Llojet e çifteve kinematike. Shihni se çfarë është "çifti kinematik" në fjalorë të tjerë
Një çift kinematik është një lidhje e lëvizshme e dy lidhjeve të njëpasnjëshme që u siguron atyre një lëvizje të caktuar relative. Elementet e një çifti kinematik janë një grup Sipërfaqesh vijash ose pikash përgjatë të cilave ndodh një lidhje e lëvizshme e dy lidhjeve dhe që formojnë një çift kinematik. Që një çift të ekzistojë, elementët e lidhjeve të tij përbërëse duhet të jenë në kontakt të vazhdueshëm T.
Një shembull i një nyje të tillë është nyja e hipit. Ka edhe nyje të dy shkallëve të lirisë ose një shkallë lirie. Për shkak të lëvizshmërisë së tyre, zinxhirët ndahen në: të ngurtë, normalë dhe të lirshëm. Zinxhiri i fortë është një rast të veçantë Vetë emri është një lloj oksimoroni. Duhet të merremi me një zinxhir kinematik që nuk lëviz! Përdoret në strukturat e ndërtimit dhe nuk është subjekt i interesit në mekanikë. Zinxhiri kinematik më i përdorur është zinxhiri i drejtë.
Në një zinxhir të tillë, lëvizja e një elementi ndikon në lëvizjen e të gjithë elementëve të tjerë të sistemit. Pastaj aplikohet zinxhiri i lirë. Një shembull i një zinxhiri të lirë është një kuti ingranazhi, një kuti ingranazhi e përbërë nga ingranazhe në të cilat një ose më shumë rrota nuk kanë një bosht fiks rrotullimi.
Ndani punën në rrjetet sociale
Nëse kjo punë nuk ju përshtatet, ekziston një listë me vepra të ngjashme në fund të faqes. Ju gjithashtu mund të përdorni butonin e kërkimit
Leksioni 2
Cilido qoftë mekanizmi i makinës, ai gjithmonë përbëhet nga lidhje dhe çifte kinematike.
Kushtet e lidhjes të vendosura në mekanizmat në lidhjet lëvizëse, në teorinë e makinave dhe mekanizmave Është zakon të quhen çifte kinematike.
Aktualisht, zinxhirët kinematikë përdoren për të përshkruar shumë sisteme komplekse lëvizjes. Kjo vlen veçanërisht për robotikën. Për shembull, lëvizja e një manipuluesi, domethënë një pjesë e një roboti që mund të kryejë disa funksione të dorës së njeriut, përshkruhet si një zinxhir kinematik i përbërë nga elementë dhe lidhje lëvizëse ndërmjet tyre, të referuara në robot në formën të lidhësve ose menteshave. Por koncepti i një zinxhiri kinematik përdoret gjithashtu në përshkrimin e lëvizjes së trupit të njeriut. Një zinxhir kinematik përkufizohet këtu si një kombinim i disa nyjeve të njëpasnjëshme që përbëjnë një sistem lëvizjeje.
Çift kinematikquhet një lidhje e lëvizshme e dy hallkave të ngjitura, duke u siguruar atyre një lëvizje të caktuar relative.
Në tabelë. 2.1 tregon emrat, vizatimet, simbolet e çifteve kinematike më të zakonshme në praktikë, si dhe klasifikimin e tyre.
Lidhjet, kur kombinohen në një palë kinematike, mund të vijnë në kontakt me njëra-tjetrën përgjatë sipërfaqeve, vijave dhe pikave.
Zakonisht ky është një zinxhir i rregullt dhe i thjeshtë. Pellgjet, siç mund të shihet këtu, janë çifte kinematike, dhe kockat janë elementët e fiksuar të zinxhirit. Biomekanika njerëzore prezanton gjithashtu ndarjen e zinxhirëve kinematikë në të hapur dhe të mbyllur. Në një qark të mbyllur, linja fundore e tij nuk është e lirë. Ekzistojnë dy kinematikë të mbyllura në trupin e njeriut - gjoks dhe legen. Nga ana tjetër, një zinxhir i hapur kinematik është ai në të cilin lidhja e fundit është e lirë dhe lidhet vetëm me një lidhje ngjitur.
Shumica e lëvizjeve të kryera nga gjymtyrët lejojnë hapjen e objektivave, sepse ato kanë një krah ose këmbë të zjarrtë në skajet e tyre. Nga ana tjetër, shumë prej veprave të kryera Trupi i njeriut kërkojnë gjithashtu tokëzim. Për shembull, kur tërhiqni këmbën e një litari, muskujt e kofshës dhe toka nën këmbë mund të konsiderohen një lloj qarku i mbyllur që lejon që vija të lëvizë përgjatë tokës.
Elementet e një çifti kinematikata quajnë një grup Sipërfaqesh, vijash ose pikash përgjatë të cilave ndodh një lidhje e lëvizshme e dy lidhjeve dhe që formojnë një çift kinematik. Në varësi të llojit të kontaktit të elementeve të çifteve kinematike, ekzistojnë lart e më poshtë çiftet kinematike.
Çiftet kinematike, të formuara nga elementë në formë të drejtëzës ose pikës, quhen më i lartë.
Çifti biokinetik formon elemente dhe nyje të ngurtë të ngurtë. Shkalla e lirisë quhet lëvizje e pavarur në bashkim, dhe numri i shkallëve të lirisë quhet numri i përgjithshëm i lëvizjeve të pavarura relative të trupit të ngurtë. Trupi i ngjitur ka 6 shkallë lirie: mund të kryejë 3 lëvizje rrotulluese rreth 3 boshteve dhe 3 lëvizje progresive përgjatë tyre. Nuk mund të ketë më shumë se 5 gradë lirie. Kur lëvizja relative e elementeve është më e vogël se 5 gradë ose 1-3 mm, atëherë kombinimi konsiderohet si një lojë dhe jo një çift kinematik.
Quhen çiftet kinematike të formuara nga elementet në formë sipërfaqesh më të ulëta.
Që një çift të ekzistojë, elementët e lidhjeve të tij përbërëse duhet të jenë në kontakt të vazhdueshëm, d.m.th. të jetë i mbyllur. Mbyllja e çifteve kinematike mund të jetëgjeometrikisht ose me forcë, Për shembull, me ndihmën e masës së vet, sustave, etj.
Klasa e çiftit kinematik përcakton një numër që është diferenca midis numri maksimal shkallët e lirisë së një anëtari dhe numri i shkallëve të lirisë së një përbërjeje të caktuar. Tek njerëzit, vetëm lëvizjet rrotulluese janë të mundshme në sistemin kockor-artikular. Ky është rezultat i një veprimi të njëanshëm të muskujve që mund të tërheqë dhe nuk mund të shtyjë. Nyjet sferike dhe acetabulare kanë tre shkallë lirie. Zinxhiri biokistik është një grup koherent elementësh të lidhur nga çifte çiftesh biokinetike. Qarku mund të jetë i hapur ose i mbyllur.
