Teorik mekaniğin temel formülleri. Sonucun geometrik olarak belirlenmesi
teorik malzeme
Bağ Bir kuvvetin etkisi altında başka bir cismin hareket etmesini engelleyen cisim.
iletişim reaksiyonu- bağlantının kendisinde ortaya çıkan güç. Tepki her zaman bağın vücudun hareketini engellediği yönün tersidir. Tüm bedenler özgür olabilir ve özgür olmayabilir. Özgür cismin hiçbir bağlantısı yoktur. Serbest olmayan herhangi bir cisim, üzerine etki eden bağların yerini reaksiyonlar alıyorsa, serbest olarak temsil edilebilir.
Bağlantı türleri:
 a) Pürüzsüz yüzey veya düzlem, yani sürtünmesiz bir yüzey. Bu bağın reaksiyonu her zaman temas noktasına dik olarak yönlendirilir. R - bağ reaksiyonu
a) Pürüzsüz yüzey veya düzlem, yani sürtünmesiz bir yüzey. Bu bağın reaksiyonu her zaman temas noktasına dik olarak yönlendirilir. R - bağ reaksiyonu
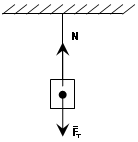
 b) pürüzsüz destek Bu bağın reaksiyonları, temas noktasına dik olarak yönlendirilir. (Reaksiyon, bir yapı içindeki bir kuvvettir). Değeri malzemeye, boyuta ve dış kuvvete bağlıdır.
b) pürüzsüz destek Bu bağın reaksiyonları, temas noktasına dik olarak yönlendirilir. (Reaksiyon, bir yapı içindeki bir kuvvettir). Değeri malzemeye, boyuta ve dış kuvvete bağlıdır.
 içinde) Esnek bağlantı- bir kablo, halat, zincir ile gerçekleştirilen sadece gerilimde çalışan bir bağlantı. Esnek bir bağın tepkisi, bağın kendisi boyunca bağlanma noktasına, yani kuvvetin yönünün tersine yönlendirilir.
içinde) Esnek bağlantı- bir kablo, halat, zincir ile gerçekleştirilen sadece gerilimde çalışan bir bağlantı. Esnek bir bağın tepkisi, bağın kendisi boyunca bağlanma noktasına, yani kuvvetin yönünün tersine yönlendirilir.

 G) Sert çubuklar. Çeşitli kirişler, I-kirişler, kanallar tarafından gerçekleştirilir. Bağlantı hem gerilimde hem de sıkıştırmada çalışır. Çubuk gerilimdeyse, reaksiyon çubuk boyunca sabitleme yerine yönlendirilir, sıkıştırma durumundaysa reaksiyon çubuğun ötesine yönlendirilir.
G) Sert çubuklar. Çeşitli kirişler, I-kirişler, kanallar tarafından gerçekleştirilir. Bağlantı hem gerilimde hem de sıkıştırmada çalışır. Çubuk gerilimdeyse, reaksiyon çubuk boyunca sabitleme yerine yönlendirilir, sıkıştırma durumundaysa reaksiyon çubuğun ötesine yönlendirilir.
e) eklemli destek. Destekler hareketli ve sabittir. Sabit desteğin birbirine dik yerleştirilmiş iki reaksiyonu vardır. Hareketli desteğin yüzeye dik bir tepkisi vardır.
Hareketli destek Sabit destek

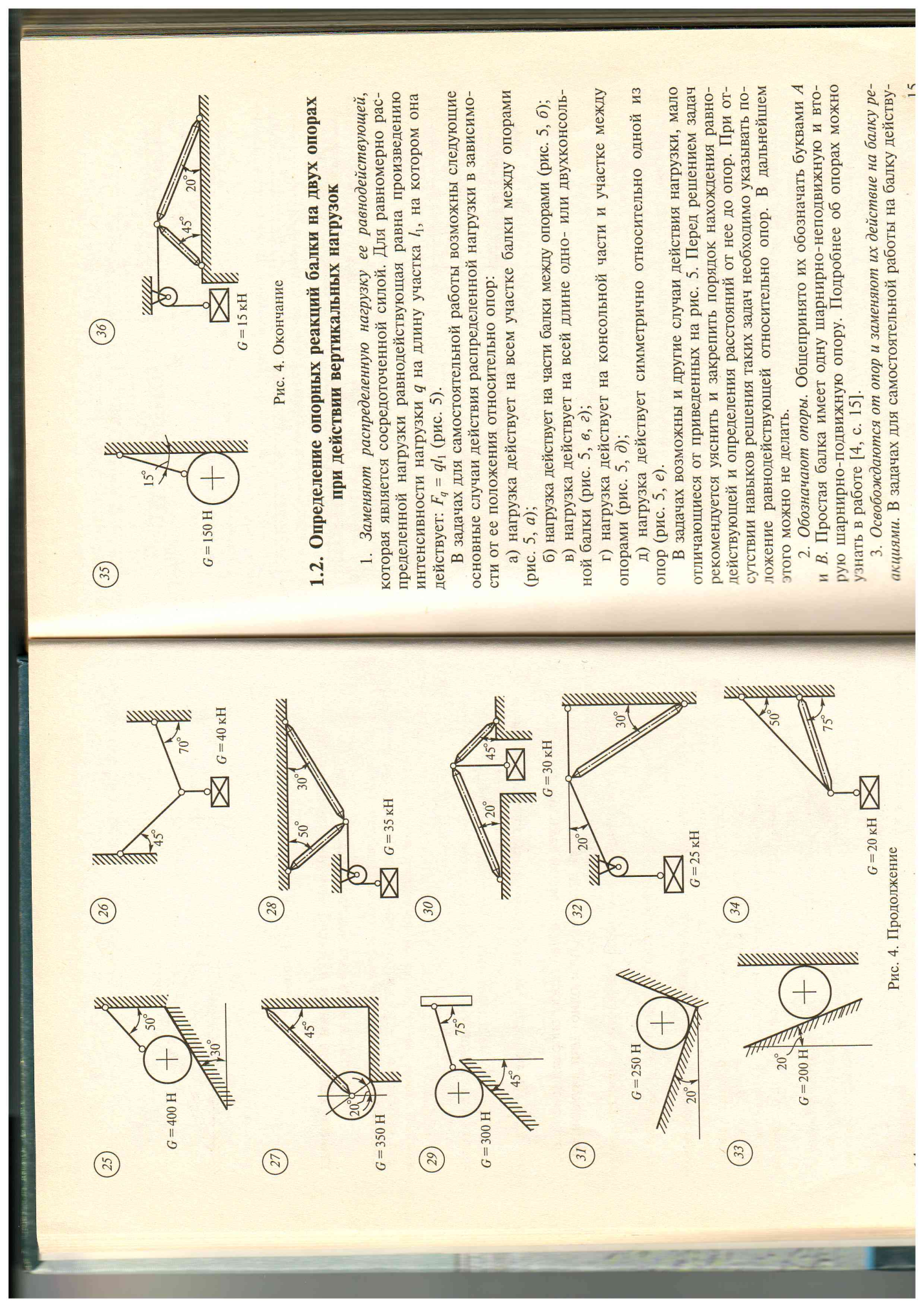
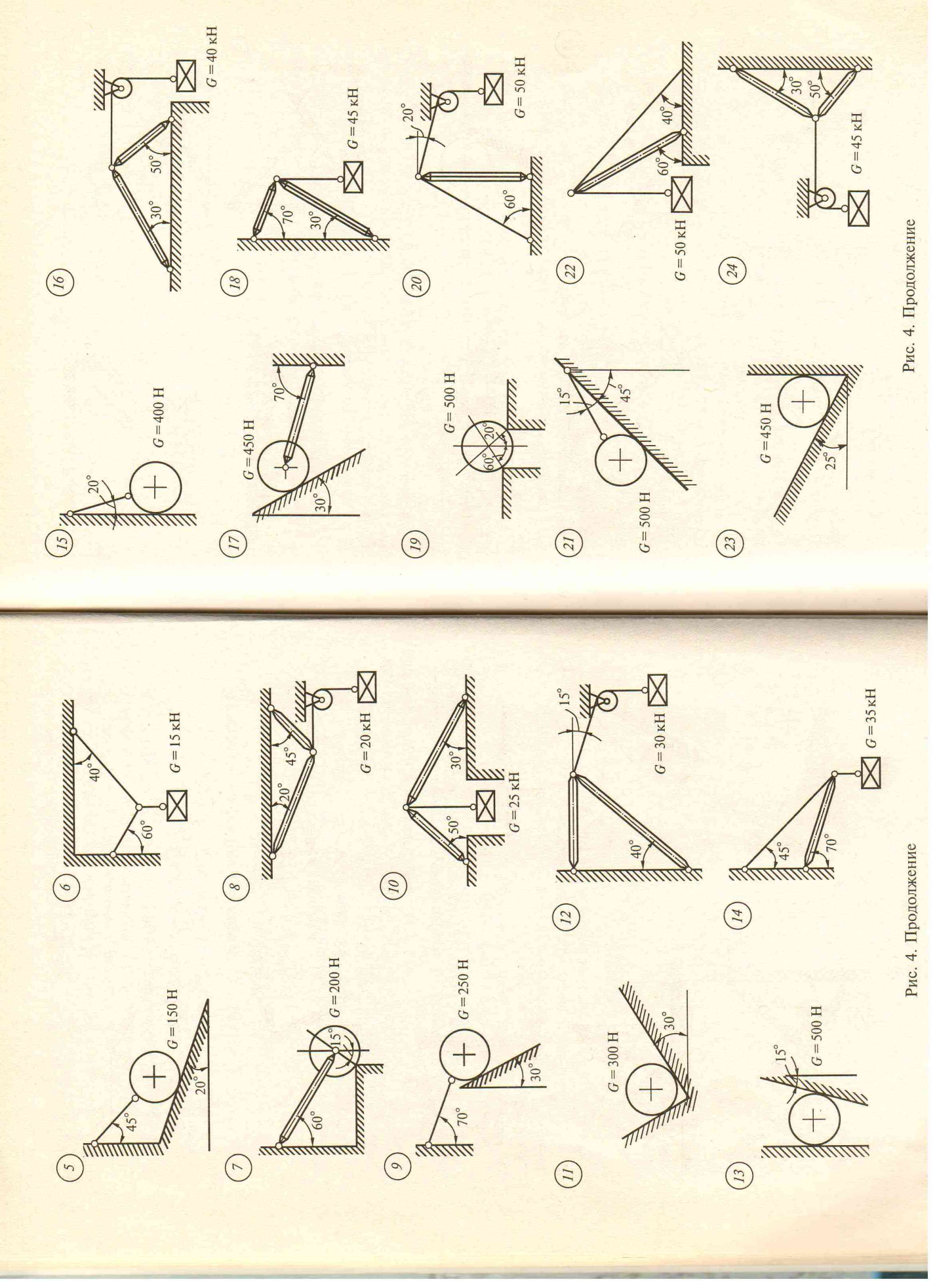
İşin yapılması için görevler
1. Sürümünüzün çizimlerini çizin.
2. Çizimi tanımlayın.
3. Bağlantı türünü belirleyin ve bunları reaksiyonlarla değiştirin.
Seçenek 18
1.
 | 2.
 | 3.
|
Test soruları:
1. Eksen ve projeksiyon arasındaki fark nedir?
