Hareketlilik derecesinin belirlenmesi. Mekanizmaların yapısal analizi ve sentezi. Assur gruplarının türleri II sınıfı
2 Yapısal Analiz ve mekanizmaların sentezi
2.1 Kinematik zincirin serbestlik derecesi sayısının belirlenmesi
Yukarıda belirtildiği gibi, bir kinematik zincirin bir mekanizmaya dönüştürülmesi için giriş bağlantılarının sayısı, bu kinematik zincirin serbestlik derecesi sayısına eşit olmalıdır.
Bu durumda kinematik zincirin serbestlik derecesi sayısı, hareketli bağlantıların rafa göre serbestlik derecesi sayısı anlamına gelir (bağlantı sabit olarak alınır). Ancak, rafın kendisi gerçek uzayda hareket edebilir.
Eşdeğer Haberleşme Hareketliliği Yetkili Yetkili Yasaklı Yetkili Yetkili Yetkili. Bilyalı mafsal ve kayar mafsal bağlantısının bir dizi kombinasyonu. Notlar: Seri bağlantı bağlamanın avantajı, kırılgan bir temas noktası veya hat tipini teknolojik olarak daha ilginç bir temas yüzeyiyle değiştirme avantajıdır, çünkü bunlar basıncı azaltır ve böylece bağlantı güvenilirliğini artırır. Bununla birlikte, her bir temel bağlantı tarafından hareketliliğe izin veriliyorsa, seri bağlantıda yer alan parçanın dahili hareketliliği meydana gelir.
Örneğin, Dünya üzerindeki herhangi bir hareketsiz cisim sıfır serbestlik derecesine sahiptir, ancak Dünya uzayında, Dünya ile birlikte altı serbestlik derecesinin tamamını kullanarak hareket eder. Başka bir örnek: altında yatan kinematik zincir pistonlu motor, rafa göre bir serbestlik derecesine sahiptir (kart karterine bağlı bir silindirden ve bir araba, motosiklet veya başka bir makinenin çerçevesi veya gövdesinden oluşan sabit bir bağlantı için çalışmada alınan bağlantı), rafın kendisi araba hareket ettiğinde de hareket eder.
Diğer parçaların herhangi bir hareketine neden olmadan döndürme veya öteleme olabilir. Arama ve bağlantı için önceki örneği paralel bağlantılarda kullanma. Böylece, bir seri bağlantıdan farklı olarak, birbirine paralel olarak yerleştirilmiş birkaç temel bağlantı içeren bir bağlantı, iki parça arasındaki hareketlilik miktarını azaltır. Hareketlilik derecelerinin bu şekilde bastırılması, iletilen torsörün belirli bileşenlerinin mevcudiyeti nedeniyle, iki güçlü olan arasında mekanik hareketlerin aktarılması yoluyla gerçekleştirilir: - bu hareketlilik, eksen boyunca ötelemede yasaktır. - anahtar toplam bileşeninin bileşeninin sıfır değeri. - Hareketlilik yasaktır Eksen etrafında dönme, bu eksen boyunca anahtar elemanın zaman bileşeninin sıfır olmayan bir değerinden kaynaklanır.
Bununla birlikte, makinenin hareket edip etmediğine bakılmaksızın, pistonlu motor bağlantılarının rafa göre hareketinin doğası değişmeden kalır.
Aşağıdaki gösterimi tanıtalım:
k, kinematik zincirin bağlantı sayısıdır
p 1 - belirli bir zincirdeki birinci sınıfın kinematik çiftlerinin sayısı
p 2 - ikinci sınıfın çift sayısı
p 3 - üçüncü sınıfın çift sayısı
İlişkili iletilen torsörün bilinmeyenlerinin sayısı eşitse, bir bağlantı izostatiktir. İletilen anahtarın bilinmeyen sayısı aşılırsa referans belirsizdir. Temel ilke tarafından sağlanan denklem sayısı. Uygulamalı Mühendislik Derecesi 11.
Döndürmeye paralel temel bağlantıları kullanarak aşağıda iki seçenek sunar. Bağlantı, eksenin dairesel bir doğrusal bağlantısıdır, bağlantı, dönme ekseninin eksenidir. Çizginin statik bükülmesini belirtir. Bağlantı hiperstatizminin derecesini belirleyin. Kinematik bir çalışmada, paralel ve iki bağlantıya eşdeğer bir torsor tanımlayın. ve hiperstatik bilinmeyenler. iki bağa eşdeğer kinematik bağ ve. böylece iki bağlantıya eşdeğer olan ve izostatik bir pivot bağlantı olan bağlantı, bağlantıda birkaç olası değişiklik sunar ve bağlantı değişmeden kalır.
p 4 - dördüncü sınıfın çift sayısı
p 5, beşinci sınıfın çift sayısıdır.