Ne flasim për një zinxhir të hapur kur lidhja e fundit është e lirë, mund të jetë, për shembull, një gisht. Manipuluesit dhe robotët industrialë më së shpeshti kanë një zinxhir të hapur kinematik. Këta zinxhirë përbëhen nga disa lidhje aktive që lejojnë lëvizjen hapësinore dhe orientimin e majës së punës, domethënë të efektorit.
Forca, rezistenca ndaj konsumit dhe qëndrueshmëria e çifteve kinematike varen nga lloji dhe dizajni i tyre. Çiftet e poshtme janë më rezistente ndaj konsumit sesa ato më të lartat. Kjo shpjegohet me faktin se në çiftet e poshtme, kontakti i elementeve të çifteve ndodh përgjatë sipërfaqes, dhe për këtë arsye, me të njëjtën ngarkesë, lindin presione specifike më të ulëta në të sesa në atë më të lartë. Veshja, ceteris paribus, është proporcionale me presionin specifik, dhe për këtë arsye çiftet më të ulëta konsumohen më ngadalë se ato më të lartat. Prandaj, për të reduktuar konsumin në makina, preferohet përdorimi i çifteve më të ulëta, megjithatë, shpesh përdorimi i çifteve më të larta kinematike bën të mundur thjeshtimin e ndjeshëm të diagrameve strukturore të makinave, gjë që zvogëlon dimensionet e tyre dhe thjeshton dizajnin. Prandaj, zgjedhja e saktë e çifteve kinematike është një problem kompleks inxhinierik.
Numri i shkallëve të lirisë është numri i pozicioneve të ndryshueshme që duhet të specifikohen për të përcaktuar në mënyrë unike rregullimin hapësinor. Për të përcaktuar numrin e shkallëve të lirisë, përdorni formulën. Bazuar në formulën e mësipërme, numri i shkallëve të lirisë përcaktohet për disa manipulues të thjeshtë.
Duke përdorur ekuacionin, numri i shkallëve të lirisë vendoset i barabartë. Që manipuluesi të ketë katër shkallë lirie, përdorni katër disqe, siç tregohet në fig. Përdorni 5 aktivizues, siç tregohet në figurën 7, që manipuluesi të kryejë detyra të caktuara.
Çiftet kinematike ndahen gjithashtu menumri i shkallëve të lirisë(lëvizshmëri), të cilat i vë në dispozicion lidhjeve të lidhura nëpërmjet tij, osenumri i kushteve të lidhjes(klasa në çift), imponuar nga çifti në lëvizjen relative të lidhjeve të lidhura. Kur përdorin një klasifikim të tillë, zhvilluesit e makinerive marrin informacion në lidhje me lëvizjet e mundshme relative të lidhjeve dhe për natyrën e ndërveprimit të faktorëve të forcës midis elementeve të një çifti.
Meqenëse është e lehtë të vëzhgosh numrin e shkallëve të lirisë së një zinxhiri të hapur kinematik, ai është i barabartë me numrin e çifteve kinematike të klasave të pesta rrotulluese dhe rrëshqitëse. Në rastin e çifteve kinematike të ndryshme nga baballarët, shablloni duhet të zbatohet në përputhje me rrethanat, ose të gjitha çiftet kinematike me thembra rrotulluese ose rrëshqitëse duhet të zëvendësohen.
Ka disa mënyra për të zgjidhur këtë problem: ju mund të zëvendësoni bashkimin e topit me tre nyje rrotulluese me zhvendosje zero, ose mund të zëvendësoni një çift kinematik të përshtatshëm për vizatimin. Siç mund ta shihni nga llogaritjet e DOF, 6 aktivizues duhet të aplikohen në komponentë individualë siç tregohet në fig.
Një lidhje falas që është në rastin e përgjithshëm në M - hapësirë dimensionale, duke lejuar P Llojet e lëvizjeve më të thjeshta, ka një sërë shkallësh lirie! ( H) ose W - të lëvizshme.
Pra, nëse lidhja është në hapësirën tre-dimensionale, duke lejuar gjashtë lloje lëvizjesh të thjeshta - tre rrotulluese dhe tre përkthimore rreth dhe përgjatë boshteve X, V, Z , atëherë themi se ka gjashtë shkallë lirie, ose ka gjashtë koordinata të përgjithësuara, ose është gjashtë-lëvizshme. Nëse lidhja është në një hapësirë dy-dimensionale që lejon tre lloje lëvizjesh të thjeshta - një rrotullim përreth Z dhe dy përkthimore përgjatë akseve X dhe Y , pastaj thonë se ka tre shkallë lirie, ose tre koordinata të përgjithësuara, ose është tre lëvizshme etj.
Më poshtë janë diagramet e manipuluesve me një numër të caktuar të shkallëve të lirisë për introspeksion. Komponentët kinematikë që përbëjnë një çift kinematik me një makinë të bashkangjitur, të cilat lejojnë lëvizjen e çifteve kinematike relative për të formuar një bllok lëvizjeje.
Blloku kinematik i manipulatorit krijon mekanizmi kinematik me disqe të bashkangjitur. Mekanizmi i makinës së manipulimit përcakton dy parametra kinematikë. Lëvizshmëria - numri i shkallëve të lirisë së zinxhirit kinematik të mekanizmit të imobilizuar - baza; manovrueshmëria - numri i shkallëve të lirisë së zinxhirit kinematik të një mekanizmi fiks: elementi është baza dhe elementi është i fundit në zinxhirin kinematik. I pari nga këta parametra tregon numrin e lidhjeve që duhet të vendosen në mekanizëm për ta imobilizuar plotësisht atë.
Tabela 2.1
Kur lidhjet kombinohen duke përdorur çifte kinematike, ato humbasin shkallët e tyre të lirisë. Kjo do të thotë që çiftet kinematike imponohen në lidhjet që lidhen me një numër S.
Në varësi të numrit të shkallëve të lirisë që lidhjet e kombinuara në një çift kinematik kanë në lëvizje relative, përcaktoni lëvizshmërinë e çiftit ( W = H ). Nëse H është numri i shkallëve të lirisë së lidhjeve të çiftit kinematik në lëvizje relative, te Lëvizshmëria e çiftit përcaktohet si më poshtë:
Në mënyrë të ngjashme, por pas imobilizimit shtesë të elementit të fundit të lirë, ai përcakton lirinë e lëvizjes së mekanizmit, kur, për shembull, doreza ose mjeti i njësisë kinematike zë një pozicion të përcaktuar saktësisht. Përveç parametrave sintetikë si lëvizshmëria dhe numrat e manovrimit, mekanizmi i njësisë kinematike të një manipuluesi përshkruhet nga vetitë e tij të përgjithshme gjeometrike, d.m.th., e ashtuquajtura struktura kinematike e treguar për manipuluesin shembullor në Fig.
