tüm kuvvetleri düşey üzerine yansıttığımızda, düşey çubuktaki kuvvetin NDE= 0. Ardından, düğümde yakınlaşan iki kuvvetin izdüşüm denklemlerini yazma D(üçüncü kuvvet - NDE= 0), bu çubuklara normallerin yönlerinde, çubuklardaki kuvvetlerin DA ve D.F. ayrıca sıfıra eşittir. Son olarak, düğümlerin dengesi göz önüne alındığında A, F, B, G, bir yükün yokluğunda sistemin tüm çubuklarındaki kuvvetlerin sıfıra eşit olduğunu, bu nedenle sistemin değiştirilemez olduğunu buluyoruz.
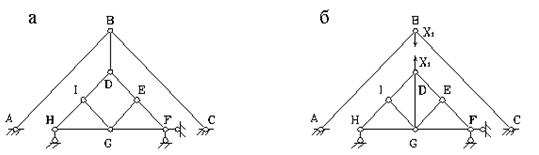
Örnek 14 Sistemin kinematik analizini yapın (Şekil 3.15, a).
Şekil 3.15. Şema örneğin 14
Formül (2) ile serbestlik derecesini belirleriz: W= 2 ∙ 9 - 11 - 7 = 0, yani sistem geometrik olarak değişmez olması için gerekli minimum bağlantıya sahiptir. Sistemin gerçekten değişmez olup olmadığını kontrol etmek için çubuk değiştirme yöntemi. Bir değiştirme sistemi seçelim (Şekil 3.15, b). Burada çubuk düştü BD ve eyleminin yerini kuvvetler alır. 1 ve bir yedek çubuk eklendi Genel Müdürlük. Seçilen değiştirme sistemi değişmezdir: çubuklar AB, Güneş ve dünya, tek bir düz çizgi üzerinde yer almayan üç menteşe ile sıkı bir şekilde bağlanmıştır. Ve sistemin alt kısmı, bir üçgenden oluştuğu için değişmez (örneğin, GHI), diğer tüm düğümlerin ikililer yardımıyla sağlam bir şekilde tutturulduğu ve bunların tümü üç destek çubuğu ile zemine tutturulmuştur.
Şimdi kuvvetlerden yedek çubuktaki kuvveti belirleyelim. 1= 1. Düğümleri sırayla kesmek E, ben, G ve dengelerini göz önünde bulundurarak, değiştirme çubuğundaki kuvvetin sıfır olduğunu elde ederiz, bu nedenle orijinal sistem anında değişebilir.
Örnek 15 Şekil 3.16'da gösterilen sistemin oluşumunu analiz edin. .
Şekil3.16. Şema örneğin 15
İlk olarak, sistemin serbestlik derecesini belirliyoruz. Sistem menteşeli olduğu için (2) formülünü kullanıyoruz. W \u003d 2U - C - C 0. Sistem düğümlerinin sayısı saat=6, sistemin çubuk sayısı İTİBAREN=8, destek çubuklarının sayısı İTİBAREN 0 =3, bu nedenle,W= 2 ∙ 6 - 8 - 3 = 12 - 1 = +1.Sistemin bir serbestlik derecesi vardır ve bina yapısı olarak kullanılamaz.
Örnek 16 Şekil 3.17'de gösterilen sistemin oluşumunu analiz edin, a.
Şekil3.17. Şema örneğin 16
1. Formül (2)'yi kullanma W \u003d 2U - C - C 0 menteşe çubuk sistemleri için serbestlik derecesi sayısını belirleriz. Sistem düğümlerinin sayısından beri saat=6, sistemin çubuk sayısı İTİBAREN=9, destek çubuklarının sayısı İTİBAREN 0 =3, bu nedenle,W= 2 ∙ 6 – 9 – 3 = 0, bu nedenle, sistem değişmez ve statik olarak belirli olmak için gerekli sayıda bağlantıya sahiptir.
2. Sistemin yapısını analiz ederiz. Üçüncü özelliğe göre değişmez bir sistem olan üçgen 123'ü düşünün. Bir sabit disk olarak düşünüldüğünde (Şekil 3.17'de gölgelendirilmiştir, b), ona düğüm 4'ü iki çubukla (3-4 ve 2-4) bağlarız.Bu çubuklar bir düz çizgi üzerinde uzanmaz, bu nedenle, birinci prensibe göre, düğüm 4, disk 123'e sabit bir şekilde bağlanır. Ortaya çıkan sistem aynı zamanda bir sabit sürücüdür (Şekil 3.17'de gölgelendirilmiştir, içinde). Düğüm 5'i iki çubukla (4-5 ve 2-5) bağlayarak, yine Şekil 3.17'de gölgeli bir sabit disk alıyoruz, G). Bu diske son düğüm 6'yı iki çubukla (3-6 ve 5-6) tek bir düz çizgide uzanmayacak şekilde bağlayacağız.
Sistem, yapısal olarak değişmez sistemlerin oluşum ilkelerine göre oluşturulduğundan, değişmez ve anında değiştirilemez. Sistem aynı zamanda bir noktada kesişmeyen üç adet destek çubuğu yardımıyla zemine sağlam bir şekilde bağlanmıştır.
Örnek 17.örneğin 17
1. Formülü kullanma W \u003d 2U - C - C 0 menteşe çubuk sistemleri için serbestlik derecesi sayısını belirleriz. Sistem düğümlerinin sayısından beri saat=9, sistemin çubuk sayısı İTİBAREN=15, destek çubuğu sayısı İTİBAREN 0 =3, bu nedenle,W= 2 ∙9 - 15 - 3 = 0, bu nedenle, sistem geometrik olarak değişmez olmak için gerekli sayıda bağlantıya sahiptir.
2. Sistemin yapısını analiz ederiz. İlk olarak, sistemin açıkça değişmeyen kısımlarını bulalım - üçgenlerden oluşan iki disk (Şekil 3.18'de gölgeli, b). Üç çubukla bağlanırlar. Ancak, bu çubuklar bir noktada kesişir (yani,küzerinde pilav. 3.18, b). Bu nedenle sistem anında değiştirilebilir.