Uzaya yerleştirilen serbest bağlantıların toplam serbestlik derecesi k sayısı 6k'dır. Bir kinematik zincirde, kinematik çiftlere bağlanırlar (yani, bağlantılar göreli hareketlerinin üzerine bindirilir).
Ek olarak, mekanizma olarak raflı bir kinematik zincir (sabit olarak alınan bir bağlantı) kullanılır. Bu nedenle, kinematik zincirin serbestlik derecesi sayısı şuna eşit olacaktır: toplam sayısı tüm bağlantıların serbestlik derecesi eksi göreli hareketlerine dayatılan kısıtlamalar:
Statik bağları gövde ve var. Bağlantı şeması şöyle görünür: Statik Tork: Statik temel prensibi ile bunu gösterir. Kinematik deformasyon: Kinematik torların bileşim yasasını kullanarak elde ederiz.
Tüm bağlantılar arasında hareket vardır. Hiperstatizm ve Hareketlilik: İlişkiler Yazmak. Eşdeğer bağlantıya bağlı olmayan kinematik bilinmeyenlerin sayısına eşittir. Bir parça, mekanizmanın diğer parçalarının herhangi bir hareketine neden olmayacak bir harekete sahip olabilirse, mekanizmada iç hareketliliğe sahiptir. Dolayısıyla, eşdeğer bir ilişki.
W=6k– ∑ S ben
Sınıf I'in tüm çiftleri tarafından empoze edilen bağların sayısı, sayılarına eşittir, çünkü birinci sınıfın her bir çifti, böyle bir çiftte bağlanan bağlantıların göreli hareketine bir bağlantı uygular; tüm sınıf II çiftleri tarafından empoze edilen bağların sayısı, onların çift sayılarına eşittir (ikinci sınıfın her bir çifti iki bağ uygular), vb.
Α = α2 β = β2 γ = γ1 γ 2 eşdeğeri. Bu üretim kolaylığının kısmen daha karmaşık mekanizma ile dengelendiğine dikkat edin. Karmaşıklık, genellikle, serbestlik derecelerinin sayısını artırmak için ara bileşenlerin seri halinde bağlanmasından kaynaklanır. Birleştirilecek yüzeylerin temas halinde olmasını sağlamak. Bu nedenle, her bağlantının vida teorisi hakkında doğru bir bilgi, hangi bir değerlendirme sağlar.
İzostatik tasarım, parçanın diğerlerine göre tam konumunun ayarlanmasına rehberlik eder. temas yüzeyleri arasında doğru basınç. Örnek: izostatik konumlandırma Kelvin Bu konumda, örneğin taretleri döndürmek, parçalar arasında izostatik ve tam kaplin için kullanılır ve aşağıdaki üç bağlantının paralel bir kombinasyonu kullanılarak gerçekleştirilir:: bağlantı noktası.: Dairesel doğrusal bağlantı, ekseni merkezden geçen eksendir.
Altı serbestlik derecesinin tamamı bağlantıdan alınır, sabit olarak alınır (rafta altı bağ üst üste bindirilir). Böylece:
S 1 \u003d p 1, S 2 \u003d 2p 2, S 3 \u003d 3p 3, S 4 \u003d 4p 4, S 5 \u003d 5p 5, S raf \u003d 6,
ve tüm bağlantıların toplamı
∑ S ben =p 1 +2p 2 +3p 3 +4p 4 +5p 5 +6.
Sonuç, bir uzaysal kinematik zincirin serbestlik derecesi sayısını belirlemek için aşağıdaki formüldür:
Dairesel doğrusal bağlantının ekseni ve bağlantı noktasının temas noktasının oluşturduğu düzlem. Bununla birlikte, belirsiz mekanizma genellikle izostatik mekanizmadan daha katıdır, bu da bir parçanın diğerine göre konumsal doğruluğunda bir faktördür. Oda temasını hem konumlandırmayı hem de sürdürmeyi sağlayanlar.
Destekleri iki kategoriye ayrılır. Paralel bir etütte ilişkilerle gösterildiği gibi, iş parçası ile işlem birimi arasında bu şekilde elde edilen eşdeğer ilişki eş statik ve tamdır. Vidalarla sağlanan teması sürdürmeyi inceleyin.
W=6k–p 1 –2p 2 –3p 3 –4p 4 –5p 5 –6.
Denklemin ilk ve son terimlerini gruplayarak şunu elde ederiz:
W=6(k–1)–p 1 –2p 2 –3p 3 –4p 4 –5p 5 ,
veya nihayet:
W=6n–p 1 –2p 2 –3p 3 –4p 4 –5p 5 ,
burada n, kinematik zincirin hareketli bağlantılarının sayısıdır.
Bu denklem denir yapısal formül genel kinematik zincir.
Formül ilk kez (biraz farklı bir biçimde) P.I. 1887'de Somov ve A.P. 1923'te Malyshev. Bu nedenle, genellikle Somov-Malyshev formülü olarak adlandırılır. Bazı ders kitaplarında buna Malyshev formülü denir - son versiyonun yazarlığından sonra.