Sipas konceptit të strukturës kinematike, një zinxhir ose mekanizëm përkufizohet si përkufizimi i një diagrami kinematik në formën e një skice, duke përdorur emrat e anëtarëve dhe çiftet kinematike. Shumë shpesh, kur struktura e manipulatorit është komplekse, është e mundur të përfaqësohet struktura kinematike në hapësirën tredimensionale, siç tregohet në Fig. 11 për manipuluesin e ilustruar të paraqitur në Fig.
ku P - lëvizshmëria e hapësirës në të cilën ekziston çifti në shqyrtim; S - numri i obligacioneve të vendosura nga çifti.
Duhet të theksohet se lëvizshmëria e një çifti W , i përcaktuar nga (2.1), nuk varet nga lloji i hapësirës në të cilën zbatohet, por vetëm nga ndërtimi.
Për shembull, një çift rrotullues (përkthyes) (shih tabelën 2.1), si në hapësirën me gjashtë ashtu edhe në tre lëvizje, do të mbetet ende i lëvizshëm, në rastin e parë do t'i vendosen 5 lidhje, dhe në rastin e dytë - 2 lidhje, dhe kështu do të kemi, përkatësisht:
Struktura e njësisë kinematike, së bashku me përshkrimin e dimensioneve të diagramit kinematik dhe gamën e lëvizjes së lëvizësve, përcakton qartë lëvizjen e mekanizmit dhe kapjen ose lëvizjen e mjetit që rezulton. Për arsye operacionale, kjo hapësirë përshkruhet në mënyrë të pavarur nga skica dimensionale edhe nga vëllimi. Fushat e mëposhtme janë të theksuara në hapësirën e punës.
Për shembull, për strukturën e manipuluesit të paraqitur në Fig. 10, hapësira kryesore e punës është paraqitur në fig. Hapësirat e punës dhe të përplasjes ndahen në: mekanike dhe drejtuese. Hapësirat mekanike rrjedhin nga vetitë strukturore të njësisë kinematike me korrelacione që lindin, për shembull, nga përmbledhja në lidhje, deformimet statike dhe dinamike, etj. këto hapësira janë zakonisht më të mëdha se hapësirat nominale të përcaktuara në bazë të gjeometrisë së ingranazhit. Hapësirat e kontrollit përfshijnë kufijtë e kontrollit që lidhen me vetitë e sistemeve të matjes së zhvendosjes, kufizimet e përpunimit dhe vetë sistemin e kontrollit, siç janë kufijtë e diapazonit të kontrollit të servo.
për hapësirë me gjashtë lëvizje:
për një hapësirë me tre lëvizje:
Siç mund ta shihni, lëvizshmëria e çifteve kinematike nuk varet nga karakteristikat e hapësirës, gjë që është një avantazh i këtij klasifikimi. Përkundrazi, ndarja e shpeshtë e çifteve kinematike në klasa vuan nga fakti se klasa e çiftit varet nga Karakteristikat e hapësirës, që do të thotë se i njëjti çift në hapësira të ndryshme ka një klasë të ndryshme. Kjo është e papërshtatshme për qëllime praktike, që do të thotë se një klasifikim i tillë i çifteve kinematike është irracional, kështu që është më mirë të mos përdoret.
Këto hapësira janë zakonisht më pak se nominale. Raporti i vëllimit të hapësirës së punës dhe kalimit ose përplasjes përcakton korrektësinë e vendimit të marrë të njësisë kinematike të makinës së manipulimit, zgjidhja është më e mirë, pjesa më e madhe e hapësirës së përplasjes është e zënë nga hapësira e punës. Si parametra, koeficientët jepen me shprehje.
Disa nga diagramet e hershme të manipulatorëve iu dha një sërë lëvizjesh për elementë individualë dhe modelet kryesore të detajeve të tyre tregohen më poshtë. Transporti është një degë e ekonomisë që mbulon transportin e mallrave dhe udhëtarëve në mënyra të ndryshme. Infrastruktura Objektet e transportit.
Është e mundur të zgjidhet një formë e tillë e elementeve të një çifti, në mënyrë që me një lëvizje elementare të pavarur, të lindë një e dytë - një e varur (derivativ). Një shembull i një çifti të tillë kinematik është një vidë (Tabela 2. 1) . Në këtë çift, lëvizja rrotulluese e vidës (arrës) shkakton lëvizjen e saj përkthimore përgjatë boshtit. Një palë e tillë duhet t'i atribuohet një lëvizjeje të vetme, pasi në të realizohet vetëm një Lëvizje e pavarur më e thjeshtë.
Në fshat. Përdorimi i përgjithshëm. Përdorimi në rënie. Teknika - mjete materiale të veprimtarisë njerëzore. I ul njerëzit në punë, i bën ata më të vegjël. Më bujarja është teknika e prodhimit. Transporti. Edukimi dhe kultura sportive.
Një mekanizëm është një sistem trupor në të cilin lëvizja e një ose më shumë trupave shndërrohet në lëvizjen e duhur të trupave të tjerë. Makinë - një pajisje lëvizëse mekanike për shndërrimin e energjisë, materialit ose informacionit. Qëllimi është të lehtësojë punën fizike ose mendore të një personi.
Lidhjet kinematike.
Çiftet kinematike të dhëna në tabelë. 2.1, e thjeshtë dhe kompakte. Ata zbatojnë pothuajse të gjitha lëvizjet më të thjeshta relative të lidhjeve të nevojshme për krijimin e mekanizmave. Sidoqoftë, kur krijohen makina dhe mekanizma, ato përdoren rrallë. Kjo për faktin se forcat e mëdha të fërkimit zakonisht lindin në pikat e kontaktit të lidhjeve që formojnë një palë. Kjo çon në konsumim të konsiderueshëm të elementeve të çiftit, dhe kështu në shkatërrimin e tij. Prandaj, zinxhiri kinematik më i thjeshtë me dy lidhje i një çifti kinematik shpesh zëvendësohet me zinxhirë kinematikë më të gjatë, të cilët së bashku zbatojnë të njëjtën lëvizje relative të lidhjeve si çifti kinematik që zëvendësohet.
Sipas natyrës së konsumit, makinat ndahen në. Një makinë energjetike është një makinë që përdoret për të ndryshuar energjinë e çdo lloji në energji mekanike dhe anasjelltas. Nëse ndonjë energji shndërrohet në mekanike, atëherë makina të tilla janë motorë. Nëse nga mekanike në ndonjë - gjeneratorë.
Një makinë pune është një makinë që përdor energji mekanike nga një motor ose një burim tjetër energjie për të kthyer materialet. Makinat e punës ndahen në: Transport teknologjik. Makinat e informacionit - informacione rreth procesit. Makinat kibernetike - modifikim ose simulim i hyrjeve të mekanizmave, proceseve fiziologjike dhe biologjike, karakteristike për njeriun dhe natyrën. Karakterizohet nga elementë të inteligjencës artificiale.
Një zinxhir kinematik i krijuar për të zëvendësuar një çift kinematik quhet lidhje kinematike.