Örnek 18 . Şekilde gösterilen sistemi analiz edin. 3.19.
Sistem dört diskten oluşur (A C, C E , EF veAH) yani D= 4. Menteşe sayısı W = 3 (tüm menteşeler basittir). Referans sayısı çubuklar İTİBAREN 0 =2+1 ∙ 4=6. Formüle göre sistemin serbestlik derecesi W \u003d 3D - 2Sh - C 0 = 3 ∙ 4-2 ∙ 3-6=0.
Şekil 3.19. Şema örneğin 18
Sistemin değişmezliği için gerekli koşul sağlanmıştır. Yapıyı analiz ediyoruz. Disk AC bir noktada kesişmeyen üç destek çubuğu ile yere bağlanır. Bu ek, diskin hareketsizliğini sağlar AC. ona bağlı İTİBAREN ve bir destek çubuğu ile yere noktadaD disk takılı SE. Bu durumda, çubuğun ekseniD menteşeden geçmiyor İTİBAREN. Pivot tarafından elde edilen değişmez sistemeEF ve noktalarda iki destek çubuğuG ve H bağlı diskAH. Bu üç çubuk bir noktada kesişmez.
Bu nedenle, söz konusu sistem değişmez ve anında değiştirilemez. formüle göre W \u003d 3D - 2Sh - C 0 = 3 ∙2 -2 ∙1 -4=0.
Sonuç olarak, sistem değiştirilemez olmak için gerekli sayıda bağlantıya sahiptir. Yapısını analiz edelim.
Sistem, zeminle birlikte bir menteşe ile birbirine bağlanan üç diskten oluşur. 1-2 ve koşullu menteşelere eşdeğer dört çubuk 1–3 ve 2–3.
Üç diski birbirine bağlayan üç menteşe aynı düz çizgi üzerinde yer aldığından sistem anında değiştirilebilir.
Örnek 20. Menteşeli çubuk sistemlerinin kinematik analizini yapın (Şekil 3.21, bir, b).
a)
 b)
b)
Şekil 3.21. Şema örneğin 20
a) müstakil çiftlik, nerede İTİBAREN = 9, saat = 6, 9 = 2 ∙ 6 - 3, iç - I ve dış - II diskleri üç çubukla bağlandığından geometrik olarak değişmez.
b) bağlı çiftlik, nerede İTİBAREN = 9, saat = 6, İTİBAREN 0 = 3, 9 + 3 = 2 ∙ 6 geometrik olarak değişmezdir, çünkü I ve II diskleri üç çubukla birbirine bağlıdır.
Örnek 21. Çubuk sistemlerinin kinematik analizini yapın (Şekil 3.22, bir B C).
a) bağlı olmayan menteşe çubuğu sistemi, burada İTİBAREN = 11, saat = 7, 11 = 2 ∙ 7 - 3 geometrik olarak değişmez. Üç menteşeli bir kemer yöntemiyle, yani bir gerçek (1, 2) ve bir üzerinde yatmayan iki hayali (2, 3; 1, 3) menteşe ile birbirine bağlanan üç disk I, II, III ile oluşturulmuştur. düz.
b) ekli menteşe çubuğu sistemi, burada İTİBAREN = 6, saat = 5, İTİBAREN 0 = 4, 6 + 4 = 2 ∙ 5 anında geometrik olarak değişkendir. I, II, III disklerini birbirine bağlayan üç menteşe (1, 3; 1, 2; 2, 3) bir düz çizgi üzerinde uzandığından.
c) bağlı birleşik sistem, burada D= 2, W = 1, İTİBAREN 0 = 4, W = 3 ∙ 2 - 2 ∙ 1 – 4 = 0, üç I, II, III diskini birbirine bağlayan bir gerçek (1, 2) ve iki hayali menteşe (1, 3; 2, 3) bir düz çizgi üzerinde uzandığından, anında geometrik olarak değişkendir.
a)  b)
b)  içinde)
içinde) 
Şekil 3.22. Şema örneğin 21
3.3. Sistem değişkenliğinin derecesi
Yersiz sistemler
Yersiz bir sistem için, serbestlik derecesi yerine W karakteristik değişkenlik derecesi tanıtıldı V, formüllerle hesaplanır:
V \u003d 3D - 2Sh - C - 3,(3)
V \u003d 2U - C - 3,(4)
burada gösterimin anlamı formül (1) ve (2)'deki ile aynıdır.
Eğer bir V> 0 ise sistem geometrik olarak değişkendir.
Eğer bir V= 0 ise sistem geometrik olarak değişmez ve statik olarak belirlidir.
Eğer bir V < 0, то система геометрически неизменяемая и статически неопределимая.
Geometrik değişmezlik koşullarıV=0 veV<0 являются необходимыми, но недостаточными. Для окончательного вывода о виде системы необходимо анализировать порядок образования системы (см.примеры ниже).
Örnek 22. Sistemin kinematik analizi (Şekil 3.23).
C Sistemin iki kırık çubuktan oluştuğunu okudukABC,CDE ve dört düz çubukAB, BC, CD,D.E.
menteşeler A ve E - basit, menteşeliBantD - iki katlı, menteşe C - üç katlı.
saat D= 6, W = 9, İTİBAREN= 0 olsun
V= 3 6 - 2 9 - 0 - 3 = 18 - 21 = -3.
Şekil 3.23. Şema örneğin 22
Sistemin oluşum sırasını analiz ediyoruz. AB ve BC bağları, fazlalık olan kırık ABC çubuğu üzerine bindirilir. Benzer şekilde, bağlantılar gereksizdirCD vekırık çubuk için DEC.D.E. İki disk ABC veCDE'ler yalnızca menteşe C ile bağlanır ve kural 2'yi kullanmak için bir bağlantı eksik.
