Kinematik çift türleri. Diğer sözlüklerde "Kinematik çift" in ne olduğunu görün
Bir kinematik çift, onlara belirli bir göreli hareket sağlayan iki bitişik bağlantının hareketli bir bağlantısıdır. Kinematik bir çiftin öğeleri, iki bağlantının hareketli bir bağlantısının meydana geldiği ve bir kinematik Çift oluşturan bir dizi çizgi veya nokta yüzeyidir. Bir çiftin var olması için, onu oluşturan bağların elemanları sürekli T temasında olmalıdır.
Böyle bir eklemin bir örneği kalça eklemidir. Ayrıca iki serbestlik dereceli veya bir serbestlik dereceli eklemler de vardır. Hareketliliklerinden dolayı zincirler ayrılır: sert, normal ve gevşek. sert zincirdir özel bir durumİsmin kendisi bir tür oksimoron. Hareket etmeyen bir kinematik zincirle uğraşmalıyız! Yapı yapılarında kullanılır ve mekanikte ilgi konusu değildir. En yaygın olarak kullanılan kinematik zincir düz zincirdir.
Böyle bir zincirde, bir elemanın hareketi, sistemin diğer tüm elemanlarının hareketini etkiler. Daha sonra serbest zincir uygulanır. Serbest zincire bir örnek, bir veya daha fazla tekerleğin sabit bir dönüş eksenine sahip olmadığı dişlilerden oluşan bir dişli kutusu olan bir dişli kutusudur.
Çalışmaları sosyal ağlarda paylaşın
Bu çalışma size uymuyorsa sayfanın alt kısmında benzer çalışmaların listesi bulunmaktadır. Arama butonunu da kullanabilirsiniz
2. ders
Makinenin mekanizması ne olursa olsun, her zaman sadece bağlantılardan ve kinematik çiftlerden oluşur.
Hareketli bağlantılar üzerindeki mekanizmalarda uygulanan bağlantı koşulları, makineler ve mekanizmalar teorisinde Kinematik çiftleri çağırmak gelenekseldir.
Şu anda, kinematik zincirler birçok şeyi tanımlamak için kullanılmaktadır. karmaşık sistemler hareket. Bu özellikle robotik için geçerlidir. Örneğin bir manipülatörün, yani bir robotun insan elinin bazı fonksiyonlarını yerine getirebilen bir parçasının hareketi, robotta şeklinde ifade edilen elemanlar ve bunlar arasındaki hareketli bağlantılardan oluşan kinematik bir zincir olarak tanımlanır. konektörler veya menteşeler. Ancak kinematik zincir kavramı, insan vücudunun hareketini tanımlamada da kullanılır. Kinematik zincir burada, bir hareket sistemini oluşturan birbirini takip eden birkaç eklemin birleşimi olarak tanımlanır.
kinematik çiftiki bitişik bağlantının hareketli bağlantısı olarak adlandırılır ve onlara belirli bir göreli hareket sağlar.
Masada. 2.1, pratikte en yaygın kinematik çiftlerin isimlerini, çizimlerini, sembollerini ve bunların sınıflandırılmasını gösterir.
Bağlantılar, kinematik bir çift halinde birleştirildiğinde yüzeyler, çizgiler ve noktalar boyunca birbirleriyle temas edebilir.
Genellikle bu normal, basit bir zincirdir. Burada görüldüğü gibi havuzlar kinematik çiftlerdir ve kemikler zincirin sabit elemanlarıdır. İnsan biyomekaniği ayrıca kinematik zincirlerin açık ve kapalı zincirler olarak bölünmesini de tanıtır. Kapalı bir devrede uç çizgisi serbest değildir. İnsan vücudunda iki kapalı kinematik vardır - göğüs ve pelvis. Öte yandan, bir açık kinematik zincir, son bağlantının serbest olduğu ve yalnızca bir bitişik bağlantıya bağlandığı bir zincirdir.
Uzuvlar tarafından gerçekleştirilen hareketlerin çoğu, uçlarında ateşli bir kol veya bacak bulunduğundan hedeflerin açılmasına izin verir. Öte yandan yapılan çalışmaların çoğu insan vücudu ayrıca topraklama gerektirir. Örneğin bir ipin ayağını çekerken kalça kasları ve ayakların altındaki zemin hattın yer boyunca hareket etmesini sağlayan bir tür kapalı devre olarak düşünülebilir.
Kinematik bir çiftin elemanlarıiki bağlantının hareketli bir bağlantısının meydana geldiği ve bir kinematik Çift oluşturan bir dizi Yüzeyler, çizgiler veya noktalar olarak adlandırırlar. Kinematik çiftlerin elemanlarının temas tipine bağlı olarak, daha yüksek ve daha düşük kinematik çiftler.
Kinematik çiftler Bir çizgi veya nokta şeklindeki elemanların oluşturduğu, denir daha yüksek .
Biyokinetik çift, sert katı elemanlar ve eklemler oluşturur. Serbestlik derecesine eklemdeki bağımsız hareket denir ve serbestlik derecesi sayısına rijit cismin toplam bağımsız bağıl hareket sayısı denir. Ekli gövde 6 serbestlik derecesine sahiptir: 3 eksen etrafında 3 dönme hareketi ve bunlar boyunca 3 aşamalı hareket gerçekleştirebilir. 5 dereceden fazla serbestlik derecesine sahip olamaz. Elemanların bağıl hareketi 5 dereceden veya 1-3 mm'den az olduğunda, kombinasyon kinematik bir çift değil bir oyun olarak kabul edilir.
Elementlerin yüzey şeklinde oluşturduğu kinematik çiftlere denir. daha düşük.
Bir çiftin var olması için, onu oluşturan bağların elemanları sürekli temas halinde olmalıdır, yani. kapalı olmak. Kinematik çiftlerin kapanması şu şekilde olabilir:geometrik olarak veya zorla, Örneğin kendi kütlesi yardımıyla yaylar vs..
Kinematik çift sınıfı, arasındaki fark olan bir sayı tanımlar. azami sayı bir elemanın serbestlik derecesi ve belirli bir bileşiğin serbestlik derecesi sayısı. İnsanlarda kemik-eklem sisteminde sadece dönme hareketleri mümkündür. Bu, çekebilen ve itemeyen tek yönlü bir kas hareketinin sonucudur. Küresel ve asetabular eklemler üç serbestlik derecesine sahiptir. Biyokistik zincir, biyokinetik çiftler tarafından birbirine bağlanan tutarlı bir elementler kümesidir. Devre açık veya kapalı olabilir.