Le të japim shembuj të vargjeve kinematike, për çiftet kinematike rrotulluese, përkthimore, spirale, sferike dhe rrafsh në plan në praktikë.
Nga Tabela. 2.1 mund të shihet se analogu më i thjeshtë i një çifti kinematik rrotullues është një kushinetë me elementë rrotullues. Po kështu, udhëzuesit e rrotullës zëvendësojnë çiftin linear, etj.
Instrumente - pajisje për përdorim për matje sasive fizike, proceset e kontrollit, automatizimi i kontrollit dhe rregullimit. Mekanizmat janë një kombinim i pjesëve lëvizëse që ndryshojnë një lëvizje për lëvizjen e kërkuar të të tjerëve. të ngurta. Kur lëngu zëvendësohet nga një ndryshim në lëvizje, këto janë mekanizma hidraulikë në të cilët gazi është pneumatik.
Motori kryesor i motorit djegia e brendshmeështë një mekanizëm volant rrëshqitës që kthen një shufër pistoni rrëshqitëse në një bosht me gunga rrotulluese. Mekanizmi më i rëndësishëm i kompresorit konverton lëvizjen rrotulluese të boshtit të gungës në një lëvizje rrëshqitëse të pistonit.
Lidhjet kinematike janë më të përshtatshme dhe më të besueshme në funksionim, përballojnë forca (momente) shumë më të mëdha dhe lejojnë mekanizmat të funksionojnë me shpejtësi të larta relative të lidhjeve.
Llojet kryesore të mekanizmave.
Mekanizmi mund të shihet si rast i veçantë një zinxhir kinematik në të cilin të paktën një lidhje kthehet në një raft dhe lëvizja e lidhjeve të mbetura përcaktohet nga lëvizja e specifikuar e lidhjeve hyrëse.
Karakteristikat dalluese të zinxhirit kinematik, që përfaqëson mekanizmin, janë lëvizshmëria dhe siguria e lëvizjes së lidhjeve të tij në lidhje me raftin.
Një mekanizëm mund të ketë disa lidhje hyrëse dhe një daljeje, me ç'rast quhet mekanizëm përmbledhës dhe, anasjelltas, një lidhje hyrëse dhe disa dalje, atëherë quhet mekanizëm diferencues.
Mekanizmat ndahen nëudhëzues dhe transmetim.
mekanizmi i transmetimitquhet një pajisje e krijuar për të riprodhuar një marrëdhënie të caktuar funksionale midis lëvizjeve të lidhjeve hyrëse dhe dalëse.
mekanizmi udhëzuesata e quajnë një mekanizëm në të cilin trajektorja e një pike të caktuar të një lidhjeje që formon çifte kinematike vetëm me lidhje lëvizëse përkon me një kurbë të caktuar.
Konsideroni llojet kryesore të mekanizmave që kanë gjetur aplikim të gjerë në teknologji.
Quhen mekanizmat, lidhjet e të cilave formojnë vetëm çiftet e poshtme kinematikeartikuluar-levë. Këto mekanizma përdoren gjerësisht për faktin se ato janë të qëndrueshme, të besueshme dhe të lehta për t'u përdorur. Përfaqësuesi kryesor i mekanizmave të tillë është katër-lidhja e artikuluar (Fig. 2.1).
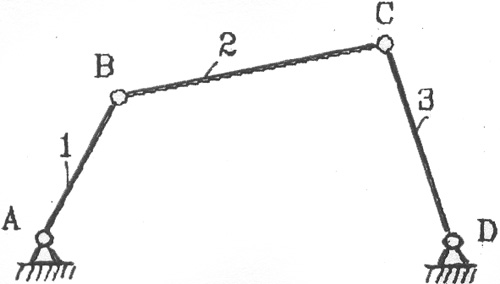
Emrat e mekanizmave zakonisht përcaktohen nga emrat e lidhjeve të tyre hyrëse dhe dalëse ose nga lidhja karakteristike e përfshirë në përbërjen e tyre.
Në varësi të ligjeve të lëvizjes së lidhjeve hyrëse dhe dalëse, ky mekanizëm mund të quhet fiksues-rrokues, dyfishtë fiksues, dyfishtë lëkundës, rrotullues-manivar.
Katër hallka e artikuluar përdoret në ndërtimin e veglave të makinerisë, prodhimin e instrumenteve, si dhe në makineritë bujqësore, ushqimore, borëpastruese dhe të tjera.

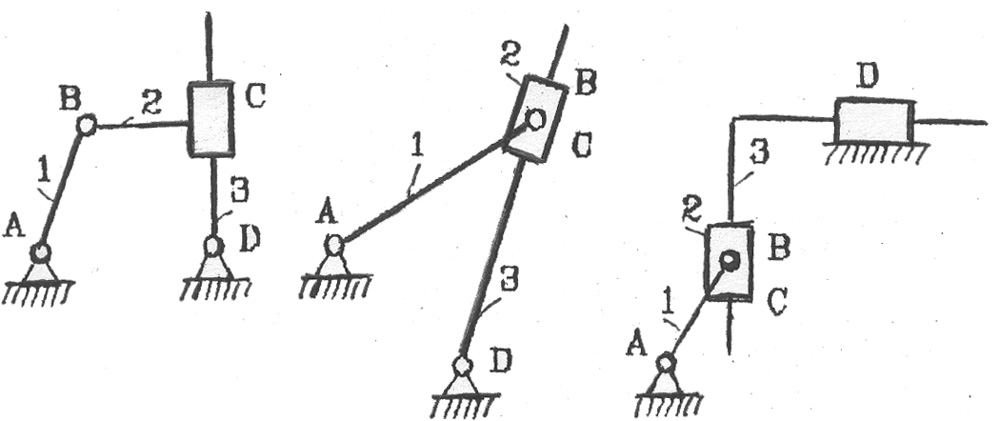
Nëse zëvendësojmë një çift rrotullues në një lidhje me katër varëse, për shembull D , në përkthimore, atëherë marrim mekanizmin e mirënjohur të rrëshqitësit me manival (Fig. 2.2).
Oriz. 2.2. Lloje të ndryshme të mekanizmave të rrëshqitësit të fiksimit:
1 - maniak 2 - shufra lidhëse; 3 - rrëshqitës
Mekanizmi rrëshqitës me fiksim (rrëshqitës-manivan) ka gjetur aplikim të gjerë në kompresorë, pompa, motorë me djegie të brendshme dhe makina të tjera.
Zëvendësimi i një çifti rrotullues në një lidhje me katër varëse NGA për përkthimin, marrim një mekanizëm lëkundës (Fig. 2.3).
Në p dhe c .2.3, në mekanizmin rrotullues përftohet nga një lidhje me katër varëse duke zëvendësuar çiftet rrotulluese në të Mund te bej për progresive.
Mekanizmat rrotullues kanë gjetur aplikim të gjerë në planerët për shkak të vetive të tyre të qenësishme të asimetrisë së punës dhe lëvizje boshe. Zakonisht ata kanë një goditje të gjatë pune dhe një goditje të shpejtë boshe që siguron kthimin e prestarit në pozicionin e tij origjinal.