2. Problemi çözerken kaç tane denge denklemi yaptınız?
3. PSSS problemlerini çözme metodolojisi.
4. Düz bir yakınsak kuvvetler sistemi tanımlayın.
5. Kuvvetin koordinat düzlemindeki izdüşümü nedir?
Edebiyat:
1. Verein L.I. Teknik mekanik - M: Akademi, 2006.
2. Movnin M.S. Teknik mekaniğin temelleri - St. Petersburg: Politeknik, 2003.
3. Molchanova E.V., Shurygina G.N. Malzemelerin statiği ve mukavemeti - Tomsk, 2008.
Pratik çalışma №2
Ders konusu: Yakınsayan kuvvetlerden oluşan düz bir sistemin kuplaj reaksiyonlarının belirlenmesi.
Ders türü: edinilen bilginin konsolidasyonu.
Dersin amacı: Düz bir yakınsak kuvvetler sisteminin bağ reaksiyonlarını belirlemeyi öğrenin
Sağlamak şu anlama gelir:
1. işin performansı için metodolojik rehberlik;
2. bireysel görev;
3. not defteri pratik iş;
7. hesap makinesi.
İş teknolojisi:
1. Dikkatli çalışın yönergeler, önerilen teorik malzeme.
2. Seçeneğe göre görevi aşağıda sunulan metodolojiye göre tamamlayın.
3. Yapılan iş hakkında sonuçlar çıkarın.
4. Güvenlik sorularını yanıtlayın.
teorik malzeme
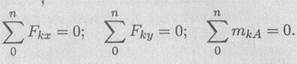
Rastgele yerleştirilmiş kuvvetlerin düz bir sisteminin koşulları ve denge denklemleri.
Kuvvetler sistemi bir noktaya indirgendiğinde, R hl ve M hl elde edilir.
Kuvvet sistemi dengedeyse, R ch \u003d 0, M ch \u003d 0.
Bu sistem için üç tür denge denklemi yazalım.
İlk bakış
İkinci görünüm
Geometrik yöntem, bir kuvvet çokgeni oluşturmaktan, analitik yöntem ise tüm projeksiyonların toplamını belirlemekten oluşur. aktif kuvvetler birbirine dik iki eksen üzerinde.
Bileşkeyi belirlemek için grafiksel bir yöntemle kuvvet vektörleri herhangi bir sırada çizilebilir, sonuç (bileşenin büyüklüğü ve yönü) değişmez.
Elde edilen vektör yönlendirilir karşı kuvvet terimlerinin vektörleri.
Kuvvet poligonunun yapım sırası
1. İnşaat direğini seçin.
2. İlk F 2 vektörünün başlangıcını direğe (kuvvet vektörleri herhangi bir sırada çizilebilir) kendisine paralel hareket ettirerek, değerini koruyarak yerleştiriyoruz.
3. İkinci F 1'in başlangıcını birinci vektörün sonuna yerleştirin. Geri kalan F 4 , F 3 kuvvetlerinin vektörlerini aynı sırayla arka arkaya çiziyoruz.
4. Elde edilen vektör, elde edilen kesikli çizgiyi kapatır ; ilk vektörün başlangıcını sonuncunun sonu ile birleştirir ve ona doğru yönlendirilir.
Bir poligonda vektörlerin çizim sırasını değiştirdiğinizde, görüş rakamlar. Çizim sırası sonucu etkilemez.

PSSS için geometrik denge koşulu: kuvvet poligonu kapalı olmalıdır.
Sonucun analitik olarak belirlenmesi
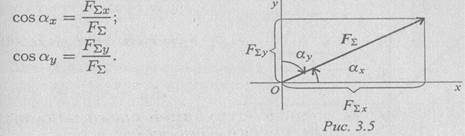
Bileşiğin modülü (değeri) bilinen projeksiyonlarla belirlenir:
![]()
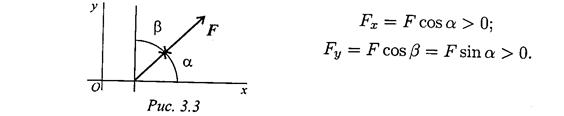
Bileşik vektörün yönü, bileşkenin koordinat eksenleri ile oluşturduğu açıların kosinüslerinin büyüklükleri ve işaretleri ile belirlenebilir (Şekil 3.5).
