Harakatchanlik darajasini aniqlash. Mexanizmlarning strukturaviy tahlili va sintezi. II sinf Assur guruhlari turlari
2 Strukturaviy tahlil va mexanizmlarning sintezi
2.1 Kinematik zanjirning erkinlik darajalari sonini aniqlash
Yuqorida ta'kidlanganidek, kinematik zanjirni mexanizmga aylantirish uchun kirish bo'g'inlari soni ushbu kinematik zanjirning erkinlik darajalari soniga teng bo'lishi kerak.
Bu holda kinematik zanjirning erkinlik darajalari soni tokchaga nisbatan harakatlanuvchi bo'g'inlarning erkinlik darajalari sonini bildiradi (bog'lanish qat'iy belgilangan). Biroq, haqiqiy kosmosdagi rafning o'zi harakatlanishi mumkin.
Ekvivalent Aloqa Mobilligi Vakolatli Vakolatli Taqiqlangan Vakolatli Vakolatli Vakolatli. Koptok birikmasi va toymasin qo'shma birikmaning bir qator birikmasi. Eslatmalar: Seriyali ulanishning afzalligi nozik aloqa nuqtasini yoki chiziq turini texnologik jihatdan qiziqarliroq aloqa yuzasi bilan almashtirishdir, chunki ular bosimni pasaytiradi va shu bilan ulanish ishonchliligini oshiradi. Biroq, har bir elementar bo'g'in tomonidan harakatchanlikka ruxsat berilsa, ketma-ket ulanish tarkibidagi qismning ichki harakatchanligi paydo bo'ladi.
Masalan, Yerdagi har qanday harakatsiz jism nol erkinlik darajasiga ega, lekin Jahon fazosida u Yer bilan birgalikda barcha olti erkinlik darajasidan foydalangan holda harakat qiladi. Yana bir misol: kinematik zanjir tagida yotgan pistonli dvigatel, tokchaga nisbatan bir daraja erkinlikka ega (tadqiqotda krank karteriga biriktirilgan silindrdan va avtomobil, mototsikl yoki boshqa mashinaning ramkasi yoki tanasidan iborat bo'lgan bog'lanish), garchi rafning o'zi mashina harakatlanayotganda ham harakat qiladi.
Bu boshqa qismlarning harakatiga olib kelmasdan aylanish yoki tarjima bo'lishi mumkin. Qidiruv va ulanish uchun parallel havolalarda oldingi misoldan foydalanish. Shunday qilib, ketma-ket ulanishdan farqli o'laroq, bir-biriga parallel joylashgan bir nechta elementar zvenolarni o'z ichiga olgan ulanish ikki qism o'rtasidagi harakatchanlik miqdorini kamaytiradi. Ushbu harakatchanlik darajalarini bostirish mexanik harakatlarni ikkita kuchli o'rtasida o'tkazish orqali amalga oshiriladi, chunki uzatiladigan torsorning ma'lum tarkibiy qismlari mavjud, chunki: - eksa bo'ylab translatsiyada bu harakatlanish taqiqlanadi. -asosiy summa komponenti komponentining nolga teng qiymati. - Harakatlanish taqiqlangan eksa atrofida aylanish bu o'q bo'ylab asosiy elementning vaqt komponentining nolga teng bo'lmagan qiymatidan kelib chiqadi.
Biroq, mashina harakatlanyaptimi yoki yo'qligidan qat'i nazar, pistonli dvigatel bo'g'inlarining rafga nisbatan harakatining tabiati o'zgarishsiz qoladi.
Keling, quyidagi belgini kiritamiz:
k - kinematik zanjirning bo'g'inlari soni
p 1 - berilgan zanjirdagi birinchi sinfning kinematik juftlari soni
p 2 - ikkinchi sinfning juftlari soni
p 3 - uchinchi sinfning juftlari soni
Agar bog'langan uzatilgan torsorning noma'lumlari soni teng bo'lsa, bog'lanish izostatik hisoblanadi. Agar uzatilgan kalitning noma'lumlari soni oshib ketgan bo'lsa, havola noaniq hisoblanadi. Asosiy printsip tomonidan taqdim etilgan tenglamalar soni. Amaliy muhandislik darajasi 11.