Sonuç olarak, sistem geometrik olarak değişkendir, ancak ayrı parçalarında üç yedekli bağlantı içerir. Sistem, örneğin çubuğun değiştirilmesi gibi bazı bağlantıların konumu değiştirilerek geometrik olarak değişmez hale getirilebilir.çubuk üzerinde M.Ö.B.D.
Örnek 23. Sistemin kinematik analizi (Şekil 3.24).
Çerçevenin iki kapalı konturu vardır ve formül (3), kapalı konturların varlığına izin vermez. Bu nedenle, çerçeveyi dört bölüme ayırıyoruz ve her bölümde üç bağlantıyla birbirine bağlı üç parçaya (disk) ayırıyoruz.
Şekil 3.24. Şema örneğin 23
Sonra alırız D= 3, W = 0,
İTİBAREN= 3∙4 =12ve değişkenlik derecesi
V = 3∙3 –0 – 12 – 3 = –6.
Sistemin oluşum sırasını analiz ediyoruz. Sol disk, orta diske, üçü yedekli altı bağlantı vasıtasıyla bağlanır. Daha sonra sağ disk oluşan diske üçü de fazlalık olan altı bağ yardımıyla tutturulur.
Sonuç olarak, analiz edilen sistem geometrik olarak değişmezdir ve altı yedekli bağlantı içerir.
Mekanizmaların kinematik analizi
giriiş
5. Kinematik diyagramlar
Edebiyat
giriiş
Test çalışmasının teması, "Mekanizmalar ve makineler teorisi" disiplininde "mekanizmaların kinematik analizi" dir.
Çalışmanın amacı: mekanizmaların kinematik analizi bilgisinin oluşumu.
Çalışmanın amaçları: mekanizmaların kinematik analiz yöntemlerine aşinalık.
Konunun ana soruları:
1. Kinematik analizin ana görevleri ve yöntemleri;
2. Mekanizmanın bağlantılarının konumlarının yapımı;
3. Mekanizmanın konumunun işlevi;
4. Hızları ve ivmeleri belirlemek için temel denklemler;
5. Kinematik diyagramlar.
1. Kinematik analizin ana görevleri ve yöntemleri
Mekanizma kinematiğinin ana görevi, bu bağlantılara etki eden kuvvetlerden bağımsız olarak, mekanizma bağlantılarının hareketinin incelenmesidir.
Mekanizmaların kinematik çalışmasında, aşağıdaki ana konular göz önünde bulundurulur:
1) hız planlarının yapımı;
2) mekanizmanın herhangi bir noktasının yörüngesinin yapımı;
3) mekanizmanın herhangi bir noktasının hızlarının ve ivmelerinin belirlenmesi, mekanizmanın herhangi bir bağlantısının açısal hızlarının ve ivmelerinin belirlenmesi, yörüngenin herhangi bir noktasında eğrilik yarıçapının belirlenmesi, vb.
Kinematik araştırma hem grafiksel yöntemler kullanılarak hem de analitik olarak gerçekleştirilebilir. Grafiksel araştırma yöntemleri, mühendislik uygulamaları için yeterli doğruluğu sağlarken, genellikle analitik olanlardan daha basit ve nettir. Bununla birlikte, belirli bir mekanizma türü sistematik olarak derinlemesine araştırıldığında, analitik yöntem daha uygundur.
Çizimdeki grafik yapılarda, sadece bağlantıların uzunluklarını değil, aynı zamanda bireysel noktaların hızlarını ve ivmelerini ve diğer miktarları da göstermek gerekir. Bu koşullar altında, gerçek değerin görüntüye oranı olan ölçek faktörünü kullanmak uygundur:
Ölçek faktörü;
Ölçek faktörü;
Ölçek faktörü
2. Mekanizmanın bağlantılarının konumlarının yapımı
Hareket eden bir mekanizmanın halkalarının karşılıklı düzeni her zaman değişir, ancak zamanın herhangi bir anında bağlantıların düzeni oldukça kesindir. Zaman içinde seçilen noktaya karşılık gelen bağlantıların göreli konumunun grafik temsiline mekanizmanın planı denir. Mekanizmanın birbirini takip eden anları için oluşturulan bir dizi ardışık plan, pozisyon planı olarak adlandırılır ve mekanizmanın hareketini görsel olarak takip etmenizi sağlar.
Bir mekanizma konum planının inşası, konumu belirli bir an için ayarlanmış olan bu bağlantının görüntüsü ile başlar.
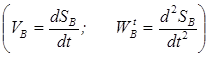
Krank kaydırma mekanizması
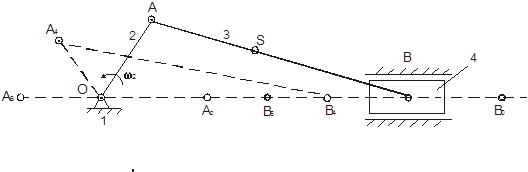
O merkezinden - krank OA'nın yarıçaplı dönme ekseni ve kaydırıcının hareketinin X - X ekseni üzerinde B 0 - sağ B 6 - sol aşırı kaydırıcı B olarak işaretliyoruz. Doğrudan OA 0 B 0 ve OA 6 B 6 - B 0 ve B 6 sürgülerinin uç konumlarına karşılık gelen mekanizmanın konumları. Krank A parmağının yörüngesini A 0 noktasından 12 eşit parçaya böleriz ve elde edilen A 1, A 2, A 3 ... A 11 noktalarından AB == ... B konumlarını işaretleriz 1, B 2, B 3 ... B 11 satırındaki kaydırıcının B 0 V 6 . A 1 , A 2 , A 3 ... A 11 noktalarını O merkezi ve karşılık gelen B 1 , B 2 , B 3 ... B 11 noktalarıyla birleştirerek mekanizmanın planlarını elde ederiz. Biyel kolunun S 0 , S 1 , S 2 ... S 11 merkezlerini çeşitli konumlarında seri olarak bağlayan bir eğri, bir biyel kolu eğrisi olacaktır.
3. Makine konumu işlevi
Mekanizmanın konum fonksiyonu, çıkış bağlantısının koordinatının mekanizmanın genelleştirilmiş koordinatlarına bağımlılığıdır.