Son halka serbest olduğunda açık bir zincirden bahsediyoruz, örneğin bir parmak olabilir. Manipülatörler ve endüstriyel robotlar çoğunlukla açık bir kinematik zincire sahiptir. Bu zincirler, çalışan ucun yani efektörün uzamsal hareketine ve oryantasyonuna izin veren birkaç aktif bağlantıdan oluşur.
Kinematik çiftlerin mukavemeti, aşınma direnci ve dayanıklılığı, tiplerine ve tasarımlarına bağlıdır. Alt çiftler, yüksek olanlardan daha fazla aşınmaya dayanıklıdır. Bu, daha düşük çiftlerde, çiftlerin elemanlarının temasının yüzey boyunca meydana gelmesi ve bu nedenle aynı yük ile yüksek olandan daha düşük spesifik basınçların ortaya çıkmasıyla açıklanır. Aşınma, ceteris paribus, özgül basınçla orantılıdır ve bu nedenle düşük Çiftler, yüksek olanlardan daha yavaş aşınır. Bu nedenle, makinelerdeki aşınmayı azaltmak için, daha düşük çiftlerin kullanılması tercih edilir, ancak genellikle daha yüksek kinematik çiftlerin kullanılması, makinelerin yapısal diyagramlarını önemli ölçüde basitleştirmeyi mümkün kılar, bu da boyutlarını azaltır ve tasarımı basitleştirir. Bu nedenle, kinematik çiftlerin doğru seçimi karmaşık bir mühendislik problemidir.
Serbestlik derecesi sayısı, mekansal düzenlemeyi benzersiz bir şekilde belirlemek için belirtilmesi gereken değişken konumların sayısıdır. Serbestlik derecesi sayısını belirlemek için formülü kullanın. Yukarıdaki formüle dayanarak, birkaç basit manipülatör için serbestlik derecesi sayısı belirlenir.
Denklemi kullanarak, serbestlik derecesi sayısı eşit olarak ayarlanır. Manipülatörün dört serbestlik derecesine sahip olması için, şekil 4'te gösterildiği gibi dört sürücü kullanın. Manipülatörün belirli görevleri gerçekleştirmesi için Şekil 7'de gösterildiği gibi 5 aktüatör kullanın.
Kinematik Çiftler ayrıca şu şekilde bölünür:serbestlik derecesi sayısı(hareketlilik), kendisi aracılığıyla bağlanan bağlantıların kullanımına sunduğu veyabağlantı koşullarının sayısı(çift sınıf), çift tarafından bağlı bağlantıların göreli hareketine dayatılır. Böyle bir sınıflandırmayı kullanırken, makine geliştiricileri, bağlantıların olası göreli hareketleri ve bir çiftin elemanları arasındaki kuvvet faktörlerinin etkileşiminin doğası hakkında bilgi alırlar.
Açık bir kinematik zincirin serbestlik derecesi sayısını gözlemlemek kolay olduğundan, dönen ve kayan beşinci sınıfların kinematik çiftlerinin sayısına eşittir. Babalar dışındaki kinematik çiftlerde şablon buna göre uygulanmalı veya dönen veya kayan topuklu tüm kinematik çiftler değiştirilmelidir.
Bu sorunu çözmenin birkaç yolu vardır: bilyeli mafsalı üç sıfır yer değiştirmeli döner mafsal ile değiştirebilir veya çizim için uygun bir kinematik çifti değiştirebilirsiniz. DOF hesaplamalarından da görebileceğiniz gibi, şekil 6'da gösterildiği gibi ayrı bileşenlere 6 aktüatör uygulanmalıdır.
Genel durumda olan ücretsiz bir bağlantı M - boyutlu uzay, izin veren P en basit hareket türleri, bir dizi serbestlik derecesine sahiptir! ( H) veya W - hareketli.
Bu nedenle, eğer bağlantı üç boyutlu uzaydaysa, altı tür basit harekete izin verir - eksenler etrafında ve boyunca üç dönme ve üç öteleme X, V, Z , o zaman altı serbestlik derecesine sahip olduğunu veya altı genelleştirilmiş koordinatı olduğunu veya altı hareketli olduğunu söyleriz. Bağlantı, üç tür basit harekete izin veren iki boyutlu bir alandaysa - bir dönüş Z ve eksenler boyunca iki öteleme X ve Y , sonra üç serbestlik derecesi veya üç genelleştirilmiş koordinatı olduğunu veya üç hareketli olduğunu söylüyorlar.
Aşağıda, iç gözlem için belirli sayıda serbestlik derecesine sahip manipülatörlerin diyagramları bulunmaktadır. Bir hareket bloğu oluşturmak üzere ilgili kinematik çiftlerin hareketine izin veren, bağlı bir sürücü ile bir kinematik çift oluşturan kinematik bileşenler.
Manipülatörün kinematik bloğu, kinematik mekanizma bağlı sürücüler ile. Manipülasyon makinesinin mekanizması iki kinematik parametre belirler. Hareketlilik - hareketsizleştirilmiş mekanizmanın kinematik zincirinin serbestlik derecesi sayısı - temel; manevra kabiliyeti - sabit bir mekanizmanın kinematik zincirinin serbestlik derecesi sayısı: eleman temeldir ve eleman kinematik zincirdeki son elemandır. Bu parametrelerden ilki, mekanizmayı tamamen hareketsiz hale getirmek için üzerine yerleştirilmesi gereken bağların sayısını gösterir.
Tablo 2.1
Bağlantılar kinematik çiftler kullanılarak birleştirildiğinde, serbestlik derecelerini kaybederler. Bu, kinematik çiftlerin bağlandıkları bağlantılara bir sayı ile dayattığı anlamına gelir. S.
Kinematik bir çiftte birleştirilen bağların bağıl harekette sahip olduğu serbestlik derecelerinin sayısına bağlı olarak, çiftin hareketliliğini belirleyin ( G = H ). H, bağıl hareket halindeki kinematik çiftin bağlantılarının serbestlik derecesi sayısı ise, ile çift hareketliliği şu şekilde belirlenir:
Benzer şekilde, ancak son serbest elemanın ilave hareketsizleştirilmesinden sonra, örneğin kinematik birimin tutacağı veya aleti kesin olarak tanımlanmış bir pozisyonda olduğunda, mekanizmanın hareket serbestliğini belirler. Hareketlilik ve manevra kabiliyeti sayıları gibi sentetik parametrelere ek olarak, bir manipülatörün kinematik biriminin mekanizması, genel geometrik özellikleriyle, yani Şekil 2'de örnek manipülatör için gösterilen sözde kinematik yapı ile tanımlanır.
