Përcaktimi i shkallës së lëvizshmërisë. Analiza strukturore dhe sinteza e mekanizmave. Llojet e grupeve Assur klasa II
2 Analiza strukturore dhe sinteza e mekanizmave
2.1 Përcaktimi i numrit të shkallëve të lirisë së vargut kinematik
Siç u përmend më lart, numri i lidhjeve hyrëse për shndërrimin e një zinxhiri kinematik në një mekanizëm duhet të jetë i barabartë me numrin e shkallëve të lirisë së këtij zinxhiri kinematik.
Numri i shkallëve të lirisë së zinxhirit kinematik në këtë rast nënkupton numrin e shkallëve të lirisë së lidhjeve të lëvizshme në lidhje me raftin (lidhja e marrë si fikse). Sidoqoftë, vetë rafti në hapësirën reale mund të lëvizë.
Lëvizshmëri ekuivalente e komunikimit i autorizuar i autorizuar i autorizuar i ndaluar i autorizuar i autorizuar i autorizuar i autorizuar. Një seri kombinimesh të lidhjes së bashkimit të topit dhe lidhjes rrëshqitëse. Shënime: Lidhja e serisë ka avantazhin e zëvendësimit të një pike kontakti të brishtë ose të llojit të linjës me një sipërfaqe kontakti teknologjikisht më interesante, pasi ato reduktojnë presionin dhe në këtë mënyrë përmirësojnë besueshmërinë e lidhjes. Nëse lëvizshmëria lejohet nga secila lidhje elementare, ndodh lëvizshmëria e brendshme e pjesës që përmban lidhja serike.
Për shembull, çdo trup i palëvizshëm në Tokë ka një shkallë lirie zero, por në hapësirën botërore, së bashku me Tokën, ai lëviz duke përdorur të gjashtë shkallët e lirisë. Një shembull tjetër: zinxhiri kinematik në themel motor pistoni, ka një shkallë lirie në lidhje me raftin (lidhja e marrë në studim për një fikse, e cila përbëhet nga një cilindër i ngjitur në karterin dhe kornizën ose trupin e një makine, motoçiklete ose makinerie tjetër), megjithëse vetë rafti lëviz edhe kur makina lëviz.
Mund të jetë rrotullim ose përkthim pa shkaktuar asnjë lëvizje të pjesëve të tjera. Përdorimi i shembullit të mëparshëm në lidhjet paralele për kërkimin dhe lidhjen. Kështu, ndryshe nga një lidhje serike, një lidhje që përfshin disa lidhje elementare të vendosura paralelisht me njëra-tjetrën redukton sasinë e lëvizshmërisë midis dy pjesëve. Kjo shtypje e shkallëve të lëvizshmërisë kryhet nëpërmjet transferimit të veprimeve mekanike ndërmjet dy atyre të fortëve, për shkak të ekzistencës së disa komponentëve të torsorit të transmetuar, duke qenë se: - kjo lëvizshmëri është e ndaluar në përkthimin përgjatë boshtit që korrespondon me një jo. -vlera zero e komponentit të komponentit të shumës kryesore. - Lëvizshmëria është e ndaluar rrotullimi rreth boshtit rezulton nga një vlerë jo zero e komponentit kohor të elementit kyç përgjatë këtij aksi.
Sidoqoftë, pavarësisht nëse makina po lëviz apo jo, natyra e lëvizjes së lidhjeve të motorit të pistonit në lidhje me raftin mbetet e pandryshuar.
Le të prezantojmë shënimin e mëposhtëm:
k është numri i hallkave të vargut kinematik
p 1 - numri i çifteve kinematike të klasës së parë në një zinxhir të caktuar
p 2 - numri i çifteve të klasës së dytë
p 3 - numri i çifteve të klasës së tretë
Një lidhje është izostatike nëse numri i të panjohurave të torsorit të transmetuar është i barabartë. Referenca është e papërcaktuar nëse numri i të panjohurave të çelësit të transmetuar tejkalon. Numri i ekuacioneve të parashikuara nga parimi themelor. Diplomë në Inxhinieri e Aplikuar 11.
Ai ofron më poshtë dy opsione duke përdorur lidhje elementare paralele me rrotulluesin. Lidhja është një lidhje lineare unazore e boshtit, lidhja është boshti i boshtit të rrotullimit. Përcakton kthesën statike të vijës. Përcaktoni shkallën e hiperstatizmit të lidhjes. Në një studim kinematik, përcaktoni një torsor ekuivalent me dy lidhje paralelisht dhe. dhe të panjohurat hiperstatike. lidhje kinematike ekuivalente me dy lidhje dhe. në mënyrë që lidhja, e cila është e barabartë me dy lidhje, dhe është një lidhje izostatike e rrotullimit, ofron disa modifikime të mundshme të lidhjes dhe lidhja mbetet e pandryshuar.
p 4 - numri i çifteve të klasës së katërt
p 5 është numri i çifteve të klasës së pestë.