U aylanishga parallel ravishda elementar havolalardan foydalangan holda quyida ikkita variantni taklif qiladi. Bog'lanish o'qning halqali chiziqli aloqasi, bog'lanish - aylanish o'qining o'qi. Chiziqning statik burilishini belgilaydi. Bog'lanish giperstatizmi darajasini aniqlang. Kinematik tadqiqotda parallel va ikkita zvenoga ekvivalent torsorni aniqlang. va giperstatik noma'lumlar. ikki bog'lanishga ekvivalent kinematik bog'lanish va. shunday qilib, ikkita havolaga ekvivalent bo'lgan va izostatik aylanma aloqa bo'lgan ulanish bir nechta mumkin bo'lgan havolani o'zgartirishni taklif qiladi va havola o'zgarishsiz qoladi.
p 4 - to'rtinchi sinfning juftlari soni
p 5 - beshinchi sinfning juftlari soni.
Fazoda joylashtirilgan erkin zvenolarning k erkinlik darajalarining umumiy soni 6k ga teng. Kinematik zanjirda ular kinematik juftlarga bog'lanadi (ya'ni, ulanishlar ularning nisbiy harakati ustiga qo'yilgan).
Bundan tashqari, mexanizm sifatida rafli kinematik zanjir (qattiq bog'lanish) ishlatiladi. Shuning uchun kinematik zanjirning erkinlik darajalari soni teng bo'ladi umumiy soni Barcha bo'g'inlarning erkinlik darajalari, ularning nisbiy harakatiga qo'yilgan cheklovlarni hisobga olmaganda:
Statik aloqalar torso va ega. Ulanish diagrammasi shunday ko'rinadi. Statik moment: Statikning asosiy printsipiga ko'ra, u buni ko'rsatadi. Kinematik deformatsiya: kinematik torrlar tarkibi qonunidan foydalanib, biz olamiz.
Harakat va barcha aloqalar o'rtasida mavjud. Giperstatizm va harakatchanlik: yozma munosabatlar. Ekvivalent bog'lanishga bog'liq bo'lmagan kinematik noma'lumlar soniga teng. Bir qism mexanizmning boshqa qismlarining harakatiga olib kelmaydigan harakatga ega bo'lishi mumkin bo'lsa, mexanizmda ichki harakatchanlikka ega. Demak, ekvivalent munosabat.
W=6k– ∑ S i
I sinfning barcha juftlari tomonidan o'rnatilgan obligatsiyalar soni ularning soniga teng, chunki birinchi sinfning har bir juftligi bunday juftlikda bog'langan bo'g'inlarning nisbiy harakatiga bitta aloqani yuklaydi; II sinfning barcha juftlari tomonidan o'rnatilgan obligatsiyalar soni ularning ikki barobar soniga teng (ikkinchi sinfning har bir jufti ikkitadan bog'lanishni o'rnatadi) va hokazo.
b = a2 b = b2 g = g1 g 2 ekvivalentlari. E'tibor bering, bu ishlab chiqarish qulayligi qisman yanada murakkab mexanizm bilan qoplanadi. Murakkablik, odatda, erkinlik darajalari sonini oshirish uchun oraliq komponentlarni bog'lanishlarda ketma-ket kiritish bilan bog'liq. Birlashtiriladigan sirtlarning aloqada bo'lishini ta'minlash. Shuning uchun, har bir bo'g'inning vinti nazariyasi haqida aniq bilim, bu baholash imkonini beradi.
Izostatik dizayn boshqalarga nisbatan qismning aniq holatini o'rnatishga rahbarlik qiladi. aloqa yuzalar orasidagi to'g'ri bosim. Misol: izostatik joylashishni aniqlash Kelvin Bu holatda, masalan, minoralarni aylantirish, qismlar orasidagi izostatik va to'liq ulanish uchun ishlatiladi va quyidagi uchta ulanishning parallel kombinatsiyasi yordamida amalga oshiriladi:: ulanish nuqtasi.: Halqali chiziqli ulanish, uning o'qi markazdan o'tadi.