Oriz. 2.3. Lloje të ndryshme të mekanizmave lëkundës:
1 - maniak; 2 - gur; 3 - prapaskenë.
Mekanizmat e menteshave kanë gjetur përdorim të madh në robotikë (Fig. 2.4).
E veçanta e këtyre mekanizmave është se ata kanë një numër i madh shkallë lirie, që do të thotë se ata kanë shumë disqe. Funksionimi i koordinuar i disqeve të lidhjeve hyrëse siguron lëvizjen e kapëses përgjatë një trajektoreje racionale dhe në një vend të caktuar në hapësirën përreth.
Aplikim i gjerë në inxhinierimekanizmat e kamerës. Me ndihmën e mekanizmave të kamerës, është strukturisht mënyra më e lehtë për të marrë pothuajse çdo lëvizje të lidhjes së shtyrë sipas një ligji të caktuar,
Aktualisht ka numër i madh varietetet e mekanizmave të kamerës, disa prej të cilave janë paraqitur në Fig. 2.5.

Ligji i domosdoshëm i lëvizjes së lidhjes dalëse të mekanizmit të kamerës arrihet duke i dhënë lidhjes hyrëse (kamera) një formë të përshtatshme. Kamera mund të kryejë rrotullim (Fig. 2.5, a, b ), përkthimore (Fig. 2.5, c, g ) ose lëvizje komplekse. Lidhja e daljes, nëse bën një lëvizje përkthimore (Fig. 2.5, a, në ), i quajtur shtytës, dhe nëse lëkundet (Fig. 2.5, G ) - lëkundëse. Për të reduktuar humbjet e fërkimit në çiftin kinematik më të lartë AT përdorni një rul shtesë lidhës (Fig. 2.5, G).
Mekanizmat e kamerës përdoren si në makinat e punës ashtu edhe në lloje të ndryshme të pajisjeve komanduese.
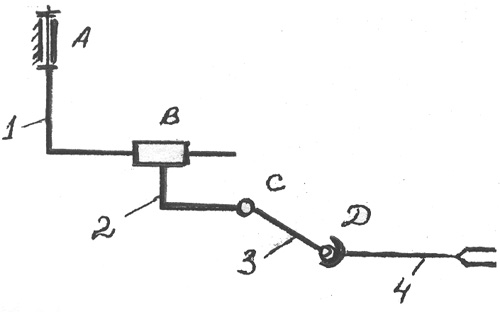
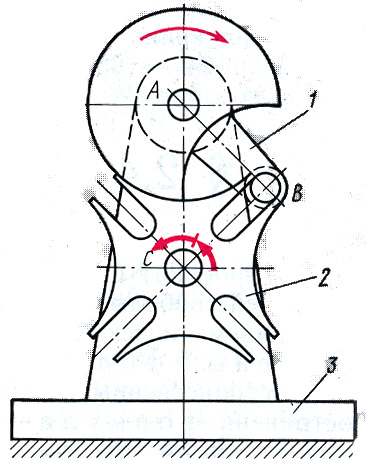
Shumë shpesh, në makinat metalprerëse, presa, instrumente të ndryshme dhe mjete matëse përdoren mekanizma me vida, më i thjeshti prej të cilëve është paraqitur në fig. 2.6:
Oriz. 2.6 Mekanizmi i vidhave:
1 - vidë; 2 - arrë; A, B, C - çifte kinematike
Mekanizmat e vidhave zakonisht përdoren aty ku është e nevojshme të konvertohet lëvizja rrotulluese në lëvizje përkthimore të ndërvarura ose anasjelltas. Ndërvarësia e lëvizjeve përcaktohet nga zgjedhja e saktë e parametrave gjeometrikë të çiftit të vidhave AT .
Pykë mekanizmat (Fig. 2.7) përdoren në lloj te ndryshme pajisje shtrënguese dhe pajisje në të cilat kërkohet të krijohet një forcë e madhe dalëse me forca të kufizuara hyrëse. Një tipar dallues i këtyre mekanizmave është thjeshtësia dhe besueshmëria e dizajnit.
Mekanizmat në të cilët transferimi i lëvizjes ndërmjet trupave kontaktues kryhet për shkak të forcave të fërkimit quhen fërkime. Mekanizmat më të thjeshtë të fërkimit me tre lidhje janë paraqitur në fig. 2.8

Oriz. 2.7 Mekanizmi i pykës:
1, 2 - lidhje; L, V, C - festa kinematike.

Oriz. 2.8 Mekanizmat e fërkimit:
a - mekanizmi i fërkimit me boshte paralele; b - mekanizmi i fërkimit me akset kryqëzuese; në - mekanizmi i fërkimit të raftit dhe pinionit; 1 - rul hyrës (rrota);
2 – rul i daljes (rrota); 2" - hekurudhor
Për faktin se lidhjet 1 dhe 2 ngjitur me njëri-tjetrin, përgjatë vijës së kontaktit midis tyre, lind një forcë fërkimi, e cila tërheq lidhjen e shtyrë së bashku me të 2 .
Ingranazhet e fërkimit përdoren gjerësisht në pajisje, disqe shiritash, variatorë (mekanizma me kontroll të qetë të shpejtësisë).
Për transmetim lëvizje rrotulluese sipas një ligji të caktuar, përdoren lloje të ndryshme ingranazhesh midis boshteve me akse paralele, kryqëzuese dhe kryqëzuese. mekanizmat . Me ndihmën e ingranazheve, është e mundur të transferohet lëvizja midis boshteve meboshtet fikse, pra me duke lëvizur në hapësirë.
Mekanizmat e ingranazheve përdoren për të ndryshuar frekuencën dhe drejtimin e rrotullimit të lidhjes së daljes, përmbledhjen ose ndarjen e lëvizjeve.

Në fig. 2.9 tregon përfaqësuesit kryesorë të ingranazheve me boshte fikse.
Fig 2.9. Drejtues ingranazhesh me boshte fikse:
a - cilindrike; b - konike; në - fund; g - raft;
1 - veshje; 2 - veshje; 2 * hekurudhë
Më i vogli nga dy ingranazhet rrjetë quhet pajisje, dhe më shumë - ingranazh.
Rafti është një rast i veçantë i një rrote ingranazhi në të cilin rrezja e lakimit është e barabartë me pafundësinë.

Nëse treni i ingranazheve ka ingranazhe me boshte të lëvizshme, atëherë ato quhen planetare (Fig. 2.10):
Ingranazhet planetare, megjithatë, në krahasim me ingranazhet me bosht fiks, lejojnë transferimin e fuqisë dhe raporteve më të mëdha të ingranazheve me një numër më të vogël ingranazhesh. Ato përdoren gjithashtu gjerësisht në krijimin e mekanizmave përmbledhës dhe diferencialë.