Numri i përgjithshëm i shkallëve të lirisë k të lidhjeve të lira të vendosura në hapësirë është 6k. Në një zinxhir kinematik, ato lidhen në çifte kinematike (d.m.th., lidhjet mbivendosen në lëvizjen e tyre relative).
Për më tepër, një zinxhir kinematik me një raft (një lidhje e marrë si fikse) përdoret si mekanizëm. Prandaj, numri i shkallëve të lirisë së zinxhirit kinematik do të jetë i barabartë me numri total shkallët e lirisë së të gjitha lidhjeve minus kufizimet e vendosura në lëvizjen e tyre relative:
Lidhjet statike bust dhe kanë. Diagrami i lidhjes duket si ky: Çift rrotullues statik: Me parimin themelor të statikës, ai demonstron këtë. Deformimi kinematik: duke përdorur ligjin e përbërjes së torrave kinematike, marrim.
Lëvizja ekziston ndërmjet dhe të gjitha lidhjeve. Hiperstatizmi dhe lëvizshmëria: Marrëdhëniet me shkrim. E barabartë me numrin e të panjohurave kinematike që nuk varen nga lidhja ekuivalente. Një pjesë ka lëvizshmëri të brendshme në mekanizëm nëse mund të ketë një lëvizje që nuk shkakton lëvizje të pjesëve të tjera të mekanizmit. Prandaj, një marrëdhënie ekuivalente.
W=6k– ∑ S i
Numri i lidhjeve të vendosura nga të gjitha çiftet e klasës I është i barabartë me numrin e tyre, pasi çdo çift i klasës së parë imponon një lidhje në lëvizjen relative të lidhjeve të lidhura në një çift të tillë; numri i lidhjeve të vendosura nga të gjitha çiftet e klasës II është i barabartë me numrin e dyfishuar të tyre (secila palë e klasës së dytë imponon dy lidhje), etj.
Α = α2 β = β2 γ = γ1 γ 2 ekuivalente. Vini re se kjo lehtësi e fabrikimit kompensohet pjesërisht nga mekanizmi më kompleks. Kompleksiteti është zakonisht për shkak të futjes së komponentëve të ndërmjetëm në seri në lidhje për të rritur numrin e shkallëve të lirisë. Sigurimi që sipërfaqet që do të bashkohen janë në kontakt. Prandaj, një njohuri e saktë e teorisë së vidhos së çdo lidhjeje, e cila lejon një vlerësim.
Dizajni izostatik drejton vendosjen e pozicionit të saktë të pjesës në raport me të tjerët. presioni i duhur midis sipërfaqeve të kontaktit. Shembull: pozicionimi izostatik Kelvin Në këtë pozicion përdoret, për shembull, për të kthyer frëngjitë, bashkim izostatik dhe i plotë ndërmjet pjesëve dhe kryhet duke përdorur një kombinim paralel të tre lidhjeve të mëposhtme:: pika e lidhjes.: Lidhja lineare unazore, boshti i të cilit kalon nga qendra.
Të gjashtë shkallët e lirisë hiqen nga lidhja, merren si fikse (gjashtë lidhje janë mbivendosur në raft). Në këtë mënyrë:
S 1 \u003d p 1, S 2 \u003d 2p 2, S 3 \u003d 3p 3, S 4 \u003d 4p 4, S 5 \u003d 5p 5, S raft \u003d 6,
dhe shuma e të gjitha lidhjeve
∑ S i =p 1 +2p 2 +3p 3 +4p 4 +5p 5 +6.
Rezultati është formula e mëposhtme për përcaktimin e numrit të shkallëve të lirisë së një zinxhiri kinematik hapësinor:
Rrafshi i formuar nga boshti i lidhjes lineare rrethore dhe pika e kontaktit të pikës së lidhjes. Megjithatë, mekanizmi i papërcaktuar është shpesh më i ngurtë se mekanizmi izostatik, i cili është gjithashtu një faktor në saktësinë e pozicionit të një pjese në raport me një tjetër. Ata që ofrojnë si pozicionimin ashtu edhe ruajtjen e kontaktit të dhomës.
Mbështetësit e tij ndahen në dy kategori. E treguar nga lidhjet në studimin paralel, lidhja ekuivalente e përftuar në këtë mënyrë ndërmjet pjesës së punës dhe njësisë së përpunimit është izostatike dhe e plotë. Studimi i mbajtjes së kontaktit të siguruar nga vida.
W=6k–p 1 –2p 2 –3p 3 –4p 4 –5p 5 –6.
Duke grupuar termat e parë dhe të fundit të ekuacionit, marrim:
W=6(k–1)–p 1 –2p 2 –3p 3 –4p 4 –5p 5 ,
ose ne fund:
W=6n–p 1 –2p 2 –3p 3 –4p 4 –5p 5,
ku n është numri i hallkave lëvizëse të zinxhirit kinematik.
Ky ekuacion quhet formula strukturore zinxhir i përgjithshëm kinematik.
Formula është marrë për herë të parë (në një formë paksa të ndryshme) nga P.I. Somov në 1887, dhe zhvilluar nga A.P. Malyshev në vitin 1923. Prandaj, shpesh quhet formula Somov-Malyshev. Në disa tekste, ajo quhet formula Malyshev - pas autorësisë së versionit përfundimtar.