Barcha oltita erkinlik darajasi bo'g'indan olinadi, mahkamlangan holda olinadi (oltita bog'ich rafga o'rnatiladi). Shunday qilib:
S 1 \u003d p 1, S 2 \u003d 2p 2, S 3 \u003d 3p 3, S 4 \u003d 4p 4, S 5 \u003d 5p 5, S raf \u003d 6,
va barcha ulanishlar yig'indisi
∑ S i =p 1 +2p 2 +3p 3 +4p 4 +5p 5 +6.
Natijada fazoviy kinematik zanjirning erkinlik darajalari sonini aniqlash uchun quyidagi formula mavjud:
Dairesel chiziqli ulanishning o'qi va ulanish nuqtasining aloqa nuqtasi bilan hosil bo'lgan tekislik. Biroq, noaniq mexanizm ko'pincha izostatik mexanizmga qaraganda qattiqroq bo'ladi, bu ham qismning boshqasiga nisbatan pozitsion aniqligi omilidir. Ham joylashishni aniqlash, ham xona aloqasini ta'minlaydiganlar.
Uning qo'llab-quvvatlashlari ikki toifaga bo'linadi. Parallel tadqiqotda munosabatlar bilan ko'rsatilgan, ishlov beriladigan qism va ishlov berish birligi o'rtasidagi shu tarzda olingan ekvivalent munosabat izostatik va to'liqdir. Vintlar bilan ta'minlangan aloqani saqlashni o'rganing.
W=6k–p 1 –2p 2 –3p 3 –4p 4 –5p 5 –6.
Tenglamaning birinchi va oxirgi shartlarini guruhlab, biz quyidagilarni olamiz:
W=6(k–1)–p 1 –2p 2 –3p 3 –4p 4 –5p 5 ,
yoki nihoyat:
W=6n–p 1 –2p 2 –3p 3 –4p 4 –5p 5 ,
bu erda n - kinematik zanjirning harakatlanuvchi bo'g'inlari soni.
Bu tenglama deyiladi strukturaviy formula umumiy kinematik zanjir.
Formula birinchi marta (bir oz boshqacha shaklda) P.I. Somov 1887 yilda ishlab chiqilgan va A.P. Malyshev 1923. Shuning uchun ko'pincha Somov-Malyshev formulasi deb ataladi. Ba'zi darsliklarda u Malyshev formulasi deb ataladi - yakuniy versiya muallifligidan keyin.
Spiral mexanik ta'sirga ta'sir qilsin, ma'lum statik noma'lum murojaatlarni aniqlash mumkin. Ish qismini ishlov berish blokiga vint orqali ulash quyidagi ikkita ketma-ket bog'lanishni o'z ichiga oladi: nuqta ulanish o'qi, mashinasozlikda qo'llaniladigan litsenziyalar 20. Ushbu ikkita ketma-ket kanallarni ulashning vint ekvivalenti nazariyasini aniqlang. Shuning uchun, yig'ish va ishlov beriladigan qismning ushlab turadigan aloqa moslamasi o'rtasidagi ekvivalent aloqa bo'shashmasdan aloqa hisoblanadi.
Ushbu kontaktni ushlab turish qurilmasi allaqachon kiritilgan qism joylashishni aniqlash havolalariga hech qanday statik noma'lumlarni qo'shmaydi. Shuning uchun, qismlarni yig'ish birikmalari bilan ekvivalent munosabatlar har doim izostatikdir. Umuman olganda, ikkalasi o'rtasidagi ekvivalent munosabatlar qattiq moddalar qattiq zarrachalarning nisbiy joylashishini ta'minlamaydigan kontakt ushlagichi bo'shashgan birikma bo'lishi kerak. Bunday munosabat ikkitaning nisbiy joylashuvi munosabatlari natijasida olingan giperstatizm darajasini oshirmaslikka imkon beradi qattiq moddalar.
p 1 - bitta harakatlanuvchi juftliklar soni (ya'ni nisbiy harakatda bir daraja erkinlikni ta'minlaydigan kinematik juftliklar),
p 2 - ikki harakatlanuvchi juftliklar soni va boshqalar.