Transmetimi i lëvizjeve ndërmjet akseve të kryqëzuara kryhet duke përdorur një ingranazh krimbi (Fig. 2.11).

Një ingranazh krimbi merret nga një transmision me vidhos duke e prerë arrën gjatësore dhe duke e palosur atë dy herë në plane reciproke pingule. Ingranazhet e krimbave kanë vetinë e vetë-frenimit dhe ju lejojnë të zbatoni raporte të mëdha ingranazhesh në një fazë.
Oriz. 2.11. Ingranazhi i krimbave:
1 - rra, 2 - rrota e krimbave.
Mekanizmat e ingranazheve të lëvizjes së ndërprerë përfshijnë gjithashtu mekanizmin kryq maltez. Në fig. З-Л "2. tregon mekanizmin e "kryqit maltez" me katër tehe.
Mekanizmi i "kryqit maltez" konverton rrotullimin e vazhdueshëm të fiksimit të palëvizshëm - fiksimi 1 me një fanar 3 në rrotullimin e ndërprerë të "kryqit" 2, fanar 3 hyn në hullinë radiale të "kryqit" pa goditje 2 dhe e kthen në cep ku z është numri i brazdave.
Për të kryer lëvizjen vetëm në një drejtim, përdoren mekanizmat e kapakëve. Figura 2.13 tregon një mekanizëm me arpion, i përbërë nga një krah lëkundës 1, një rrotë me arpion 3 dhe putrat 3 dhe 4.

Kur lëkundet rrotulluesin 1 qen lëkundës 3 i jep rrotullim rrotës së arpionit 2 vetëm kur lëvizni krahun rrotullues në drejtim të kundërt të akrepave të orës. Për të mbajtur timonin 2 nga rrotullimi spontan në drejtim të akrepave të orës kur lëkundësi lëviz kundër orës, përdoret një puthje mbyllëse 4 .
Mekanizmat maltezë dhe me arpion përdoren gjerësisht në veglat e makinerive dhe instrumentet,
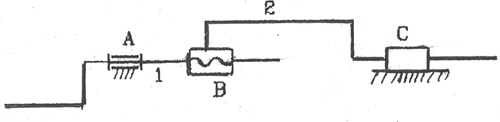
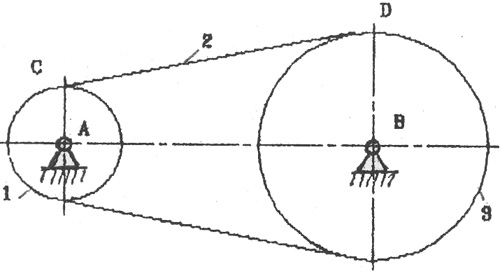
Nëse është e nevojshme të transferohet në relativisht distancë e madhe energjia mekanike nga një pikë e hapësirës në tjetrën, pastaj përdoren mekanizma me lidhje fleksibël.
Rripat, litarët, zinxhirët, fijet, shiritat, topat, etj., përdoren si lidhje fleksibël që transmetojnë lëvizjen nga njëri mekanizëm në tjetrin.
Në fig. 2.14 tregon një diagram bllok të mekanizmit më të thjeshtë me një lidhje fleksibël.
Ingranazhet me lidhje fleksibël përdoren gjerësisht në inxhinierinë mekanike, prodhimin e instrumenteve dhe industri të tjera.
Mekanizmat më tipikë të thjeshtë janë konsideruar më lart. mekanizmat jepen edhe në Literaturë të veçantë, pa-certifikata dhe libra referimi, për shembull, si p.sh.
Formulat strukturore të mekanizmave.
Ekzistojnë modele të përgjithshme në strukturën (strukturën) e mekanizmave të ndryshëm që lidhin numrin e shkallëve të lirisë W mekanizmi me numrin e lidhjeve dhe numrin dhe llojin e çifteve kinematike të tij. Këto modele quhen formula strukturore të mekanizmave.
Për mekanizmat hapësinorë, formula e Malyshev është aktualisht më e zakonshme, derivimi i së cilës është si më poshtë.
Lëreni në një mekanizëm me m lidhjet (përfshirë raftin), - numri i çifteve një, dy, tre, katër dhe pesë lëvizës. Le të shënojmë numrin e lidhjeve në lëvizje. Nëse të gjitha lidhjet lëvizëse do të ishin trupat e lirë, numri total shkallë lirie do të ishte 6 n . Megjithatë, çdo palë e vetme lëvizëse V klasa i imponon lëvizjes relative të lidhjeve që formojnë një çift, 5 lidhje, secila çift me dy lëvizje IV klasa - 4 obligacione, etj. Prandaj, numri i përgjithshëm i shkallëve të lirisë, i barabartë me gjashtë, do të reduktohet me shumën
ku është lëvizshmëria e një çifti kinematik, është numri i çifteve lëvizshmëria e të cilëve është e barabartë me i . Numri i përgjithshëm i lidhjeve të mbivendosura mund të përfshijë një numër të caktuar q lidhje të tepërta (të përsëritura) që dublikojnë lidhje të tjera pa e zvogëluar lëvizshmërinë e mekanizmit, por vetëm duke e kthyer atë në një sistem statikisht të papërcaktuar. Prandaj, numri i shkallëve të lirisë së mekanizmit hapësinor, i cili është i barabartë me numrin e shkallëve të lirisë së zinxhirit të tij kinematik lëvizës në lidhje me raftin, përcaktohet nga formula e mëposhtme Malyshev:
ose në stenografi
(2.2)
në , mekanizmi është një sistem statikisht i përcaktuar; në , një sistem statikisht i papërcaktuar.
Në rastin e përgjithshëm, zgjidhja e ekuacionit (2.2) është një problem i vështirë, që nga e panjohura W dhe q ; zgjidhjet e disponueshme janë komplekse dhe nuk merren parasysh në këtë leksion. Megjithatë, në një rast të veçantë, nëse W , e barabartë me numrin e koordinatave të përgjithësuara të mekanizmit, të gjetura nga konsideratat gjeometrike, nga kjo formulë mund të gjeni numrin e lidhjeve të tepërta (shih Reshetov L. N. Projektimi i mekanizmave racional. M., 1972)
(2.3)
dhe zgjidh problemin e përcaktueshmërisë statike të mekanizmit; ose, duke ditur që mekanizmi është i përcaktuar në mënyrë statike, gjeni (ose kontrolloni) W.
Është e rëndësishme të theksohet se formulat strukturore nuk përfshijnë madhësitë e lidhjeve, prandaj, në analizën strukturore të mekanizmave, ato mund të supozohen të jenë çdo (brenda kufijve të caktuar). Nëse nuk ka lidhje të tepërta (), montimi i mekanizmit ndodh pa deformim të lidhjeve, këto të fundit duket se vetë-rregullohen; prandaj mekanizmat e tillë quhen vetë-linjëzues. Nëse ka lidhje të tepërta (), atëherë montimi i mekanizmit dhe lëvizja e lidhjeve të tij bëhen të mundshme vetëm kur këto të fundit deformohen.