Helisel bir mekanik hareket üzerinde hareket etmesine izin verin, bilinen statik bilinmeyen referanslar belirlenebilir. İş parçasının vida aracılığıyla işleme ünitesine bağlanması aşağıdaki iki seri bağlantıyı içerir: nokta bağlantı ekseni, makine mühendisliğinde uygulamalı lisanslar 20. Bu iki seri kanalı birbirine bağlamanın vida eşdeğeri teorisini belirleyin. Bu nedenle, montaj ve iş parçası arasındaki tutma kontak cihazına eşdeğer bağlantı, gevşek bir bağlantıdır.
Bu kontak tutma cihazı, önceden girilmiş olan parça konumlandırma bağlantılarına herhangi bir statik bilinmeyen eklemez. Bu nedenle, parçadan montaja bağlantılarla eşdeğer ilişki her zaman izostatiktir. Genel olarak, iki kişi arasında eşdeğer bir ilişki katılar katı parçacıkların göreceli olarak konumlandırılmasını sağlamayan bir temas tutucu, gevşek bir bağlantı olacaktır. Böyle bir ilişki, iki nispi konumlanma ilişkileriyle halihazırda elde edilen hiperstatizm derecesini arttırmamaya izin verir. katılar.
p 1 - tek hareket eden çiftlerin sayısı (yani, bağıl harekette bir serbestlik derecesi sağlayan kinematik çiftler),
p 2, iki hareketli çiftin sayısıdır, vb.
Yani, bu durumda endeks, bağ sayısını değil, serbestlik derecesi sayısını gösterir ve formülde p 1 ve p 5 ile p 2 ve p 4 atamaları değiştirilir. Bu nedenle, çeşitli ders kitaplarını kullanırken, yazarın yorumunu dikkatlice izlemek gerekir, çünkü ne yazık ki, çoğu zaman farklı yazarlar Aynı atamanın farklı anlamları vardır. Sonuç olarak, aynı gösterimle aynı formüller farklı biçimlere sahiptir.
Sürekli devre kapalı. Bağlantılarla art arda birleştirilen katı gövdelerden oluşan kapalı bir sürekli zincir durumunda, bağ grafiği şöyle görünür: kapalı bir sürekli zincire basit zincir veya döngü de denir. Ayrıca, kapalı bir sürekli zincirin hareketlilik derecesinin m olduğu gösterilmiştir: m = 6n - gs, burada m, kapalı bir sürekli zincirin bağımsız kinematik bilinmeyenlerinin sayısıdır. Bu oran, hareketlilik derecesini bilerek hiperstatizmin derecesini hesaplamamızı sağlar. Kinematik araştırma.
Kapalı bir sürekli zincirin hareketlilik derecesinin, diğerlerini belirlemek için sabitlenmesi gereken bağımsız kinematik bilinmeyenlerin sayısı olduğu da söylenebilir. Çubuğu bir eksantrik ile kontrol etme mekanizmasını düşünün. Bu mekanizmayı izostatik hale getirmek için bir çözüm önerin. Bu üç gövdeyi eklemek için aynı noktada ifade edilmeleri gerekir.
Manipülatörler ve endüstriyel robotlar açık (açık) kinematik zincirler kullanır. Bu tür zincirlerde, hareketli bağlantıların sayısı, toplam kinematik çift sayısına eşittir:
n=p 1 +2p 2 +3p 3 +4p 4 +5p 5 ,
W=6(p 1 +2p 2 +3p 3 +4p 4 +5p 5)–p 1 –2p 2 –3p 3 –4p 4 –5p 5 ,
veya nihayet:
W=5p 1 +4p 2 +3p 3 +2p 4 +p 5 .
Böylece, bir açık kinematik zincirin serbestlik derecesi sayısı, bu zincire dahil edilen kinematik çiftlerin hareketliliklerinin (serbestlik derecelerinin) toplamına eşittir. Serbestlik derecelerine ek olarak, manipülatörlerin ve endüstriyel robotların çalışma kalitesi, manevra kabiliyetlerinden büyük ölçüde etkilenir.
Uygulamalı makine mühendisliği derecesi 25. Not. Bu ilişki, karmaşık bir zincirin hareketlilik derecesini bilerek hiperstatizmin derecesini hesaplamayı mümkün kılar. Hareketli çenenin sürgülü bağlantısı vardır. Makine mühendisliğinde uygulamalı lisans 26. Çıkarım Hiperstatik bilinmeyen mekanizmalar statik bir çalışmadan belirlenir.