Eksen Üzerindeki Kuvvet Projeksiyonu
Kuvvetin eksen üzerindeki izdüşümü, vektörün başından ve sonundan eksene bırakılan dikmelerin kestiği eksen parçası tarafından belirlenir.
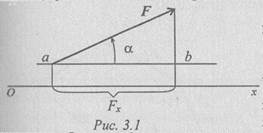
Eksen üzerindeki kuvvet projeksiyonunun büyüklüğü kuvvet modülünün çarpımına ve kuvvet vektörü ile kuvvet vektörü arasındaki açının kosinüsüne eşittir. pozitif yön eksenler. Böylece, projeksiyon işaretine sahiptir: Aynı yönde pozitif kuvvet vektörleri ve eksenleri ve olumsuz yönlendirildiğinde negatif eksene doğru(Şekil 3.2).


PSSS için analitik denge koşulu: karşılıklı olarak dik iki eksen üzerindeki tüm kuvvetlerin izdüşümlerinin toplamı sıfıra eşit olmalıdır.
ΣFx=0
ΣF y =0
Problemlerde, koordinat eksenleri, çözüm en basit olacak şekilde seçilir. En az bir bilinmeyen kuvvetin koordinat ekseni ile çakışması arzu edilir.
Konu 1.3. Rastgele yerleştirilmiş kuvvetlerin düzlemsel sistemi
Bir nokta etrafında kuvvet momenti
Cismin tutunma noktasından geçmeyen bir kuvvet, cismin noktaya göre dönmesine neden olur, dolayısıyla böyle bir kuvvetin cisim üzerindeki etkisi bir moment olarak tahmin edilir.
Güç anı noktaya göre, kuvvet modülü ve kolun çarpımına sayısal olarak eşittir.
Omuz - noktadan kuvvetin etki çizgisine en kısa mesafe (noktadan kuvvetin etki çizgisine dik indirilmiş) (Şekil 4.4). 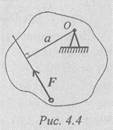
Moment tanımı M o ( İçinm o ( F);m 0 (F) = Fa.
ölçü birimi m o (F)= N m
Kuvvet vücudu saat yönünde döndürmeye çalışırsa, an pozitif olarak kabul edilir.
Kuvvetin etki çizgisi noktadan geçiyorsa, bir nokta etrafındaki kuvvet momenti sıfırdır, çünkü bu durumda noktadan kuvvete olan mesafe sıfırdır.
Rastgele yerleştirilmiş kuvvetlerin düzlemsel sistemi
ana vektör keyfi bir düzlem kuvvetler sisteminin vektörlerinin geometrik toplamına eşittir. Sistemin tüm kuvvetlerini koordinat eksenlerine yansıtırız ve eksenlere karşılık gelen projeksiyonları ekleyerek ana vektörün projeksiyonlarını elde ederiz.
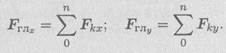
Ana vektörün koordinat eksenlerindeki izdüşümlerinin büyüklüğü ile ana vektörün modülünü buluruz:
![]()
Ana nokta kuvvetler sistemi cebirsel toplamına eşittir anlar indirgeme noktasına göre sistemin kuvvetleri. 
Böylece, PSPRS tek bir kuvvete indirgenir.(kuvvet sisteminin ana vektörü) ve bir dakika(kuvvetler sisteminin ana momenti).
PSPRS'nin Denge Durumunun Üç Biçimi
Farklı durumlar için üç grup denge denklemi kullanılır.

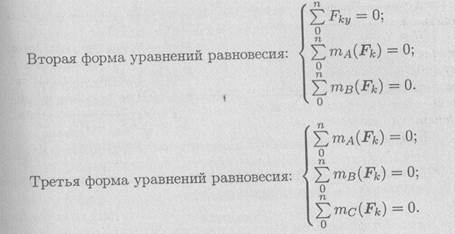
Belirli bir durum için, sistem dengeli ise paralel kuvvetler, sadece iki denge denklemi vardır:

Işın sistemleri. Destek reaksiyonlarının ve kıstırma momentlerinin belirlenmesi
Yük türleri
Uygulama yöntemine göre yükler konsantre ve dağıtılmış olarak ayrılır. Gerçekte yükün transferi ihmal edilebilir bir alanda (bir noktada) meydana gelirse, yük denir. konsantre.
Yük genellikle önemli bir alana veya hatta dağıtılır (barajdaki su basıncı, çatıdaki kar basıncı vb.), daha sonra yük dikkate alınır. dağıtıldı.
Kesinlikle rijit cisimler için statik problemlerinde, dağıtılmış yük, sonuçtaki yük ile değiştirilebilir. konsantre kuvvet (Şekil 6.1).
q
 |
l/2Q
q- yük yoğunluğu, N/m;
ben- dağıtılmış yükün hareket çizgisi, m;
Q = ql- sonuçta ortaya çıkan dağıtılmış yük.
Kiriş sistemlerinin destek çeşitleri(reaksiyonlara ve bağlantılarına bakın) Kiriş - desteklere sabitlenmiş ve kendisine uygulanan kuvvetlerle bükülmüş düz bir kiriş şeklinde yapısal bir parça.
Kiriş bölümünün yüksekliği, uzunluğa kıyasla önemsizdir. Sert sonlandırma (kıstırma)(Şekil 6.2)
Destek hareket ve dönüşe izin vermez. Sonlandırma, iki bileşen kuvveti ile değiştirilir Rax ve R A y ve bir an ile bir çift Bay A.
Bu bilinmeyenleri belirlemek için formda bir denklem sistemi kullanmak uygundur.
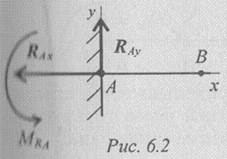
Her denklemin bir tane vardır bilinmeyen miktar ve ikame olmadan çözülür. Kararların doğruluğunu kontrol etmek için, kiriş üzerindeki herhangi bir noktaya göre ek bir moment hizalaması kullanılır, örneğin, B.
Belirli bir kiriş şeması için, l=14 m, a=3.8 m, b=5 m, M=11 kN m, F=10 kN ise mesnet reaksiyonlarını bulmak gerekir.
Çözüm. Yatay yük olmadığından, A desteği sadece dikey bir RA reaksiyonuna sahiptir. Denge denklemlerini A ve B noktalarına göre tüm kuvvetlerin momentleri şeklinde oluşturuyoruz.
nerede bulacağız

Kontrol etmek için dikey eksen için bir denge denklemi oluşturuyoruz:
sınav soruları
kiriş menteşe kuvvet noktası
> Kuvvetin eksene yansıması nasıldır?
Kuvvetin eksen üzerindeki izdüşümü, kuvvet modülünün çarpımına ve eksenin pozitif yönü ile kuvvet vektörü arasındaki açının kosinüsüne eşit bir cebirsel miktardır (yani, bu kuvvet tarafından çizilen segmenttir). karşılık gelen eksenler).
Px=Pcos?=Pcos90o=0;
Rx=Rcos? = -R cos(180o-?).
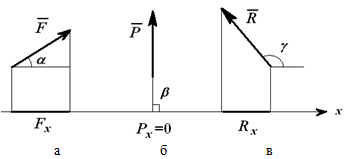
Kuvvetin eksen üzerindeki izdüşümü pozitiftir, şek. 2 a) 0 ise? ?< ?/2.
> Hangi durumda kuvvetin eksen üzerindeki izdüşümü sıfıra eşittir?
Kuvvetin eksen üzerindeki izdüşümü sıfır olabilir, şek. 2b) eğer? = ?/2.)
> Hangi durumda kuvvetin eksen üzerindeki izdüşümü kuvvetin modülüne eşittir?
Kuvvetin eksen üzerindeki izdüşümü kuvvet modülüne eşittir, eğer? =0?.
> Hangi durumda kuvvetin eksene yansıması negatif olur?
Kuvvetin eksen üzerindeki izdüşümü negatif olabilir, şek. 2 c) eğer?/2< ? ? ?.