Kinematik yapı kavramına göre, bir zincir veya mekanizma, üye adları ve kinematik çiftler kullanılarak bir kinematik diyagramın bir taslak şeklinde tanımlanması olarak tanımlanır. Çok sık olarak, manipülatörün yapısı karmaşık olduğunda, kinematik yapıyı Şekil 2'de gösterildiği gibi üç boyutlu uzayda temsil etmek mümkündür. Şekil 11'de gösterilen gösterilen manipülatör için.
nerede P - incelenen çiftin bulunduğu alanın hareketliliği; S - çift tarafından empoze edilen tahvil sayısı.
Unutulmamalıdır ki bir çiftin hareketliliği W (2.1) ile tanımlanan , uygulandığı alanın türüne değil, yalnızca yapıya bağlıdır.
Örneğin, hem altı hem de üç hareketli alanda bir dönme (çeviri) (bkz. Tablo 2.1) çifti hala tek hareketli kalacaktır, ilk durumda üzerine 5 bağ uygulanacaktır ve ikinci durumda - 2 bağ ve sırasıyla sahip olacağız:
Kinematik birimin yapısı, kinematik diyagramın boyutlarının tanımı ve hareket ettiricilerin hareket aralığı ile birlikte, mekanizmanın hareketini ve sonuçta ortaya çıkan kavrama veya aletin hareketini açıkça tanımlar. Operasyonel nedenlerle, bu alan boyutsal çizimden bağımsız olarak ayrıca hacim olarak tanımlanır. Aşağıdaki alanlar çalışma alanında vurgulanmıştır.
Örneğin, Şekil 2'de gösterilen manipülatör yapısı için. 10, ana çalışma alanı Şek. Çalışma ve çarpışma alanları ikiye ayrılır: mekanik ve direksiyon. Mekanik uzaylar, örneğin bağların toplamından, statik ve dinamik deformasyonlardan, vb. kaynaklanan korelasyonlarla kinematik birimin yapısal özelliklerinden türetilir. bu boşluklar genellikle dişlinin geometrisine göre belirlenen nominal boşluklardan daha büyüktür. Kontrol alanları, yer değiştirme ölçüm sistemlerinin özellikleriyle ilgili kontrol limitlerini, işleme kısıtlamalarını ve servo kontrol aralığı limitleri gibi kontrol sisteminin kendisini içerir.
altı hareketli alan için:
üç hareketli alan için:
Gördüğünüz gibi, kinematik çiftlerin hareketliliği, bu sınıflandırmanın bir avantajı olan uzayın özelliklerine bağlı değildir. Aksine, kinematik çiftlerin sık sık sınıflara bölünmesi, bir çiftin sınıfının uzayın özelliklerine bağlı olması gerçeğinden muzdariptir, bu da farklı uzaylardaki aynı çiftin farklı bir sınıfa sahip olduğu anlamına gelir. Bu, pratik amaçlar için elverişsizdir, bu, kinematik çiftlerin böyle bir sınıflandırmasının irrasyonel olduğu anlamına gelir, bu nedenle kullanmamak daha iyidir.
Bu boşluklar genellikle nominalden daha küçüktür. Çalışma alanının hacminin ve geçiş veya çarpışmanın oranı, manipülasyon makinesinin kinematik birimi hakkında verilen kararın doğruluğunu belirler, çözüm daha iyidir, çarpışma alanının çoğu çalışma alanı tarafından işgal edilir. Parametre olarak katsayılar ifadelerle verilir.
İlk manipülatör diyagramlarından bazılarına, bireysel öğeler için bir dizi hareket verildi ve bunların ana detay kalıpları aşağıda gösterilmiştir. Ulaştırma, çeşitli şekillerde mal ve yolcu taşımacılığını kapsayan ekonominin bir dalıdır. Altyapı Ulaştırma tesisleri.
Bir çiftin elemanlarının böyle bir formunu seçmek mümkündür, böylece bir bağımsız temel hareketle ikincisi ortaya çıkar - bağımlı (türev). Böyle bir kinematik çiftin bir örneği bir vidadır (Tablo 2. 1) . Bu çiftte, vidanın (somun) dönme hareketi eksen boyunca öteleme hareketine neden olur. Böyle bir çift, tek hareket eden bir çifte atfedilmelidir, çünkü içinde yalnızca bir bağımsız en basit Hareket gerçekleştirilir.
Kırsal bölgede. Genel kullanım. Aşağı kullanım. Teknik - insan faaliyetinin maddi araçları. İnsanları çalışmaya indirger, küçültür. En cömert olanı üretim tekniğidir. Ulaşım. Spor eğitimi ve kültürü.
Mekanizma, bir veya daha fazla cismin hareketinin diğer cisimlerin uygun hareketine dönüştürüldüğü bir vücut sistemidir. Makine - enerji, malzeme veya bilginin dönüştürülmesi için mekanik bir hareket cihazı. Amaç, bir kişinin fiziksel veya zihinsel çalışmasını kolaylaştırmaktır.
Kinematik bağlantılar.
Tabloda verilen kinematik çiftler. 2.1, basit ve kompakt. Mekanizmalar oluşturmak için gerekli olan neredeyse tüm en basit göreli bağlantı hareketlerini uygularlar. Ancak, makineler ve mekanizmalar oluştururken nadiren kullanılırlar. Bunun nedeni, genellikle bir çift oluşturan bağlantıların temas noktalarında büyük sürtünme kuvvetlerinin ortaya çıkmasıdır. Bu, çiftin elemanlarının önemli ölçüde aşınmasına ve dolayısıyla tahribatına yol açar. Bu nedenle, bir kinematik çiftin en basit iki-bağlantılı kinematik zincirinin yerini genellikle daha uzun kinematik zincirler alır, bunlar birlikte değiştirilmekte olan kinematik çiftle aynı bağıl hareket bağlantılarını uygular.
Tüketimin doğasına göre arabalar ikiye ayrılır. Bir enerji makinesi, herhangi bir türdeki enerjiyi mekanik enerjiye dönüştürmek için kullanılan bir makinedir ve bunun tersi de geçerlidir. Herhangi bir enerji mekanik hale dönüştürülürse, bu tür makineler motordur. Eğer mekanikten herhangi birine - jeneratörler.
Bir iş makinesi, kullanan bir makinedir. mekanik enerji Malzemeleri dönüştürmek için bir motordan veya başka bir enerji kaynağından. İş makineleri ikiye ayrılır: Teknolojik taşıma. Bilgi makineleri - süreç hakkında bilgi. Sibernetik makineler - insan ve doğanın karakteristikleri olan mekanizmaların, fizyolojik ve biyolojik süreçlerin girdilerinin modifikasyonu veya simülasyonu. Yapay zeka unsurları ile karakterizedir.
Kinematik bir çiftin yerini almak üzere tasarlanmış bir kinematik zincire kinematik bağlantı denir..
