Mexanizmlarning strukturaviy tahlili. Kinematik juftlik
Kinematik juftlik tushunchasi
Kinematik juftlik ikki zvenoning harakatlanuvchi tutashuvi deyiladi. Kinematik juftliklar turli mezonlarga ko'ra tasniflanadi:
1) kinematik juftlikda bog'langan zvenolarning nisbiy harakati ustiga qo'yilgan bog'lanishlar soniga ko'ra. Shu asosda kinematik juftliklar sinflarga bo'linadi. Quyidagi belgilar qabul qilinadi:
W - erkinlik darajalari soni
S - bog'lanishlarning nisbiy harakati ustiga qo'yilgan bog'lanishlar soni.
Kosmosdagi erkin aloqa oltita erkinlik darajasiga ega. Bog'lanishlar ulanganda, ushbu erkinlik darajalarining bir qismi olib tashlanadi ("bog'lanishlar o'rnatiladi"). Bog'lanishlarning nisbiy harakatida o'rnatilgan bog'lanishlar soni va qolgan erkinlik darajalari o'rtasidagi bog'liqlik aniq:
yoki
S=6–W,
Shunday qilib, kinematik juftlarning beshta sinfi mavjud (agar siz barcha oltita erkinlik darajasini olib tashlasangiz, siz qattiq ulanishga ega bo'lasiz).
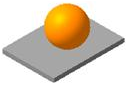
2-rasmda ba'zi kinematik juftliklarga misollar ko'rsatilgan.
| a) |
S \u003d 1 \u003d\u003e I sinf.
|
S \u003d 2 \u003d\u003e II sinf.
|
S \u003d 3 \u003d\u003e III sinf.
|
 b)
b)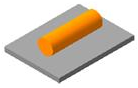 ichida)
ichida)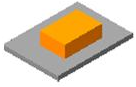 G)
G)2-rasm
To'p tekislikka nisbatan (2b-rasm), uni tark etmasdan, barcha uchta koordinata o'qi atrofida aylanish harakatlarini amalga oshirishi, shuningdek, "X" va "Y" o'qlari bo'ylab harakatlanishi mumkin. "Z" o'qi bo'ylab harakatlanayotganda, to'p samolyotdan tushadi, ya'ni. ikkita bepul havola bo'ladi - kinematik juftlik mavjud bo'lishni to'xtatadi. Shunday qilib, bitta ulanish bog'lanishlarning nisbiy harakatiga o'rnatiladi - bu I sinf kinematik juftlik.
Xuddi shunday, kontaktning tabiatini buzmasdan, silindrni "Z" o'qi bo'ylab harakatlantirish va "Y" o'qi atrofida aylantirish mumkin emas (2c-rasm), ya'ni. obligatsiyalar soni ikkita - sinf II juftligi. Boshqa tekislikka nisbatan tekislik "X" va "Y" o'qlari bo'ylab translyatsion ravishda harakatlanishi mumkin, shuningdek, kontaktning tabiatini buzmasdan "Z" o'qi atrofida aylanishi mumkin. Mumkin emas oldinga harakat"Z" o'qi bo'ylab va "X" va "Y" o'qlari atrofida aylanish harakatlari (2d-rasm). Shunday qilib, bog'lanishlar soni uchta - sinf III kinematik juftlik.
Eslatma: agar kinematik juftlik ikkita funktsiyaga ega bo'lsa bog'liq harakatlar(birisiz ikkinchisi mavjud bo'lmaydi), ular bir daraja erkinlik beradi.
Misol uchun, murvat va gayka beshinchi sinfning kinematik juftligini tashkil qiladi. Bunday holda, sobit murvat bilan gaykaning ikkita harakati mavjud - murvat o'qi atrofida aylanish harakati va bu o'q bo'ylab tarjima harakati, lekin siz gaykani o'q bo'ylab aylantirmasdan harakatlantira olmaysiz yoki gaykani shunday aylantira olmaysiz. u eksa bo'ylab harakat qilmaydi. Bundan tashqari, ipning parametrlarini bilib, burilish burchagi va gaykaning tarjima harakati o'rtasidagi munosabatni aniqlash oson.
Bu ikki harakat bitta murakkab (bu holda spiral) harakatni hosil qiladi. Bu bog'lanishlarning nisbiy harakatida bir erkinlik darajasini belgilaydi, ya'ni. havolalar soni - beshta;
2) kinematik juftlikda bog'langan zvenolarning kontakt xarakteriga ko'ra. Shu asosda kinematik juftliklar yuqori va pastki qismlarga bo'linadi. Yuqori juftliklar ushbu kinematik juftlikni tashkil etuvchi bog'lanishlarning nuqta yoki chiziqli kontaktiga ega.
Pastki juftlikda bo'g'inlar ba'zi bir sirt bo'ylab (muayyan holatda, tekislik bo'ylab) bir-biri bilan aloqa qiladi.
Pastki kinematik juftliklar katta yuk ko'tarish qobiliyatiga ega, tk. katta aloqa maydoniga ega (yuqori juftlikda aloqa maydoni nazariy jihatdan nolga teng, lekin aslida u kinematik juftlik elementlari - "aloqa joyi" tufayli olinadi). Ammo pastki juftliklarda bitta sirt. ish paytida boshqasiga nisbatan siljiydi, yuqori juftlarda esa u ham sirpanish, ham dumalab turishi mumkin.
Qoidaga ko'ra, toymasin qarshilik bir sirtni boshqasiga nisbatan siljitish qarshiligidan kattaroqdir, ya'ni. Yuqori juftlikdagi ishqalanish yo'qotishlari (faqat dumaloq ishlatilsa) pastki juftlikdan kamroq (shuning uchun koeffitsientni oshirish uchun) foydali harakat silliq rulmanlar odatda rulmanlar bilan almashtiriladi).
2b va 2c-rasmlarda ko'rsatilgan kinematik juftliklar eng yuqori, 2d-rasmdagi juftlik esa eng past kinematik juftlikdir;
3) kinematik juftlikni tashkil etuvchi zvenolarga mansub nuqtalarning harakat traektoriyasi bo'ylab. Shu asosda fazoviy va tekis kinematik juftliklar ajratiladi.
Yassi kinematik juftlikda barcha nuqtalar bir yoki parallel tekislikda harakatlanadi va ularning harakat traektoriyalari tekis egri chiziqlardir. Fazoviy juftliklarda nuqtalar turli tekisliklarda harakatlanadi va fazoviy egri shaklida traektoriyalarga ega.
Amalda qo'llaniladigan mexanizmlarning katta qismi tekis mexanizmlardir (I.I.Artobolevskiy tasnifiga ko'ra - uchinchi oila mexanizmlari), shuning uchun tekis kinematik juftlarni batafsilroq ko'rib chiqish kerak.
Tekislikda joylashtirilgan erkin zveno uch erkinlik darajasiga ega (koordinata o'qlari bo'ylab translatsion harakat va berilgan tekislikka perpendikulyar o'q atrofida aylanish harakati). Shunday qilib, havolani tekislikka joylashtirish undan uch darajadagi erkinlikni olib tashlaydi (uchta bog'lanishni o'rnatadi). Ammo bu bog'lanishning kinematik juftlikdagi boshqasi bilan bog'lanishi nisbiy harakatga ko'proq bog'lanishlarni keltirib chiqaradi (minimal raqam 1). Natijada, nisbiy harakatda ikki yoki bir daraja erkinlikka ega bo'lgan tekislikda faqat kinematik juftliklar mavjud bo'lishi mumkin.
Umumiy tasnifga ko'ra, bu to'rtinchi va beshinchi sinflarning juftliklari. Beshinchi sinfning eng oddiy juftlari faqat bitta harakatni ta'minlaydi - aylanish yoki translatsiya (texnologiyada aylanma kinematik juftlik ilgak deb ataladi, tarjima juftligi tarjimali harakatlanuvchi havolaga o'xshab, ba'zan slayder deb ham ataladi).
Tekislikdagi nisbiy harakatdagi ikki erkinlik darajasi odatda ikkita aloqa profilini ta'minlaydi (kinematik diagrammada bir nuqtada aloqa; haqiqiy mexanizmda bu nuqtaga proyeksiya qilingan chiziq bo'lishi mumkin). Shunday qilib, beshinchi sinfning tekis kinematik juftlari (menteşeler va slayderlar) bir vaqtning o'zida pastki juftliklar va to'rtinchi sinfning kinematik juftlari yuqori juftliklardir.
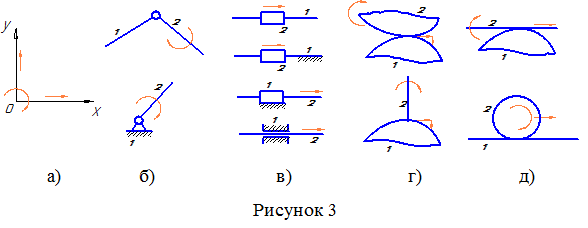
3-rasmda tekis kinematik juftlarning sxematik ko'rinishi ko'rsatilgan.
4) kinematik juftlikda bog'langan zvenolarning yopilish xususiyatiga ko'ra. Bu jihatdan bir-biridan farq qiluvchi ikki turdagi kinematik juftliklar mavjud. Geometrik yopilgan kinematik juftliklar va kuch bilan yopilgan kinematik juftliklar.
Ijobiy qulflash bilan juftliklarda, ulanishlarning konfiguratsiyasi ularni ish paytida ajratishni oldini oladi. Misol uchun, birlashtiruvchi novda qopqog'i yoki boshqa har qanday ilgaklar (qobiqli eshik, deraza oynasi bo'lgan deraza va boshqalar) yordamida krank miliga ulash novdasini ulash.
Quvvat pallasida juftlikda ish paytida ulanishlarning aloqasi doimiy ravishda ta'minlanadi faol kuch. 2-rasmda barcha kinematik juftliklar kuch bilan yopilgan juftlikdir va og'irlik yopilish kuchi sifatida ishlaydi. Agar og'irlik etarli bo'lmasa, unda bosim kuchini yaratish uchun odatda turli xil elastik elementlar (ko'pincha buloqlar) ishlatiladi.