Diyelim ki: bu mekanizmadan bağımsız olarak. hiperstatizmin derecesi. Bağlantıların göreli konumunun boyutsal ve açısal koşulları uyuşuyor mu? Bu altı denklem bağımsızdır. Dolayısıyla zincirin hareketlilik derecesi. Makine mühendisliği uygulamalı lisans sahibi 27.
manevra kabiliyeti sabit bir kavrama ile manipülatörün serbestlik derecesi sayısıdır. Manipülatörün (endüstriyel robot) engelleri atlama yeteneğini belirler ve aşağıdaki formülle hesaplanır:
burada M, manipülatörün manevra kabiliyetidir.
Yukarıda belirtildiği gibi, pratikte kullanılan önemli sayıda mekanizma düz mekanizmalardır (yani, düz kinematik zincirlere dayanırlar). Bir düzleme bir kinematik zincir yerleştirmek, bu zincirin tüm halkalarının hareketine üç genel kısıtlama getirir, bu nedenle bir düzleme yerleştirilen k serbest halkanın toplam 3k serbestlik derecesi vardır.
Bu hareketlilik derecesi üç bileşene karşılık gelir. dan hareket. KOMİSYONDAN AVRUPA PARLAMENTOSU, KONSEY, AVRUPA EKONOMİK VE SOSYAL KOMİTESİ VE BÖLGELER KOMİTESİ'NE İLETİŞİM. Avrupa Düşük Emisyon Hareketlilik Stratejisi.
Düşük emisyonlu hareketlilik, Avrupa'nın rekabetçi kalması ve insanların ve malların hareketlilik ihtiyaçlarını karşılaması gereken düşük karbonlu döngüsel ekonomiye genel geçişte önemli bir unsurdur. Avrupa'daki sera gazı emisyonlarının neredeyse dörtte biri ulaşımdan sorumludur; aynı zamanda şehirlerdeki hava kirliliğinin ana nedenidir. Avrupa'nın bu zorluklara tepkisi, düşük karbon hareketliliğine ve hava kirleticilerine doğru geri döndürülemez bir geçiştir. Havadaki sağlığımıza zararlı kirleticilerin emisyonları derhal azaltılmalıdır.
Chebyshev formülüne göre sıfır serbestlik derecesine sahip kinematik zincirin hareketli olduğu ortaya çıkarsa, bu zincirde pasif (aşırı) bağlantılar olduğu anlamına gelir. Bu durumda mekanizmayı incelerken, pasif bağlantılar oluşturan bağlantılar basitçe dikkate alınmaz.
Şekil 4a, elipsograf mekanizmasının kinematik diyagramını göstermektedir (W=3 ⋅ 3 – 2 ⋅ 4 = 1). Aşağıdaki özelliklere sahiptir: A ve B noktaları, kaydırıcı 1 ve 3'e ait olarak X ve Y eksenleri boyunca ötelemeli olarak hareket eder.
Düşük emisyonlu mobiliteye geçiş, küresel olarak şimdiden başladı ve hızlanıyor. Bu büyük fırsatlar sağlar. Bu, Avrupalı otomobil üreticilerinin modernleşmesine, yeni teknolojileri aktif olarak tanıtmasına ve tüketici güvenini geri kazanmasına olanak tanır. Aynı zamanda diğer endüstriler ve üreticiler için küresel standartları koruma ve ürünlerini ihraç etme fırsatıdır. Ayrıca, yenilikçi enerji şirketleri ve hizmet sağlayıcıları ile yatırımcılara sürdürülebilir büyümeyi teşvik etme ve yeni işler yaratma fırsatı sunar.
Bu durumda, M noktası, AM segmentine eşit olan ve Y ekseni boyunca yer alan küçük bir yarı ekseni ve X ekseni boyunca yer alan bir ana yarı ekseni BM (yani, X ekseni boyunca uzanan bir elips) olan bir elips tanımlar; N noktası, Y ekseni boyunca uzanan yarı-küçük ekseni BN ve yarı-büyük ekseni AN olan bir elipsi tanımlar.
C Noktası (AB segmentinin ortası), eşit yarı eksenli bir "elipsi" tanımlar, yani. daire. Bazı 5 bağlantısı, sabit bir O noktasına (koordinatların orijini) ve AB bağlantısı üzerindeki herhangi bir noktaya (örneğin, N noktasına - Şekil 4b) menteşelerle bağlanırsa, sabit bir sistem (kafes) elde ederiz:
Etkin bir iç pazar ve küresel bağlantı için gerekli hareketliliği sağlarken, mevcut düşük emisyonlu hareketlilik stratejisi ile mevcut hızı hızlandırılmalıdır. Bu, geniş bir faaliyet yelpazesi gerektirecektir. Eylem Planı, önerilen tüm önlemlerin gerçeğe dayalı, etkili, verimli, orantılı olmasını ve ikincillik ilkesine tam olarak uymasını sağlamak için mevzuatın iyileştirilmesine yönelik ilke ve süreçlere uygun olarak Komisyonun yapmayı planladığı eylemleri ortaya koymaktadır.
W = 3 ⋅ 4 – 2 ⋅ 6 = 0.