Pratikte en yaygın olan dönme, öteleme, sarmal, küresel ve düzlem-düzlem kinematik çiftleri için kinematik zincirlere örnekler verelim.
Tablodan. 2.1 Dönme kinematik çiftinin en basit analogunun yuvarlanma elemanlarına sahip bir yatak olduğu görülebilir. Benzer şekilde, makara kılavuzları doğrusal çiftin yerini alır ve bu böyle devam eder.
Aletler - ölçmek için kullanılan cihazlar fiziksel özellikler, kontrol süreçleri, kontrol ve düzenleme otomasyonu. Mekanizmalar, diğerlerinin gerekli hareketi için bir hareketi değiştiren hareketli parçaların bir kombinasyonudur. katılar. Akışkan, harekette bir değişiklikle değiştirildiğinde, bunlar gazın pnömatik olduğu hidrolik mekanizmalardır.
Ana motor motoru içten yanma kayan bir piston çubuğunu dönen bir krank miline çeviren kayar bir volan mekanizmasıdır. Kompresörün en önemli mekanizması, krank milinin dönme hareketini pistonun kayma hareketine dönüştürür.
Kinematik bağlantılar operasyonda daha uygun ve güvenilirdir, çok daha büyük kuvvetlere (momentlere) dayanır ve mekanizmaların bağlantıların yüksek göreli hızlarında çalışmasına izin verir.
Ana mekanizma türleri.
Mekanizma olarak görülebilir özel durum en az bir bağlantının bir rafa dönüştürüldüğü ve kalan bağlantıların hareketinin giriş bağlantılarının belirtilen hareketi tarafından belirlendiği bir kinematik zincir.
Mekanizmayı temsil eden kinematik zincirin ayırt edici özellikleri, bağlantılarının rafa göre hareketinin hareketliliği ve kesinliğidir.
Bir mekanizmanın birden fazla girdisi ve bir çıktı bağlantısı olabilir, bu durumda buna toplama mekanizması denir ve tersine bir girdi ve birkaç çıktı bağlantısı varsa, buna farklılaştırma mekanizması denir.
Mekanizmalar ikiye ayrılırkılavuzlar ve iletim.
iletim mekanizmasıgiriş ve çıkış bağlantılarının hareketleri arasındaki belirli bir işlevsel ilişkiyi yeniden oluşturmak için tasarlanmış bir cihaz olarak adlandırılır.
kılavuz mekanizmaSadece hareketli bağlantılarla kinematik çiftler oluşturan bir bağlantının belirli bir noktasının yörüngesinin belirli bir eğri ile çakıştığı bir mekanizma olarak adlandırırlar.
Teknolojide geniş uygulama alanı bulan ana mekanizma türlerini düşünün.
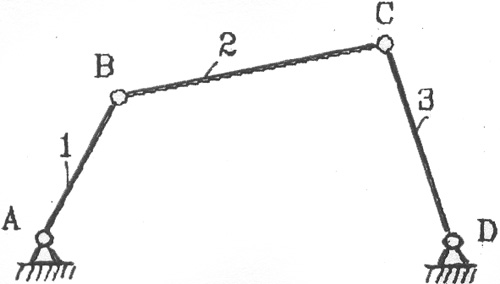
Bağlantıları yalnızca alt kinematik çiftleri oluşturan mekanizmalara denir.mafsallı kol. Bu mekanizmalar, dayanıklı, güvenilir ve kullanımı kolay olmaları nedeniyle yaygın olarak kullanılmaktadır. Bu tür Mekanizmaların ana temsilcisi eklemli dört halkadır (Şekil 2.1).
Mekanizmaların adları genellikle giriş ve çıkış bağlantılarının adlarıyla veya bileşimlerinde yer alan karakteristik bağlantıyla belirlenir.
Giriş ve çıkış bağlantılarının hareket yasalarına bağlı olarak, bu mekanizma krank-rocker, çift krank, çift rocker, rocker-krank olarak adlandırılabilir.
Mafsallı dört bağlantı, takım tezgahı yapımında, alet yapımında ve ayrıca tarım, gıda, kar temizleme makinesi ve diğer makinelerde kullanılır.

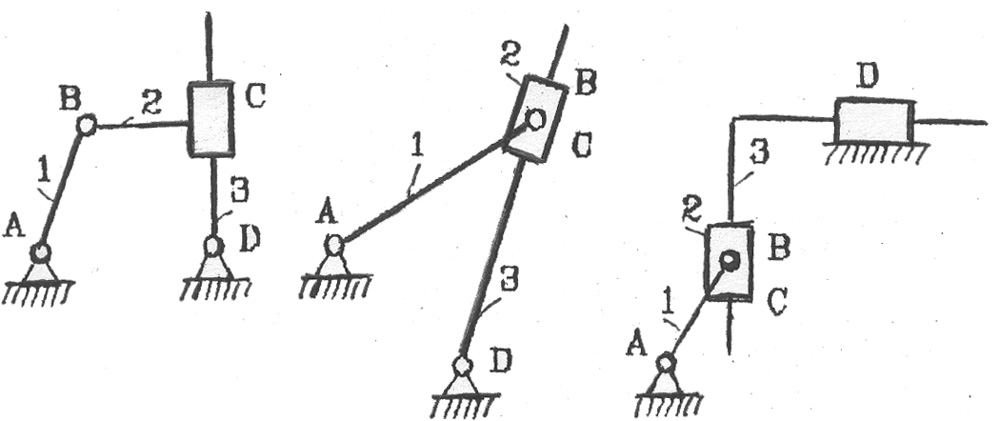
Örneğin, menteşeli bir dört bağlantıda bir dönme çiftini değiştirirsek D , öteleme için, o zaman iyi bilinen krank kaydırma mekanizmasını elde ederiz (Şekil 2.2).
Pirinç. 2.2. Çeşitli krank kaydırıcı mekanizmaları:
1 krank 2 - biyel; 3 - kaydırıcı
Krank-kaydırıcı (kaydırıcı-krank) mekanizması kompresörlerde, pompalarda, içten yanmalı motorlarda ve diğer makinelerde geniş uygulama alanı bulmuştur.
Menteşeli dört bağlantıda bir dönme çiftinin değiştirilmesiİTİBAREN öteleme için bir rocker mekanizması elde ederiz (Şekil 2.3).
p ve c'de .2.3, külbütör mekanizmasında, içindeki dönme çiftlerinin değiştirilmesiyle menteşeli bir dört bağlantıdan elde edilir. Yapabilir ilerici için.
Rocker mekanizmaları, çalışma asimetrisinin doğal özelliklerinden dolayı planyalarda geniş uygulama alanı bulmuştur. boşta hareket. Genellikle uzun bir çalışma strokuna ve kesicinin orijinal konumuna geri dönmesini sağlayan hızlı bir rölanti strokuna sahiptirler.