Le të veprojë në një veprim mekanik spirale, mund të përcaktohen referenca të panjohura statike të njohura. Lidhja e pjesës së punës me njësinë e përpunimit nëpërmjet vidës përfshin dy lidhjet serike të mëposhtme: boshtin e lidhjes së pikës, licencat e aplikuara në inxhinierinë mekanike 20. Përcaktoni teorinë e ekuivalentit të vidës së lidhjes së këtyre dy kanaleve serike. Prandaj, lidhja ekuivalente midis montimit dhe pjesës së punës me pajisjen e kontaktit mbajtës është një lidhje e lirshme.
Kjo pajisje mbajtëse kontakti nuk shton ndonjë të panjohur statike në lidhjet e pozicionimit të pjesëve të futura tashmë. Prandaj, marrëdhënia ekuivalente me lidhjet pjesë-montim është gjithmonë izostatike. Në përgjithësi, një marrëdhënie ekuivalente midis dy të ngurta një mbajtës kontakti që nuk siguron pozicionimin relativ të grimcave të ngurta duhet të jetë një lidhje e lirshme. Një marrëdhënie e tillë lejon të mos rritet shkalla e hiperstatizmit të marrë tashmë nga marrëdhëniet e pozicionimit relativ të dy të ngurta.
p 1 - numri i çifteve me lëvizje të vetme (d.m.th. çiftet kinematike që ofrojnë një shkallë lirie në lëvizje relative),
p 2 është numri i çifteve me dy lëvizje, etj.
Kjo do të thotë, indeksi në këtë rast nuk tregon numrin e lidhjeve, por numrin e shkallëve të lirisë, dhe në formulë përcaktimet p 1 dhe p 5, si dhe p 2 dhe p 4 ndërrohen. Prandaj, kur përdorni tekste të ndryshme shkollore, është e nevojshme të monitorohet me kujdes interpretimi i autorit, sepse, për fat të keq, shpesh autorë të ndryshëm I njëjti emërtim ka kuptime të ndryshme. Si rezultat, me të njëjtin shënim, të njëjtat formula kanë forma të ndryshme.
Qarku i vazhdueshëm është i mbyllur. Në rastin e një zinxhiri të vazhdueshëm të mbyllur të përbërë nga trupa të ngurtë të mbledhur në vazhdimësi nga lidhje, grafiku i lidhjes duket kështu: një zinxhir i mbyllur i vazhdueshëm quhet gjithashtu një zinxhir ose lak i thjeshtë. Tregohet gjithashtu se shkalla e lëvizshmërisë m të një zinxhiri të vazhdueshëm të mbyllur është: m = 6n - gs, ku m është numri i të panjohurave kinematike të pavarura të një zinxhiri të vazhdueshëm të mbyllur. Ky raport na lejon të llogarisim shkallën e hiperstatizmit, duke ditur shkallën e lëvizshmërisë. Kërkim kinematik.
Mund të thuhet gjithashtu se shkalla e lëvizshmërisë së një zinxhiri të mbyllur të vazhdueshëm është numri i të panjohurave kinematike të pavarura që duhet të fiksohen për të përcaktuar të gjitha të tjerat. Konsideroni mekanizmin për kontrollin e shufrës nga një ekscentrik. Sugjeroni një zgjidhje për ta bërë këtë mekanizëm izostatik. Për të shtuar këto tre buste, ato duhet të shprehen në të njëjtën pikë.
Manipuluesit dhe robotët industrialë përdorin zinxhirë kinematikë të hapur (të hapur). Në zinxhirë të tillë, numri i lidhjeve lëvizëse është i barabartë me numrin total të çifteve kinematike:
n=p 1 +2p 2 +3p 3 +4p 4 +5p 5,
W=6(p 1 +2p 2 +3p 3 +4p 4 +5p 5)–p 1 –2p 2 –3p 3 –4p 4 –5p 5 ,
ose ne fund:
W=5p 1 +4p 2 +3p 3 +2p 4 +p 5 .
Kështu, numri i shkallëve të lirisë së një zinxhiri të hapur kinematik është i barabartë me shumën e lëvizshmërive (gradave të lirisë) të çifteve kinematike të përfshira në këtë zinxhir. Përveç shkallëve të lirisë, cilësia e punës së manipuluesve dhe robotëve industrialë ndikohet shumë nga manovrimi i tyre.
Diplomë e aplikuar në inxhinieri mekanike 25. Shënim. Kjo lidhje bën të mundur llogaritjen e shkallës së hiperstatizmit, duke ditur shkallën e lëvizshmërisë së një zinxhiri kompleks. Nofulla e lëvizshme ka një lidhje rrëshqitëse. Licenca e aplikuar në inxhinieri mekanike 26. Konkluzioni Mekanizmat e panjohur hiperstatik përcaktohen nga një studim statik.