Kinematik juftlik
aloqa shartlariga ko'ra ularning nisbiy harakatiga cheklovlar qo'yadigan ikkita qattiq bo'g'inning harakatlanuvchi konjugasiyasi. Bog'lanish shartlarining har biri bir darajadagi erkinlikni yo'q qiladi ,
ya'ni fazoda 6 ta mustaqil nisbiy harakatdan birining imkoniyati. To'g'ri burchakli koordinatalar tizimida 3 ta translatsiya harakati (3 ta koordinata o'qi yo'nalishi bo'yicha) va 3 ta aylanish harakati (bu o'qlar atrofida) mumkin. Aloqa shartlari soniga ko'ra S K. p.lar 5 ta sinfga boʻlingan. Erkinlik darajalari soni K. p. W=6-S. Har bir sinf doirasida K. buyumlari boʻgʻinlarning qolgan mumkin boʻlgan nisbiy harakatlariga koʻra turlarga boʻlinadi. Bog'lanishlarning aloqa tabiatiga ko'ra, pastki K. p.lar - sirt bo'ylab aloqa bilan va yuqoriroq - chiziqlar bo'ylab yoki nuqtalarda aloqa bilan ajralib turadi. Yuqori K. ashyolari barcha 5 sinf va koʻp turlar uchun mumkin; pastki - faqat 3 sinf va 6 tur ( 1-rasm
). Shuningdek, geometrik jihatdan yopiq va yopiq bo'lmagan c.p. guruch. bitta
), ikkinchidan, yopish uchun bosim kuchi kerak, deb ataladi. kuch bilan yopish (masalan, kamera mexanizmida). An'anaviy ravishda, bir nechta oraliq prokat elementlari (masalan, sharli va rulmanli podshipniklar) va oraliq deformatsiyalanuvchi elementlari (masalan, tekis buloqli qurilmalarning teskari tebranishsiz menteşalari deb ataladigan) bilan harakatlanuvchi muftalar k deb ataladi. guruch. 2
). N. Ya. Niberg.
Katta Sovet ensiklopediyasi. - M.: Sovet Entsiklopediyasi. 1969-1978 .
Boshqa lug'atlarda "Kinematik juftlik" nima ekanligini ko'ring:
Mexanizmning 2 ta bo'g'inining ulanishi, ularning nisbiy harakatlanishiga imkon beradi. Bog'lanishlar sirtga tegib turadigan kinematik juftlik pastki deb ataladi (masalan, aylanma menteşe, translatsiya slayderi va yo'riqnoma). Kinematik juftlik, ...... Katta ensiklopedik lug'at
kinematik juftlik- juftlik Ikki qo'shni bo'g'inning ulanishi, ularning nisbiy harakatlanishiga imkon beradi. [Tavsiya etilgan shartlar toʻplami. 99-son. Mexanizmlar va mashinalar nazariyasi. SSSR Fanlar akademiyasi. Ilmiy-texnik terminologiya qo'mitasi. 1984] Mavzular nazariyasi ...... Texnik tarjimon uchun qo'llanma- kinematinė pora statusas T sritis fizika atitikmenys: angl. kinematik juftlik vok. kinematisches Elementenpaar, n rus. kinematik juftlik, f pranc. paaire cinématique, f … Fizikos terminų žodynas
Ikki qo'shni bog'lanishning ulanishi, ularni bog'lash imkonini beradi. tirbandlik. Bog'lanish boshqa havola bilan aloqa qilishi mumkin bo'lgan yuzalar, chiziqlar, nuqtalar deyiladi. ulanish elementlari. K. p. pastki (kontakt yuzalar) va yuqori ... ... bo'linadi. Katta ensiklopedik politexnika lug'ati
kinematik juftlik- kinematik juftlik Mexanizmning ikkita qattiq tanasining ulanishi, ularning berilgan nisbiy harakatini ta'minlaydi. Kod IFToMM: 1.2.3 Bo'lim: MEXANIZMLAR VA MOSHINALAR NAZARIYASI HAQIDA UMUMIY TUSHUNCHALAR ... Mexanizmlar va mashinalar nazariyasi
juft- kinematik juftlik; juft Ikki qoʻshni boʻgʻinning ulanishi, ulardan nisbiy harakatlanish imkonini beradi. juft kuchlar; juftlik tizimi ikkinchi parallel kuchlar, mutlaq qiymatda teng va qarama-qarshi yo'nalishda yo'naltirilgan ...
yuqori juftlik- kinematik juftlik, unda bog'lanishlarning kerakli nisbiy harakatini faqat uning elementlarini chiziqlar bo'ylab va nuqtalarda tegizish orqali olish mumkin ... Politexnik terminologik izohli lug'at
Kinematik juftlik tomonidan ruxsat etilgan bo'g'inlarning nisbiy harakatining tabiati ularning aloqa nuqtalarida bo'g'inlar shakliga bog'liq.
Ikkala havolaning har birida mumkin bo'lgan aloqa shakllari to'plami element kinematik juftlik. Kinematik juftlikning elementi bo'lishi mumkin nuqta , chiziq , sirt.
Elementi bo'lgan kinematik juftliklar nuqta yoki chiziq , deyiladi yuqoriroq ; kinematik juftliklar, ularning elementi sirt , chaqirdi pastroq .
Aloqa bo'g'inlaridan birining (yoki ikkalasining) geometriyasiga qarab, kinematik juftliklar farqlanadi: sferik, konusning, silindrsimon, planar, spiral.
Kinematik juftlik tomonidan ruxsat etilgan bo'g'inlarning nisbiy harakatining tabiatiga ko'ra, aylanish (B), tarjima (P), aylanish (B + P) va VP ning vida harakati bilan farqlanadi. . B + P va VP tipidagi juftliklarning farqi shundaki, birinchisida nisbiy harakatlar (aylanma va translatsiya) mustaqil bo'lsa, ikkinchisida bir harakat ikkinchisiz amalga oshirilmaydi.
Amalda bir xil sirt, chiziq yoki nuqta bo'ylab aloqada bo'lgan juft juftliklar bilan bir qatorda, bir nechta kontaktli juftliklar qo'llaniladi. Bu yoki o'zaro ta'sir elementlarining takrorlanishi (shpalli, ko'p ishga tushirish vintlari, tishli juftliklar) yoki sirt va chiziq bo'ylab bir vaqtning o'zida aloqa qilish (pinli sferik juftlik), silindrsimon va tekis yuzalar bo'ylab (surma kaliti bilan juftlik) ). Bog'lanishlar orasidagi aloqaning takrorlanishi har xil turdagi juftlarning ekvivalentligini tavsiflaydi. Uch nuqtali kontaktga ega bo'lgan juftlik bog'lanishlar harakatining tabiati bo'yicha tekislik yoki sferik pastki juftlikka teng bo'lishi mumkin.
Uchun qattiq tana, kosmosda erkin harakatlanadigan, erkinlik darajalari soni (mexanik tizimning bir-biridan mustaqil bo'lishi mumkin bo'lgan harakatlari soni) oltita: o'qlar bo'ylab uchta translatsiya. X, Y, Z va bu o'qlar atrofida uchta aylanish (2.1-rasm ).
Kinematik juftlikka kiritilgan bog'lanishlar uchun erkinlik darajalari soni har doim oltidan kam bo'ladi, chunki aloqa shartlari (bog'lar) bir bo'g'inning boshqasiga nisbatan mumkin bo'lgan harakatlari sonini kamaytiradi: bir bo'g'in boshqasiga kira olmaydi va harakatlana olmaydi. undan uzoqda.
Umumiy holatda har bir kinematik juftlik zvenolarning nisbiy harakatiga S bog'lanishlarni o'rnatadi, bu esa zvenolarning H=6 - S nisbiy harakatlarini ta'minlaydi. Ustlangan bog'lanishlar soniga qarab S (qolgan erkinlik darajalari H) kinematik juftlarning 5 klassi ajratiladi. Kinematik juftlarning bunday tasnifi I.I.Artobolevskiy tomonidan taklif qilingan (2.1-jadval).
2.2-2.4-jadvallarda kinematik juftlarni loyihalash misollari keltirilgan. 2.2 va 2.4-jadvallarda ko'rsatilgan juftliklar bo'g'inlarning ishqalanishi va deformatsiyasi yo'q degan taxminga asoslanib tasniflanadi. Ishqalanish, ishqalanish viteslarida alohida juftlarni ishlatishga imkon beradi. Deformatsiyani hisobga olgan holda, nuqta aloqasi bo'lgan juftliklar sirt aloqasi bilan juftlarga aylantirilishi mumkin.
2.1-jadval
Kinematik juftlarning turlari
Eʼlon qilingan /
KIRISH
1.Mexanizmlar nazariyasidagi asosiy tushunchalar va ta’riflar
3. Kinematik zanjirlar
ADABIYOT
KIRISH
Nazorat ishining mavzusi “Mexanizmlar va mashinalar nazariyasi” fanidan “Mexanizmlarning strukturaviy tahlili”.
Ishning maqsadi: mexanizmlarning tarkibiy tahlili bo'yicha bilimlarni shakllantirish.
Ishning vazifalari: mexanizmlarni shakllantirish tamoyillari va ularni tasniflash tizimi bilan tanishish.
Mavzuning asosiy savollari:
Mexanizmlar nazariyasidagi asosiy tushunchalar va ta'riflar;
Kinematik juftliklar va ularning tasnifi;
Kinematik zanjirlar;
Yassi kinematik zanjirning harakatchanlik darajasi;
Mexanizmlarni shakllantirish printsipi.
Mexanizmlar nazariyasidagi asosiy tushunchalar va ta'riflar
Mexanizmlar va mashinalar nazariyasi mexanizm va mashinalarning tuzilishi, kinematikasi va dinamikasini o'rganadi.
Mexanizm - bu bir yoki bir nechta jismlarning harakatini boshqa jismlarning zarur harakatlariga aylantirish uchun mo'ljallangan sun'iy ravishda yaratilgan jismlar tizimi.
Mexanizmni tashkil etuvchi qattiq jismlar zvenolar deyiladi.
Bir qattiq harakatlanuvchi jismlar tizimini tashkil etuvchi har bir harakatlanuvchi qism yoki qismlar guruhi mexanizmning harakatlanuvchi bo'g'ini deb ataladi.
Barcha qo'zg'almas qismlar qattiq bog'lanish yoki raft deb ataladigan bir qattiq qo'zg'almas jismlar tizimini tashkil qiladi.
Shuning uchun har qanday mexanizm bitta qo'zg'almas va bir yoki bir nechta harakatlanuvchi bo'g'inlarga ega.