Mekanizmanın bağlantılarının ve noktalarının yer değiştirmeleri, hızları ve ivmeleri, mekanizmanın bağlantılarının yer değiştirmelerinin, hızlarının ve ivmelerinin öncü olarak alınan fonksiyonlarıdır. Mekanizmanın önde gelen bağlantılarının sayısı, mekanizmanın serbestlik derecesi sayısına veya aynı olan mekanizmanın genelleştirilmiş koordinatlarının sayısına eşit olmalıdır.
Önde gelen bağlantıların yasalarının hangi biçimde verilebileceğini düşünelim. Bu yasalara yer değiştirmelerin, hızların ve ivmelerin fonksiyonları denir.
Yer değiştirme fonksiyonu, ana bağlantının yer değiştirmesini zamanla ilişkilendiren uygun bir fonksiyon olarak analitik biçimde belirtilebilir (Şekil 2).
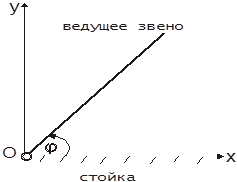
Öndeki bağlantı, rafla birlikte dönme çiftine dahil edilirse, φ=φ (t) işlevi ayarlanır, burada: φ, rafla ilişkili sabit XOY koordinat sistemine göre önde gelen bağlantının dönme açısıdır, ve t zamandır.
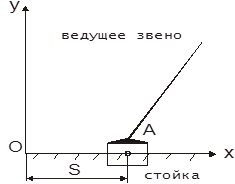
Öndeki bağlantı öteleme çiftine dahil edilirse, s=s (t) işlevi ayarlanır, burada s, rafla bağlantılı sabit koordinat sistemine göre önde gelen bağlantının keyfi olarak seçilen bir A noktasının yer değiştirmesidir ve t zamanı.
φ=φ (t) ve s=s (t) işlevleri, aynı zamanda, ordinat eksenlerinin bazı seçili ölçeklerde ve 'de dönme açılarını φ veya yer değiştirmeyi temsil ettiği ve apsis eksenlerinin gösterildiği eğriler biçiminde grafiksel olarak belirtilebilir. seçilen ölçekte t zamanı (Şekil 3).
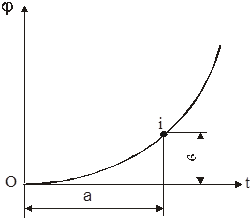
φ 0 = 0; φ ben - φ 0 = · içinde;
Buna göre, ön bağlantının φ i açısı boyunca döndüğü t i süresi şuna eşittir:
t ben - t 0 = · a ;
Önde gelen bağlantının hareket yasası, hız fonksiyonları ω=ω (t) veya v=v (t) şeklinde verilirse, hız fonksiyonlarından yer değiştirme fonksiyonlarına geçiş, integraller hesaplanarak gerçekleştirilebilir:
kinematik analiz mekanizması ivmesi
 ve
ve  ;
;
burada: φ 0 , s 0 , t 0 - önde gelen bağlantının ilk konumuna karşılık gelen açı, yer değiştirme ve zaman.
Önde gelen bağlantının hareket yasası, ivme fonksiyonları ε=ε (t) ve ω=ω (t) şeklinde verilirse, o zaman integraller hesaplanarak hız fonksiyonlarına geçiş gerçekleştirilir:
 ve
ve 
burada: ω 0 , v 0 , t 0 - önde gelen bağlantının ilk konumuna karşılık gelen açısal hız, doğrusal hız ve zaman.
4. Hızları ve ivmeleri belirlemek için temel denklemler
Bir kinematik çiftin bağlantılarının ortak noktalarının hızları ve ivmeleri arasındaki bağlantı, çifte bağlıdır.
Hızlar ve ivmeler için vektör denklemlerinin derlendiği iki durumu ele alalım:
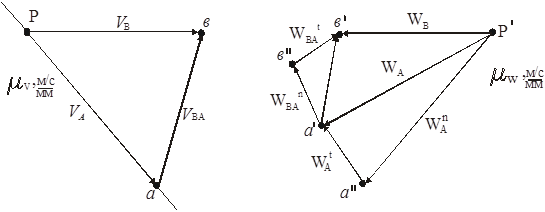
a) iki nokta aynı bağlantıya aittir ve birbirinden bir mesafe ile ayrılmıştır. ben (Şekil 4).
Teorik mekanikten, kesinlikle katı bir cismin herhangi bir noktasının hızının, öteleme ve bağıl hareketlerin hızlarının geometrik bir toplamı olarak temsil edilebileceği bilinmektedir.
Söz konusu bağlantı için öteleme hareketi, A noktasının hızındaki öteleme hareketidir ve bağıl hareket, bağlantının A noktası etrafındaki dönme hareketidir. B noktasının hızı için vektör denklemi:
![]() ;
;
Bağlantı A noktası etrafında döndüğünde, B noktası bir daire içinde hareket eder. ββ A noktasından tanımlanmıştır. Bu nedenle, hız V BA yaya teğettir ββ , yani AB doğrusuna dik.
V BA =ω·AB veya V BA =ω· hızının değeri.
Karşı V BA yönünü ω ve tersini bulabilirsiniz.
Çünkü taşınabilir hareket öteleme olarak seçilirse, B noktasının ivmesi 2 ivmeden oluşabilir: A noktasının ivmesi ve bağlantının A noktası etrafında dönüşü sırasında B noktasının ivmesi.
![]()
B noktası bir daire boyunca hareket ettiğinde ββ ivme W BA 2 ivmeden oluşur: normal, dönme merkezine doğru yönlendirilir ve teğetsel, yaya teğet olarak yönlendirilir ββ , yani AB doğrusuna dik. B noktası ivmesi için vektör denklemi:
![]() ;
;
İvmelerin değerleri ve formüllerle belirlenir:
= ω 2 =  ;
;
burada: ε - açısal ivme;
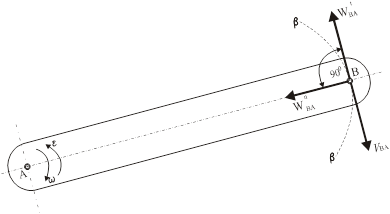
b) iki nokta, bir öteleme çifti oluşturan ve belirli bir zamanda çakışan iki bağlantıya aittir (Şekil 5).