Le të themi: pavarësisht nga ky mekanizëm. shkalla e saj e hiperstatizmit. A korrespondojnë kushtet dimensionale dhe këndore të pozicionit relativ të lidhjeve? Këto gjashtë ekuacione janë të pavarura. Prandaj shkalla e lëvizshmërisë së zinxhirit. I licencuari i aplikuar në inxhinieri mekanike 27.
Manovrueshmëriaështë numri i shkallëve të lirisë së manipuluesit me një kapje fikse. Ai përcakton aftësinë e manipuluesit (robotit industrial) për të anashkaluar pengesat dhe llogaritet me formulën e mëposhtme:
ku M është manovrimi i manipuluesit.
Siç u përmend më lart, një numër i konsiderueshëm i mekanizmave të përdorur në praktikë janë mekanizma të sheshtë (d.m.th., ato bazohen në zinxhirë të sheshtë kinematikë). Vendosja e një zinxhiri kinematik në një plan imponon tre kufizime të përgjithshme në lëvizjen e të gjitha hallkave të këtij zinxhiri, kështu që k lidhjet e lira të vendosura në një plan kanë gjithsej 3k gradë lirie.
Kjo shkallë lëvizshmërie korrespondon me tre komponentë. Lëvizja nga. KOMUNIKACIONET NGA KOMISIONI PËR PARLAMENTIN EVROPIAN, KËSHILLIN, KOMISIONIN EKONOMIK E SHOQËROR EVROPIAN DHE KOMISIONIN E RAJONEVE. Strategjia Evropiane e Lëvizjes me Emetime të ulëta.
Lëvizshmëria me emetim të ulët është një element i rëndësishëm në tranzicionin e përgjithshëm drejt një ekonomie rrethore me karbon të ulët që Evropa ka nevojë për të mbetur konkurruese dhe për të përmbushur nevojat e lëvizshmërisë së njerëzve dhe mallrave. Transporti përbën pothuajse një të katërtën e emetimeve të gazeve serrë në Evropë; është edhe shkaktari kryesor i ndotjes së ajrit në qytete. Përgjigja e Evropës ndaj këtyre sfidave është një zhvendosje e pakthyeshme drejt lëvizshmërisë së ulët të karbonit dhe ndotësve të ajrit. Emetimet e ndotësve në ajër që janë të dëmshme për shëndetin tonë duhet të reduktohen menjëherë.
Nëse zinxhiri kinematik, i cili, në përputhje me formulën Chebyshev, ka një shkallë lirie zero, rezulton të jetë i lëvizshëm, kjo do të thotë se ka lidhje pasive (të tepërta) në këtë zinxhir. Kur studiohet mekanizmi në këtë rast, lidhjet që krijojnë lidhje pasive thjesht hiqen nga shqyrtimi.
Në figurën 4a është paraqitur diagrami kinematik i mekanizmit elipsografik (W=3 ⋅ 3 – 2 ⋅ 4 = 1). Ka vetitë e mëposhtme: pikat A dhe B lëvizin në mënyrë të përkthyera përgjatë boshteve X dhe Y që i përkasin rrëshqitësve 1 dhe 3.
Tranzicioni drejt lëvizshmërisë me emetim të ulët tashmë ka filluar globalisht dhe po përshpejtohet. Kjo jep mundësi të mëdha. Kjo i lejon prodhuesit evropianë të automobilave të modernizohen, të promovojnë në mënyrë aktive teknologjitë e reja dhe të rivendosin besimin e konsumatorëve. Është gjithashtu një mundësi për industritë dhe prodhuesit e tjerë që të ruajnë standardet globale dhe të eksportojnë produktet e tyre. Ai gjithashtu ofron një mundësi për kompanitë inovative të energjisë dhe ofruesit e shërbimeve, si dhe investitorët, për të promovuar rritjen e qëndrueshme dhe për të krijuar vende të reja pune.
Në këtë rast, pika M përshkruan një elipsë me një gjysmëbosht të vogël të barabartë me segmentin AM dhe të vendosur përgjatë boshtit Y, dhe me një gjysmëbosht BM të madh të vendosur përgjatë boshtit X (d.m.th., një elips të shtrirë përgjatë boshtit X); pika N përshkruan një elipsë me bosht gjysmë të vogël BN dhe bosht gjysmë të madh AN, të shtrirë përgjatë boshtit Y.
Pika C (mesi i segmentit AB) përshkruan një "elipsë" me gjysmëboshte të barabartë, d.m.th. rrethi. Nëse një lidhje 5 është e lidhur me varëse në një pikë fikse O (origjina e koordinatave) dhe në çdo pikë në lidhjen AB (për shembull, në pikën N - Figura 4b), atëherë marrim një sistem fiks (varg):
Ritmi i tij aktual duhet të përshpejtohet nëpërmjet strategjisë aktuale të lëvizshmërisë me emetim të ulët, duke ofruar njëkohësisht lëvizshmërinë e nevojshme për një treg vendas efikas dhe lidhje globale. Kjo do të kërkojë një gamë të gjerë aktivitetesh. Plani i Veprimit përcakton veprimet që Komisioni synon të ndërmarrë, në përputhje me parimet dhe proceset për përmirësimin e legjislacionit, për të siguruar që të gjitha masat e propozuara të jenë faktike, efektive, efikase, proporcionale dhe të respektojnë plotësisht parimin e subsidiaritetit.