Për mekanizma të sheshtë pa lidhje të tepërta formula strukturore mban emrin e P. L. Chebyshev, i cili e propozoi për herë të parë në 1869 për mekanizma levë me çifte rrotulluese dhe një shkallë lirie. Aktualisht, formula Chebyshev shtrihet në çdo mekanizëm të sheshtë dhe rrjedh duke marrë parasysh kufizimet e tepërta si më poshtë
Lëreni një mekanizëm të sheshtë me m lidhje (përfshirë raftin), - numrin e lidhjeve të lëvizshme, - numri i çifteve më të ulëta dhe - numri i çifteve më të larta. Nëse të gjitha lidhjet lëvizëse do të ishin trupa të lirë që bëjnë një lëvizje plani, numri i përgjithshëm i shkallëve të lirisë do të ishte i barabartë me 3 n . Sidoqoftë, çdo çift i poshtëm imponon dy lidhje në lëvizjen relative të lidhjeve që formojnë çiftin, duke lënë një shkallë lirie dhe çdo çift më i lartë imponon një lidhje, duke lënë 2 shkallë lirie.
Numri i lidhjeve të mbivendosura mund të përfshijë një numër të caktuar lidhjesh të tepërta (të përsëritura), eliminimi i të cilave nuk rrit lëvizshmërinë e mekanizmit. Rrjedhimisht, numri i shkallëve të lirisë së një mekanizmi të sheshtë, d.m.th., numri i shkallëve të lirisë së zinxhirit të tij kinematik të lëvizshëm në lidhje me raftin, përcaktohet nga formula e mëposhtme Chebyshev:
(2.4)
Nëse dihet, nga këtu mund të gjeni numrin e lidhjeve të tepërta
(2.5)
Indeksi "p" i referohet faktit se po flasim për një mekanizëm idealisht të sheshtë, ose më saktë, për skemën e tij të sheshtë, pasi për shkak të pasaktësive në prodhim, një mekanizëm i sheshtë është deri diku hapësinor.
Sipas formulave (2.2)-(2.5), kryhet një analizë strukturore e mekanizmave ekzistues dhe një sintezë e diagrameve strukturore të mekanizmave të rinj.
Analiza strukturore dhe sinteza e mekanizmave.
Ndikimi i lidhjeve të tepërta në performancën dhe besueshmërinë e makinerive.
Siç u përmend më lart, me madhësi arbitrare (brenda kufijve të caktuar) të lidhjeve, një mekanizëm me lidhje të tepërta () nuk mund të montohet pa deformim të lidhjes. Prandaj, mekanizma të tillë kërkojnë saktësi të shtuar të prodhimit, përndryshe, gjatë procesit të montimit, lidhjet e mekanizmit deformohen, gjë që shkakton ngarkimin e çifteve kinematike dhe lidhjeve me forca shtesë të konsiderueshme (përveç atyre themelore forcat e jashtme, për transmetimin e të cilit është menduar mekanizmi). Me saktësi të pamjaftueshme në prodhimin e një mekanizmi me lidhje të tepërta, fërkimi në çifte kinematike mund të rritet shumë dhe të çojë në bllokimin e lidhjeve, prandaj, nga ky këndvështrim, lidhjet e tepërta në mekanizma janë të padëshirueshme.
Sa i përket lidhjeve të tepërta në zinxhirët kinematikë të mekanizmit, gjatë projektimit të makinave, ato duhet të eliminohen ose të lihen në një sasi minimale nëse eliminimi i plotë i tyre rezulton i padobishëm për shkak të kompleksitetit të dizajnit ose për disa arsye të tjera. Në rastin e përgjithshëm, duhet kërkuar zgjidhja optimale, duke marrë parasysh disponueshmërinë e pajisjeve të nevojshme teknologjike, koston e prodhimit, jetëgjatësinë e kërkuar të shërbimit dhe besueshmërinë e makinës. Prandaj, kjo është një detyrë shumë e vështirë për çdo rast specifik.
Ne do të shqyrtojmë metodologjinë për përcaktimin dhe eliminimin e lidhjeve të tepërta në zinxhirët kinematikë të mekanizmave duke përdorur shembuj.
Lëreni një mekanizëm të sheshtë me katër lidhje me katër çifte rrotulluese me një lëvizje të vetme (Fig. 2.15, a ) për shkak të pasaktësive të prodhimit (për shembull, për shkak të jo paralelizmit të akseve A dhe D ) doli të ishte hapësinore. Montimi i zinxhirëve kinematikë 4, 3, 2 dhe veçmas 4, 1 nuk shkakton vështirësi, por pikë B, B' mund të vendoset në bosht X . Megjithatë, për të mbledhur një çift rrotullues AT , i formuar nga lidhje 1 dhe 2 , do të jetë e mundur vetëm duke kombinuar sistemet e koordinatave Bxyz dhe B 'x' y' z' , e cila kërkon një zhvendosje (deformim) linear të pikës Lidhja B' 2 përgjatë boshtit x dhe deformimet këndore të lidhjes 2 rreth boshteve x dhe z (treguar me shigjeta). Kjo do të thotë se ka tre lidhje të tepërta në mekanizëm, gjë që konfirmohet edhe me formula (2.3): . Në mënyrë që ky mekanizëm hapësinor të jetë i përcaktueshëm statikisht, nevojitet skema tjetër strukturore e tij, për shembull, e paraqitur në Fig. 2.15, b , ku Montimi i një mekanizmi të tillë do të bëhet pa ngushtësi, që nga shtrirja e pikave B dhe B' do të jetë e mundur duke lëvizur pikën NGA në një palë cilindrike.