Ikki kontaktli bo'g'inlarning nisbiy harakatlanishiga imkon beruvchi ulanishi kinematik juftlik deb ataladi.
Bog'lanishning kinematik juftlikni tashkil etuvchi boshqa zveno bilan aloqa qilishi mumkin bo'lgan sirtlari, chiziqlari, nuqtalari bog'lanish elementlari deb ataladi.
Bir-biri bilan kinematik juftliklar hosil qiluvchi bog'langan bog'lanishlar tizimi kinematik zanjir deyiladi.
Mexanizm - kerakli harakatni amalga oshirish uchun ishlatiladigan kinematik zanjir mavjud.
Mashinani tashkil etuvchi mexanizmlar xilma-xildir. Funktsional maqsadlari nuqtai nazaridan mashina mexanizmlari quyidagi turlarga bo'linadi:
a) dvigatellar va konvertorlar mexanizmlari:
vosita mexanizmlari har xil turdagi energiyani mexanik ishlarga aylantiradi;
konvertor mexanizmlari mexanik ishlarni energiyaning boshqa turlariga aylantirishni amalga oshiradi;
b) harakatni dvigateldan texnologik mashinaga yoki ijro etuvchi organga o'tkazadigan uzatish mexanizmlari;
c) qayta ishlangan muhit yoki ob'ektga bevosita ta'sir ko'rsatadigan aktuatorlar;
d) texnologik jarayonni boshqaruvchi boshqaruv, nazorat va tartibga solish mexanizmlari, nazorat va boshqalar;
e) ommaviy mahsulot ishlab chiqaradigan mashinalarda avtomatik hisoblash, tortish va qadoqlash mexanizmlari.
2. Kinematik juftliklar va ularning tasnifi
Juftlikning asosiy xususiyati - bog'langan havolalarning nisbiy o'rnini aniqlash uchun ishlatilishi mumkin bo'lgan geometrik parametrlar soni. Misol uchun, inqilob yuzasiga tegib turganda, bog'lamlarning nisbiy holati faqat bitta parametrni - aylanish o'qiga perpendikulyar tekislikdagi zvenolarning nisbiy aylanish burchagini o'rnatish orqali to'liq aniqlanadi.
Sferik sirtga teginishda allaqachon uchta parametr mavjud - bular sharning markazida kesishgan uchta o'zaro perpendikulyar o'q atrofida aylanish burchaklari.
Binobarin, kinematik juftlik elementlari har ikkala zveno nuqtalarining koordinatalarini ma'lum bir tarzda bog'lab, zvenolarning nisbiy harakatiga ba'zi cheklovlar qo'yadi.
Kinematik juftlik elementlarining juftlikni tashkil etuvchi zvenolarning nisbiy harakatiga qo’yadigan cheklashlar cheklashlar, bu cheklanishlarni ifodalovchi boshqaruv elementlari esa cheklash tenglamalari deyiladi.
Keling, kinematik juftlik bo'g'inlarining nisbiy harakatiga qanday bog'lanishlar va qanday miqdorda qo'llanilishi mumkinligini ko'rib chiqaylik.
Ma'lumki, umumiy holatda kosmosda erkin harakatlanadigan har qanday mutlaqo qattiq jism olti erkinlik darajasiga ega:
X, Y, Z o'qlari atrofida uchta aylanish va bir xil o'qlar bo'ylab uchta tarjima harakati.
Kinematik juftlik zvenosining nisbiy harakatiga qo'yilgan cheklovlar bo'g'inlarning erkin holatda bo'lishi mumkin bo'lgan nisbiy harakatlarini cheklaydi.
Ushbu cheklashlar natijasida erkin harakatlanuvchi zvenoning oltita mumkin bo'lgan nisbiy harakatlaridan ba'zilari unga bog'langan bo'ladi. Qolgan mustaqil mumkin bo'lgan harakatlar kinematik juftlik bo'g'inlarining nisbiy harakatida erkinlik darajalari sonini aniqlaydi.
Kinematik juftliklar, uning bog'lanishlarining nisbiy harakatiga bog'liq bo'lgan ulanish shartlari soniga qarab, besh sinfga bo'linadi:
I sinf juftligi - (1-rasm a) beshta harakatlanuvchi juftlik, beshga teng bo'lgan bog'lanishlarning bir qator erkinlik darajalariga va 1 ga teng ulanish shartlari soniga ega;
II sinf juftligi - (1b-rasm) to'rtta harakatlanuvchi juftlik, kinematik juftlik aloqasining erkinlik darajalari soni to'rtta, ulanish shartlari soni 2;
III sinf juftligi - (1-rasm c, i, d) uch harakatlanuvchi juftlik, kinematik juftlik aloqasining erkinlik darajalari soni uchta, ulanish shartlari soni 3;
IV sinf juftligi - (1-rasm e, i, f) ikki harakatlanuvchi juftlik, bog'lanishning erkinlik darajasi soni 2, ulanish shartlari soni 4;
V sinf jufti (1-rasm g, h. i) bir harakatlanuvchi (aylanuvchi juft), zvenoning erkinlik darajalari soni birga teng, ulanish shartlari soni 5 ta.
Kinematik juftliklar fazoviy va tekis bo'linadi. Fazoviy kinematik juftliklar nisbiy harakatdagi bog'lanish nuqtalari fazoviy egri chiziqlarni tasvirlaydigan juftliklardir. Planar kinematik juftliklar bunday juftliklar deb ataladi, ularning bog'lanish nuqtalari nisbiy harakatda parallel tekisliklarda harakatlanadi, ya'ni. ularning traektoriyalari tekis egri chiziqlardir. Zamonaviy mashinasozlikda bog'lanishlari IV va V sinflar juftligiga kiritilgan tekis mexanizmlar ayniqsa keng qo'llaniladi.
Kinematik juftliklar bo'g'inlarning aloqa tabiati bilan ham farqlanadi. Agar kinematik juftlikning elementlari shunday bo'lsa, bog'lanishlarning har bir nisbiy holatida ular sirtda aloqada bo'lsa, u holda bu juftlik eng past deb ataladi. Agar teginish alohida nuqtalarda yoki chiziqlar bo'ylab sodir bo'lsa, u holda juftlik eng yuqori deb ataladi.
Pastki juftlikni tashkil etuvchi zvenolarning nisbiy harakati bilan ularning aloqa sirtlari bir-birining ustiga siljiydi. Agar bo'g'inlar yuqoriroq juftlik hosil qilsa, ularning nisbiy harakati juftlik elementlarining siljishi bilan ham, ularsiz ham - dumalab ketishi mumkin.
3. Kinematik zanjirlar
Bog'lanishlarning nisbiy harakatining tabiatiga ko'ra kinematik zanjirlar tekis va fazoviy bo'linadi. Kinematik zanjir, agar uning bog'lanish nuqtalari parallel tekisliklarda yotgan traektoriyalarni tasvirlasa, tekis deyiladi. Kinematik zanjir fazoviy deb ataladi, agar uning bo'g'inlari nuqtalari tekis bo'lmagan traektoriyalarni yoki kesishgan tekisliklarda yotuvchi traektoriyalarni tasvirlasa.
Kinematik zanjirlarga kiradigan bog'lanishlar turiga ko'ra, ikkinchisi oddiy va murakkab bo'linadi.
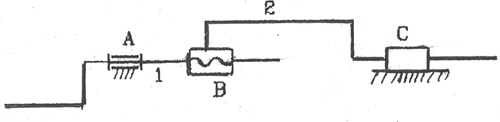
Oddiy zanjir - har bir bo'g'in ikkitadan ko'p bo'lmagan kinematik juftlikka kiritilgan bunday zanjir (2-rasm).
Murakkab kinematik zanjir - ikkitadan ortiq kinematik juftliklarga kiritilgan kamida bitta bo'g'in mavjud bo'lgan zanjir (3-rasm).
2-rasm 3-rasm
Kinematik zanjir yopiq zanjir deb ataladi, uning har bir bo'g'ini ikki yoki undan ortiq kinematik juftlarga kiradi.
Ochiq kinematik zanjir - bu kinematik zanjir bo'lib, unda faqat bitta kinematik juftlik tarkibiga kiradigan bo'g'inlar mavjud.
Teng miqdordagi harakatlanuvchi rishtalar bilan yopiq zanjirlar ochiq zanjirlarga qaraganda kamroq erkinlik darajasiga ega. Yopiq sxemalar ishlaydigan mashinalar, stanoklar, avtomatik mashinalar va boshqalarning kinematik sxemalarida, ochiq sxemalar - manipulyatorlar va robotlarning sxemalarida keng qo'llaniladi.
Mashinalarda odatda bunday kinematik zanjirlar qo'llaniladi, unda bog'lanishlardan biri harakatsiz, ya'ni. stend hisoblanadi. Masalan, ichki yonuv dvigatelining mexanizmida krank, ulash novda, porshen va silindr kinematik zanjir hosil qiladi, bunda dvigatel ramasi bo'lgan silindr qo'zg'almas bo'g'in (raf) hisoblanadi (4-rasm, a, b).
Mexanizmning uni harakatga keltiruvchi tashqi kuchlar ta'sirida bo'lgan bo'g'ini yetakchi bo'g'in deyiladi. Foydali qarshiliklar qo'llaniladigan bo'g'in, uni bartaraf etish uchun mexanizm qurilgan bo'lib, harakatlanuvchi bo'g'in deb ataladi.
Shakl 4 a shakl 4 b
Mexanizmning kinematikasini o'rganishda zvenolardan birining harakati berilgan deb hisoblanadi. U kirish deyiladi. Kirishning harakatiga qarab harakatini aniqlamoqchi bo'lgan havola chiqish deyiladi. Bizning misolimizda slayder chiqish bo'g'ini, krank esa kirish bo'g'inidir.
4. Yassi kinematik zanjirning harakatchanlik darajasi
kinematik bug 'zanjirining tekis mexanizmi
Tekis-parallel harakat paytida har bir erkin jism uch erkinlik darajasiga ega, shuning uchun K-bog'lanishlarini kinematik juftlarga ulashdan oldin ularning barchasi 3K erkinlik darajasiga ega edi.
Bog'lanishlarni kinematik juftlarga ulashda ikkinchisi ulardan ma'lum miqdordagi erkinlik darajasini olib tashlaydi: tekis mexanizmlardagi V-sinf juftlari ikkita erkinlik darajasini (uchtadan) olib tashlaydi va bittasini qoldiradi; IV sinf juftlari bir daraja erkinlikni olib tashlab, ikkitasini qoldiradi.