> Düz bir yakınsak kuvvetler sistemi için kaç tane denge denklemi çizilir?
Etki çizgileri bir noktada kesişiyorsa kuvvetlere yakınsak denir. Tüm bu kuvvetlerin etki çizgileri aynı düzlemde olduğunda, yakınsak kuvvetlerin düz bir sistemini ayırt edin.
Yakınsak kuvvetler sisteminin dengesi.
Mekanik yasalarından şu sonucu çıkarır: sağlam karşılıklı olarak dengelenmiş dış kuvvetlerin üzerinde hareket ettiği, sadece hareketsiz olmakla kalmaz, aynı zamanda "ataletle" hareket diyeceğimiz bir hareket de yapabilir. Böyle bir hareket, örneğin, vücudun öteleme tekdüze ve doğrusal hareketi olacaktır.
Bundan iki önemli sonuç çıkarıyoruz:
1) Statik denge koşulları, hem duran bir cisme hem de “ataletle” hareket eden bir cisme etkiyen kuvvetler tarafından sağlanır.
2) Serbest bir katı cisme uygulanan kuvvetlerin dengesi, cismin kendi dengesi (dinlenmesi) için gerekli ancak yeterli olmayan bir koşuldur; bu durumda, vücut sadece hareketsizken ve kendisine dengeli kuvvetlerin uygulandığı ana kadar hareketsiz olacaktır.
Katı bir cisme uygulanan yakınsak kuvvetler sisteminin dengesi için bu kuvvetlerin bileşkesinin sıfıra eşit olması gerekli ve yeterlidir. Bu durumda kuvvetlerin kendilerinin karşılaması gereken koşullar, geometrik veya analitik biçimde ifade edilebilir.
1. Geometrik denge koşulu. Yakınsayan kuvvetlerin bileşkesi, bu kuvvetlerden oluşturulan kuvvet poligonunun kapanış tarafı olarak tanımlandığından, ancak ve ancak poligondaki son kuvvetin sonu birincinin başlangıcına denk gelirse, yani poligon kapandığında kaybolabilir. .
Sonuç olarak, sistemin yakınsayan kuvvetlerin dengesi için bu kuvvetlerden oluşturulan kuvvet poligonunun kapalı olması gerekli ve yeterlidir.
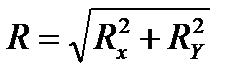
2. Analitik denge koşulları. Analitik olarak, bir yakınsak kuvvetler sisteminin sonucu aşağıdaki formülle belirlenir:
Pozitif terimlerin toplamı kökün altında olduğundan, R ancak her ikisi birden
yani cisme etki eden kuvvetler eşitlikleri sağladığında:
Eşitlikler, denge koşullarını analitik bir biçimde ifade eder: bir uzaysal yakınsak kuvvetler sisteminin dengesi için, bu kuvvetlerin üç koordinat ekseninin her biri üzerindeki izdüşümlerinin toplamının sıfıra eşit olması gerekli ve yeterlidir.
Cisim üzerine etkiyen tüm yakınsak kuvvetler aynı düzlemde bulunuyorsa, düz bir yakınsak kuvvetler sistemi oluştururlar. Düz bir yakınsak kuvvetler sistemi durumunda, açıkçası sadece iki denge koşulu elde ederiz.
Eşitlikler, yakınsak kuvvetlerin etkisi altında serbest bir katı cismin dengesi için gerekli koşulları (veya denklemleri) de ifade eder.
> Uçları menteşeli bir çubuğun tepkimesi hangi yöne yönlendirilir?
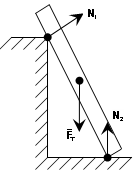
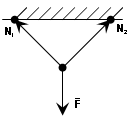
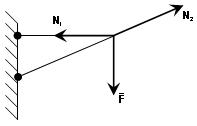
Bazı yapılarda, bağlantı uçlarında menteşelerle sabitlenmiş AB çubuğudur (Şekil 3). Algıladığı yüke kıyasla çubuğun ağırlığının ihmal edilebileceğini varsayalım. O zaman sadece A ve B menteşelerinde uygulanan iki kuvvet çubuğa etki edecektir.Fakat AB çubuğu dengede ise, o zaman A ve B noktalarında uygulanan kuvvetler bir düz çizgi boyunca, yani çubuğun ekseni boyunca yönlendirilmelidir. . Sonuç olarak, bu yüklere kıyasla ağırlığı ihmal edilebilecek uçlardan yüklenen bir çubuk sadece çekme veya basmada çalışır. Böyle bir çubuk bir bağ ise, çubuğun tepkimesi çubuğun ekseni boyunca yönlendirilecektir.

> Bir noktaya göre kuvvet momenti nasıldır?
Bir noktaya göre kuvvet momenti, kuvvet modülü ve noktadan kuvvetin etki çizgisine bırakılan dikmenin uzunluğunun çarpımı ile belirlenir (Şekil 4, a). Bir cisim O noktasına sabitlendiğinde, kuvvet onu bu nokta etrafında döndürme eğilimindedir. Anın alındığı O noktasına anın merkezi denir ve a dikinin uzunluğuna momentin merkezine göre kuvvetin omzu denir.

Kuvvetlerin momentleri newtonometreler (N m) veya kilogram metre (kgf m) veya karşılık gelen çoklu ve alt çoklu birimlerde ve ayrıca çiftlerin momentlerinde ölçülür.
Kuvvetin eksen üzerindeki izdüşümü, kesilen eksenin segmenti tarafından belirlenir.
vektörün başından ve sonundan eksene düşen dikeyler (Şekil 3.1).
Eksen üzerindeki kuvvet projeksiyonunun büyüklüğü kuvvet modülünün çarpımına ve kuvvet vektörü ile kuvvet vektörü arasındaki açının kosinüsüne eşittir. pozitif yön eksenler. Böylece, projeksiyon işaretine sahiptir: Aynı yönde pozitif kuvvet vektörleri ve eksenleri ve olumsuz yönlendirildiğinde negatif eksene doğru(Şekil 3.2).


Birbirine dik iki eksende kuvvet projeksiyonu(Şekil 3.3).
İş bitimi -
Bu konu şunlara aittir:
teorik mekanik
Teorik mekanik... DERS... Konu Statiğin temel kavramları ve aksiyomları...
Bu konuyla ilgili ek materyale ihtiyacınız varsa veya aradığınızı bulamadıysanız, çalışma veritabanımızdaki aramayı kullanmanızı öneririz:
Alınan malzeme ile ne yapacağız:
Bu materyalin sizin için yararlı olduğu ortaya çıktıysa, sosyal ağlarda sayfanıza kaydedebilirsiniz:
| cıvıldamak |
Bu bölümdeki tüm konular:
Teorik mekaniğin sorunları
Teorik mekanik, maddi katıların mekanik hareketinin ve bunların etkileşiminin bilimidir. Mekanik hareket, bir cismin uzayda ve zamanda hareket etmesi olarak anlaşılır.
Üçüncü aksiyom
Vücudun mekanik durumunu bozmadan, dengeli bir kuvvetler sistemi ekleyebilir veya kaldırabilirsiniz (sıfıra eşdeğer bir kuvvetler sistemini atma ilkesi) (Şekil 1.3). P,=P2 P,=P.
İkinci ve üçüncü aksiyomların sonucu
Rijit bir cisme etki eden kuvvet, hareket çizgisi boyunca hareket ettirilebilir (Şekil 1.6).
Bağlar ve Tahvillerin Tepkileri
Statiğin tüm yasaları ve teoremleri serbest bir katı cisim için geçerlidir. Tüm bedenler serbest ve bağlı olarak ayrılmıştır. gevşek gövdeler- hareketi sınırlı olmayan bedenler.
sert çubuk
Diyagramlarda çubuklar kalın bir düz çizgi ile gösterilmiştir (Şekil 1.9). çubuk mozhe
sabit menteşe
Ek noktası taşınamaz. Çubuk, menteşe ekseni etrafında serbestçe dönebilir. Böyle bir desteğin tepkisi menteşe ekseninden geçer, ancak
Yakınsak kuvvetlerin düzlemsel sistemi
Etki çizgileri bir noktada kesişen kuvvetler sistemine yakınsak denir (Şekil 2.1).