Pirinç. 2.3. Çeşitli rocker mekanizmaları:
1 krank; 2 taş; 3 kanat.
Menteşe-kol mekanizmaları robotikte büyük kullanım alanı bulmuştur (Şekil 2.4).
Bu mekanizmaların özelliği, sahip oldukları Büyük bir sayı serbestlik dereceleri, bu da birçok sürücüye sahip oldukları anlamına gelir. Giriş bağlantılarının tahriklerinin koordineli çalışması, tutucunun rasyonel bir yörünge boyunca ve çevreleyen alanda belirli bir yere hareket etmesini sağlar.
Mühendislikte yaygın uygulamakam mekanizmaları. Kam mekanizmalarının yardımıyla, belirli bir yasaya göre tahrikli bağlantının hemen hemen her hareketini elde etmenin yapısal olarak en kolay yoludur,
şu anda var Büyük sayı bazıları Şekil 2'de gösterilen kam mekanizmaları çeşitleri. 2.5.

Kam mekanizmasının çıkış bağlantısının gerekli hareket yasası, giriş bağlantısına (kam) uygun bir şekil verilerek elde edilir. Kam dönme gerçekleştirebilir (Şekil 2.5, bir, b ), öteleme (Şekil 2.5, c, g ) veya karmaşık hareket. Çıkış bağlantısı, eğer bir öteleme hareketi yapıyorsa (Şekil 2.5, bir, içinde ), itici olarak adlandırılır ve sallanırsa (Şekil 2.5, G ) - rockçı. Daha yüksek kinematik çiftte sürtünme kayıplarını azaltmak için AT ek bir bağlantı silindiri kullanın (Şekil 2.5, G ).
Kam mekanizmaları hem çalışan makinelerde hem de çeşitli kumanda cihazlarında kullanılmaktadır.
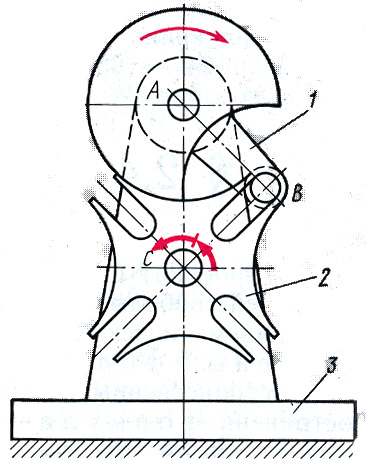
Çok sık olarak, metal kesme makinelerinde, preslerde, çeşitli aletlerde ve ölçüm cihazlarında, en basiti Şekil 1'de gösterilen vida mekanizmaları kullanılır. 2.6:
Pirinç. 2.6 Vida mekanizması:
1 - vida; 2 - somun; A, B, C - kinematik çiftler
Vidalı mekanizmalar genellikle dönme hareketini birbirine bağlı öteleme hareketine dönüştürmenin gerekli olduğu veya bunun tersinin gerekli olduğu durumlarda kullanılır. Hareketlerin birbirine bağımlılığı, vida çiftinin geometrik parametrelerinin doğru seçilmesiyle sağlanır. AT .
kama mekanizmalar (Şekil 2.7) kullanılır farklı tür Sınırlı giriş kuvvetleriyle büyük bir çıkış kuvveti oluşturmanın gerekli olduğu kenetleme cihazları ve fikstürleri. Bu mekanizmaların ayırt edici bir özelliği, tasarımın sadeliği ve güvenilirliğidir.
Sürtünme kuvvetleri nedeniyle temas eden cisimler arasında hareket aktarımının gerçekleştirildiği mekanizmalara sürtünme denir. En basit üç bağlantılı sürtünme mekanizmaları, Şek. 2.8

Pirinç. 2.7 Kama mekanizması:
1, 2 - bağlantılar; L, V, C - kinematik bayramlar.

Pirinç. 2.8 Sürtünme mekanizmaları:
a - paralel eksenli sürtünme mekanizması; b - kesişen eksenlere sahip sürtünme mekanizması; içinde - kremayer ve pinyon sürtünme mekanizması; 1 - giriş silindiri (tekerlek);
2 çıkış silindiri (tekerlek); 2" - ray
Linklerin olması nedeniyle 1 ve 2 birbirine bağlı, aralarındaki temas hattı boyunca, sürülen bağlantıyı kendisiyle birlikte sürükleyen bir sürtünme kuvveti ortaya çıkar. 2 .
Sürtünme dişlileri, cihazlarda, bant sürücülerinde, varyatörlerde (yumuşak hız kontrollü mekanizmalar) yaygın olarak kullanılmaktadır.
İletim için döner hareket Belirli bir yasaya göre, paralel, kesişen ve kesişen eksenli miller arasında çeşitli tipte dişliler kullanılır. mekanizmalar . Dişliler yardımı ile hem miller arası hareket aktarımı yapılabilmektedir.sabit akslar, Böylece uzayda hareket etmek.
Dişli mekanizmalar, çıkış bağlantısının dönme sıklığını ve yönünü, hareketlerin toplamını veya ayrılmasını değiştirmek için kullanılır.

Şek. 2.9, sabit dingilli dişlilerin ana temsilcilerini gösterir.
Şekil 2.9. Sabit akslı dişli tahrikler:
a - silindirik; b - konik; Sonunda; g - raf;
1 - dişli; 2 - dişli; 2 * ray
Birbirine geçen iki dişliden daha küçüğüne denir. dişli ve daha fazlası - dişli çark.
Raf, eğrilik yarıçapının sonsuza eşit olduğu bir dişli çarkın özel bir durumudur.

Dişli takımının hareketli aksları olan dişlileri varsa, bunlara gezegen denir (Şekil 2.10):
Bununla birlikte, sabit aks dişlilerine kıyasla planet dişliler, daha az sayıda dişli ile daha fazla güç ve dişli oranlarının aktarılmasına izin verir. Ayrıca toplama ve diferansiyel mekanizmaların oluşturulmasında da yaygın olarak kullanılırlar.
Kesişen eksenler arasındaki hareketlerin iletimi, bir sonsuz dişli kullanılarak gerçekleştirilir (Şekil 2.11).

Somun uzunlamasına kesilerek ve karşılıklı olarak dik düzlemlerde iki kez katlanarak bir vida-somun transmisyonundan bir sonsuz dişli elde edilir. Sonsuz dişli kendi kendini frenleme özelliğine sahiptir ve büyük dişli oranlarını tek aşamada uygulamanıza olanak tanır.
Pirinç. 2.11. Sonsuz dişli:
1 - solucan, 2 - sonsuz tekerlek.