Shunday qilib, tekis kinematik zanjir quyidagi erkinlik miqdoriga ega bo'ladi:
H = 3K - 2p1 - p2
Agar kinematik zanjirning bir bo'g'ini sobit bo'lsa, erkinlik darajalari soni yana uchtaga kamayadi va qo'zg'almas zanjirga nisbatan quyidagilarga teng bo'ladi:
W = H - 3 yoki W=3(k-1) - 2p1 - p2
K - 1 \u003d n (harakatlanuvchi havolalar soni) ni belgilab, biz nihoyat olamiz:
W = 3n - 2p1 - p2
n - kinematik zanjirning harakatlanuvchi bo'g'inlari soni;
p1 - yuqori juftliklar soni (bitta ulanish sharti bilan qoplangan);
p2 - kinematik zanjirdagi pastki juftliklar soni (har birida ikkita ulanish sharti mavjud).
Shunday qilib, dvigatelning kinematik zanjirida 3 ta harakatlanuvchi bo'g'in, 3 juft aylanish va 1 tarjima juftligi, jami 4 ta pastki juft mavjud. Shunday qilib, uning uchun
W = 3 3 - 2 4 =1
Kinematik zanjirning qo'zg'almas zvenoga nisbatan erkinlik darajalari soni W kinematik zanjirning harakatchanlik darajasi deyiladi.
Kinematik zanjirning harakatchanlik darajasini aniqlash formulasini birinchi marta 1869 yilda mashhur rus olimi P.L.Chebishev olgan va uning nomi bilan atalgan. Ushbu formula faqat tekis kinematik zanjirlar uchun javob beradi.
Ushbu raqamlarning turli kombinatsiyalarini hisobga olgan holda, har xil turdagi guruhlarni olish mumkin. Shu tarzda olingan barcha guruhlarni sinflarga bo'lish mumkin.
Yassi mexanizmlarning strukturaviy tasnifini ko'rib chiqing.
V sinfning kinematik juftligini tashkil etuvchi yetakchi zveno va stendni shartli ravishda I sinf mexanizmi deb ataymiz (5-rasm).
Har qanday planar mexanizmning shakllanishi boshlang'ich mexanizmga W = 0 shartini qondiradigan bog'lanishlar guruhlarining ketma-ket biriktirilishi sifatida ifodalanishi mumkin.
yetakchi havola yetakchi havola
5-rasm
Masalan, birinchi guruh (6.a-rasm) bitta I sinf mexanizmiga (etakchi zveno va rack) biriktirilgan bo'lsa, keyingi guruh birinchi guruhning bo'g'inlariga yoki qisman birinchi guruhning zvenolariga bog'langan. va yetakchi havola yoki tokchaga va hokazo.
I sinf mexanizmiga bir nechta guruhlarning biriktirilishi natijasida hosil bo'lgan mexanizmlar, xuddi mexanizmning o'zi kabi, birga teng harakatchanlik darajasiga ega, chunki guruhlar o'zlari biriktirilgan mexanizmning harakatchanlik darajasini o'zgartirmaydi.
Mexanizmlar guruhlarni bir vaqtning o'zida bir nechta I sinf mexanizmlariga qo'shish orqali ham tuzilishi mumkin (6.b-rasm). Bunday hollarda, olingan mexanizmlarning harakatchanlik darajasi bunday guruhlar biriktirilgan I sinf mexanizmlari soniga teng bo'ladi, ya'ni. hosil bo'lgan mexanizmning etakchi bo'g'inlari soni.
a) 2 – yetakchi bo‘g‘in b) 2 va 5 – yetakchi bo‘g‘inlar
Guruch. 6
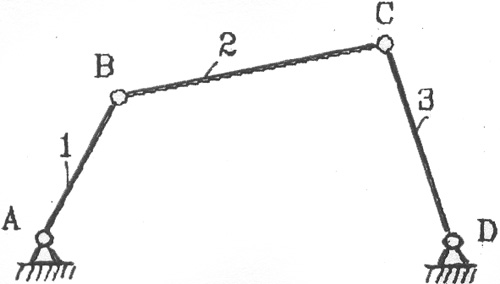
Ikki zveno va uch juft V sinfga ega bo'lgan zvenolar guruhi (7-rasm) ikkinchi darajali II sinf guruhi yoki ikki yetakchi Assur guruhi deb ataladi. (Ushbu guruh asosiy mexanizmga miloddan avvalgi ikkita tasma va CD orqali ulangan).
Guruhning tartibi guruh asosiy mexanizmga biriktirilgan elementlarning soni bilan belgilanadi.
Ikkinchidan yuqori bo'lmagan sinflar guruhlarini o'z ichiga olgan mexanizmlar II sinf mexanizmlari deb ataladi.
7-rasm
Guruh II sinfining barcha keyingi turlarini individual aylanish juftlarini translatsiya juftlari bilan almashtirish orqali olish mumkin.
Ikkinchi tur - ekstremal aylanish juftlaridan biri translatsion juftlik bilan almashtirilgan (8-rasm).
Guruch. sakkiz
Uchinchi tur - translatsiya juftligi o'rta aylanish juftligi bilan almashtiriladi (9-rasm).
To'rtinchi ko'rinish - ikkita ekstremal aylanish juftligi ikkita tarjima juftligi bilan almashtiriladi (10-rasm).
10-rasm
Beshinchi tur - translatsiya juftlari ekstremal va o'rta aylanish juftlari bilan almashtiriladi (11-rasm).
11-rasm
Shunday qilib, IV va V sinflarning aylanish, translatsiya va yuqori juftliklari bo'lgan tekis mexanizmlarda II sinfning beshta guruhi mavjud. Texnologiyada qo'llaniladigan zamonaviy mexanizmlarning aksariyati II sinf mexanizmlariga tegishli.
Keling, bog'lanishlar va kinematik juftliklar sonining ikkinchi mumkin bo'lgan kombinatsiyasini ko'rib chiqaylik. Bog'lanishlar soni bo'yicha keyingi guruh to'rtta havola va V sinfning olti juftligini o'z ichiga olishi kerak (12-rasm). Ushbu kombinatsiya uchun uchta turdagi kinematik zanjirlar olinishi mumkin, ularning shakllanishining strukturaviy tamoyillari boshqacha.
Birinchi kinematik zanjir ancha murakkab ochiq kinematik zanjir bo'lib, uchinchi tartibdagi III sinf guruhi bo'lib, uch qo'rg'oshinli guruh deb ataladi.
12-rasm
EFC havolasi asosiy havola hisoblanadi.
Uchinchi darajali III sinf guruhlaridan yuqori bo'lmagan guruhlarni o'z ichiga olgan mexanizmlar III sinf mexanizmlari deb ataladi (13-rasm).
13-rasm
Ikkinchi kinematik zanjir - yopiq kinematik zanjir bo'lib, u asosiy mexanizmning "k" va "m" bo'g'inlariga bog'ichlar elementlari bilan emas, balki asosiy bo'g'inlarga tegishli bo'lgan B va G bo'sh elementlar bilan biriktiriladi (14-rasm). ).
14-rasm
Ushbu guruh, ikkita qattiq yopiq halqa hosil qiluvchi ikkita asosiy birlik BCD va EGF bilan bir qatorda, bitta harakatlanuvchi to'rt tomonlama yopiq pastadir CEFD (15-rasm).
Harakatlanuvchi to'rt tomonlama yopiq sxemalarni o'z ichiga olgan guruhlar IV sinf guruhlari sifatida tasniflanadi.
Kinematik zanjirning uchinchi turi: bu zanjir II sinfning ikkita oddiy guruhiga - BCD va EFG ga bo'linadi va shuning uchun avval ko'rib chiqilganlarga tegishli bo'lib, hech qanday printsipial jihatdan yangi narsani ifodalamaydi (16-rasm).
 Guruch. 1.15 1.16-rasm
Guruch. 1.15 1.16-rasm
Shuning uchun II sinf guruhiga bir tomonlama sxema, III sinf guruhiga uch tomonlama yopiq sxema va IV sinf guruhiga yopiq to'rt tomonlama zanjir kiradi. Barcha ko'rib chiqilgan guruhlar konturlar tuzilishidagi tegishli o'zgarishlar orqali olinadi.
ADABIYOT
Artobolevskiy I.I. Mexanizmlar va mashinalar nazariyasi. M, 1975, 48-90-betlar.
Tikuv mashinasi ishi. Igna va ipni olish mexanizmlarining ish joylarining kinematik sxemasi va traektoriyalarini qurish. Igna va ip olish mexanizmlari bo'g'inlarining tezligi va tezlanishlarini aniqlash, tezlashtirish rejasini tuzish. Mexanizmlarning kuch tahlili.
Strukturaviy tahlil, mexanizmning pozitsiyalarini qurish va ishlash uchun tezlik rejalari va bo'sh harakat, yuqori va pastki ekstremal pozitsiyalar. Tezlashtirish rejalarini qurish, mexanizmni kinetostatik hisoblash. Bog'lanishlarning inersiya kuchlarini va tortishish kuchlarini aniqlash.
Mexanizmni strukturaviy va kinematik o'rganish: sxemaning tavsifi; tezlik rejalarini qurish. Kinematik juftlikdagi reaksiyalarni aniqlash; N.E tomonidan etakchi bo'g'inning kuch hisoblash. Jukovskiy. Tishli va vites mexanizmining sintezi.
Tutqich mexanizmining o'lchamlari va parametrlarini hisoblash. Qisqartirilgan inersiya momentlari, kuchlarning kamaytirilgan momentlari diagrammasini qurish, ish harakatlantiruvchi kuchlar va qarshilik kuchlari, o'zgarishlar kinetik energiya. Yondashuv fazasidagi harakat qonunining xususiyatlari.
Krank-slayder mexanizmining strukturaviy tahlili, uning strukturaviy tarkibini aniqlash. Kinematik sxemaning sintezi. Kinematik tahlil tekis mexanizm. Mexanizmning bo'g'inlariga ta'sir qiluvchi kuchlarni aniqlash. Kuchni tahlil qilishning kinetostatik usuli.
Mashinalar, mexanizmlar, bo'g'inlar va kinematik juftlarning asosiy tushunchalari va ta'rifi. Ossuriya guruhlari. Yassi va fazoviy mexanizmlarning erkinlik darajalari sonini hisoblash, tekis tutqichli mexanizmlar tuzilishini tahlil qilish. Passiv ulanishlar va ortiqcha harakatchanlik.