Yakınsak kuvvetlerin sonucu
Kesişen iki kuvvetin sonucu, bir paralelkenar veya bir kuvvet üçgeni (4. aksiyom) kullanılarak belirlenebilir (Vis. 2.2).
Yakınsak kuvvetlerin düz bir sistemi için denge koşulu
Kuvvetler sistemi dengedeyken bileşke sıfıra eşit olmalıdır, bu nedenle geometrik bir yapıda son vektörün sonu birincinin başlangıcıyla çakışmalıdır. Eğer bir
Denge problemlerini geometrik bir şekilde çözme
Sistemde üç kuvvet varsa geometrik yöntemi kullanmak uygundur. Denge problemlerini çözerken, cismin kesinlikle katı (katılaşmış) olduğu kabul edilir. Problem çözme sırası:
Çözüm
1. Sabitleme çubuklarında ortaya çıkan kuvvetlerin büyüklüğü, çubukların yükü desteklediği kuvvetlere eşittir (statikliğin 5. aksiyomu) (Şekil 2.5a). biz tanımlarız olası yönler bağ reaksiyonları
Analitik bir şekilde kuvvetler
Bileşiğin değeri, kuvvetler sisteminin vektörlerinin vektör (geometrik) toplamına eşittir. Sonucu geometrik olarak belirliyoruz. Bir koordinat sistemi seçiyoruz, tüm görevlerin projeksiyonlarını belirliyoruz
Analitik biçimde yakınsak kuvvetler
Sonucun sıfıra eşit olduğu gerçeğine dayanarak şunu elde ederiz: Koşul
Birkaç kuvvet, birkaç kuvvetin momenti
Bir çift kuvvet, modülünde eşit, paralel ve farklı yönlere yönlendirilmiş iki kuvvetten oluşan bir sistemdir. Bir çift oluşturan bir kuvvetler sistemi (P; B") düşünün.
Bir nokta etrafındaki kuvvet momenti.
Cismin tutunma noktasından geçmeyen bir kuvvet, cismin noktaya göre dönmesine neden olur, dolayısıyla böyle bir kuvvetin cisme etkisi bir moment olarak tahmin edilir. Kuvvet momenti rel.
Kuvvetlerin paralel transferi üzerine Poinsot teoremi
Bir kuvvet, hareket hattına paralel olarak, kuvvet modülü ve kuvvetin aktarıldığı mesafenin çarpımına eşit bir momente sahip bir çift kuvvet eklenerek aktarılabilir.
yerleşik kuvvetler
Keyfi bir kuvvet sisteminin hareket çizgileri bir noktada kesişmez, bu nedenle vücudun durumunu değerlendirmek için böyle bir sistem basitleştirilmelidir. Bunu yapmak için, sistemin tüm kuvvetleri keyfi olarak birine aktarılır.
Referans noktasının etkisi
Referans noktası keyfi olarak seçilir. İndirgeme noktasının konumunu değiştirdiğinizde, ana vektörün değeri değişmez. İndirgeme noktasının hareket ettirildiği ana anın değeri değişecektir,
Düz kuvvet sistemi
1. Dengede ana vektör sistem sıfır. Ana vektörün analitik tanımı şu sonuca götürür:
Yük türleri
Uygulama yöntemine göre yükler konsantre ve dağıtılmış olarak ayrılır. Gerçekte yük aktarımı ihmal edilebilir bir alanda (bir noktada) meydana gelirse, yüke konsantre denir.
Eksene göre kuvvet momenti
Eksen etrafındaki kuvvet momenti, eksenin düzlemle kesişme noktasına göre kuvvetin eksene dik bir düzleme izdüşümü momentine eşittir (Şekil 7.1 a). MO
uzayda vektör
Uzayda, kuvvet vektörü birbirine dik üç koordinat eksenine yansıtılır. Vektör projeksiyonları kenarları oluşturur küboid, kuvvet vektörü köşegen ile çakışır (Şekil 7.2).
Mekansal yakınsak kuvvetler sistemi
Uzamsal yakınsak kuvvetler sistemi, aynı düzlemde yer almayan, etki çizgileri bir noktada kesişen bir kuvvetler sistemidir. Ortaya çıkan uzaysal sistem si
O merkezine keyfi bir uzaysal kuvvetler sistemi getirmek
Mekansal bir kuvvetler sistemi verilmiştir (Şekil 7.5a). Onu merkeze getirelim O. Kuvvetler paralel olarak hareket ettirilmelidir ve bir kuvvet çiftleri sistemi oluşur. Bu çiftlerin her birinin momenti
Homojen düz cisimlerin ağırlık merkezi
(düz şekiller) Çoğu zaman çeşitli düz gövdelerin ve geometrik düz şekillerin ağırlık merkezini belirlemek gerekir. karmaşık şekil. Düz gövdeler için şunu yazabiliriz: V =
Düz şekillerin ağırlık merkezinin koordinatlarının belirlenmesi
Not. Simetrik bir şeklin ağırlık merkezi simetri ekseni üzerindedir. Çubuğun ağırlık merkezi yüksekliğin ortasındadır. Basit geometrik şekillerin ağırlık merkezlerinin konumları,
nokta kinematiği
Uzay, zaman, yörünge, yol, hız ve ivme hakkında bir fikriniz olsun.Bir noktanın hareketini nasıl ayarlayacağınızı bilin (doğal ve koordinat). Notasyonu bilin
Katedilen mesafe
Yol, seyahat yönünde yol boyunca ölçülür. Tanım - S, ölçü birimleri - metre. Nokta hareket denklemi: Denklem tanımlama
Seyahat hızı
Karakterize eden vektör miktarı şu an yörünge boyunca hareketin hızına ve yönüne hız denir. Hız, k boyunca yönlendirilmiş bir vektördür
nokta ivmesi
Hızın büyüklük ve yöndeki değişim oranını karakterize eden vektör miktarına bir noktanın ivmesi denir. M1 noktasından hareket ederken nokta hızı
tek tip hareket
Düzgün hareket, sabit bir hızda harekettir: v = sabit. Doğrusal düzgün hareket için (Şekil 10.1 a)
eşit değişkenli hareket
Eşit değişkenli hareket, sabit teğetsel ivmeli harekettir: at = const. Doğrusal düzgün hareket için
öteleme hareketi
Translasyonel, hareket sırasında vücut üzerindeki herhangi bir düz çizginin ilk konumuna paralel kaldığı katı bir cismin böyle bir hareketidir (Şekil 11.1, 11.2). saat
dönme hareketi
Dönme hareketi sırasında, vücudun tüm noktaları, ortak bir sabit eksen etrafındaki daireleri tanımlar. Vücudun tüm noktalarının etrafında döndüğü sabit eksene dönme ekseni denir.
Dönme hareketinin özel durumları
Düzgün dönüş (açısal hız sabittir): ω = const Bu durumda düzgün dönüş denklemi (yasası) şu şekildedir:
Dönen bir cismin noktalarının hızları ve ivmeleri
Cisim O noktası etrafında döner. Dönme ekseninden RA mesafesinde bulunan noktanın hareket parametrelerini belirleyelim (Şekil 11.6, 11.7). Yol
Çözüm
1. Bölüm 1 - düzensiz hızlandırılmış hareket, ω \u003d φ '; ε = ω’ 2. Bölüm 2 - hız sabittir - hareket tekdüzedir, . ω = sabit 3.