Bununla birlikte, eğer 5 nolu bağlantı, AB bağlantısı için C noktasında ikinci menteşe ile takılırsa (Şekil 4c), o zaman 5 bağlantısına ait C noktasının hareketi ve AB bağlantısına ait C noktasının hareketi koordineli hale gelir - her iki nokta da bağlantı boyunca hareket eder. aynı yörünge ( OC yarıçaplı bir daire boyunca).
Yalnızca bu özel durumda, kinematik zincir hareketli hale gelir (formül böyle bir şeyi "öngöremez". özel durum- ilgili bağlantıların ve kinematik çiftlerin kombinasyonunun genel durumu için sonucu verir). Bu durumda, bağlantı 5 pasif (aşırı) bir bağlantı uygular ve mekanizma incelenirken bu bağlantı göz ardı edilebilir.
Çünkü otomobil taşımacılığı Ulaşımdan kaynaklanan sera gazı emisyonlarının %70'inden ve hava kirliliğinin çoğundan sorumlu olan bu alan, çabaların odaklanacağı bir alandır, ancak tüm ulaşım sektörleri katkıda bulunabilir ve olmalıdır. AB, girişimleri aracılığıyla elverişli bir ortam yaratacak ve düşük emisyonlu hareketlilik için güçlü teşvikler sağlayacaktır. Bu bildirimde açıklanan önlemler, Üye Devletler de dahil olmak üzere, sorumluluklarına uygun olarak katkıda bulunmaları gereken tüm paydaşların uzun vadeli katılımını gerektiren bütünsel bir yaklaşımın parçasıdır.
Pasif bağlantıların varlığı, aynı bağlantı boyutları için sıfır (veya negatif) serbestlik derecesine sahip belirli bir kinematik zincirin yeni bir konumunun oluşturulmasıyla belirlenebilir. Devre başka konumlarda kurulu ise pasif bağlantıları vardır. Boyutlar yeni bir konumda birbirine uymuyorsa, bu gerçekten sabit bir sistemdir - bir kafes kiriş (negatif sayıda serbestlik derecesiyle - kafes kiriş statik olarak belirsizdir).
Avrupa'daki araştırmacılar, imalat ve hizmet sektörleri, yüzyıl ortası hedefiyle yenilik yapmaya ve stratejik seçimlerini yapmaya devam etmelidir. Yeniliklerini Avrupa'da ve dünyada pazara sunmak için doğru zamanda doğru teşviklere ve yatırımlara ihtiyaçları olacak. Bölgeler ve şehirler de zorlukların en iyi hissedildiği düşük emisyonlu mobilite çözümleri bulmada önemli oyuncular olacak ve nihayetinde mobil kullanıcılar için cinsiyet seçimi ne kadar başarılı olduğumuzu belirleyecek.
Sadece teşekkürler kalıcı eylem Avrupa, tüm katılımcıların refahı ve vatandaşlarının refahı için çok önemli olan ulaşım sistemini başarılı bir şekilde dönüştürebilecektir. Düşük Emisyon Hareketliliği için Düzenleyici Çerçeve.
Ekstra serbestlik dereceleri - mekanizma, bu mekanizmanın diğer bağlantılarının hareketini etkilemeyen herhangi bir bağlantının hareketine sahipse, ekstra bir serbestlik derecesi verir.

Genellikle, yuvarlak bir silindirin varlığında ekstra bir serbestlik derecesi oluşur. Kendi ekseni etrafında dönerek kalan bağlantıların hareketinin doğasını değiştirmez.
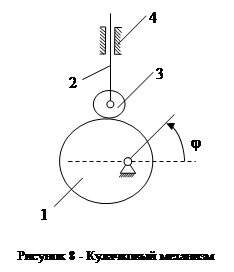
Şekil 5a, dairesel olmayan bir silindire sahip bir mekanizmayı göstermektedir - burada iticinin 2 konumu, yalnızca kamın konumuna değil, aynı zamanda silindirin konumuna da bağlı olacaktır. Yani, mekanizma gerçekten iki serbestlik derecesine sahiptir. Şekil 5b'deki mekanizmada silindir yuvarlaktır ve dönüş açısı iticinin konumunu etkilemez - iticinin konumu tamamen kamın konumu ile belirlenir.
Bu nedenle, aslında, mekanizma bir etkin serbestlik derecesine sahiptir (silindirin kendi ekseni etrafında dönüşü, resmi olarak ikinci serbestlik derecesini verir, ancak bu hareket, mekanizmanın kalan bağlantılarının hareketini etkilemez).
Bir mekanizmayı araştırırken, fazladan bir serbestlik derecesinden kurtulmak uygundur. Bunu yapmak için, pratik profili teorik bir profille değiştirmek gerekir - silindirin merkezinden geçen eşit mesafeli bir profil ve silindiri değerlendirmeden çıkarın (Şekil 5c).