Aralıklı hareket dişli mekanizmaları ayrıca Malta çapraz mekanizmasını da içerir. Şek. З-Л "2. dört bıçaklı "Malta haçı" mekanizmasını gösterir.
"Malta haçı" mekanizması, önde gelen çiftin sürekli dönüşünü dönüştürür - bir fenerle krank 1 3 "çapraz" ın aralıklı dönüşüne 2 , fener 3 darbe olmadan "çapraz" radyal oluğuna girer 2 ve onu köşeye çevirir z oluk sayısıdır.
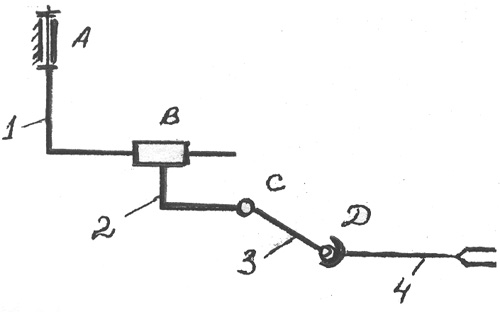
Hareketi sadece bir yönde gerçekleştirmek için cırcır mekanizmaları kullanılır. Şekil 2.13, bir külbütör kolu 1, bir cırcır çarkı 3 ve mandallar 3 ve 4'ten oluşan bir cırcır mekanizmasını göstermektedir.

Rocker'ı sallarken 1 sallanan köpek 3 cırcır tekerleğe dönüş sağlar 2 sadece külbütör saat yönünün tersine hareket ettirirken. Tekerleği tutmak için 2 külbütör zamana karşı hareket ettiğinde kendiliğinden saat yönünde dönüşten, bir kilitleme mandalı kullanılır 4 .
Maltese ve cırcır mekanizmaları, takım tezgahlarında ve aletlerde yaygın olarak kullanılmaktadır,
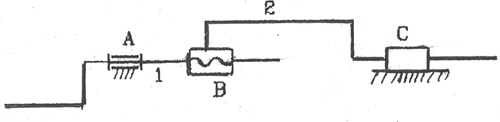
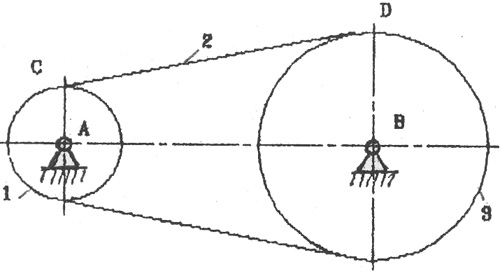
Göreceli olarak transfer etmek gerekirse uzun mesafe uzayda bir noktadan diğerine mekanik enerji, daha sonra esnek bağlantılara sahip mekanizmalar kullanılır.
Kayışlar, halatlar, zincirler, ipler, kurdeleler, toplar vb. Hareketi bir mekanizmadan diğerine ileten esnek bağlantılar olarak kullanılır,
Şek. 2.14, esnek bir bağlantıya sahip en basit mekanizmanın bir blok şemasını göstermektedir.
Esnek bağlantılara sahip dişliler, makine mühendisliği, alet yapımı ve diğer endüstrilerde yaygın olarak kullanılmaktadır.
En tipik basit mekanizmalar yukarıda ele alınmıştır. mekanizmalar ayrıca özel Literatür, sertifikalar ve referans kitaplarında da verilmektedir, örneğin.
Mekanizmaların yapısal formülleri.
Çeşitli mekanizmaların yapısında (yapısında) serbestlik derecesi sayısını ilişkilendiren genel kalıplar vardır. W bağlantı sayısı ve kinematik çiftlerinin sayısı ve türü ile mekanizma. Bu kalıplara mekanizmaların yapısal formülleri denir.
Mekansal mekanizmalar için, Malyshev'in formülü şu anda en yaygın olanıdır ve türevi aşağıdaki gibidir.
İle bir mekanizmaya izin verin m bağlantılar (raf dahil), - bir, iki, üç, dört ve beş hareketli çift sayısı. Hareketli bağlantıların sayısını gösterelim. Tüm hareketli bağlantılar olsaydı özgür bedenler, toplam sayısı serbestlik derecesi 6 olur n . Ancak, her bir tek hareketli çift V sınıfı, bir çift oluşturan bağlantıların nispi hareketini, her biri iki hareketli çift olmak üzere 5 bağ uygular. IV sınıf - 4 bağ vb. Bu nedenle, altıya eşit olan toplam serbestlik derecesi sayısı, miktar kadar azalacaktır.
bir kinematik çiftin hareketliliği nerede, hareketliliği eşit olan çiftlerin sayısıdır. i . Üst üste binen bağlantıların toplam sayısı belirli bir sayıyı içerebilir. q mekanizmanın hareketliliğini azaltmadan diğer bağlantıları çoğaltan, ancak onu yalnızca statik olarak belirsiz bir sisteme dönüştüren yedekli (tekrarlanan) bağlantılar. Bu nedenle, rafa göre hareketli kinematik zincirinin serbestlik derecesi sayısına eşit olan uzamsal mekanizmanın serbestlik derecesi sayısı, aşağıdaki Malyshev formülü ile belirlenir:
veya kısaca
(2.2)
mekanizma için statik olarak belirli sistem, için - statik olarak belirsiz sistem.
Genel durumda, denklem (2.2)'nin çözümü zor bir problemdir, çünkü bilinmeyen W ve q ; mevcut çözümler karmaşıktır ve bu derste ele alınmamıştır. Ancak, belirli bir durumda, eğer W , geometrik hususlardan bulunan mekanizmanın genelleştirilmiş koordinatlarının sayısına eşit, bu formülden gereksiz bağlantıların sayısını bulabilirsiniz (bkz. Reshetov L. N. Rasyonel mekanizmaların tasarlanması. M., 1972)
(2.3)
ve mekanizmanın statik belirlenebilirliği problemini çözmek; veya mekanizmanın statik olarak belirlendiğini bilerek, bulun (veya kontrol edin) W.
Yapısal formüllerin bağlantıların boyutlarını içermediğine dikkat etmek önemlidir, bu nedenle mekanizmaların yapısal analizinde bunların herhangi biri olduğu varsayılabilir (belirli sınırlar içinde). Yedek bağlantı () yoksa, mekanizmanın montajı bağlantıların deformasyonu olmadan gerçekleşir, ikincisi kendi kendini ayarlıyor gibi görünmektedir; bu nedenle, bu tür mekanizmalara kendi kendine hizalama denir. Fazla bağlantılar () varsa, mekanizmanın montajı ve bağlantılarının hareketi ancak ikincisi deforme olduğunda mümkün olur.