W = 3 ⋅ 4 – 2 ⋅ 6 = 0.
Megjithatë, nëse lidhja 5 është e bashkangjitur me menteshën e dytë për të lidhur AB në pikën C (Figura 4c), atëherë lëvizja e pikës C që i përket lidhjes 5 dhe lëvizja e pikës C që i përket lidhjes AB bëhen të koordinuara - të dyja pikat lëvizin përgjatë e njëjta trajektore (përgjatë një rrethi me rreze OC).
Në këtë rast të vetëm të veçantë, zinxhiri kinematik bëhet i lëvizshëm (formula nuk mund ta "parashikojë" një gjë të tillë rast i veçantë- jep rezultatin për rastin e përgjithshëm të kombinimit përkatës të lidhjeve dhe çifteve kinematike). Në këtë rast, lidhja 5 imponon një lidhje pasive (të tepërt) dhe kjo lidhje mund të injorohet kur studiohet mekanizmi.
Sepse transport automobilistik përgjegjëse për më shumë se 70% të emetimeve të gazeve serrë nga transporti dhe pjesën më të madhe të ndotjes së ajrit, kjo është një fushë ku do të përqendrohen përpjekjet, por të gjithë sektorët e transportit mund dhe duhet të kontribuojnë. Nëpërmjet nismave të saj, BE-ja do të krijojë një mjedis të favorshëm dhe do të ofrojë stimuj të fortë për lëvizshmërinë me emetim të ulët. Masat e shpallura në këtë komunikim janë pjesë e një qasjeje holistike që kërkon përfshirjen afatgjatë të të gjithë aktorëve, përfshirë shtetet anëtare, të cilëve do t'u kërkohet të kontribuojnë në përputhje me përgjegjësitë e tyre.
Prania e lidhjeve pasive mund të përcaktohet duke ndërtuar një pozicion të ri të një zinxhiri të caktuar kinematik me një shkallë lirie zero (ose negative) për të njëjtat madhësi lidhjesh. Nëse qarku është i ndërtuar në pozicione të tjera, ai ka lidhje pasive. Nëse dimensionet nuk përshtaten së bashku në një pozicion të ri, atëherë ky është me të vërtetë një sistem fiks - një dërrasë (me një numër negativ të shkallëve të lirisë - bordi është statikisht i papërcaktuar).
Studiuesit, sektorët e prodhimit dhe shërbimeve në Evropë duhet të vazhdojnë të inovojnë dhe të bëjnë zgjedhjet e tyre strategjike me një synim të mesit të shekullit. Ata do të kenë nevojë për stimujt dhe investimet e duhura në kohën e duhur për të sjellë risitë e tyre në treg në Evropë dhe në botë. Rajonet dhe qytetet do të jenë gjithashtu lojtarë të rëndësishëm në gjetjen e zgjidhjeve të lëvizshmërisë me emetim të ulët, ku sfidat ndihen më mirë, dhe përfundimisht zgjedhja e gjinisë për përdoruesit e celularëve do të përcaktojë se sa të suksesshëm jemi ne.
Vetëm faleminderit veprim i përhershëm Nga të gjithë pjesëmarrësit, Evropa do të jetë në gjendje të transformojë me sukses sistemin e saj të transportit, i cili është vendimtar për prosperitetin e saj dhe mirëqenien e qytetarëve të saj. Kuadri Rregullator për Lëvizshmërinë e ulët të Emisioneve.
Shkallët shtesë të lirisë - nëse mekanizmi ka një lëvizje të ndonjë lidhjeje që nuk ndikon në lëvizjen e hallkave të tjera të këtij mekanizmi, atëherë ai jep një shkallë lirie shtesë.

Zakonisht, një shkallë shtesë lirie formohet në prani të një rul të rrumbullakët. Duke u rrotulluar rreth boshtit të vet, ai nuk ndryshon natyrën e lëvizjes së lidhjeve të mbetura.
Figura 5a tregon një mekanizëm me një rul jo rrethor - këtu pozicioni i shtytësit 2 do të varet jo vetëm nga pozicioni i kamerës, por edhe nga pozicioni i rulit. Kjo do të thotë, mekanizmi ka vërtet dy shkallë lirie. Në mekanizmin në figurën 5b, rul është i rrumbullakët dhe këndi i tij i rrotullimit nuk ndikon në pozicionin e shtytësit - pozicioni i shtytësit përcaktohet plotësisht nga pozicioni i kamerës.
Kështu, në fakt, mekanizmi ka një shkallë efektive lirie (rrotullimi i rulit rreth boshtit të vet zyrtarisht jep shkallën e dytë të lirisë, por kjo lëvizje nuk ndikon në lëvizjen e lidhjeve të mbetura të mekanizmit).
Kur hetoni një mekanizëm, është e përshtatshme të heqësh qafe një shkallë shtesë lirie. Për ta bërë këtë, është e nevojshme të zëvendësoni profilin praktik me një teorik - një profil të barabartë që kalon nëpër qendrën e rulit dhe të hiqni rulin nga shqyrtimi (Figura 5c).