Mekanizmanın hareketlilik derecesinin belirlenmesi
Mekansal bir kinematik zincirin hareketlilik derecesinin belirlenmesi
Kinematik zincirin monte edildiği n tane bağlantımız olsun. Bağlantılar kinematik çiftler halinde bağlı olmasa da, her birinin altı serbestlik derecesi (serbestlik derecesi) vardır. Kinematik bir zincire katılmadan önce tüm bağlantılar bu nedenle 6n serbestlik derecesine sahipti. Bağlantıları bir kinematik zincirde birleştirdikten sonra, farklı sınıflardan (farklı hareketlilik derecelerine sahip) kinematik çiftler elde edeceğiz. Kinematik zincirimizin beş sınıfın hepsinin kinematik çiftlerine sahip olduğunu varsayalım. Aşağıdaki gösterimi kabul ediyoruz:
P 5 - tarafımızdan oluşturulan kinematik zincirdeki beşinci sınıfın kinematik çiftlerinin sayısı,
P 4 - dördüncü sınıfın kinematik çiftlerinin sayısı,
P 3 - üçüncü sınıfın kinematik çiftlerinin sayısı,
P 2 - ikinci sınıfın kinematik çiftlerinin sayısı,
P 1 - birinci sınıfın kinematik çiftlerinin sayısı.
Her kinematik çift, bağlantıların hareketini kısıtlar, onlardan sınıfı kadar serbestlik derecesi alır. 5. sınıfın her kinematik çifti, bağlantılardan 5 derecelik serbestlik seçer. Beşinci sınıfın tüm çiftleri 5P 5 serbestlik derecesi, dördüncü sınıf - 4P 4, üçüncü - 3P 3, ikinci - 2P 2, birinci - 1P 1 bağlantılarından alınacaktır. Tüm kayıp serbestlik dereceleri, 6n bağlantılarının toplam serbestlik derecesi sayısından çıkarılırsa, W kinematik zincirinin serbestlik derecesi sayısını elde ederiz:
W \u003d 6n-5P 5 -4P 4 -3P 3 -2P 2 -1P 1. (bir)
Mekanizmanın hareketlilik derecesi rafa rijit bir şekilde bağlı koordinat sistemindeki mekanizma bağlantılarının konumlarını belirlemek için ayarlanması son derece önemli olan bağımsız koordinatların sayısını adlandırmak gelenekseldir.
Mekanizma, tamamen sabitlenmiş bir bağlantıya sahip olması bakımından kinematik zincirden farklıdır. Sabit bağlantı altı serbestlik derecesinin tamamını kaybetti. Bu nedenle mekanizmadaki hareketli halka sayısı n-1'dir. n-1 hareketli bağlantıların sayısını formül (1) ile değiştirerek, mekanizmanın hareketlilik derecesini belirlemek için bir formül elde ederiz:
W=6(n-1)-5P 5 -4P 4 -3P 3 -2P 2 -1P 1 . (2)
Formül (2) ilk olarak Malyshev tarafından uzamsal mekanizmalar için elde edildi.
Düz mekanizmaların hareketlilik derecesini belirlemek için Malyshev formülünü düşünün. Düz bir mekanizmanın tüm bağlantıları üç serbestlik derecesine sahip olabilir ve kinematik çiftler sırasıyla 1 veya 2 serbestlik derecesine sahip olabilir. Düzlemsel kinematik çiftler sınıflar tarafından ele alınırsa, bunlar yalnızca beşinci ve dördüncü sınıflardandır. Aynı zamanda, düz mekanizmanın tüm bağlantılarının toplam serbestlik derecesi sayısının 3(n-1) olduğunu dikkate almak son derece önemlidir. Beşinci sınıfın çiftleri, dördüncü - bir olmak üzere iki derece hareketlilik kaybeder. Bu nedenle, düz mekanizmanın hareketlilik derecesi aşağıdaki formülle belirlenmelidir:
W=3(n-1)-2P 5-P4. (3)
Düz bir mekanizmanın hareketlilik derecesini belirlemek için formül (3) ilk önce P. L. Chebyshev tarafından elde edildi.
Mekanizmaya dayatılan genel ilişki koşullarının sayısının bağımlılığı dikkate alınarak, mekanizmalar ailelere ayrılır.
Mekanizma aileleri ve yapısal formülleri Tablo 1'de gösterilmiştir.
Tablo 2.1 Çeşitli mekanizma ailelerinin yapısal formülleri

P. L. Chebyshev'in yapısal formülünün belirli bir örnek üzerinde uygulanmasını düşünün. Şekil 5, eklemli bir dört-bağlantıyı göstermektedir.
1e- bağlantı- krank- taahhütler döner hareket O ekseni etrafında ( tam dönüş);
2e- AB bağlantısı - biyel - düzlem-paralel hareket yapar;
3e- BC bağlantısı - külbütör (veya dengeleyici) - C ekseni etrafında ileri geri bir dönme hareketi gerçekleştirir ( eksik ciro);
4e- OS bağlantısı - raf (yatak) - sabit bağlantı.