Yedek bağlantıları olmayan düz mekanizmalar için yapısal formül 1869'da dönme çiftleri ve bir serbestlik dereceli kaldıraç mekanizmaları için ilk kez öneren P. L. Chebyshev'in adını taşıyor. Şu anda, Chebyshev formülü herhangi bir düz mekanizmaya genişletildi ve aşağıdaki gibi aşırı kısıtlamalar dikkate alınarak türetildi.
m bağlantılı düz bir mekanizmaya izin verin (raf dahil), - hareketli bağlantıların sayısı, - alt çiftlerin sayısı ve - daha yüksek çiftlerin sayısı. Tüm hareketli bağlantılar düzlemsel hareket yapan serbest cisimler olsaydı, toplam serbestlik derecesi sayısı 3'e eşit olurdu. n . Bununla birlikte, her bir alt çift, çifti oluşturan bağlantıların nispi hareketi üzerine bir serbestlik derecesi bırakarak iki bağ yükler ve her bir yüksek çift, 2 serbestlik derecesi bırakarak bir bağ yükler.
Üst üste binen bağların sayısı, ortadan kaldırılması mekanizmanın hareketliliğini artırmayan belirli sayıda fazlalık (tekrarlanan) bağ içerebilir. Sonuç olarak, düz bir mekanizmanın serbestlik derecesi sayısı, yani hareketli kinematik zincirinin rafa göre serbestlik derecesi sayısı, aşağıdaki Chebyshev formülü ile belirlenir:
(2.4)
Biliniyorsa buradan yedekli bağlantıların sayısını bulabilirsiniz.
(2.5)
"p" indeksi şu gerçeği ifade eder: Konuşuyoruz ideal olarak düz bir mekanizma hakkında veya daha doğrusu düz şeması hakkında, çünkü imalattaki yanlışlıklar nedeniyle düz bir mekanizma bir dereceye kadar mekansaldır.
(2.2)-(2.5) formüllerine göre, mevcut mekanizmaların yapısal bir analizi ve yeni mekanizmaların yapısal diyagramlarının bir sentezi gerçekleştirilir.
Yapısal Analiz ve mekanizmaların sentezi.
Yedekli bağlantıların makinelerin performansı ve güvenilirliği üzerindeki etkisi.
Yukarıda belirtildiği gibi, isteğe bağlı (belirli sınırlar dahilinde) bağlantı boyutlarında, yedekli bağlantılara () sahip bir mekanizma, bağlantı deformasyonu olmadan monte edilemez. Bu nedenle, bu tür mekanizmalar artan üretim doğruluğu gerektirir, aksi takdirde, montaj işlemi sırasında mekanizmanın bağlantıları deforme olur, bu da kinematik çiftlerin yüklenmesine neden olur ve önemli ek kuvvetlerle bağlantılara (bu temellere ek olarak) dış kuvvetler, mekanizmanın amaçlandığı iletim için). Aşırı bağlantılara sahip bir mekanizmanın imalatında yetersiz doğrulukla, kinematik çiftlerdeki sürtünme büyük ölçüde artabilir ve bağlantıların sıkışmasına neden olabilir, bu nedenle bu açıdan mekanizmalardaki aşırı bağlantılar istenmez.
Mekanizmanın kinematik zincirlerindeki gereksiz bağlantılara gelince, makineler tasarlanırken, tasarımın karmaşıklığı veya başka nedenlerle tamamen ortadan kaldırılmasının kârsız olduğu ortaya çıkarsa, bunlar ortadan kaldırılmalı veya minimum miktarda bırakılmalıdır. Genel durumda, gerekli teknolojik ekipmanın mevcudiyeti, üretim maliyeti, gerekli hizmet ömrü ve makinenin güvenilirliği dikkate alınarak en uygun çözüm aranmalıdır. Bu nedenle, bu her özel durum için çok zor bir iştir.
Örnekler kullanarak mekanizmaların kinematik zincirlerindeki gereksiz bağlantıları belirleme ve ortadan kaldırma metodolojisini ele alacağız.
Dört tek hareketli dönme çiftine sahip düz bir dört bağlantı mekanizmasına izin verin (Şekil 2.15, a ) imalat hatalarından dolayı (örneğin eksenlerin paralel olmamasından dolayı) A ve D ) uzaysal olduğu ortaya çıktı. Kinematik zincirlerin montajı 4 , 3 , 2 ve ayrı ayrı 4 , 1 zorluklara neden olmaz, ancak puan B, B eksene yerleştirilebilir X . Ancak, bir dönme çiftini bir araya getirmek için AT , bağlantılardan oluşan 1 ve 2 , sadece koordinat sistemlerini birleştirerek mümkün olacaktır. Bxyz ve Bxyz noktanın doğrusal bir yer değiştirmesini (deformasyon) gerektiren x ekseni boyunca B bağlantısı 2 ve bağlantının açısal deformasyonları 2 x ve z eksenleri etrafında (oklarla gösterilmiştir). Bu, mekanizmada (2.3) formülüyle de doğrulanan üç fazla bağ olduğu anlamına gelir: . Bu uzamsal mekanizmanın statik olarak belirlenebilir olması için, örneğin Şekil 2'de gösterilen diğer yapısal şemasına ihtiyaç vardır. 2.15, b , nerede Böyle bir mekanizmanın montajı, noktaların hizalanmasından bu yana, sızdırmazlık olmadan gerçekleşecektir. B ve B noktayı hareket ettirerek mümkün olacakİTİBAREN silindirik bir çiftte.