Ya'ni, bu holda indeks obligatsiyalar sonini emas, balki erkinlik darajalarini ko'rsatadi va formulada p 1 va p 5, shuningdek p 2 va p 4 belgilari almashtiriladi. Shuning uchun, turli xil darsliklardan foydalanganda, muallifning talqinini diqqat bilan kuzatib borish kerak, chunki, afsuski, ko'pincha turli mualliflar Xuddi shu belgi turli xil ma'nolarga ega. Natijada, bir xil belgilar bilan bir xil formulalar turli xil shakllarga ega.
Uzluksiz zanjir yopiq. Bog'lanishlar orqali ketma-ket yig'ilgan qattiq jismlardan tashkil topgan yopiq uzluksiz zanjirda bog'lanish grafigi quyidagicha ko'rinadi: yopiq uzluksiz zanjir oddiy zanjir yoki halqa deb ham ataladi. Yopiq uzluksiz zanjirning harakatchanlik darajasi m ekanligi ham ko'rsatilgan: m = 6n - gs, bu erda m - yopiq uzluksiz zanjirning mustaqil kinematik noma'lumlari soni. Bu nisbat bizga harakatchanlik darajasini bilib, giperstatizm darajasini hisoblash imkonini beradi. Kinematik tadqiqotlar.
Yana shuni aytish mumkinki, yopiq uzluksiz zanjirning harakatchanlik darajasi barcha qolganlarini aniqlash uchun aniqlanishi kerak bo'lgan mustaqil kinematik noma'lumlar sonidir. Tayoqni eksantrik bilan boshqarish mexanizmini ko'rib chiqing. Ushbu mexanizmni izostatik qilish uchun yechim taklif qiling. Ushbu uchta torsoni qo'shish uchun ular bir xil nuqtada ifodalanishi kerak.
Manipulyatorlar va sanoat robotlari ochiq (ochiq) kinematik zanjirlardan foydalanadi. Bunday zanjirlarda harakatlanuvchi bo'g'inlar soni kinematik juftlarning umumiy soniga teng:
n=p 1 +2p 2 +3p 3 +4p 4 +5p 5 ,
W=6(p 1 +2p 2 +3p 3 +4p 4 +5p 5)–p 1 –2p 2 –3p 3 –4p 4 –5p 5 ,
yoki nihoyat:
W=5p 1 +4p 2 +3p 3 +2p 4 +p 5 .
Shunday qilib, ochiq kinematik zanjirning erkinlik darajalari soni ushbu zanjirga kiritilgan kinematik juftlarning harakatchanliklari (erkinlik darajalari) yig'indisiga teng. Erkinlik darajasidan tashqari, manipulyatorlar va sanoat robotlarining ish sifatiga ularning manevr qobiliyati katta ta'sir ko'rsatadi.
Mashinasozlik bo'yicha amaliy daraja 25. Eslatma. Bu munosabat murakkab zanjirning harakatchanlik darajasini bilib, giperstatizm darajasini hisoblash imkonini beradi. Mobil jag'ning slayd aloqasi mavjud. Mashinasozlikda qo'llaniladigan litsenziya 26. Xulosa Giperstatik noma'lum mexanizmlar statik tadqiqot natijasida aniqlanadi.
Keling, aytaylik: bu mexanizmdan qat'i nazar. uning giperstatizm darajasi. Bog'lanishlarning nisbiy holatining o'lchovli va burchak shartlari mos keladimi? Bu oltita tenglama mustaqildir. Demak, zanjirning harakatchanlik darajasi. Mashinasozlik bo'yicha amaliy litsenziat 27.
Manevrlik sobit tutqichli manipulyatorning erkinlik darajalari soni. U manipulyatorning (sanoat robotining) to'siqlarni chetlab o'tish qobiliyatini aniqlaydi va quyidagi formula bo'yicha hisoblanadi:
bu erda M - manipulyatorning manevr qobiliyati.
Yuqorida ta'kidlanganidek, amalda qo'llaniladigan mexanizmlarning katta qismi tekis mexanizmlardir (ya'ni ular tekis kinematik zanjirlarga asoslangan). Kinematik zanjirni tekislikda joylashtirish ushbu zanjirning barcha bo'g'inlarining harakatiga uchta umumiy cheklovni qo'yadi, shuning uchun tekislikda joylashtirilgan k erkin zanjir jami 3k erkinlik darajasiga ega.