Bağlantı sayısı n=4. Kinematik çiftler: 4-1, 1-2, 2-3, 3-4. 4 tek hareketli çiftimiz var 5 inci sınıf. Tüm bağlantıların bağıl hareketi düzdür. Mekanizma düzdür. Hareketlilik derecesini Chebyshev P. L. formülüne göre belirliyoruz:
W=3(n-1)-2P 5 -P 4 =3(4-1)-2×4-0=1.
Mekanizmanın hareketlilik derecesi 1'e eşittir. Bu, çerçeveye rijit bir şekilde bağlı olan koordinat sistemindeki mekanizmanın herhangi bir bağlantısına bir koordinat koymanın, diğer tüm bağlantıların konumlarını belirlemek için yeterli olduğu anlamına gelir. Örneğin, bizim durumumuzda, krank j 1 'in dönüş açısını ayarlamak yeterlidir.
 Pasif Linkler ve Fazla Linkler
Pasif Linkler ve Fazla Linkler
Bağlantılar ve kinematik çiftler, mekanizmanın hareketinin doğasını bir bütün olarak etkilemeyen, denir yedekli (ekstra) bağlantılar ve çiftler, ve bunlar tarafından koşullandırılan bağlara pasif bağlar denir.
Mekanizmanın hareketlilik derecesi belirlenirken, gereksiz bağlantılar ve kinematik çiftler dikkate alınmamalıdır.
Karmaşık çubuk mekanizmalarında, hareketlilik derecesini gözle belirlemek her zaman mümkün değildir. Bu durumlarda Chebyshev formülünü kullanmak son derece önemlidir.
 Çift paralelkenar mekanizmasının W'sini tanımlayalım (Şekil 6). Burada AB=BC=KM=MN; BİR || BM || CK; AN=BM=CK ve AC || K.N. Bu tür bir bağlantı oranıyla, mekanizma W=1'e sahiptir, yani diğer tüm bağlantıların konumlarını belirlemek için bağlantı 1'in konumunu j 1 açısıyla ayarlamak yeterlidir. Bağlantı 1'i herhangi bir pozisyonda sabitlerseniz, kalan bağlantılar hareketsiz olacaktır. W'yi Chebyshev formülüyle tanımlarız. Bağlantı sayısı - n=5, kinematik çiftler 5 inciР 5 =6 sınıfı, dördüncü sınıfın kinematik çiftlerinin sayısı - Р 4 =0.
Çift paralelkenar mekanizmasının W'sini tanımlayalım (Şekil 6). Burada AB=BC=KM=MN; BİR || BM || CK; AN=BM=CK ve AC || K.N. Bu tür bir bağlantı oranıyla, mekanizma W=1'e sahiptir, yani diğer tüm bağlantıların konumlarını belirlemek için bağlantı 1'in konumunu j 1 açısıyla ayarlamak yeterlidir. Bağlantı 1'i herhangi bir pozisyonda sabitlerseniz, kalan bağlantılar hareketsiz olacaktır. W'yi Chebyshev formülüyle tanımlarız. Bağlantı sayısı - n=5, kinematik çiftler 5 inciР 5 =6 sınıfı, dördüncü sınıfın kinematik çiftlerinin sayısı - Р 4 =0.
W=3(n-1)-2P 5 -P 4 =3(5-1)-2×6-0=0.
W=0 ise, bir mekanizma değil, katı bir çiftlik olmalıdır. Mekanizmanın hareketi gerçekleştirebildiğini görüyoruz. durumunda ise bu mekanizma bağlantı 5'i (veya 2) zihinsel olarak kaldırın, ardından kalan bağlantıların hareketinin doğası değişmeden kalacaktır. Mekanizma, W'sini zaten belirlediğimiz sıradan bir dört bağlantıya dönüşür - W=1. Bağlantı 5 ortadan kaldırıldığında, 2 kinematik çift aynı anda elimine edilir: 5-1, 5-3. Sonuç olarak, bu mekanizmada, bir bağlantı ve iki kinematik çift gereksizdir.
 Başka bir örnek düşünün - genellikle salınan bir konveyör için tahrik olarak kullanılan Marcus mekanizması (Şekil 7). Bağlantı sayısı n=6. Kinematik çiftler: 6-1, 1-2, 2-3, 2-4, 3-4, 3-6, 4-5, 5-6 tüm beşinci sınıf R 5 = 8, R 4 = 0 .
Başka bir örnek düşünün - genellikle salınan bir konveyör için tahrik olarak kullanılan Marcus mekanizması (Şekil 7). Bağlantı sayısı n=6. Kinematik çiftler: 6-1, 1-2, 2-3, 2-4, 3-4, 3-6, 4-5, 5-6 tüm beşinci sınıf R 5 = 8, R 4 = 0 .