Krank-muvozanat mexanizmi mexanizmining kinematik diagrammasi. Etakchi bo'g'inning boshlang'ich pozitsiyasi. Kinematik diagrammalar, tezlik va tezlashtirish rejalari. Haydash krankidagi muvozanat momentini aniqlash, Jukovskiy dastagi usuli bilan tekshirish.
O'rnatish mashinasining qurilmasi, ishlash printsipi va maqsadi. Kinematik tahlil va elektr motorini tanlash. Qo'llash nuqtasini va muvozanatlashuvchi kuchning yo'nalishini aniqlash. Kinetik energiya va haqiqiy tezlikni o'zgartirish diagrammasini qurish.
TsD2-35-VM vites qutisining berilgan yopish bo'g'inining qiymatini vazifa tomonidan belgilangan chegaralarda ta'minlovchi o'lchovli zanjirning tarkibiy qismlari uchun tolerantliklarni hisoblash. Usullar bo'yicha hisob-kitoblarni amalga oshirish: maksimal-minimal, ehtimollik va tartibga solish.
Menteşali mexanizmning kinematik sxemasi. Bosqich uzunligini va uzunlikning masshtab koeffitsientini aniqlash. Serif usuli yordamida berilgan krank holati uchun mexanizm pozitsiyasi rejasini qurish. Tezlik rejasini tuzish. Sahna orqasining burchak tezlanishini hisoblash.
Mashina va mexanizmlar haqida asosiy ma'lumotlar. Mashinalarning energiya va ishchi guruhlari. Mexanik uzatma, harakatlantiruvchi va boshqariladigan mil haqida tushunchalar. Tasma va tishli uzatishning tishli nisbati. Yassi kuchlar tizimi. Buralish paytida kuchlanishlarni taqsimlash.
Yassi tutqichli mexanizmning strukturaviy, dinamik va kinetostatik tahlili. Uning bo'g'inlarining burchak tezliklarini aniqlash; tashqi kuchlar va har bir zveno va kinematik juftga ta'sir etuvchi inersiya momentlari. Quvvat mexanizmini loyihalash.
Kinematik juftlik - bu ikkita qo'shni bo'g'inlarning harakatchan aloqasi bo'lib, ular ma'lum bir nisbiy harakatni ta'minlaydi. Kinematik juftlikning elementlari - bu ikki bo'g'inning harakatlanuvchi ulanishi sodir bo'lgan va kinematik juftlikni tashkil etuvchi chiziqlar yoki nuqtalar sirtlari to'plami. Juftlik mavjud boʻlishi uchun uni tashkil etuvchi boʻgʻinlar elementlari doimiy aloqada boʻlishi kerak T.
Ishlaringizni ijtimoiy tarmoqlarda baham ko'ring
Agar ushbu ish sizga mos kelmasa, sahifaning pastki qismida shunga o'xshash ishlar ro'yxati mavjud. Qidiruv tugmasidan ham foydalanishingiz mumkin
2-ma'ruza
Mashinaning mexanizmi qanday bo'lishidan qat'i nazar, u har doim faqat bog'lamlar va kinematik juftliklardan iborat.
Harakatlanuvchi zvenolarga mexanizmlarda, mashinalar va mexanizmlar nazariyasida qo'yilgan ulanish shartlari Kinematik juftlarni chaqirish odatiy holdir.
Kinematik juftlikikkita qoʻshni boʻgʻinning harakatlanuvchi bogʻlanishi, ularni maʼlum bir nisbiy harakat bilan taʼminlovchi deb ataladi.
Jadvalda. 2.1 amalda eng keng tarqalgan kinematik juftlarning nomlari, chizmalari, belgilarini, shuningdek ularning tasnifini ko'rsatadi.
Bog'lanishlar kinematik juftlikka birlashganda, sirtlar, chiziqlar va nuqtalar bo'ylab bir-biriga tegishi mumkin.
Kinematik juftlikning elementlariular bo'ylab ikki bo'g'inning harakatlanuvchi ulanishi sodir bo'ladigan va kinematik juftlikni tashkil etuvchi yuzalar, chiziqlar yoki nuqtalar to'plamini chaqiradilar. Kinematik juftlik elementlarining aloqa turiga qarab, mavjud balandroq va pastroq kinematik juftliklar.
Elementlar tomonidan chiziq yoki nuqta shaklida hosil qilingan kinematik juftliklar deyiladi yuqoriroq.
Elementlar tomonidan sirt shaklida hosil bo'lgan kinematik juftliklar deyiladi pastroq.
Juftlik mavjud bo'lishi uchun uning tarkibiy qismlarining elementlari doimiy aloqada bo'lishi kerak, ya'ni. yopiq bo'lish. Kinematik juftlarning yopilishi bo'lishi mumkingeometrik yoki kuch bilan, Masalan, o'z massasi, buloqlar va boshqalar yordamida.
Kinematik juftlarning mustahkamligi, aşınmaya bardoshliligi va chidamliligi ularning turiga va dizayniga bog'liq. Pastki juftliklar yuqoriroqlarga qaraganda ko'proq aşınmaya bardoshli. Bu pastki juftliklarda juft elementlarning aloqasi sirt bo'ylab sodir bo'lishi bilan izohlanadi va shuning uchun bir xil yuk bilan undagi yuqori bosimga qaraganda pastroq o'ziga xos bosim paydo bo'ladi. Kiyinish, ceteris paribus, o'ziga xos bosimga mutanosibdir va shuning uchun pastki Juftlar yuqoriroqlarga qaraganda sekinroq eskiradi. Shuning uchun, mashinalarda eskirishni kamaytirish uchun, pastki juftlarni ishlatish afzaldir, lekin ko'pincha yuqori kinematik juftliklardan foydalanish mashinalarning strukturaviy diagrammalarini sezilarli darajada soddalashtirishga imkon beradi, bu ularning o'lchamlarini kamaytiradi va dizaynni soddalashtiradi. Shuning uchun kinematik juftlarni to'g'ri tanlash murakkab muhandislik muammosidir.
Kinematik juftliklar ham bo'linadierkinlik darajalari soni(harakatchanlik), u orqali bog'langan havolalar uchun mavjud qiladi, yokiulanish shartlari soni(juftlik sinfi), bog'langan bo'g'inlarning nisbiy harakatiga juft tomonidan yuklangan. Bunday tasnifdan foydalanganda, mashina ishlab chiqaruvchilari ulanishlarning mumkin bo'lgan nisbiy harakatlari va juftlik elementlari orasidagi kuch omillarining o'zaro ta'sirining tabiati haqida ma'lumot oladilar.
Umumiy holatda bo'lgan bepul havola M - o'lchovli bo'shliq, ruxsat berish P eng oddiy harakatlar turlari, bir qator erkinlik darajalariga ega! ( H) yoki W - harakatlanuvchi.
Shunday qilib, agar havola uch o'lchamli bo'shliqda bo'lsa, olti turdagi oddiy harakatlarga imkon beradi - o'qlar atrofida va bo'ylab uchta aylanish va uchta tarjima. X, V, Z , keyin biz oltita erkinlik darajasiga ega yoki oltita umumlashtirilgan koordinataga ega yoki oltita harakatlanuvchi deb aytamiz. Agar havola uch turdagi oddiy harakatlarga imkon beruvchi ikki o'lchovli makonda bo'lsa - atrofida bir aylanish Z va o'qlar bo'ylab ikkita tarjima X va Y , keyin ular uchta erkinlik darajasiga yoki uchta umumlashtirilgan koordinataga ega yoki uchta harakatlanuvchi va hokazo deb aytishadi.
2.1-jadval
Bog'lanishlar kinematik juftliklar yordamida birlashtirilganda, ular erkinlik darajasini yo'qotadilar. Bu shuni anglatadiki, kinematik juftliklar raqam orqali bog'laydigan bog'lanishlarga yuklaydi S.
Kinematik juftlikka birlashtirilgan bog'lanishlar nisbiy harakatga ega bo'lgan erkinlik darajalari soniga qarab, juftlikning harakatchanligini aniqlang ( W = H ). Agar H nisbiy harakatdagi kinematik juftlik bo'g'inlarining erkinlik darajalari soni bo'lsa, uchun juft harakatchanlik quyidagicha aniqlanadi:
qaerda P - ko'rib chiqilayotgan juftlik mavjud bo'lgan makonning harakatchanligi; S - juftlik tomonidan qo'yilgan obligatsiyalar soni.
Shuni ta'kidlash kerakki, juftlikning harakatchanligi V , (2.1) bilan belgilangan, u amalga oshirilgan makon turiga bog'liq emas, balki faqat qurilishga bog'liq.
Masalan, oltita va uchta harakatlanuvchi bo'shliqda aylanma (tarjima) (2.1-jadvalga qarang) juftlik baribir bitta harakatlanuvchi bo'lib qoladi, birinchi holatda unga 5 ta bog'lanish qo'yiladi, ikkinchi holda - 2 ta obligatsiyalar va shuning uchun biz mos ravishda:
oltita harakatlanuvchi joy uchun:
uchta harakatlanuvchi joy uchun:
Ko'rib turganingizdek, kinematik juftlarning harakatchanligi kosmosning xususiyatlariga bog'liq emas, bu esa ushbu tasnifning afzalligi hisoblanadi. Aksincha, kinematik juftlarning sinflarga tez-tez bo'linishi, juftlikning sinfi makonning Xarakteristikasiga bog'liqligidan aziyat chekadi, ya'ni turli fazolardagi bir xil juftlik boshqa sinfga ega. Bu amaliy maqsadlar uchun noqulay, ya'ni kinematik juftlarning bunday tasnifi irratsionaldir, shuning uchun uni ishlatmaslik yaxshiroqdir.
Juftlik elementlarining shunday shaklini tanlash mumkin, shunda bitta mustaqil elementar harakat bilan ikkinchisi - qaram (hosil) paydo bo'ladi. Bunday kinematik juftlikka vintni misol qilib keltirish mumkin (2-jadval. 1) . Bu juftlikda vintning (gaykaning) aylanish harakati uning eksa bo'ylab translatsion harakatiga sabab bo'ladi. Bunday juftlik bitta harakatlanuvchiga tegishli bo'lishi kerak, chunki unda faqat bitta mustaqil oddiy harakat amalga oshiriladi.