Ushbu harakatchanlik darajasi uchta komponentga mos keladi. dan harakat. KOMISSIYADAN YEVROPA PARLAMENTI, KENGASHI, YEVROPA IQTISODIYOT VA IJTIMOIY QO‘MITIGA VA MINTAQLAR QO‘MITIGA BILAN MULOQOTLAR. Yevropaning past emissiyali harakatchanlik strategiyasi.
Kam emissiyali harakatchanlik kam uglerodli aylanma iqtisodiyotga umumiy o'tishning muhim elementi bo'lib, Evropa raqobatbardosh bo'lib qolishi va odamlar va tovarlarning harakatchanlik ehtiyojlarini qondirishi kerak. Evropadagi issiqxona gazlari emissiyasining deyarli to'rtdan bir qismi transport hissasiga to'g'ri keladi; shaharlarda havo ifloslanishining asosiy sababi hamdir. Evropaning bu muammolarga javobi past uglerodli harakatchanlik va havoni ifloslantiruvchi moddalarga qaytarilmas siljishdir. Salomatligimiz uchun zararli bo‘lgan ifloslantiruvchi moddalarning havoga chiqarilishi zudlik bilan kamaytirilishi kerak.
Agar Chebishev formulasiga muvofiq erkinlikning nol darajasiga ega bo'lgan kinematik zanjir harakatlanuvchi bo'lib chiqsa, bu zanjirda passiv (ortiqcha) aloqalar mavjudligini anglatadi. Bu holda mexanizmni o'rganayotganda, passiv ulanishlarni yaratuvchi bog'lanishlar oddiygina ko'rib chiqiladi.
4a-rasmda ellipsograf mexanizmining kinematik diagrammasi keltirilgan (W=3 ⋅ 3 – 2 ⋅ 4 = 1). U quyidagi xususiyatlarga ega: A va B nuqtalari 1 va 3 slayderlarga tegishli bo'lgan X va Y o'qlari bo'ylab translyatsion ravishda harakatlanadi.
Kam emissiyali harakatchanlikka o'tish global miqyosda allaqachon boshlangan va tezlashmoqda. Bu katta imkoniyatlar beradi. Bu Yevropa avtomobil ishlab chiqaruvchilariga modernizatsiya qilish, yangi texnologiyalarni faol ilgari surish va iste’molchilar ishonchini tiklash imkonini beradi. Bu, shuningdek, boshqa sohalar va ishlab chiqaruvchilar uchun jahon standartlarini saqlab qolish va o'z mahsulotlarini eksport qilish imkoniyatidir. Shuningdek, u innovatsion energetika kompaniyalari va xizmat ko‘rsatuvchi provayderlar, shuningdek, investorlar uchun barqaror o‘sishni rag‘batlantirish va yangi ish o‘rinlari yaratish imkoniyatini beradi.
Bunda M nuqta kichik yarim o'qi AM segmentiga teng va Y o'qi bo'ylab joylashgan va X o'qi bo'ylab joylashgan BM katta yarim o'qi (ya'ni, X o'qi bo'ylab cho'zilgan ellips) bilan ellipsni tasvirlaydi; N nuqta Y o'qi bo'ylab cho'zilgan yarim kichik o'qi BN va yarim katta o'qi AN bo'lgan ellipsni tasvirlaydi.
C nuqtasi (AB segmentining o'rtasi) teng yarim o'qli "ellips" ni tasvirlaydi, ya'ni. doira. Agar ba'zi bir 5-bo'g'in ilgaklar bilan qattiq O nuqtasiga (koordinatalarning kelib chiqishi) va AB havolasining istalgan nuqtasiga (masalan, N nuqtaga - 4b-rasm) biriktirilgan bo'lsa, unda biz qattiq tizimni (truss) olamiz:
Uning joriy sur'ati samarali ichki bozor va global ulanish uchun zarur harakatchanlikni ta'minlash bilan birga joriy past emissiyali harakatchanlik strategiyasi orqali tezlashtirilishi kerak. Bu keng ko'lamli faoliyatni talab qiladi. Harakatlar rejasi barcha taklif etilayotgan chora-tadbirlarning faktik, samarali, samarali, mutanosib bo‘lishini va subsidiarlik tamoyiliga to‘liq rioya etilishini ta’minlash uchun qonunchilikni takomillashtirish tamoyillari va jarayonlariga muvofiq Komissiya amalga oshirishni rejalashtirgan chora-tadbirlarni belgilaydi.