W'yi Chebyshev formülüyle tanımlarız:
W=3(n-1)-2P 5 -P 4 =3(6-1)-2×8-0=-1.
Mekanizma şemasına göre çalışacağı ve W=1 olduğu görülmektedir.
2-3 numaralı bağlantıların doğrudan bağlantısı olmasın. 3, 4, 5 bağlantıları, 1, 2, 4 bağlantılarının bu açıda sabitlenmesi gerektiğinden, bağlantı 1'in j 1 dönüş açısına karşılık gelen bir pozisyon almaya devam edecektir. Aynısı, 2-4 veya 4-3 kinematik çifti kaldırıldığında da elde edilebilir. Burada bir kinematik çift gereksizdir. Göz ardı edilebilir. O zamanlar:
W=3(6-1)-2×7=1.
Aynı zamanda, bağlantının ortadan kaldırılmasının bazı kinematik çiftlerin ortadan kaldırılmasını gerektirdiğini not ediyoruz.
ref.rf'de barındırılıyor
Kinematik çiftlerin ortadan kaldırılması (bağlantıların temasının kesilmesi), içerdiği bağlantıların kaçınılmaz olarak ortadan kaldırılmasını gerektirmez.
3 veya daha fazla bağlantının bağlı olduğu bağlantıların bağlantısına genel olarak denir. düğüm. Bir düğümde bağlantılardan daha az bir kinematik çift vardır.
 Aşırı kinematik çiftler ve bağlantılar, mekanizmanın üretiminin doğruluğuna ek koşullar getirir, ancak buna rağmen, herhangi bir ek gerekli nitelikleri elde etmek için bazen mekanizmaya pasif bir bağlantı veya ekstra bir bağlantı eklenir; mukavemette artış, sürtünmede azalma vb.
Aşırı kinematik çiftler ve bağlantılar, mekanizmanın üretiminin doğruluğuna ek koşullar getirir, ancak buna rağmen, herhangi bir ek gerekli nitelikleri elde etmek için bazen mekanizmaya pasif bir bağlantı veya ekstra bir bağlantı eklenir; mukavemette artış, sürtünmede azalma vb.
Şekil 2.8'de gösterilen kam mekanizmasının W'sini belirleyelim. Burada bağlantılar 1 - kam, 2 - itici, 3 - silindir, 4 - raftır. Bağlantı sayısı n=4. Beşinci sınıfın kinematik çiftleri 1-4, 2-4, 2-3 ve 3-1 - en yüksek düz kinematik çift 4 inci sınıf.
Kam j açısıyla döndürüldüğünde, itici belirli bir pozisyon alacaktır. İlk bakışta W=1. W'yi Chebyshev formülüyle tanımlarız:
W=3(4-1)-2×3-2=2.
Burada ekstra bir hareketlilik derecesi var. Silindir bir itici ile sabitlenmişse, mekanizmanın W'si bire eşit olacaktır. Baklaların geri kalanına göre silindirin dönmesinin bir etkisi yoktur. Silindirin dönüş açısı, mekanizmanın ekstra serbestlik derecesidir.
Ekstra bir özgürlük derecesi Bazı bağlantıların hareketinde böyle bir serbestlik derecesi olarak adlandırmak gelenekseldir; bunun ortadan kaldırılması, kinematik hususlar için diğer bağlantıların hareketinin doğasında değişikliklere neden olmaz.
Bu, bağlantının mutlak veya göreli hareketini ifade eder. Fazladan bir serbestlik derecesinin ortadan kaldırılması, bağlantının ortadan kaldırılmasını gerektirmez.
Chebyshev formülünü kullanmadan önce, pasif kısıtlamaları ve ekstra serbestlik derecelerini zihinsel olarak dışlamak son derece önemlidir.
Chebyshev formülü genellikle doğru cevabı verir. Genel durumlarda, pasif bağlantılar ve ekstra serbestlik dereceleri yoktur ve sadece özel durumlarda mevcuttur.
Örneğin: çift paralelkenar mekanizması, bağlantılar paralel olmadığında aynı mekanizmanın özel bir durumudur (Şekil 9a); Marcus mekanizması, bağlantı 2, 4'ün döner mafsallarının eksenleri çakışmadığında mekanizmanın özel bir durumudur (Şekil 9b); yuvarlak bir silindir, bir silindirin geometrik şeklinin daha özel bir durumudur yuvarlak biçimde(Şekil 9c).
Böylece, Chebyshev formülü tanımlamayı mümkün kılar. özellikler(özellikle) mekanizmalar.
Mekanizmanın hareketlilik derecesinin belirlenmesi - kavram ve türleri. "Mekanizmanın hareketlilik derecesinin belirlenmesi" kategorisinin sınıflandırılması ve özellikleri 2014, 2015.