Mekanizmanın bir çeşidi mümkündür (Şekil 2.15, içinde ) iki küresel çiftle (); Bu durumda, bunun dışındatemel hareketlilikmekanizma beliriryerel hareketlilik- biyel kolunu döndürme yeteneği 2 kendi ekseni etrafında güneş ; bu hareketlilik, mekanizmanın temel hareket yasasını etkilemez ve menteşelerin aşınmasını dengelemek açısından bile faydalı olabilir: biyel 2 mekanizmanın çalışması sırasında dinamik yükler nedeniyle kendi ekseni etrafında dönebilmektedir. Malyshev formülü, böyle bir mekanizmanın statik olarak belirleneceğini doğrular:

Pirinç. 2.15
En basit ve etkili yöntem cihaz mekanizmalarında gereksiz bağlantıların ortadan kaldırılması - iki alt çiftli bir bağlantı yerine nokta temaslı daha yüksek bir çiftin kullanılması; Bu durumda düz mekanizmanın hareketlilik derecesi değişmez, çünkü Chebyshev formülüne (at) göre:
Şek. 2.16, a, b, c Kademeli olarak hareket eden bir makaralı iticiye sahip bir kam mekanizmasındaki fazla bağlantıların ortadan kaldırılmasına ilişkin bir örnek verilmiştir. Mekanizma (Şekil 2.16, a ) - dört bağlantı (); ana hareketlilik hariç (kam dönüşü 1
) yerel hareketlilik var (yuvarlak silindirik bir silindirin bağımsız dönüşü 3
kendi ekseni etrafında) Sonuç olarak, . Düz şemada yedek bağlantı yoktur (mekanizma parazitsiz olarak monte edilir). Üretimdeki yanlışlıklar nedeniyle mekanizma mekansal olarak kabul edilirse, o zaman silindirin doğrusal teması ile 3 kam 1 ile Malyshev'in formülüne göre , elde ederiz, ancak belirli bir koşul altında. Kinematik çift silindir - silindir (Şekil 2.16, 6
) bağlantıların göreceli dönüşü imkansız olduğunda 1 , 3 z ekseni etrafında üçlü bir çift olacaktır. Üretimdeki yanlışlıklar nedeniyle böyle bir dönüş meydana gelirse, ancak küçükse ve doğrusal temas pratik olarak korunursa (yük altında, temas yaması bir dikdörtgene yakındır), o zaman bu 
kinematik çift bu nedenle dört hareketli olacaktır ve
Şekil2.17
Namlu biçimli bir silindir kullanarak en yüksek çiftin sınıfını azaltmak (nokta temaslı beş hareketli çift, Şekil 2.16, içinde ), ve için elde ederiz - mekanizma statik olarak belirlenir. Bununla birlikte, bağlantıların doğrusal temasının, artan üretim doğruluğu gerektirmesine rağmen, nokta temasından daha büyük yükleri aktarmanıza izin verdiği unutulmamalıdır.
Şekil 2.16, d, e dört bağlantılı bir dişlide (, tekerleklerin dişlerinin teması) fazlalık bağlantıların ortadan kaldırılması için başka bir örnek verilmiştir. 1, 2 ve 2, 3 - doğrusal). Bu durumda, Chebyshev formülüne göre, - düz şemada fazladan bağlantı yoktur; Malyshev formülüne göre, mekanizma statik olarak belirsizdir, bu nedenle, özellikle üç tekerleğin geometrik eksenlerinin paralelliğini sağlamak için yüksek üretim doğruluğu gerekli olacaktır.
Avara dişlerinin değiştirilmesi 2 namlu şeklinde (Şekil 2.16, d ), statik olarak belirli bir mekanizma elde ederiz.
kinematik çift iki katı bağlantının hareketli konjugasyonu, iletişim koşulları tarafından göreli hareketlerine kısıtlamalar getirir. Bağlantı koşullarının her biri bir serbestlik derecesini ortadan kaldırır ,
yani, uzayda 6 bağımsız göreli hareketten birinin olasılığı. Dikdörtgen bir koordinat sisteminde, 3 mümkündür öteleme hareketleri(3 koordinat ekseni yönünde) ve 3 dönme (bu eksenlerin etrafında). İletişim koşullarının sayısına göre S K. p. 5 sınıfa ayrılır. Serbestlik derecesi sayısı K. p. W=6-S. Her sınıf içinde, K. öğeleri, bağlantıların kalan olası göreli hareketlerine göre türlere ayrılır. Bağlantıların temasının niteliğine göre, alt K. p. - yüzeyler boyunca temas ile ve daha yüksek olanlar - çizgiler boyunca veya noktalarda temas ile ayırt edilir. Tüm 5 sınıf ve birçok tür için daha yüksek K. eşyaları mümkündür; alt - sadece 3 sınıf ve 6 tür ( şek.1
). Geometrik olarak kapalı ve kapalı olmayan CP arasında da bir ayrım yapılır. pilav. bir
) ve ikinci olarak, sözde kapatma için bir baskı kuvveti gereklidir. zorla kapatma (örneğin, bir kam mekanizmasında). Geleneksel olarak, birkaç ara yuvarlanma elemanına (örneğin, bilyalı ve makaralı rulmanlar) ve ara deforme olabilir elemanlara (örneğin, yassı yaylı cihazların boşluksuz menteşeleri olarak adlandırılan) sahip hareketli kaplinler k olarak adlandırılır. pilav. 2
). N. Ya. Niberg.
Büyük sovyet ansiklopedisi. - M.: Sovyet Ansiklopedisi. 1969-1978 .
Diğer sözlüklerde "Kinematik çift" in ne olduğunu görün:
Mekanizmanın 2 bağlantısının bağıl hareketlerine izin verir. Bağlantıların yüzeye temas ettiği kinematik çift, alt çift olarak adlandırılır (örneğin, bir dönme menteşesi, bir öteleme kaydırıcısı ve bir kılavuz). Kinematik çift, ... ... Büyük Ansiklopedik Sözlük
kinematik çift- İki bitişik bağlantının, göreli hareketlerine izin veren çift Bağlantısı. [Önerilen terimlerin toplanması. Sayı 99. Mekanizmalar ve makineler teorisi. SSCB Bilimler Akademisi. Bilimsel ve Teknik Terminoloji Komitesi. 1984] Konu teorisi ... ... Teknik Çevirmenin El Kitabı- kinematinė pora durumları T sritis fizika atitikmenys: angl. kinematik çift vok. kinematisches Elementenpaar, n rusya. kinematik çift, f pranc. çift sinematik, f … Fizikos terminų žodynas
Birbirine bağlı iki bağlantının birbiriyle ilişkili olmasını sağlayan bağlantı. trafik. Bir linkin başka bir link ile temas edebileceği yüzeylere, çizgilere, noktalara denir. bağlantı elemanları. K. p. alt (temas yüzeyleri) ve daha yüksek olarak ayrılır ... ... Büyük ansiklopedik politeknik sözlük
kinematik çift- kinematik çift Mekanizmanın iki katı gövdesinin, verilen göreceli hareketlerine izin veren bağlantısı. Kodu IFToMM: 1.2.3 Bölüm: MEKANİZMALAR VE MAKİNELER TEORİSİNİN GENEL KAVRAMLARI ... Mekanizmalar ve makineler teorisi
çift- kinematik çift; çift İki bitişik bağlantının bağlantısı, onlardan göreli harekete izin verir. birkaç kuvvet; çift sistem iki paralel kuvvetler, mutlak değerde eşit ve zıt yönlere yönlendirilmiş ...
üst çift- Bağlantıların gerekli nispi hareketinin ancak elemanlarına çizgiler boyunca ve noktalarda dokunarak elde edilebildiği bir kinematik çift ... Politeknik terminolojik açıklayıcı sözlük