Temel tanımlar
Karmaşık bir hareket, birkaç basit harekete ayrılabilen bir harekettir. Basit hareketler öteleme ve dönmedir. Noktaların karmaşık hareketini dikkate almak
Katı bir cismin düzlemsel paralel hareketi
Düzlem-paralel veya düz, katı bir cismin, cismin tüm noktalarının, söz konusu referans çerçevesindeki sabit bir noktaya paralel hareket ettiği böyle bir hareketidir.
öteleme ve dönme
Düzlem-paralel hareket iki harekete ayrılır: belirli bir kutupla birlikte öteleme ve bu direğe göre dönme. Ayrışma belirlemek için kullanılır
hızların merkezi
Vücudun herhangi bir noktasının hızı, anlık hız merkezi kullanılarak belirlenebilir. Bu durumda, karmaşık bir hareket, farklı merkezler etrafında bir dönme zinciri olarak temsil edilir. Bir görev
dinamik aksiyomları
Dinamik yasaları, sayısız deney ve gözlemin sonuçlarını özetler. Genellikle aksiyom olarak kabul edilen dinamik yasaları Newton tarafından formüle edilmiştir, ancak birinci ve dördüncü yasalar da
Sürtünme kavramı. Sürtünme türleri
Sürtünme, bir kaba cisim diğerinin yüzeyi üzerinde hareket ettiğinde ortaya çıkan dirençtir. Cisimler kayarken kayma sürtünmesi, yuvarlanma sırasında yuvarlanma sürtünmesi oluşur. Direncin doğası
yuvarlanma sürtünmesi
Yuvarlanma direnci, zeminin ve tekerleğin karşılıklı deformasyonu ile ilgilidir ve kayma sürtünmesinden çok daha azdır. Genellikle zemin tekerlekten daha yumuşak kabul edilir, daha sonra toprak esas olarak deforme olur ve
Ücretsiz ve ücretsiz olmayan noktalar
Uzayda hareketi herhangi bir kısıtlama ile sınırlandırılmayan maddi bir noktaya serbest denir. Problemler, dinamiğin temel kanunu kullanılarak çözülür. Malzeme o zaman
eylemsizlik kuvveti
Atalet, kişinin durumunu değişmeden tutma yeteneğidir; bu, tüm maddi bedenlerin içsel bir özelliğidir. Atalet kuvveti - cisimleri hızlandırırken veya frenlerken oluşan kuvvet
Çözüm
Aktif kuvvetler: itici güç, sürtünme kuvveti, yerçekimi kuvveti. R desteğindeki tepki. Eylemsizlik kuvvetini ivmeden zıt yönde uygularız. D'Alembert ilkesine göre, platforma etki eden kuvvetler sistemi
Ortaya çıkan kuvvetin işi
Bir kuvvetler sisteminin etkisi altında, m kütleli bir nokta M1 konumundan M2 konumuna hareket eder (Şekil 15.7). Bir kuvvetler sisteminin etkisi altındaki hareket durumunda,
Güç
İşin performansını ve hızını karakterize etmek için güç kavramı tanıtıldı. Güç, birim zamanda yapılan iştir:
Dönen güç
Pirinç. 16.2 Cisim, M1 noktasından M2 noktasına bir yarıçap yayı boyunca hareket eder M1M2 = φr Kuvvet işi
Yeterlik
İş yapan her makine ve mekanizma, zararlı dirençlerin üstesinden gelmek için enerjinin bir kısmını harcar. Böylece, makine (mekanizma), faydalı işlere ek olarak, ayrıca ek bir işlem gerçekleştirir.
Momentumdaki değişimle ilgili teorem
Maddi bir noktanın momentumu, noktanın kütlesi ile hızının mv çarpımına eşit bir vektör miktarıdır. Momentum vektörü ile çakışıyor
Kinetik enerji değişim teoremi
Enerji, bir cismin mekanik iş yapabilme yeteneğidir. iki form var mekanik enerji: potansiyel enerji veya konum enerjisi ve kinetik enerji,
Maddi noktalar sisteminin dinamiğinin temelleri
Toplama maddi noktalar etkileşim kuvvetleriyle birbirine bağlanan, mekanik bir sistem olarak adlandırılır. Mekanikte herhangi bir malzeme gövdesi mekanik olarak kabul edilir.
Dönen bir cismin dinamiğinin temel denklemi
Açısal bir hızla dış kuvvetlerin etkisi altında katı bir cismin Oz ekseni etrafında dönmesine izin verin.
Gerilim
Bölüm yöntemi, bölümdeki iç kuvvet faktörünün değerini belirlemenize izin verir, ancak dağıtım yasasını oluşturmayı mümkün kılmaz. Iç kuvvetler bölüme göre. n'nin gücünü değerlendirmek için
İç kuvvet faktörleri, gerilmeler. çizim
Boyuna kuvvetler, kesitlerdeki normal gerilmeler hakkında fikir sahibi olun. Boyuna kuvvetlerin ve normal gerilmelerin diyagramlarını oluşturma kurallarını, dağılım kanununu bilir.
boyuna kuvvetler
Eksen boyunca dış kuvvetlerle yüklü bir kiriş düşünün. Kiriş duvara sabitlenir ("gömme" sabitlemesi) (Şekil 20.2a). Kirişi yükleme bölümlerine ayırıyoruz. ile yükleme alanı
Düz bölümlerin geometrik özellikleri
hakkında bir fikriniz olsun fiziksel duyu ve ana merkezi eksenler ve ana merkezi atalet momentleri hakkında eksenel, merkezkaç ve kutupsal atalet momentlerini belirleme prosedürü.
Kesit alanının statik momenti
Keyfi bir bölüm düşünün (Şekil 25.1). Kesiti sonsuz küçük alanlara bölersek dA ve her alanı koordinat eksenine olan mesafe ile çarparsak ve elde edileni entegre edersek
merkezkaç atalet momenti
Bir bölümün merkezkaç atalet momenti, her iki koordinat tarafından toplam alan tarafından alınan temel alanların ürünlerinin toplamıdır:
Eksenel atalet momentleri
Aynı düzlemde bulunan bir yarda kesitin eksenel atalet momenti, tüm alan üzerinde alınan uzaklıklarının karesi başına elemanter alanların çarpımlarının toplamıdır.
Bölümün polar atalet momenti
Belirli bir noktaya (kutup) göre bir bölümün kutupsal eylemsizlik momenti, tüm alan üzerinde alınan temel alanların çarpımlarının toplamı ve bu noktaya olan uzaklıklarının karesidir:
En basit bölümlerin eylemsizlik momentleri
eksenel momentler dikdörtgen atalet (Şekil 25.2) Doğrudan hayal edin
Bir dairenin polar atalet momenti
Bir daire için önce polar atalet momenti, sonra eksenel olanlar hesaplanır. Bir daireyi sonsuz ince halkalardan oluşan bir set olarak hayal edin (Şekil 25.3).
burulma deformasyonları
Yuvarlak bir kirişin burulması, uzunlamasına eksene dik düzlemlerde momentlere sahip kuvvet çiftleri tarafından yüklendiğinde meydana gelir. Bu durumda, kiriş generatrisi bükülür ve bir γ açısıyla döndürülür,
burulma hipotezleri
1. Düz kesitler hipotezi yerine getirilmiştir: düz ve uzunlamasına eksene dik olan kiriş kesiti, deformasyondan sonra düz ve uzunlamasına eksene dik kalır.