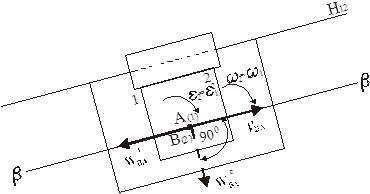
A noktası 1 bağlantısına, B noktası 2 bağlantısına aittir. Zamanın bu noktasında A ve B noktaları çakışır (B noktası A noktasının üzerindedir). Bağlantı 1 ve 2, kılavuz H 12 ile bir öteleme çifti oluşturur.
B noktasının hızı 2 hızdan oluşur - taşınabilir ve göreceli. Buradaki taşınabilir hareket, bağlantı 1'in hareketidir, dolayısıyla A noktasının hızı V A taşınabilir olacaktır. B noktasının bağıl hızı, bağlantı 2'nin bağlantı 1'e göre hareket hızına eşittir. Bağlantı 2, bağlantı 1'e göre hareket ettiğinde, B noktası düz bir çizgide hareket eder. ββ , kılavuz H 12'ye paralel . Yani bağıl hız V VA, H 12'ye paraleldir.
B noktasının ivmesi, öteleme hareketi ötelemeli olmadığında, 3 ivmenin toplamıdır: taşınabilir, yani. A noktasının ivmesi, bağıl ve döner veya Coriolis. Göreceli harekette, B noktası doğru boyunca hareket eder. ββ , bu nedenle, bu harekette, B noktası sadece bu hat boyunca yönlendirilmiş teğetsel ivmeye sahiptir, yani. kılavuz H 12'ye paralel. Bu ivmeyi olarak gösterelim. Dönme (Coriolis) ivmesi ile gösterilecektir.
B noktasının hızı ve ivmesi için vektör denklemleri şöyle görünecektir:
1 ve 2 bağlantıları bir öteleme çifti oluşturduğundan, göreli rotasyonları yoktur. Bu nedenle, bu bağlantılar aynı açısal hızlara ve açısal ivmelere sahiptir, yani: ω 2 =ω 1 ve ε 2 =ε 1, burada ω 1, öteleme hareketinin açısal hızıdır (bağlantı 1'in dönüşü).
Vektör, açısal hız ω 1 yönünde 90 0 döndürülürse, vektörün yönlendirileceği yöne yönlendirilir. Değeri aşağıdaki formülle belirlenir:
Krank-kaydırıcı mekanizmasının sürgüsünün hızını ve ivmesini belirleyelim.
Mekanizmanın planı verilmiştir, boyutlar ℓ OA, ℓ AB, ω 2 , ε 2 .
4 uzvunun (B noktaları) hız ve ivmesini ve 3 uzvunun (biyel kolu) açısal hız ve ivmesini bulun.
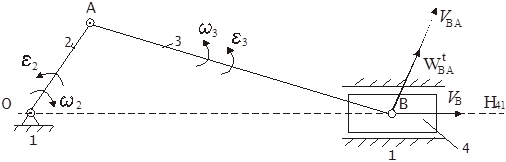
ω 2'yi bilerek, VA \u003d ℓ OA · ω 2'yi buluyoruz. Hız VA hız planını "P" segmenti şeklinde tasvir edin a", OA'ya dik (Şekil 7). Piston (bağlantı 4) ileriye doğru hareket eder, böylece tüm noktaları B noktası ile aynı hıza ve aynı ivmeye sahiptir.
Şekil.7 Şekil.8
Bununla birlikte, B noktası sadece 4 bağlantısına değil, 3 bağlantısına da aittir. Aynı şekilde A noktası 2 ve 3 numaralı bağlantıların ortak noktasıdır. Böylece, 3 numaralı bağlantıda birbirinden ayrılmış iki A ve B noktası vardır. diğer mesafe ℓ AB. Bu nedenle, B noktasının hızı:
![]() nerede: ║
nerede: ║ ![]() ;
;
Bu denkleme göre bir hız planı oluşturuyoruz. Bir noktadan geçmek a AB'ye dik bir çizgi ve P noktasından geçen bir çizgi - H 41'e dik bir çizgi. Kavşak noktasında koymak içinde. Segment P içinde B noktasının hızını ve segmenti temsil eder aw- B noktasının A'ya göre hızı ( V VA). Bağlantı 3'ün açısal hızı şu formülle bulunur:
Vektörü B noktasına hareket ettirerek, ω 3 yönünü (saat yönünün tersine) buluruz.
Hızlanma noktası A:
Kutuptan (Şekil 8) ivmeyi erteleyerek ve segmentler şeklinde ve , A noktasının (segment ) toplam ivmesini buluyoruz.
B Noktası Hızlanma:
![]()
nerede: ; ║ ve AB;
Hızlanma B noktasından A noktasına yönlendirilir. Noktadan bir kenara koyarak a ' ( hızlanma planında) segmenti a ′ ila ′′, karşılık gelen , noktayı çizmek içinde '' AB'ye dik doğru. R kutbu aracılığıyla ′ H 41'e paralel bir çizgi çizin. Bu çizgiler bir noktada kesişiyor içinde ', segment P ' içinde ' B noktasının (W B) istenen ivmesini temsil eder ve segment '' içinde '- hızlanma. W B ve V B yönlerinin bir karşılaştırmasından, 4. bağlantının şu anda yavaş hareket ettiği sonucuna varıyoruz.
3 bağlantısının açısal ivmesi şu formülle bulunur: .
Vektörün B noktasına aktarılması, ε3'ün ω 3 gibi saat yönünün tersine yönlendirildiğini gösterir.