Përcaktimi i shkallës së lëvizshmërisë së mekanizmit
Përcaktimi i shkallës së lëvizshmërisë së një zinxhiri kinematik hapësinor
Le të kemi n hallka nga të cilat është montuar zinxhiri kinematik. Ndërsa lidhjet nuk janë të lidhura në çifte kinematike, secila prej tyre ka gjashtë shkallë lirie (shkallë lirie). Prandaj, të gjitha lidhjet përpara se të bashkoheshin në një zinxhir kinematik kishin 6n shkallë lirie. Pas montimit të lidhjeve në një zinxhir kinematik, do të marrim çifte kinematike të klasave të ndryshme (me shkallë të ndryshme lëvizshmërie). Le të supozojmë se zinxhiri ynë kinematik ka çifte kinematike të të pesë klasave. Ne pranojmë shënimin e mëposhtëm:
P 5 - numri i çifteve kinematike të klasës së pestë në zinxhirin kinematik të formuar nga ne,
P 4 - numri i çifteve kinematike të klasës së katërt,
P 3 - numri i çifteve kinematike të klasës së tretë,
P 2 - numri i çifteve kinematike të klasës së dytë,
P 1 - numri i çifteve kinematike të klasës së parë.
Çdo çift kinematik kufizon lëvizjen e lidhjeve, u heq atyre aq shkallë lirie sa klasa e tij. Çdo çift kinematik i klasës së 5-të zgjedh 5 shkallë lirie nga lidhjet. Të gjitha çiftet e klasës së pestë do të hiqen nga lidhjet 5P 5 gradë lirie, klasa e katërt - 4P 4, e treta - 3P 3, e dyta - 2P 2, e para - 1P 1. Nëse të gjitha shkallët e humbura të lirisë zbriten nga numri i përgjithshëm i shkallëve të lirisë së lidhjeve 6n, marrim numrin e shkallëve të lirisë së zinxhirit kinematik W:
W \u003d 6n-5P 5 -4P 4 -3P 3 -2P 2 -1P 1. (një)
Shkalla e lëvizshmërisë së mekanizmitështë zakon të emërtoni numrin e koordinatave të pavarura që janë jashtëzakonisht të rëndësishme për t'u vendosur për të përcaktuar pozicionet e lidhjeve të mekanizmit në sistemin koordinativ të lidhur në mënyrë të ngurtë me raftin.
Mekanizmi ndryshon nga zinxhiri kinematik në atë që ka një lidhje të fiksuar plotësisht. Lidhja fikse humbi të gjashtë shkallët e lirisë. Prandaj, numri i lidhjeve lëvizëse në mekanizëm është n-1. Duke zëvendësuar në formulën (1) numrin e lidhjeve lëvizëse n-1, marrim një formulë për përcaktimin e shkallës së lëvizshmërisë së mekanizmit:
W=6(n-1)-5P 5 -4P 4 -3P 3 -2P 2 -1P 1 . (2)
Formula (2) u mor për herë të parë nga Malyshev për mekanizmat hapësinorë.
Konsideroni formulën Malyshev për përcaktimin e shkallës së lëvizshmërisë së mekanizmave të sheshtë. Të gjitha lidhjet e një mekanizmi të sheshtë mund të kenë tre shkallë lirie, dhe çiftet kinematike, përkatësisht, mund të kenë 1 ose 2 shkallë lirie. Nëse çiftet kinematike planare konsiderohen sipas klasave, atëherë ato janë vetëm të klasave të pesta dhe të katërta. Në të njëjtën kohë, është jashtëzakonisht e rëndësishme të merret parasysh se numri i përgjithshëm i shkallëve të lirisë së të gjitha lidhjeve të mekanizmit të sheshtë është 3 (n-1). Çiftet e klasës së pestë humbasin dy shkallë lëvizshmërie, e katërta - një. Kështu, shkalla e lëvizshmërisë së mekanizmit të sheshtë duhet të përcaktohet me formulën:
W=3(n-1)-2P 5 -P 4 . (3)
Formula (3) për përcaktimin e shkallës së lëvizshmërisë së një mekanizmi të sheshtë u mor për herë të parë nga P.L. Chebyshev.
Duke marrë parasysh varësinë e numrit të kushteve të përgjithshme të marrëdhënieve të vendosura nga mekanizmi, mekanizmat ndahen në familje.
Familjet e mekanizmave dhe formulat e tyre strukturore janë paraqitur në Tabelën 1.
Tabela 2.1 Formulat strukturore të familjeve të ndryshme të mekanizmave

Konsideroni zbatimin e formulës strukturore të P. L. Chebyshev në një shembull specifik. Figura 5 tregon një katër lidhje të artikuluar.
1e- lidhje- crank- kryen lëvizje rrotulluese rreth boshtit O ( kthesë e plotë);
2e- lidhja AB - shufra lidhëse - bën një lëvizje plan-paralele;
3e- lidhja BC - rrotullues (ose balancues) - kryen një lëvizje rrotulluese reciproke rreth boshtit C ( qarkullim jo të plotë);
4e- Lidhje OS - raft (krevat) - lidhje fikse.