Kinematik aloqalar.
Kinematik juftliklar jadvalda keltirilgan. 2.1, oddiy va ixcham. Ular mexanizmlarni yaratish uchun zarur bo'lgan bog'lanishlarning deyarli barcha eng oddiy nisbiy harakatlarini amalga oshiradilar. Biroq, mashinalar va mexanizmlarni yaratishda ular kamdan-kam qo'llaniladi. Buning sababi shundaki, katta ishqalanish kuchlari odatda juftlikni tashkil etuvchi bo'g'inlarning aloqa nuqtalarida paydo bo'ladi. Bu juftlik elementlarining sezilarli darajada aşınmasına va shuning uchun uning yo'q qilinishiga olib keladi. Shuning uchun, kinematik juftlikning eng oddiy ikki bo'g'inli kinematik zanjiri ko'pincha uzunroq kinematik zanjirlar bilan almashtiriladi, ular birgalikda kinematik juftlik almashtirilganda bo'g'inlarning bir xil nisbiy harakatini amalga oshiradilar.
Kinematik juftlikni almashtirish uchun mo'ljallangan kinematik zanjir kinematik ulanish deb ataladi.
Amalda eng keng tarqalgan aylanma, translatsiya, spiral, sferik va tekislikdan tekislik kinematik juftliklari uchun kinematik zanjirlarga misollar keltiramiz.
Jadvaldan. 2.1 dan ko'rinib turibdiki, aylanuvchi kinematik juftlikning eng oddiy analogi aylanma elementlari bo'lgan rulmandir. Xuddi shunday, rolikli qo'llanmalar chiziqli juftlikni almashtiradi va hokazo.
Kinematik ulanishlar ishlashda qulayroq va ishonchli bo'lib, ancha katta kuchlarga (momentlarga) bardosh beradi va mexanizmlarning ulanishlarning yuqori nisbiy tezligida ishlashiga imkon beradi.
Mexanizmlarning asosiy turlari.
Mexanizmni quyidagicha ko'rish mumkin maxsus holat kinematik zanjir, unda kamida bitta bo'g'in rafga aylantiriladi va qolgan bo'g'inlarning harakati kirish bo'g'inlarining belgilangan harakati bilan belgilanadi.
Mexanizmni ifodalovchi kinematik zanjirning o'ziga xos xususiyatlari uning bo'g'inlari harakatining tokchaga nisbatan harakatchanligi va aniqligidir.
Mexanizm bir nechta kirish va bitta chiqish bo'g'iniga ega bo'lishi mumkin, bu holda u yig'ish mexanizmi deb ataladi va aksincha, bitta kirish va bir nechta chiqish bo'g'inlari, keyin u farqlash mexanizmi deb ataladi.
Mexanizmlar bo'linadiqo'llanmalar va uzatish.
uzatish mexanizmikirish va chiqish bo'g'inlarining harakatlari o'rtasidagi berilgan funktsional munosabatni takrorlash uchun mo'ljallangan qurilma deb ataladi.
hidoyat mexanizmiular faqat harakatlanuvchi zvenolar bilan kinematik juftlarni hosil qiluvchi zvenoning ma'lum bir nuqtasining traektoriyasi berilgan egri chiziqqa to'g'ri keladigan mexanizm deb ataladi.
Texnologiyada keng qo'llaniladigan mexanizmlarning asosiy turlarini ko'rib chiqing.
Bog'lanishlari faqat pastki kinematik juftlarni tashkil etuvchi mexanizmlar deyiladibo'g'imli tutqich. Bu mexanizmlar chidamliligi, ishonchliligi va ishlatish uchun qulayligi tufayli keng qo'llaniladi. Bunday Mexanizmlarning asosiy vakili bo'g'inli to'rt bo'g'indir (2.1-rasm).
Mexanizmlarning nomlari, odatda, ularning kirish va chiqish aloqalarining nomlari yoki ularning tarkibiga kiritilgan xarakterli bo'g'inlar bilan belgilanadi.
Kirish va chiqish bo'g'inlarining harakat qonunlariga ko'ra, bu mexanizmni krank-roker, qo'sh krank, qo'sh roker, roker-krank deb atash mumkin.
Bog'langan to'rt bo'g'in mashinasozlikda, asbobsozlikda, shuningdek, qishloq xo'jaligi, oziq-ovqat, qor tozalash va boshqa mashinalarda qo'llaniladi.

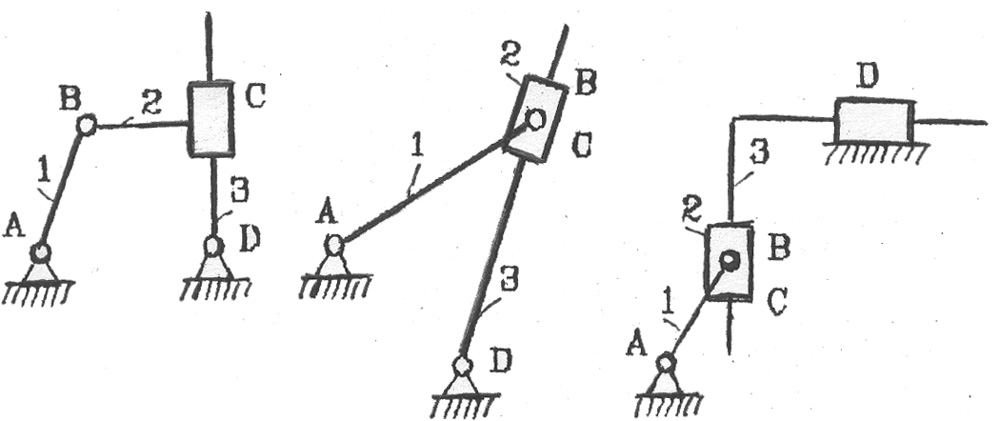
Agar aylanma juftlikni menteşeli to'rt bog'ichga almashtirsak, masalan D , tarjima qilish uchun, keyin biz taniqli krank-slayder mexanizmini olamiz (2.2-rasm).
Guruch. 2.2. Krank-slayder mexanizmlarining har xil turlari:
1 krank 2 - birlashtiruvchi novda; 3 - slayder
Krank-slayder (slayder-krank) mexanizmi kompressorlarda, nasoslarda, dvigatellarda keng qo'llaniladi. ichki yonish va boshqa mashinalar.
Menteşeli to'rt bog'ichda aylanma juftlikni almashtirish FROM translatsiyaga, biz roker mexanizmini olamiz (2.3-rasm).
p va c da .2.3, roker mexanizmida aylanma juftlarni almashtirish orqali menteşeli to'rt bo'g'indan olinadi. Qila olmoq progressiv uchun.
Roker mexanizmlari ishlash va bo'sh harakatlanishning assimetriyasining o'ziga xos xususiyati tufayli planya mashinalarida keng qo'llanilishini topdi. Odatda ular to'sarning asl holatiga qaytishini ta'minlaydigan uzoq ish zarbasi va tez bo'sh zarbaga ega.
Guruch. 2.3. Har xil turdagi roker mexanizmlari:
1 krank; 2 tosh; 3 qanot.
Menteşali dastagi mexanizmlari robototexnikada katta qo'llanilgan (2.4-rasm).
Ushbu mexanizmlarning o'ziga xosligi shundaki, ular mavjud katta raqam erkinlik darajalari, ya'ni ular ko'p disklarga ega. Kirish bo'g'inlari drayvlarining muvofiqlashtirilgan ishlashi tutqichning oqilona traektoriya bo'ylab va atrofdagi makonda ma'lum bir joyga harakatlanishini ta'minlaydi.
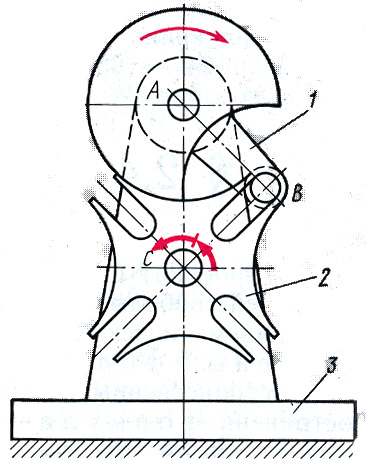
Muhandislik sohasida keng qo'llanilishikamera mexanizmlari. Kamera mexanizmlari yordamida bu qonunga muvofiq boshqariladigan bo'g'inning deyarli har qanday harakatini tizimli ravishda olishning eng oson usuli,
Hozirda mavjud katta raqam kamera mexanizmlarining navlari, ularning ba'zilari rasmda ko'rsatilgan. 2.5.

Kirish bo'g'iniga (kamera) tegishli shakl berish orqali kamera mexanizmining chiqish bo'g'inining zaruriy harakat qonuniga erishiladi. Kamera aylanishni amalga oshirishi mumkin (2.5-rasm, a, b ), tarjima (2.5-rasm, c, g ) yoki murakkab harakat. Chiqish rishtasi, agar u tarjima harakatini qilsa (2.5-rasm, a, in ), itaruvchi deb ataladi va agar silkitsa (2.5-rasm, G ) - roker. Yuqori kinematik juftlikda ishqalanish yo'qotishlarini kamaytirish uchun DA qo'shimcha bog'lovchi rolikdan foydalaning (2.5-rasm, G).
Shisha mexanizmlar ham ishlaydigan mashinalarda, ham har xil turdagi buyruq qurilmalarida qo'llaniladi.
Ko'pincha, metall kesish dastgohlarida, presslarda, turli xil asboblar va o'lchash asboblarida vintli mexanizmlar qo'llaniladi, ularning eng oddiylari rasmda ko'rsatilgan. 2.6:
Guruch. 2.6 Vida mexanizmi:
1 - vint; 2 - yong'oq; A, B, C - kinematik juftliklar
Vintli mexanizmlar, odatda, aylanish harakatini o'zaro bog'liq bo'lgan tarjima harakatiga yoki aksincha aylantirish zarur bo'lganda qo'llaniladi. Harakatlarning o'zaro bog'liqligi vintlar juftligining geometrik parametrlarini to'g'ri tanlash bilan o'rnatiladi DA .
Takoz mexanizmlari (2.7-rasm) da qo'llaniladi turli xil cheklangan kirish kuchlari bilan katta chiqish quvvatini yaratish talab qilinadigan siqish moslamalari va moslamalari. Ushbu mexanizmlarning o'ziga xos xususiyati dizaynning soddaligi va ishonchliligidir.