Një variant i mekanizmit është i mundur (Fig. 2.15, në ) me dy çifte sferike (); Në këtë rast, përveçlëvizshmëria bazëshfaqet mekanizmilëvizshmëria lokale- aftësia për të rrotulluar shufrën lidhëse 2 rreth boshtit të saj dielli ; kjo lëvizshmëri nuk ndikon në ligjin bazë të lëvizjes së mekanizmit dhe madje mund të jetë i dobishëm për sa i përket nivelimit të konsumit të menteshave: shufra lidhëse 2 gjatë funksionimit të mekanizmit, ai mund të rrotullohet rreth boshtit të tij për shkak të ngarkesave dinamike. Formula Malyshev konfirmon se një mekanizëm i tillë do të jetë i përcaktuar statikisht:

Oriz. 2.15
Më e thjeshta dhe metodë efektive eliminimi i lidhjeve të tepërta në mekanizmat e pajisjeve - përdorimi i një çifti më të lartë me një kontakt pikë në vend të një lidhjeje me dy çifte më të ulëta; shkalla e lëvizshmërisë së mekanizmit të sheshtë në këtë rast nuk ndryshon, pasi, sipas formulës Chebyshev (at):
Në fig. 2.16, a, b, c jepet një shembull i eliminimit të lidhjeve të tepërta në një mekanizëm me kamerë me një shtytës rrotullues në lëvizje progresive. Mekanizmi (Fig. 2.16, a ) - me katër lidhje (); me përjashtim të lëvizshmërisë kryesore (rrotullimi i kamerës 1
) ka lëvizshmëri lokale (rrotullim i pavarur i një rul cilindrik të rrumbullakët 3
rreth boshtit të tij) Rrjedhimisht,. Skema e sheshtë nuk ka lidhje të tepërta (mekanizmi është montuar pa ndërhyrje). Nëse, për shkak të pasaktësive në prodhim, mekanizmi konsiderohet hapësinor, atëherë me kontakt linear të rulit 3 me kamera 1 sipas formulës së Malyshev në , marrim, por nën një kusht të caktuar. Çift kinematik cilindër - cilindër (Fig. 2.16, 6
) kur rrotullimi relativ i lidhjeve është i pamundur 1, 3 rreth boshtit z do të ishte një çift trepalësh. Nëse një rrotullim i tillë, për shkak të pasaktësive në prodhim, ndodh, por është i vogël, dhe kontakti linear praktikisht ruhet (nën ngarkim, copëza e kontaktit është afër një drejtkëndëshi në formë), atëherë kjo 
çifti kinematik do të jetë katër-lëvizshëm, pra, dhe
Fig.2.17
Reduktimi i klasës së çiftit më të lartë duke përdorur një rul në formë fuçi (çifti me pesë lëvizje me kontakt pikë, Fig. 2.16, në ), marrim për dhe - mekanizmi është statikisht i përcaktuar. Sidoqoftë, duhet të mbahet mend se kontakti linear i lidhjeve, megjithëse kërkon saktësi të shtuar të prodhimit, ju lejon të transferoni ngarkesa më të mëdha sesa kontakti i pikës.
Në Fig. 2.16, d, e jepet një shembull tjetër i eliminimit të lidhjeve të tepërta në një ingranazh me katër lidhje (, kontakti i dhëmbëve të rrotave 1, 2 dhe 2, 3 - lineare). Në këtë rast, sipas formulës Chebyshev, - skema e sheshtë nuk ka lidhje të tepërta; sipas formulës Malyshev, mekanizmi është statikisht i papërcaktuar, prandaj, do të kërkohet saktësi e lartë e prodhimit, në veçanti, për të siguruar paralelizmin e akseve gjeometrike të të tre rrotave.
Zëvendësimi i dhëmbëve përtaci 2 në formë fuçie (Fig. 2.16, d ), marrim një mekanizëm të përcaktuar statikisht.
Çift kinematik konjugim i lëvizshëm i dy lidhjeve të forta, duke vendosur kufizime në lëvizjen e tyre relative nga kushtet e komunikimit. Secila prej kushteve të lidhjes eliminon një shkallë lirie ,
pra mundësia e një prej 6 lëvizjeve të pavarura relative në hapësirë. Në një sistem koordinativ drejtkëndor, 3 janë të mundshme lëvizjet përkthimore(në drejtim të 3 boshteve koordinative) dhe 3 rrotulluese (rreth këtyre akseve). Sipas numrit të kushteve të komunikimit S K. p. ndahen në 5 klasa. Numri i shkallëve të lirisë K. p. W=6-S. Brenda çdo klase, artikujt K. ndahen në lloje sipas lëvizjeve të mbetura të mundshme relative të lidhjeve. Sipas natyrës së kontaktit të lidhjeve, K. p. e poshtme dallohen - me kontakt përgjatë sipërfaqeve, dhe ato më të larta - me kontakt përgjatë vijave ose në pika. Artikujt K. më të lartë janë të mundshëm për të 5 klasat dhe shumë lloje; më e ulët - vetëm 3 klasa dhe 6 lloje ( fig.1
). Bëhet edhe dallimi midis C.P të mbyllur gjeometrikisht dhe jo të mbyllur. oriz. një
), dhe së dyti, kërkohet një forcë shtypëse për mbyllje, e ashtuquajtura. mbyllja me forcë (për shembull, në një mekanizëm me kamerë). Në mënyrë konvencionale, bashkimet e lëvizshme me disa elementë rrotullues të ndërmjetëm (për shembull, kushineta me top dhe rul) dhe me elementë të ndërmjetëm të deformueshëm (për shembull, të ashtuquajturat mentesha pa reagime të pajisjeve me susta të sheshta) referohen si k. oriz. 2
). N. Ya. Niberg.
I madh enciklopedia sovjetike. - M.: Enciklopedia Sovjetike. 1969-1978 .
Shihni se çfarë është "çifti kinematik" në fjalorë të tjerë:
Lidhja e 2 hallkave të mekanizmit, duke lejuar lëvizjen relative të tyre. Çifti kinematik, në të cilin lidhjet preken në sipërfaqe, quhet ai i poshtëm (për shembull, një menteshë rrotulluese, një rrëshqitës përkthimor dhe një udhëzues). Çifti kinematik, ... ... Fjalori i madh enciklopedik
çift kinematik- çift Lidhja e dy lidhjeve fqinje, duke lejuar lëvizjen relative të tyre. [Mbledhja e termave të rekomanduara. Çështja 99. Teoria e mekanizmave dhe e makinave. Akademia e Shkencave e BRSS. Komiteti i Terminologjisë Shkencore dhe Teknike. 1984] Temat e teorisë ... ... Manuali i Përkthyesit Teknik- kinematinė pora statusas T sritis fizika atitikmenys: angl. çift kinematik vok. kinematisches Elementenpaar, n rus. çift kinematik, f pranc. palë kinematike, f … Fizikos terminų žodynas
Lidhja e dy lidhjeve fqinje, duke i lejuar ato të lidhen. trafiku. Sipërfaqet, linjat, pikat, në të cilat një lidhje mund të vijë në kontakt me një lidhje tjetër, të quajtura. elementet e lidhjes. K. p. ndahen në më të ulëta (sipërfaqe kontakti) dhe më të larta ... ... Fjalor i madh enciklopedik politeknik
çift kinematik- çifti kinematik Lidhja e dy trupave të ngurtë të mekanizmit, duke lejuar lëvizjen relative të tyre të dhënë. Kodi IFToMM: 1.2.3 Seksioni: KONCEPTET E PËRGJITHSHME TË TEORISË SË MEKANIZMAVE DHE MAKINIMEVE ... Teoria e mekanizmave dhe makinerive
çift- çift kinematik; çift Një lidhje e dy lidhjeve të njëpasnjëshme, duke lejuar lëvizjen relative prej tyre. dy forca; sistemi çift dy forcat paralele, e barabartë në vlerë absolute dhe e drejtuar në drejtime të kundërta ...
çifti i sipërm- Një çift kinematik në të cilin lëvizja e kërkuar relative e lidhjeve mund të merret vetëm duke prekur elementët e tij përgjatë vijave dhe në pikat ... Fjalor shpjegues terminologjik politeknik