Numri i lidhjeve n=4. Çiftet kinematike: 4-1, 1-2, 2-3, 3-4. Kemi 4 çifte me lëvizje të vetme 5 th klasës. Lëvizja relative e të gjitha lidhjeve është e sheshtë. Mekanizmi është i sheshtë. Ne përcaktojmë shkallën e lëvizshmërisë së tij sipas formulës së Chebyshev P. L.:
W=3(n-1)-2P 5 -P 4 =3(4-1)-2×4-0=1.
Mekanizmi ka një shkallë lëvizshmërie të barabartë me 1. Kjo do të thotë se mjafton të vendoset një koordinatë në çdo lidhje të mekanizmit në sistemin koordinativ të lidhur fort me kornizën për të përcaktuar pozicionet e të gjitha lidhjeve të tjera. Për shembull, në rastin tonë, mjafton të vendosim këndin e rrotullimit të manivelit j 1 .
 Lidhjet pasive dhe lidhjet e tepërta
Lidhjet pasive dhe lidhjet e tepërta
Lidhjet dhe çiftet kinematike, të cilat nuk ndikojnë në natyrën e lëvizjes së mekanizmit në tërësi quhen lidhje dhe çifte të tepërta (shtesë), kurse lidhjet e kushtëzuara prej tyre quhen lidhje pasive.
Gjatë përcaktimit të shkallës së lëvizshmërisë së mekanizmit, lidhjet e tepërta dhe çiftet kinematike nuk duhet të merren parasysh.
Në mekanizmat komplekse të shufrave, nuk është gjithmonë e mundur të përcaktohet shkalla e lëvizshmërisë me sy. Në këto raste, është jashtëzakonisht e rëndësishme të përdoret formula Chebyshev.
 Le të përcaktojmë W të mekanizmit të paralelogramit të dyfishtë (Figura 6). Këtu AB=BC=KM=MN; AN || BM || CK; AN=BM=CK dhe AC || K.N. Me një raport të tillë lidhjesh, mekanizmi ka W=1, d.m.th., mjafton të vendoset pozicioni i lidhjes 1 me këndin j 1 për të përcaktuar pozicionet e të gjitha lidhjeve të tjera. Nëse rregulloni lidhjen 1 në çdo pozicion, atëherë lidhjet e mbetura do të jenë të palëvizshme. Ne përcaktojmë W me formulën Chebyshev. Numri i lidhjeve - n=5, çifte kinematike 5 th klasa Р 5 =6, numri i çifteve kinematike të klasës së katërt - Р 4 =0.
Le të përcaktojmë W të mekanizmit të paralelogramit të dyfishtë (Figura 6). Këtu AB=BC=KM=MN; AN || BM || CK; AN=BM=CK dhe AC || K.N. Me një raport të tillë lidhjesh, mekanizmi ka W=1, d.m.th., mjafton të vendoset pozicioni i lidhjes 1 me këndin j 1 për të përcaktuar pozicionet e të gjitha lidhjeve të tjera. Nëse rregulloni lidhjen 1 në çdo pozicion, atëherë lidhjet e mbetura do të jenë të palëvizshme. Ne përcaktojmë W me formulën Chebyshev. Numri i lidhjeve - n=5, çifte kinematike 5 th klasa Р 5 =6, numri i çifteve kinematike të klasës së katërt - Р 4 =0.
W=3(n-1)-2P 5 -P 4 =3(5-1)-2×6-0=0.
Nëse W=0, atëherë nuk duhet të ketë një mekanizëm, por një fermë të ngurtë. Ne shohim se mekanizmi mund të kryejë lëvizje. Në rast se në këtë mekanizëm hiqni mendërisht lidhjen 5 (ose 2), atëherë natyra e lëvizjes së lidhjeve të mbetura do të mbetet e pandryshuar. Mekanizmi kthehet në një katër lidhje të zakonshme, W nga e cila kemi përcaktuar tashmë - W=1. Kur lidhja 5 eliminohet, 2 çifte kinematike eliminohen njëkohësisht: 5-1, 5-3. Rrjedhimisht, në këtë mekanizëm, një lidhje dhe dy çifte kinematike janë të tepërta.
 Konsideroni një shembull tjetër - mekanizmin Marcus, i përdorur shpesh si një makinë për një transportues lëkundës (Figura 7). Numri i lidhjeve n=6. Çiftet kinematike: 6-1, 1-2, 2-3, 2-4, 3-4, 3-6, 4-5, 5-6 të gjitha klasa e pestë R 5 = 8, R 4 = 0 .
Konsideroni një shembull tjetër - mekanizmin Marcus, i përdorur shpesh si një makinë për një transportues lëkundës (Figura 7). Numri i lidhjeve n=6. Çiftet kinematike: 6-1, 1-2, 2-3, 2-4, 3-4, 3-6, 4-5, 5-6 të gjitha klasa e pestë R 5 = 8, R 4 = 0 .