Ishqalanish kuchlari hisobiga aloqa qiluvchi jismlar orasidagi harakatning uzatilishi amalga oshiriladigan mexanizmlar ishqalanish deyiladi. Eng oddiy uch bo'g'inli ishqalanish mexanizmlari rasmda ko'rsatilgan. 2.8

Guruch. 2.7 Takoz mexanizmi:
1, 2 - havolalar; L, V, C - kinematik bayramlar.

Guruch. 2.8 Ishqalanish mexanizmlari:
a - parallel o'qlar bilan ishqalanish mexanizmi; b - kesishgan o'qlar bilan ishqalanish mexanizmi; ichida - raf va pinion ishqalanish mexanizmi; 1 - kirish roligi (g'ildirak);
2 chiqish roligi (g'ildirak); 2" - temir yo'l
Havolalar mavjudligi sababli 1 va 2 bir-biriga bog'langan holda, ular orasidagi aloqa chizig'i bo'ylab ishqalanish kuchi paydo bo'lib, u bilan birga boshqariladigan aloqani tortadi. 2 .
Ishqalanish mexanizmlari qurilmalarda, lenta uzatgichlarda, variatorlarda (tezlikni silliq nazorat qiluvchi mexanizmlarda) keng qo'llaniladi.
O'tkazish uchun aylanish harakati ma'lum bir qonunga ko'ra, parallel, kesishgan va kesishgan o'qlari bo'lgan vallar o'rtasida har xil turdagi tishli uzatmalar qo'llaniladi. mexanizmlar . Tishli mexanizmlar yordamida ikkala vallar orasidagi harakatni uzatish mumkinqattiq akslar, shuning uchun bilan kosmosda harakatlanish.
Tishli mexanizmlar chiqish bo'g'inining aylanish chastotasi va yo'nalishini o'zgartirish, harakatlarni yig'ish yoki ajratish uchun ishlatiladi.

Shaklda. 2.9 da qo'zg'almas o'qlari bo'lgan viteslarning asosiy vakillari ko'rsatilgan.
2.9-rasm. Ruxsat etilgan o'qli tishli uzatmalar:
a - silindrsimon; b - konusning shakli; oxirida; g - raf;
1 - tishli; 2 - vites; 2 * temir yo'l
Ikki to'rli vitesning kichikrog'i deyiladi jihozlar va boshqalar - tishli g'ildirak.
Rak - bu egrilik radiusi cheksizlikka teng bo'lgan tishli g'ildirakning maxsus holati.

Agar tishli poezdda harakatlanuvchi o'qlari bo'lgan viteslar bo'lsa, ular sayyora deb ataladi (2.10-rasm):
Biroq, sayyora uzatmalar, sobit o'qlari bo'lgan viteslar bilan solishtirganda, kichikroq viteslar bilan katta quvvat va tishli nisbatlarini uzatish imkonini beradi. Ular jamlovchi va differensial mexanizmlarni yaratishda ham keng foydalaniladi.
Kesishuvchi o'qlar orasidagi harakatlarning uzatilishi chuvalchangli uzatma yordamida amalga oshiriladi (2.11-rasm).

Vint-gayka uzatmasidan chuvalchangli uzatma gaykani uzunlamasına kesib, o'zaro perpendikulyar tekisliklarda ikki marta buklash orqali olinadi. Chuvalchangli uzatmalar o'z-o'zidan tormozlanish xususiyatiga ega va bir bosqichda katta vites nisbatlarini amalga oshirishga imkon beradi.
Guruch. 2.11. Chuvalchangli mexanizm:
1 - qurt, 2 - qurt g'ildiragi.
Intervalgacha harakatlanuvchi mexanizmlar, shuningdek, Malta xoch mexanizmini ham o'z ichiga oladi. Shaklda. Z-L "2. to'rt pichoqli "Malta xochi" mexanizmini ko'rsatadi.
"Malta xochi" mexanizmi etakchi tekis - 1-krankning doimiy aylanishini chiroq bilan aylantiradi. 3 "xoch" ning intervalgacha aylanishiga 2, chiroq 3 zarbasiz "xoch" ning radial yiviga kiradi 2 va uni burchakka buradi z - oluklar soni.
Harakatni faqat bitta yo'nalishda amalga oshirish uchun ratchet mexanizmlari qo'llaniladi. 2.13-rasmda tirgak mexanizmi ko'rsatilgan bo'lib, u qo'ltiq 1, g'ildirak 3 va panjalar 3 va 4 dan iborat.

Rokerni silkitganda 1 silkituvchi it 3 mandal g'ildiragiga aylanishni beradi 2 faqat rocker qo'lini soat sohasi farqli ravishda harakatlantirganda. G'ildirakni ushlab turish uchun 2 roker soatga qarshi harakat qilganda o'z-o'zidan soat yo'nalishi bo'yicha aylanishdan qulflash panjasi ishlatiladi 4 .
Malta va ratchet mexanizmlari dastgohlar va asboblarda keng qo'llaniladi,
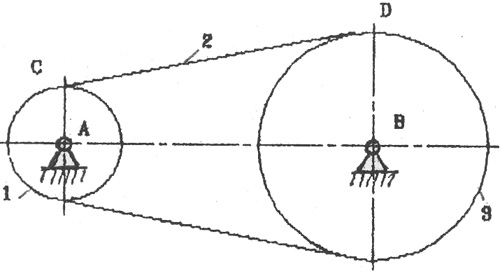
Nisbatan o'tkazish kerak bo'lsa uzoq masofa mexanik energiya kosmosning bir nuqtasidan ikkinchisiga, keyin moslashuvchan bog'lanishli mexanizmlar qo'llaniladi.
Kamarlar, arqonlar, zanjirlar, iplar, lentalar, to'plar va boshqalar harakatni bir tekisdan ikkinchisiga o'tkazadigan moslashuvchan bog'lanish sifatida ishlatiladi;
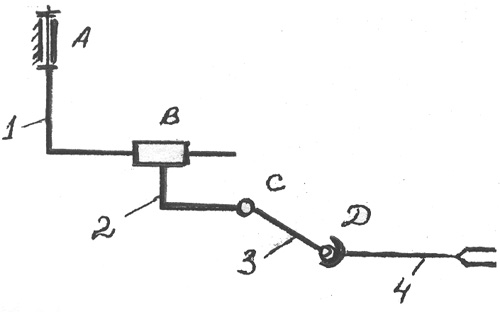
Shaklda. 2.14 moslashuvchan aloqa bilan eng oddiy mexanizmning blok diagrammasini ko'rsatadi.
Moslashuvchan bo'g'inli tishli uzatmalar mashinasozlik, asbobsozlik va boshqa sohalarda keng qo'llaniladi.
Eng tipik oddiy mexanizmlar yuqorida ko'rib chiqilgan. mexanizmlar, shuningdek, maxsus Adabiyotlarda, pa-sertifikatlarda va ma'lumotnomalarda, masalan, kabilar berilgan.
Mexanizmlarning strukturaviy formulalari.
Erkinlik darajalari soni bilan bog'liq bo'lgan turli mexanizmlarning tuzilishida (tuzilmasida) umumiy qonuniyatlar mavjud. V bog'lanishlar soni va uning kinematik juftlarining soni va turi bilan mexanizm. Bu naqshlar mexanizmlarning strukturaviy formulalari deb ataladi.
Fazoviy mexanizmlar uchun hozirgi vaqtda Malyshev formulasi eng keng tarqalgan bo'lib, uning kelib chiqishi quyidagicha.
bilan mexanizmga ruxsat bering m rishtalar (shu jumladan, raf), - bir, ikki, uch, to'rt va beshta harakatlanuvchi juftliklar soni. Keling, harakatlanuvchi havolalar sonini belgilaylik. Agar barcha harakatlanuvchi havolalar bo'lsa erkin jismlar, umumiy soni erkinlik darajasi 6 bo'ladi n . Biroq, har bir bitta harakatlanuvchi juftlik V sinf juftlikni tashkil etuvchi zvenolarning nisbiy harakatiga 5 ta bog'lanishni, har ikki harakatlanuvchi juftlikni yuklaydi. IV sinf - 4 obligatsiyalar va boshqalar. Shuning uchun oltiga teng erkinlik darajalarining umumiy soni miqdorga kamayadi.
kinematik juftlikning harakatchanligi qayerda, harakatchanligi teng bo'lgan juftliklar soni i . Ustlangan ulanishlarning umumiy soni ma'lum bir sonni o'z ichiga olishi mumkin q mexanizmning harakatchanligini kamaytirmasdan boshqa ulanishlarni takrorlaydigan, lekin uni faqat statik jihatdan noaniq tizimga aylantiradigan ortiqcha (takroriy) ulanishlar. Shuning uchun fazoviy mexanizmning erkinlik darajalari soni, uning harakatlanuvchi kinematik zanjirining tokchaga nisbatan erkinlik darajalari soniga teng, quyidagi Malyshev formulasi bilan aniqlanadi:
yoki qisqacha
(2.2)
mexanizm uchun statik aniqlanuvchi tizim, uchun - statik aniqlanmagan tizim.
Umumiy holatda (2.2) tenglamaning yechimi noma'lum bo'lgani uchun qiyin masala W va q ; mavjud echimlar murakkab va bu ma'ruzada ko'rib chiqilmaydi. Biroq, muayyan holatda, agar V , geometrik mulohazalardan topilgan mexanizmning umumlashtirilgan koordinatalari soniga teng, bu formuladan ortiqcha ulanishlar sonini topishingiz mumkin (Qarang: Reshetov L. N. Ratsional mexanizmlarni loyihalash. M.., 1972)
(2.3)
va mexanizmning statik aniqlanishi masalasini hal qilish; yoki mexanizm statik jihatdan aniqlanganligini bilib, toping (yoki tekshiring) V.
Shuni ta'kidlash kerakki, strukturaviy formulalar bo'g'inlarning o'lchamlarini o'z ichiga olmaydi, shuning uchun mexanizmlarni tizimli tahlil qilishda ularni har qanday (ma'lum chegaralar ichida) deb hisoblash mumkin. Agar ortiqcha ulanishlar bo'lmasa (), mexanizmni yig'ish havolalarni deformatsiya qilmasdan sodir bo'ladi, ikkinchisi o'z-o'zidan sozlanganga o'xshaydi; shuning uchun bunday mexanizmlar o'z-o'zini tekislash deb ataladi. Agar ortiqcha ulanishlar mavjud bo'lsa (), unda mexanizmni yig'ish va uning bo'g'inlarini harakatlantirish faqat ikkinchisi deformatsiyalanganda mumkin bo'ladi.