Denklemlerde, büyüklüğü ve yönü bilinen bir vektörün altı iki çizgi ile, yalnızca yönü ile bilinen bir vektörün altı bir çizgi ile çizilir.
5. Kinematik diyagramlar
Bir kinematik diyagram, incelenen mekanizmanın bir noktasının veya bağlantısının kinematik parametrelerinden birinin (yer değiştirmeler, hızlar ve ivmeler) zamanın, dönme açısının veya bu mekanizmanın önde gelen bağlantısının yer değiştirmesinin bir fonksiyonu olarak grafik bir temsilidir, yani. genelleştirilmiş koordinat fonksiyonunda. Kinematik diyagramlar, mekanizmanın tam bir kinematik özelliğini verir.
Krank-kaydırıcı mekanizmasının kinematik diyagramlarını oluşturuyoruz.
B noktasının yer değiştirmeleri S B , hızları V B ve ivmeleri W B için, doğrusal olarak hareket ettiğinden, bu miktarların zamana bağımlılıkları şeklinde kinematik diyagramlar oluşturmak uygundur veya genelleştirilmiş koordinatφ 2, yani bağımlılıkların grafiksel bir temsilini oluşturun:
S B =SB (t), V B =V B (t), W B =W B (t) veya:
S B \u003d S B (φ 2), V B \u003d V B (φ 2), W B \u003d W B (φ 2)
açı φ 2 dönüş bağlantısı 2 genelleştirilmiş bir koordinat olarak seçilirse.
Biyel kolunun 3 açısal yer değiştirmeleri φ 3, açısal hızları ω 3 ve açısal ivmeleri ε 3 araştırmaya tabiyse, bağımlılıkların grafiksel bir temsili oluşturulabilir:
φ 3 \u003d φ 3 (t), ω 3 \u003d ω 3 (t), ε 3 \u003d ε 3 (t)
φ 3 \u003d φ 3 (φ 2), ω 3 \u003d ω 3 (φ 2), ε 3 \u003d ε 3 (φ 2)
Krank OA sabit bir açısal hız ω 2 ile döner.
5.1 Bir yer değiştirme diyagramı oluşturma
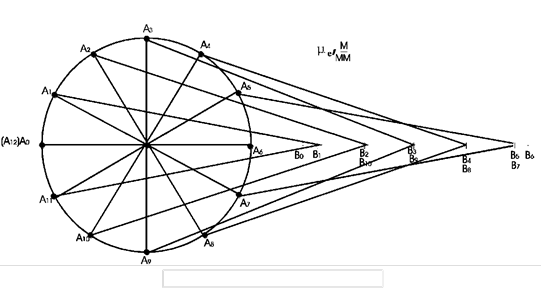
1) Mekanizmanın bir diyagramını, krank OA'nın 30 0 ardışık dönüşlerine karşılık gelen birkaç, örneğin on iki pozisyonda μ e ölçeğinde çiziyoruz (Şekil 9). Krankın ilk konumu için, B kaydırıcısının B 0 aşırı sağ konumunu işgal ettiği OA 0'ı alıyoruz;
2) S B -t koordinat eksenlerini oluşturuyoruz (Şekil 10a) ve krankın bir tam dönüş süresini bir ölçekte gösteren, ℓ segmentini apsis ekseninde mm olarak çiziyoruz: ![]() ; burada: rad/mm, ;
; burada: rad/mm, ;
ℓ parçasını 12 eşit parçaya böleriz ve y ekseni boyunca karşılık gelen 1, 2, 3… noktalarında B noktasından en sağdaki B 0 konumundan geçen S B 1 , S B 2 … mesafelerini çizeriz.
En soldaki B 6 konumuna kadar mesafeler artar ve B 6 konumundan başlayarak azalır; krank A 0 başlangıç konumuna geldiğinde, eğrinin ordinatı (S B -t) sıfıra eşit olacaktır.
3) Elde edilen 0, 1 ΄, 2 ΄, 3 ΄, … noktalarını düz bir çizgi ile seri olarak bağlarız. Ortaya çıkan eğri, B noktasının mesafe diyagramı olacaktır.
Bununla birlikte, krankın φ dönüş açıları apsis ekseni boyunca çizilirse, bu eğri fonksiyonel bir bağımlılığı temsil edecektir:
Hız ve ivme diyagramları, hız ve ivme planları ve grafiksel farklılaşma yöntemleri kullanılarak oluşturulabilir:
 .
.
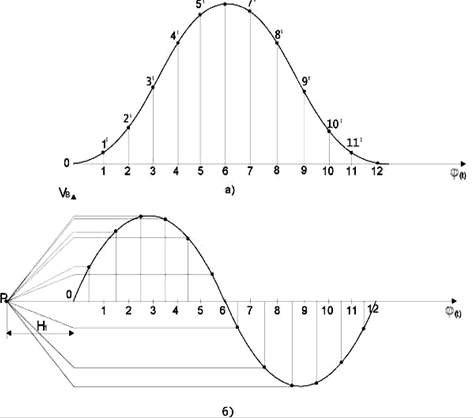
Grafik Farklılaştırma Yöntemi:
1) diyagramın altında (S B -t) O 1 V B, O 1 t (Şekil 2.10b) koordinat eksenlerini oluşturuyoruz ve O 1 t ekseninin devamında sola doğru O 1 P \ segmentini ayırıyoruz u003d H 1 mm (keyfi olarak, böylece diferansiyel eğri, çizim yeri için ayrılan yere yerleştirilir);
2) "P" noktasından, 01΄ bölümlerinde eğrinin kirişlerine (S B -t) paralel P 1, P 2, P 3 ... ışınlarını çizeriz; 12; 2΄3΄….
Bu ışınlar O 1 B ekseninde kesilecek 0 1 1; 0 1 2; 0 1 3…, diyagramın ilgili bölümünde ortalama hız V c ile orantılı;
3) bu bölümleri ilgili bölümlerin ortalama koordinatlarına yerleştirin;
4) elde edilen I, II, III ... noktalarını düzgün bir eğri ile birleştirin; bu eğri hız diyagramı olacaktır (V 0 -t).