Burulmada iç kuvvet faktörleri
Burulma, kiriş - torkun kesitinde sadece bir iç kuvvet faktörünün ortaya çıktığı yükleme olarak adlandırılır. Dış yükler de iki profesyonel
Tork Grafikleri
Torklar, kirişin ekseni boyunca değişebilir. Kesitler boyunca momentlerin değerlerini belirledikten sonra, çubuğun ekseni boyunca bir tork grafiği oluşturuyoruz.
burulma gerilmeleri
Kirişin yüzeyine uzunlamasına ve enine çizgilerden oluşan bir ızgara çiziyoruz ve Şekil 1'den sonra yüzeyde oluşan deseni düşünüyoruz. 27.1a deformasyonu (Şekil 27.1a). Pop
Maksimum burulma gerilmeleri
Gerilmeleri belirleme formülünden ve burulma sırasındaki kayma gerilmelerinin dağılımının diyagramından, yüzeyde maksimum gerilmelerin meydana geldiği görülebilir. Maksimum voltajı belirleyin
Mukavemet hesaplama türleri
İki tür dayanım hesabı vardır 1. Tasarım hesabı - Kirişin (şaftın) tehlikeli bölümdeki çapı belirlenir:
rijitlik hesabı
Sertliği hesaplarken, deformasyon belirlenir ve izin verilen ile karşılaştırılır. Bir t momentine sahip bir dış kuvvet çiftinin etkisi altında yuvarlak bir çubuğun deformasyonunu düşünün (Şekil 27.4).
Temel tanımlar
Bir bükülme, kirişin enine kesitinde bir iç kuvvet faktörünün ortaya çıktığı bir yükleme türüdür - bir bükülme momenti. üzerinde çalışan bar
Bükmede iç kuvvet faktörleri
Örnek 1. Üzerine bir t momenti ile bir çift kuvvetin etki ettiği bir kiriş düşünün ve dış güç F (Şekil 29.3a). İç kuvvet faktörlerini belirlemek için yöntemi şu şekilde kullanırız:
Eğilme tarzları
Kesitteki enine kuvvet, ekseni döndürme eğilimindeyse pozitif kabul edilir.
Doğrudan enine bükme için diferansiyel bağımlılıklar
Kesme kuvvetleri ve eğilme momentlerinin diyagramlarının oluşturulması, eğilme momenti, kesme kuvveti ve düzgün yoğunluk arasındaki diferansiyel ilişkiler kullanıldığında büyük ölçüde basitleştirilmiştir.
Bölüm yöntemi Ortaya çıkan ifade genelleştirilebilir
İncelenen kesitteki enine kuvvet, söz konusu kesite kadar kirişe etkiyen tüm kuvvetlerin cebirsel toplamına eşittir: Q = ΣFi
Gerilim
Sağa sıkıştırılmış ve konsantre bir F kuvveti ile yüklenmiş bir kirişin bükülmesini düşünün (Şekil 33.1).
Bir noktadaki stres durumu
Bir noktadaki gerilme durumu, içinden geçen tüm alanlarda (kesitlerde) ortaya çıkan normal ve kesme gerilmeleri ile karakterize edilir. verilen nokta. tanımlamak genellikle yeterlidir.
Karmaşık bir deforme durum kavramı
Bir noktadan geçen farklı düzlemlerde ve farklı yönlerde meydana gelen gerinimler kümesi, o noktadaki deforme durumu belirler. karmaşık deformasyon
Burulma ile bükme için yuvarlak çubuğun hesaplanması
Eğilme ve burulma etkisi altında yuvarlak bir çubuğun hesaplanması durumunda (Şekil 34.3), her iki durumda da maksimum gerilme değerleri meydana geldiğinden, normal ve kesme gerilmelerini hesaba katmak gerekir.
Kararlı ve kararsız denge kavramı
Nispeten kısa ve büyük çubuklar sıkıştırmaya dayanır, çünkü. tahribat veya kalıntı deformasyonlar nedeniyle başarısız olurlar. Eylem altında küçük kesitli uzun çubuklar
Sürdürülebilirlik hesaplaması
Stabilite hesaplaması, izin verilen sıkıştırma kuvvetinin ve buna kıyasla hareket eden kuvvetin belirlenmesinden oluşur:
Euler formülü ile hesaplama
Kritik kuvveti belirleme sorunu, 1744'te L. Euler tarafından matematiksel olarak çözüldü. Her iki tarafa menteşeli bir çubuk için (Şekil 36.2), Euler formülü şu şekildedir:
Kritik stresler.
Kritik stres, kritik kuvvete karşılık gelen sıkıştırma gerilimidir. Basınç kuvvetinden kaynaklanan stres, formülle belirlenir.
Euler formülünün uygulanabilirlik sınırları
Euler formülü sadece elastik deformasyon sınırları içinde geçerlidir. Bu nedenle kritik gerilme, malzemenin elastik sınırından daha az olmalıdır. Önceki
Kuvvetin başlangıç ve bitiş izdüşümleri arasına alınmış, karşılık gelen işaretle alınan parçanın uzunluğuna eşit bir skaler değere, kuvvetin eksen üzerindeki izdüşümü denir.
Baştan sona hareket eksenin pozitif yönünde gerçekleşirse projeksiyon artı işaretine, negatif yönde ise eksi işaretine sahiptir.
Böylece, belirli bir kuvvetin herhangi bir paralel ve eşit yönlendirilmiş eksen üzerindeki izdüşümleri birbirine eşittir.
Kuvvetin Ox ekseni üzerindeki izdüşümü şu şekilde gösterilir (Şekil 12 ![]() ).
).
Şekil 12'yi ve tanımı takiben, şunu elde ederiz:
Yani, kuvvetin eksen üzerindeki izdüşümü, kuvvet modülünün çarpımına ve kuvvetin yönü ile eksenin pozitif yönü arasındaki açının kosinüsüne eşittir.
Bir kuvvet bir eksene dik ise, o eksen üzerindeki izdüşümü sıfırdır.
Kuvvetin Oksi düzlemi üzerindeki izdüşümü, bu düzlemdeki F kuvvetinin başlangıcı ve bitişinin izdüşümleri arasında yer alan vektördür (Şekil 13).  ).
).
Bir kuvvetin bir düzlem üzerine izdüşümü bir vektör miktarıdır ve hem modül hem de Oksi düzlemindeki yön ile karakterize edilir. Oksi düzlemine kuvvet projeksiyonunun modülü şu şekilde ifade edilir:
Ardından Ox ve Oy eksenlerindeki projeksiyonlar:
Oxyz koordinat sistemini seçiyoruz. Modülü ve vektör ile karşılık gelen eksenler arasındaki açıları bilerek bir vektör oluşturulabilir (Şekil 14).  ).
).
Bu miktarların atanması kuvveti belirler. Kuvvet uygulama noktası ayrıca x, y, z koordinatlarıyla belirtilmelidir. Ayrıca kuvvet, eksenler üzerindeki izdüşümlerle belirlenebilir. O zamanlar
Bu formüller, kuvvetin koordinat eksenleri üzerindeki izdüşümlerini bilerek, modülünü ve eksenlerle olan açılarını, yani. gücü belirler. İzdüşümleri bilerek, geometrik olarak bir vektör oluşturabilirsiniz.
Bir düzlem için formül (2.2.1) ve (2.2.2) yazılır.

Düzlemdeki yapı, statiğin 4. aksiyomuna göre yapılır.
Şimdi kuvvetleri toplamanın analitik yöntemini ele alalım. Vektörler ve izdüşümleri arasındaki ilişki aşağıdaki teorem ile verilmektedir:
Toplam vektörün bir eksen üzerindeki izdüşümü, vektörlerin terimlerinin aynı eksen üzerindeki izdüşümlerinin cebirsel toplamına eşittir (Şekil 15).  ).
).

Bu ilişkiler, kuvvetleri analitik olarak eklemeyi mümkün kılar. (2.2.1)-(2.2.4) ve (2.2.9)-(2.2.11) formüllerinin özdeşliği fark edilebilir.
Statikteki problemlerin çözümü genellikle vektör cebirinden toplama işlemi ile ilişkilendirilir. Eski hileleri hatırlayalım ve bazı tanımları sunalım.
Herhangi bir sistemin kuvvetlerinin geometrik toplamına eşit olan niceliğe denir. ana vektör sistemler.
Kuvvetlerin geometrik toplamı bileşke ile karıştırılmamalıdır. Birçok kuvvet sistemi için sonuç yoktur ve ana vektör herhangi biri için hesaplanabilir.