Ortiqcha havolalarsiz tekis mexanizmlar uchun strukturaviy formula P. L. Chebyshev nomi bilan atalgan, u birinchi marta 1869 yilda aylanish juftlari va bir darajadagi erkinlik bilan tutqichli mexanizmlar uchun taklif qilgan. Hozirgi vaqtda Chebishev formulasi har qanday tekis mexanizmlar uchun kengaytirilgan va quyidagi ortiqcha cheklovlarni hisobga olgan holda olingan.
m bog'lamli tekis mexanizmga ruxsat bering (shu jumladan tokcha), - harakatlanuvchi bo'g'inlar soni, - pastki juftliklar soni va - yuqori juftliklar soni. Agar barcha harakatlanuvchi zvenolar tekis harakatlanuvchi erkin jismlar bo'lsa, umumiy erkinlik darajalari soni 3 ga teng bo'lar edi. n . Biroq, har bir pastki juft juftlikni tashkil etuvchi zvenolarning nisbiy harakatiga ikkita bog'lanishni o'rnatadi va bunda bir daraja erkinlik qoladi va har bir yuqori juftlik bittadan bog'lanishni o'rnatadi va 2 daraja erkinlik qoldiradi.
Ustlangan bog'lanishlar soni ma'lum miqdordagi ortiqcha (takroriy) bog'lanishlarni o'z ichiga olishi mumkin, ularning yo'q qilinishi mexanizmning harakatchanligini oshirmaydi. Binobarin, tekis mexanizmning erkinlik darajalari soni, ya'ni uning harakatlanuvchi kinematik zanjirining tokchaga nisbatan erkinlik darajalari soni quyidagi Chebishev formulasi bilan aniqlanadi:
(2.4)
Agar ma'lum bo'lsa, bu yerdan ortiqcha ulanishlar sonini topishingiz mumkin
(2.5)
"p" indeksi haqiqatga ishora qiladi gaplashamiz ideal tekis mexanizm haqida, aniqrog'i, uning tekis sxemasi haqida, chunki ishlab chiqarishdagi noaniqliklar tufayli tekis mexanizm ma'lum darajada fazoviydir.
Formulalar (2.2)-(2.5) bo'yicha mavjud mexanizmlarning strukturaviy tahlili va yangi mexanizmlarning strukturaviy diagrammalarining sintezi amalga oshiriladi.
Mexanizmlarning strukturaviy tahlili va sintezi.
Ortiqcha ulanishlarning mashinalarning ishlashi va ishonchliligiga ta'siri.
Yuqorida aytib o'tilganidek, havolalarning o'zboshimchalik bilan (ma'lum chegaralar ichida) o'lchamlari bilan ortiqcha havolalar () bo'lgan mexanizmni ulanishlarni deformatsiya qilmasdan yig'ib bo'lmaydi. Shuning uchun bunday mexanizmlar ishlab chiqarishning aniqligini oshirishni talab qiladi, aks holda yig'ish jarayonida mexanizmning bo'g'inlari deformatsiyalanadi, bu esa kinematik juftliklar va bog'lanishlarning sezilarli qo'shimcha kuchlar bilan yuklanishiga olib keladi (mexanizm bo'lgan asosiy tashqi kuchlardan tashqari) uzatish uchun mo'ljallangan). Haddan tashqari bo'g'inlarga ega mexanizmni ishlab chiqarishda aniqlik etarli bo'lmaganda, kinematik juftliklarda ishqalanish sezilarli darajada oshishi va bo'g'inlarning tiqilib qolishiga olib kelishi mumkin, shuning uchun bu nuqtai nazardan mexanizmlardagi ortiqcha bog'lanishlar istalmagan.
Mexanizmning kinematik zanjirlaridagi ortiqcha ulanishlarga kelsak, mashinalarni loyihalashda ularni to'liq yo'q qilish dizaynning murakkabligi yoki boshqa sabablarga ko'ra foydasiz bo'lib chiqsa, ularni yo'q qilish yoki minimal miqdorda qoldirish kerak. Umumiy holda, kerakli texnologik asbob-uskunalarning mavjudligi, ishlab chiqarish narxi, talab qilinadigan xizmat muddati va mashinaning ishonchliligini hisobga olgan holda optimal echim izlash kerak. Shuning uchun, bu har bir aniq holat uchun juda qiyin vazifadir.
Biz misollar yordamida mexanizmlarning kinematik zanjirlarida ortiqcha bog'lanishlarni aniqlash va yo'q qilish metodologiyasini ko'rib chiqamiz.
To'rtta bir harakatlanuvchi aylanish juftlari bo'lgan tekis to'rt bo'g'inli mexanizm bo'lsin (2.15-rasm, a ) ishlab chiqarishdagi noaniqliklar (masalan, o'qlarning parallel bo'lmaganligi sababli) A va D ) fazoviy bo'lib chiqdi. Kinematik zanjirlarni yig'ish 4, 3, 2 va alohida 4, 1 qiyinchiliklarga olib kelmaydi, balki ball beradi B, B o'qiga joylashtirilishi mumkin X . Biroq, aylanish juftligini yig'ish uchun DA , havolalar orqali hosil qilingan 1 va 2 , u faqat koordinata tizimlarini birlashtirish orqali mumkin bo'ladi Bxyz va B x y z , bu nuqtaning chiziqli siljishini (deformatsiyasini) talab qiladi B bo'g'in 2 x o'qi bo'ylab va zvenoning burchak deformatsiyalari 2 x va z o'qlari atrofida (strelkalar bilan ko'rsatilgan). Bu mexanizmda uchta ortiqcha bog'lanish mavjudligini bildiradi, bu (2.3) formula bilan ham tasdiqlanadi: . Ushbu fazoviy mexanizm statik jihatdan aniqlanishi uchun uning boshqa strukturaviy sxemasi kerak, masalan, rasmda ko'rsatilgan. 2.15, b , Bu erda bunday mexanizmni yig'ish nuqtalarni tekislashdan boshlab, mahkamlashsiz amalga oshiriladi B va B nuqtani siljitish orqali mumkin bo'ladi FROM silindrsimon juftlikda.
Mexanizmning bir varianti mumkin (2.15-rasm, ichida ) ikkita sharsimon juftlik bilan (); Bu holda, bundan tashqariasosiy harakatchanlikmexanizmi paydo bo'ladimahalliy harakatchanlik- birlashtiruvchi novdani aylantirish qobiliyati 2 o'z o'qi atrofida quyosh ; bu harakatchanlik mexanizm harakatining asosiy qonuniga ta'sir qilmaydi va hatto ilgaklarning eskirishini tekislash nuqtai nazaridan foydali bo'lishi mumkin: birlashtiruvchi novda 2 mexanizmning ishlashi vaqtida dinamik yuklar tufayli o'z o'qi atrofida aylanishi mumkin. Malyshev formulasi bunday mexanizm statik jihatdan aniqlanishini tasdiqlaydi:

Guruch. 2.15
Eng oddiy va samarali usul qurilmalar mexanizmlarida ortiqcha ulanishlarni yo'q qilish - ikkita pastki juftlik o'rniga nuqta aloqasi bilan yuqori juftlikni qo'llash; Bu holda tekis mexanizmning harakatchanlik darajasi o'zgarmaydi, chunki Chebishev formulasiga ko'ra (at):
Shaklda. 2.16, a, b, c asta-sekin harakatlanuvchi rolikli itarish vositasi bilan shisha mexanizmidagi ortiqcha bo'g'inlarni yo'q qilish misoli keltirilgan. Mexanizm (2.16-rasm, a ) - to'rt bo'g'inli (); asosiy harakatchanlikdan tashqari (kameraning aylanishi 1
) mahalliy harakatchanlik mavjud (dumaloq silindrsimon rulonning mustaqil aylanishi 3
o'z o'qi atrofida) Natijada, . Yassi sxemada ortiqcha ulanishlar yo'q (mexanizm aralashmasdan yig'iladi). Agar ishlab chiqarishdagi noaniqliklar tufayli mexanizm fazoviy deb hisoblansa, u holda rulonning chiziqli aloqasi bilan 3 kamera 1 bilan da Malyshev formulasiga ko'ra, biz olamiz, lekin ma'lum bir shartda. Kinematik juft silindr - silindr (2.16-rasm, 6
) bog'lanishlarning nisbiy aylanishi mumkin bo'lmaganda z o'qi atrofida 1 , 3 uch tomonlama juftlik bo'ladi. Agar ishlab chiqarishdagi noaniqliklar tufayli bunday aylanish sodir bo'lsa, lekin kichik bo'lsa va chiziqli aloqa amalda saqlanib qolsa (yuklash ostida, kontaktli yamoq shakli to'rtburchakga yaqin bo'lsa), unda bu 
kinematik juftlik to'rtta harakatlanuvchi bo'ladi, shuning uchun va
2.17-rasm
Barrel shaklidagi rolik yordamida eng yuqori juftlik sinfini kamaytirish (nuqta aloqasi bilan beshta harakatlanuvchi juftlik, 2.16-rasm, ichida ), uchun va - mexanizmi statik jihatdan aniqlanganligini olamiz. Biroq, shuni esda tutish kerakki, ulanishlarning chiziqli aloqasi, garchi u ishlab chiqarishning yuqori aniqligini talab qilsa-da, nuqta kontaktiga qaraganda ko'proq yuklarni o'tkazishga imkon beradi.
2.16-rasmda d, e to'rt bo'g'inli uzatmadagi ortiqcha ulanishlarni yo'q qilishga yana bir misol (, g'ildiraklar tishlarining aloqasi) 1, 2 va 2, 3 - chiziqli). Bunday holda, Chebyshev formulasiga ko'ra, - tekis sxemada ortiqcha ulanishlar yo'q; Malyshev formulasiga ko'ra, mexanizm statik jihatdan noaniq, shuning uchun yuqori ishlab chiqarish aniqligi, xususan, barcha uchta g'ildirakning geometrik o'qlarining parallelligini ta'minlash uchun talab qilinadi.
Bo'sh tishlarni almashtirish 2 barrel shaklida (2.16-rasm, d ), biz statik aniqlanuvchi mexanizmni olamiz.