Bir hız diyagramına sahip olarak, benzer şekilde bir ivme diyagramı oluştururuz.
Bu yöntemle (V 0 -t) ve (W B -t) diyagramları oluştururken, bu diyagramların x ekseninin uç bölümlerinin yarısına karşılık gelen bölümlerini elde etmek imkansızdır. Grafiği tamamlamak için ek olarak ortalamalar oluşturmanız gerekir. VV ve sonraki döngünün bir veya iki bölümü için.
Şekil 9 Hız konumlarının planı
Şekil 10 Kinematik diyagramlar
Grafik ölçeği öncekiyle aynı kalır.
Ordinat eksenleri boyunca ölçekler aşağıdaki formüllerle belirlenir:
hız tablosu için:  ;
;
hızlanma diyagramı için:  ,
,
Diyagramlama yöntemi basit ve açıktır, ancak aşağıdaki dezavantajlara sahiptir:
1) özellikle büyük eğriliğe sahip eğrileri ayırt ederken yanlışlık;
2) eğrisel hareketi tam olarak keşfedememe, çünkü hız eğrisini farklılaştırarak, sadece teğetsel ivmelerdeki değişim diyagramlarını elde ederiz;
3) diyagramlar, yönü ancak bazı ek yapılardan sonra kurulabilen vektörlerin yalnızca sayısal değerlerini verir.
Hız ve ivme planları yöntemi, belirtilen eksikliklere sahip değildir, bu nedenle çeşitli mekanizmaların incelenmesinde yaygın olarak kullanılmaktadır.
Edebiyat
1. Artobolevski I.I. Mekanizmalar ve makineler teorisi. M, 1975, s. 103-182.
2. Korenyako A.Ş. ve diğerleri Mekanizmalar ve makineler teorisi üzerine ders tasarımı. Kiev, 1970, s. 82-102.
Mekanizmaların kinematik analizi. Kinematik analizin amaç ve hedefleri
Kinematik mekanizma analizi- değişim yasalarını incelemek için ana parametrelerinin incelenmesi ve buna dayanarak, bilinen bir dizi mekanizma arasından en iyi mekanizmanın seçimi. Sentez ile karşılaştırıldığında, mekanizma analizi pratikte yaygın olarak kullanılmaktadır.
Mekanizmanın kinematik analizi, zaman içinde belirli bir an için veya giriş bağlantısının belirli bir konumu için gerçekleştirilir; bazen, mekanizmanın analiz edilen konumu için, bağlantılarından herhangi birinin göreli konumu belirtilir.
Hedefler:
1. Bağlantıların kinematik özelliklerinin belirlenmesi: yer değiştirme; hız; hızlanma; hareket yörüngesi; giriş (önde gelen) bağlantıların bilinen hareket yasalarına sahip konum işlevi.
2. Çalışma (çıkış) bağlantısının kinematik çalışma koşullarının değerlendirilmesi.
3. Mekanizmanın güç, dinamik, enerji ve diğer hesaplamalarını yapmak için gerekli sayısal verilerin belirlenmesi.
İlk veri:
1. Mekanizmanın kinematik diyagramı.
2. Bağlantıların boyutları ve diğer geometrik parametreleri (ancak yalnızca mekanizma hareket ettiğinde değişmeyenler).
3. Giriş bağlantılarının hareket yasaları (veya hareket parametreleri, örneğin, analiz için seçilen mekanizma konumunda giriş bağlantısının açısal hızı ve açısal ivmesi).
L. V. Assur'un sınıflandırmasına tabi mekanizmalar için, kinematik analizin sırası yapı formülü ile belirlenir: ilk önce, ilk mekanizmaların hareket parametreleri bulunur ve daha sonra yapı formülünde göründükleri sırayla yapısal gruplar bulunur. . Burada basit bir kural izlenmelidir: yapı formülünün herhangi bir elemanının kinematiği, ancak bu formülde kendisinden önceki tüm elemanlar için çalışıldıktan sonra incelenebilir.
Görevler:
Mekanizmanın bağlantılarının konumları hakkında. Noktaların hareket yörüngelerinin belirlenmesi;
Bağlantıların hızları veya mekanizmanın tek tek noktaları üzerinde;
Mekanizmanın bağlantılarının veya bireysel noktalarının hızlanması hakkında.
Yöntemler:
Grafik (veya grafik ve çizelge yöntemi);
Grafik analitik (veya hız ve ivme planı yöntemi);
Analitik;
Deneysel.
Grafiksel kinematik analiz yöntemi
Bu yöntemin avantajı netliği ve basitliğidir. Pistonlu hareket gerçekleştiren bağlantıların kinematik analizi için iyidir. Yöntemin dezavantajı, grafik yapıların doğruluğuna bağlı olan düşük doğruluktur.
Konum sorunu Bu, önde gelen bağlantının çeşitli ardışık konumları ile seçilen uzunluk ölçeğinde mekanizmanın birkaç birleşik planının oluşturulmasıyla çözülür.
İncelenen noktanın yer değiştirmelerinin, hızlarının ve ivmelerinin grafikleri (diyagramları) oluşturularak çözülürler.
Kinematik analiz dizisi:
1. İlk olarak, mekanizmanın birkaç (çoğunlukla 12 veya daha fazla) birleşik planı, keyfi olarak seçilen bir uzunluk ölçeğinde inşa edilir.
2. Ardından, incelenen nokta veya bağlantının yolunun (yer değiştirmesinin) bir grafiği oluşturulur, bu amaçla mekanizmanın birleşik planları ve incelenen nokta veya bağlantının ardışık konumları kullanılır.
3. Yer değiştirme grafiğinin grafiksel farklılaşması, incelenen noktanın hızının bir grafiğini oluşturur.
4. Hız grafiğinin grafiksel farklılaşması bir ivme grafiği oluşturur.
Akor yöntemi ve teğet yöntemi ile grafik türevlendirme yapılabilir. Doğruluğu artırmak için her iki yöntemi aynı anda kullanmak uygundur.