Bir düzlemde iki kuvvetin toplanmasını düşünün. Kuvvetlerin geometrik toplamı, bir kuvvet üçgeni oluşturularak paralelkenar kuralına göre bulunur (Şekil 16).  ).
).
Sonucun R modülü üçgenin kenarı olarak tanımlanır:
açılar sinüs teoremi tarafından bulunur, ![]() , alırız
, alırız
![]()
Kuvvetleri toplamanın geometrik yönteminin devamında, bu düzlemde yer almayan üç kuvvetin toplanmasını hatırlıyoruz.
Aynı düzlemde yer almayan üç kuvvetin geometrik toplamı, bu kuvvetler üzerine inşa edilmiş bir paralel borunun köşegeni ile gösterilmektedir (Şekil 17).  ).
).
Burada, sırasıyla ve 'nin rol oynadığı Şekil 14 ve 17'nin tam analojisini vurgulamak gerekir. Buna göre (2.2.1-2.2.4) formüllerini kullanabiliriz.
Düz bir yakınsak kuvvetler sistemi göz önüne alındığında, böyle bir kuvvetler sisteminin konumunu dikkate almak gerekir.
Herhangi bir kuvvet sisteminin geometrik toplamı (temel vektör), bir kuvvet poligonunun oluşturulması veya sistemin kuvvetlerinin ardışık eklenmesi ile belirlenir. sistem olsun ![]() yakınsak kuvvetler (Şekil 18
yakınsak kuvvetler (Şekil 18  ).
).
Bir kuvvet çokgeni oluşturmak için, rastgele bir O noktası seçin ve başlangıcı ona taşıyın, ardından başlangıcı vektörün sonuna taşıyın, vb. vektörün transferinden sonra, vektörün sonu bir N noktasında olacaktır. O ve N noktalarını bir vektörle birleştiriyoruz. Bu kapanış vektörü, sistemin ana vektörü olacaktır.
Art arda kuvvetlerin eklenmesiyle (Şekil 18, a), hepsi eylem çizgileri boyunca kesişme noktası A'ya aktarılır. Tutarlı bir şekilde, paralelkenar kuralına göre kuvvetler eklenir, vektör elde edilir:

tüm kuvvetlerin ana vektörüne eşit olan ve bunların kesişme noktasında uygulanan bileşkedir.
Aynı düzlemde bulunan, birbirine paralel olmayan, karşılıklı olarak dengelenmiş üç kuvvetin etki çizgileri bir noktada kesişir.
Güç verilebilir. Aynı düzlemde oldukları ve paralel olmadıkları için hareket çizgileri bir O noktasında kesişecektir.Bu noktada kuvvetler uygularız ve bunları ortaya çıkan ile değiştiririz.O zaman iki kuvvet vardır ve O noktasında uygulanır (Şekil 19).  ).
).
Vücut dengedeyse, o zaman, 1. statik teoremine göre ve bir düz çizgi boyunca biriktirilmelidir, yani. . Dolayısıyla A noktasından geçer. İspat edilmesi gereken de buydu.
Teorem, üç kuvvetin etkisi altındaki serbest bir katı cisim için denge koşulunun gerekli ancak yetersiz bir kanıtıdır.
Tanımlandığı gibi, yakınsak kuvvetler, etki çizgileri bir noktada kesişen kuvvetlerdir. Üç kuvvet üzerindeki teoremi ve kuvvetlerin paralelkenarı aksiyomunu dikkate alarak, yakınsak kuvvetler sisteminin, bu kuvvetlerin geometrik toplamına (temel vektör) eşit bir bileşiğe sahip olduğunu ve bunların kesişme noktasında uygulandığını buluyoruz. Sonucun yapısı veya tanımı bu bölümün 2. paragrafında yapılmıştır (bakınız formül 2.3.3, 2.3.4).
Sonucu belirledikten sonra, bir yakınsak kuvvetler sisteminin etkisi altında serbest bir katı cisim için denge koşullarının belirlenmesine geçebiliriz.
Dengeli bir kuvvet sistemi bir cisme etki ediyorsa, cisim hareketsizdir veya atalet ile hareket eder.
Katı bir cisme uygulanan yakınsak kuvvetler sisteminin dengesi için bu kuvvetlerin bileşkesinin sıfıra eşit olması gerekli ve yeterlidir. Bu kuvvetlerin karşılaması gereken koşullar, geometrik veya analitik biçimde ifade edilebilir.
1) Geometrik denge koşulu.
Yakınsak kuvvetlerin bileşkesi, kuvvet poligonunun kapanış vektörü olarak tanımlandığından, poligon kapandığında kaybolabilir. Yani yakınsak kuvvetler sisteminin dengesi için bu kuvvetlerden oluşturulan kuvvet poligonunun kapalı olması gerekli ve yeterlidir.
2) Analitik denge koşulları. Analitik olarak, sonuç şu şekilde tanımlanır:
Pozitif sayıların toplamı kökün altında olduğundan, ancak ve ancak aynı anda olması durumunda R sıfıra eşit olacaktır.
yani eşitlikler
Bunlar, bir yakınsak kuvvetler sisteminin etkisi altında serbest bir katı cismin dengesi için koşullardır.
Bir uzaysal yakınsak kuvvetler sisteminin dengesi için, bu kuvvetlerin koordinat eksenleri üzerindeki izdüşümlerinin toplamının sıfıra eşit olması gerekli ve yeterlidir.
Düz bir yakınsak kuvvetler sistemi için, denklemler (2.5.3) aşağıdakine indirgenir:
![]()
İle birlikte ilerici hareket katı bir cisim bir merkez (nokta) etrafında dönebilir.
Dönme, bir kuvvet momenti ile karakterize edilir.
Kuvvetin A noktasına uygulanmasına izin verin. Cismi sabit O merkezi etrafında döndürme eğilimindedir (Şekil 20).  ). O noktasından kuvvetin etki çizgisine indirilen h dikine, kuvvetin O merkezine göre omzu denir.
). O noktasından kuvvetin etki çizgisine indirilen h dikine, kuvvetin O merkezine göre omzu denir.
Kuvvetin uygulama noktası, kuvvetin etki çizgisi boyunca hareket ettirilebildiğinden, cismin dönüşü şunlara bağlı olacaktır:
1) kuvvet modülü ve omuz h.
2) OAB düzleminin konumları,
Tüm kuvvetler sistemi tek bir düzlemde olsun, o zaman yön bir işaret ile karakterize edilebilir. Kuvvet momentinin aşağıdaki tanımını veriyoruz:
O merkezi etrafındaki kuvvet momentine, uygun işaretle alınan kuvvet modülü ile kolun uzunluğunun çarpımına eşit bir değer denir.
Kuvvet momenti şu şekilde gösterilir:
Kuvvet cismi saat yönünün tersine döndürmeye çalışırsa artı işaretini seçeriz, aksi takdirde eksi işaretini alırız.
Ölçü birimleri: (metre başına Newton), (metre başına kilogram).
Kuvvet momentinin özellikleri:
1) kuvvet uygulama noktası hareket hattı boyunca aktarıldığında kuvvet momenti değişmeyecektir;
2) kuvvet momenti, ancak ve ancak kuvvet sıfıra eşitse veya hareket çizgisi O merkezinden geçiyorsa sıfıra eşittir. (h = 0).
3) kuvvet momenti, OAB üçgeninin alanının iki katına sayısal olarak eşittir.
Herhangi bir merkeze göre yakınsak kuvvetlerin bileşke düz sisteminin momenti, aynı merkeze göre kuvvetlerin terimlerinin momentlerinin cebirsel toplamına eşittir.
kuvvetler sistemini düşünün ![]() A noktasında birleşen (Şek. 21
A noktasında birleşen (Şek. 21  ).
).




 Английский вокруг нас исследовательская работа")