Ne përcaktojmë W me formulën Chebyshev:
W=3(n-1)-2P 5 -P 4 =3(6-1)-2×8-0=-1.
Sipas skemës së mekanizmit, shihet se do të funksionojë dhe W=1.
Le të mos ketë lidhje të drejtpërdrejtë të lidhjeve 2-3. Lidhjet 3, 4, 5 do të vazhdojnë të marrin një pozicion që korrespondon me këndin e rrotullimit j 1 të lidhjes 1, pasi lidhjet 1, 2, 4 duhet të fiksohen në këtë kënd. E njëjta gjë mund të merret nëse hiqet çifti kinematik 2-4 ose 4-3. Këtu një çift kinematik është i tepërt. Mund të injorohet. Pastaj:
W=3(6-1)-2×7=1.
Në të njëjtën kohë, vërejmë se eliminimi i lidhjes nënkupton eliminimin e disa çifteve kinematike.
Pritet në ref.rf
Eliminimi i çifteve kinematike (ndërprerja e kontaktit të lidhjeve) nuk sjell eliminimin e pashmangshëm të lidhjeve të përfshira në të.
Lidhja e lidhjeve, ku janë të lidhura 3 ose më shumë lidhje, quhet zakonisht nyje. Ka një çift kinematik në një nyje më pak se lidhjet.
 Çiftet dhe lidhjet e tepërta kinematike imponojnë kushte shtesë në saktësinë e prodhimit të mekanizmit, megjithatë, përkundër kësaj, një lidhje pasive ose një lidhje shtesë nganjëherë futet në mekanizëm për të marrë ndonjë cilësi shtesë të nevojshme; rritja e forcës, zvogëlimi i fërkimit etj.
Çiftet dhe lidhjet e tepërta kinematike imponojnë kushte shtesë në saktësinë e prodhimit të mekanizmit, megjithatë, përkundër kësaj, një lidhje pasive ose një lidhje shtesë nganjëherë futet në mekanizëm për të marrë ndonjë cilësi shtesë të nevojshme; rritja e forcës, zvogëlimi i fërkimit etj.
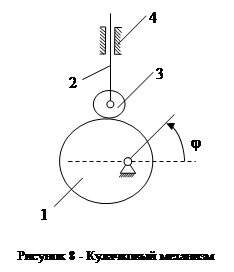
Le të përcaktojmë W të mekanizmit cam të paraqitur në figurën 2.8. Këtu lidhjet janë 1 - kamera, 2 - shtytës, 3 - rul, 4 - raft. Numri i lidhjeve n=4. Çiftet kinematike 1-4, 2-4, 2-3 të klasës së pestë dhe 3-1 - çifti më i lartë kinematik i sheshtë 4 th klasës.
Kur kamera rrotullohet përmes një këndi j, shtytësi do të marrë një pozicion të caktuar. Në pamje të parë W=1. Ne përcaktojmë W me formulën Chebyshev:
W=3(4-1)-2×3-2=2.
Këtu ka një shkallë shtesë lëvizshmërie. Nëse rul fiksohej me një shtytës, atëherë W e mekanizmit do të ishte e barabartë me një. Rrotullimi i rulit në lidhje me pjesën tjetër të lidhjeve nuk ka asnjë efekt. Këndi i rrotullimit të rulit është shkalla shtesë e lirisë së mekanizmit.
Një shkallë shtesë lirieështë zakon të quhet një shkallë e tillë lirie në lëvizjen e disa lidhjeve, eliminimi i të cilave nuk shkakton ndryshime në natyrën e lëvizjes së lidhjeve të tjera për konsiderata kinematike.
Kjo i referohet lëvizjes absolute ose relative të lidhjes. Eliminimi i një shkalle shtesë lirie nuk nënkupton eliminimin e lidhjes.
Para se të përdorni formulën Chebyshev, është jashtëzakonisht e rëndësishme të përjashtoni mendërisht kufizimet pasive dhe shkallët shtesë të lirisë nga konsiderata.
Formula Chebyshev në përgjithësi jep përgjigjen e saktë. Në raste të përgjithshme, lidhjet pasive dhe shkallët shtesë të lirisë nuk ekzistojnë dhe ekzistojnë vetëm në raste të veçanta.
Për shembull: mekanizmi i paralelogramit të dyfishtë është një rast i veçantë i të njëjtit mekanizëm kur lidhjet nuk janë paralele (Figura 9a); mekanizmi Marcus është një rast i veçantë i mekanizmit, kur akset e nyjeve të kthyeshme të lidhjeve 2, 4 nuk përkojnë (Figura 9b); një rul i rrumbullakët është një rast më i veçantë i formës gjeometrike të një rul forme e rrumbullaket(Figura 9c).
Kështu, formula Chebyshev bën të mundur identifikimin karakteristikat(në veçanti) mekanizmat.
Përcaktimi i shkallës së lëvizshmërisë së mekanizmit - koncepti dhe llojet. Klasifikimi dhe veçoritë e kategorisë "Përcaktimi i shkallës së lëvizshmërisë së mekanizmit" 2014, 2015.