örnek 1
Bağlantıların uzunlukları - krank ve bağlantı çubuğu - sırasıyla L OA ve L AB ve krankın açısal hızı olan bir krank-kaydırıcı mekanizması verilmiştir.
Krankın farklı konumlarında kaydırıcının hızını ve ivmesini belirleyin.
Çözüm.
Uzunluk ölçeklerini seçiyoruz , m/mm, burada AO segmentin uzunluğudur, mm, yapım aşamasında olan mekanizma planında L ОА uzunluğunda bir krank tasvir eder; bu uzunluk, mekanizmanın birleşik planlarının çizimin ayrılan yerine yerleştirilmesi gerektiği ve uzunluk ölçeğinin kendisinin daha sonraki hesaplamalar için uygun olacağı gerçeği dikkate alınarak keyfi olarak seçilir.
Mekanizmanın planındaki bağlantı çubuğunu gösteren segmentin uzunluğunu, mm hesaplıyoruz. Mekanizmanın birleşik planlarını oluştururken kullanırlar serif yöntemi(Şekil 3.1).
Hızları ve ivmeleri çizmek için (Şekil 3.1), hu ve h a kutup mesafeleri seçilir, burada hu, keyfi uzunluklardan seçilen hızları çizerken kutup mesafesidir; değerinin h u =30…40 mm aralığında seçilmesi önerilir; h a - ivmeleri çizerken kutup mesafesi; h a \u003d 30 ... 40 mm içinde alınması tavsiye edilir.
Zaman, hız ve ivme ölçekleri, türevi aşağıda verilen formüllerle hesaplanır.
zaman ölçeği formül kullanılarak hesaplanabilir
burada T, krankın bir devrinin periyodudur, s; L X, yer değiştirme grafiğinde (diyagramında) 1 ve 1 noktaları arasındaki segmentin uzunluğu, mm.
T periyodu formüllerle hesaplanabildiğinden
krankın açısal hızı nerede, 1/s; n 1 - krank hızı, rpm, ardından zaman ölçeği
![]() , s/mm.
, s/mm.
Hız ölçeği, incelenen noktanın hızının zamana göre S yer değiştirmesinin türevi olması koşulundan türetilebilir:
![]() .
.
Burada yer değiştirme ölçeğinin ve zaman ölçeğinin sabit olduğu varsayılır.
O zamandan beri ![]() , buradan Konum sorunu bir grafik yöntemle, yani seçilen uzunluk ölçeğinde mekanizmanın birkaç birleşik planını oluşturarak çözülür.
, buradan Konum sorunu bir grafik yöntemle, yani seçilen uzunluk ölçeğinde mekanizmanın birkaç birleşik planını oluşturarak çözülür.
Hızlar ve ivmelerle ilgili sorunlar mekanizmanın bağlantılarının hızları ve ivmeleri için önceden derlenmiş vektör denklemleri temelinde, önde gelen bağlantının belirli (verilen) konumlarında mekanizma bağlantılarının hızları ve ivmeleri için planlar oluşturularak çözülür.
Avantaj Bu yöntemin grafik yöntemine göre daha az zaman alması, hızı ve ivmeyi (büyüklüklerini ve yönünü) tek bir hız planında veya mekanizmanın birçok noktası için hızlanma planında belirlemenize izin verdiği için daha az zaman almasıdır.
dezavantaj Yöntem, mekanizmanın çeşitli konumları için hız ve ivme planları oluşturmanın gerekli olmasıdır (mekanizmanın ve bağlantılarının çeşitli konumlarındaki hız ve ivmeyi belirlemek gerekirse).
Düzlem-paralel hareket yasalarının, hızlar ve ivmeler için planlar oluşturmanın temeli olduğu unutulmamalıdır. Bu yasalara göre:
1. Hız planı (ve hızlanma planı), düzlem-paralel hareketteki noktaların hızlarını (ivmelerini) belirlemek için vektör denklemlerinin grafiksel bir çözümünün bir sonucu olarak elde edilir;
2. Noktaların mutlak hızlarının vektörleri (sabit bir bağlantıya göre hareketlerini göz önünde bulundurarak) planın kutbundan çıkıyor olarak tasvir edilir ve yön, hareket yörüngesine teğetlerle çakışır. Noktaların bağıl hızlarının vektörleri (hareket eden noktalara göre hareket ettiklerinde), karşılık gelen mutlak hız vektörlerinin uçlarını birleştiren segmentlerle temsil edilir;
3. Göreceli hız vektörlerinin uzunluğu, bağıl hareketlerindeki noktaların dönme yarıçapları olan bağlantıların bu bölümlerinin uzunluğu ile orantılıdır. Benzerlik teoremi olarak bilinen bu hüküm, düzlem-paralel ve dönme hareketi bağlantıları üzerinde bulunan birçok noktanın hızlarının belirlenmesini kolaylaştırır.
Üçgenin hız planıdır.
Rijit Bağlantı Hız Planı- hız planının kutbu olarak adlandırılan ortak bir noktadan inşa edilmişlerse, bağlantının herhangi bir noktasının mutlak hız vektörlerinin uçlarının noktalarının yeri.
Hız planı her zaman ölçekli olarak çizilir. "Makineler ve mekanizmalar teorisi" disiplininde ölçeğin bir boyutu vardır, bu nedenle yaygın olarak ölçek faktörü olarak adlandırılır: , .
Hız planı, bağlantının kendisine benzer ve anlık dönüş yönünde doksan derece döndürülür.
Bir rijit bağlantının hız planı, bağlantısına benziyorsa, o zaman bir mekanizmanın hız planı, mekanizmanın kendisine benzemez, çünkü bir rijit bağlantıdan farklı olarak, bir mekanizma değişken bir hareketli sistemdir.
Dişli hız planı- hız planının kutbu olarak adlandırılan ortak bir noktadan oluşturulan bireysel bağlantıların bir dizi hız planı.




 Английский вокруг нас исследовательская работа")