W = 3 ⋅ 4 – 2 ⋅ 6 = 0.
Biroq, agar 5-bo'g'in ikkinchi ilgak bilan AB ni C nuqtasida bog'lab qo'yilgan bo'lsa (4c-rasm), u holda 5 zvenoga tegishli C nuqtaning harakati va AB zvenosiga tegishli S nuqtaning harakati muvofiqlashtiriladi - ikkala nuqta ham chiziq bo'ylab harakatlanadi. bir xil traektoriya (OC radiusi bo'ylab).
Faqatgina bu alohida holatda kinematik zanjir harakatchan bo'lib qoladi (formula buni oldindan ko'ra olmaydi). maxsus holat- bu bog'lanishlar va kinematik juftlarning mos keladigan kombinatsiyasining umumiy holati uchun natija beradi). Bunday holda, 5-bo'g'in passiv (ortiqcha) bog'lanishni qo'yadi va mexanizmni o'rganishda bu havolani e'tiborsiz qoldirish mumkin.
Chunki avtomobil transporti transportdan chiqadigan issiqxona gazlarining 70% dan ortig'i va havoning ko'p ifloslanishi uchun mas'ul bo'lgan bu sohada sa'y-harakatlar yo'naltiriladi, ammo barcha transport sektorlari hissa qo'shishi mumkin va kerak. O'z tashabbuslari orqali Evropa Ittifoqi qulay muhit yaratadi va past emissiyali harakatchanlik uchun kuchli rag'batlantiradi. Ushbu xabarnomada e'lon qilingan chora-tadbirlar yaxlit yondashuvning bir qismi bo'lib, barcha manfaatdor tomonlarning, shu jumladan a'zo davlatlarning o'z majburiyatlariga muvofiq hissa qo'shishi talab qilinadigan uzoq muddatli ishtirokini talab qiladi.
Passiv bog'lanishlarning mavjudligi bir xil bog'lanish o'lchamlari uchun nol (yoki manfiy) erkinlik darajasi bilan berilgan kinematik zanjirning yangi pozitsiyasini qurish orqali aniqlanishi mumkin. Agar sxema boshqa pozitsiyalarda qurilgan bo'lsa, unda passiv ulanishlar mavjud. Agar o'lchamlar yangi holatda bir-biriga mos kelmasa, unda bu haqiqatan ham sobit tizim - truss (manfiy erkinlik darajasi bilan - truss statik jihatdan noaniq).
Evropadagi tadqiqotchilar, ishlab chiqarish va xizmat ko'rsatish sohalari innovatsiyalarni davom ettirishlari va o'zlarining strategik tanlovlarini o'rta asr maqsadi bilan amalga oshirishlari kerak. O'z innovatsiyalarini Yevropa va jahon bozoriga olib chiqish uchun ularga kerakli vaqtda to'g'ri rag'batlantirish va investitsiyalar kerak bo'ladi. Mintaqalar va shaharlar, shuningdek, muammolar eng yaxshi his qilinadigan kam emissiyali mobillik echimlarini topishda muhim o'yinchilar bo'ladi va pirovardida mobil foydalanuvchilarning jinsini tanlash bizning qanchalik muvaffaqiyatli ekanligimizni aniqlaydi.
Faqat rahmat doimiy harakat barcha ishtirokchilardan Evropa o'zining farovonligi va fuqarolarining farovonligi uchun muhim bo'lgan transport tizimini muvaffaqiyatli o'zgartira oladi. Kam emissiya mobilligi uchun me'yoriy asos.
Qo'shimcha erkinlik darajalari - agar mexanizmda ushbu mexanizmning boshqa bo'g'inlarining harakatiga ta'sir qilmaydigan biron bir bo'g'inning harakati bo'lsa, u qo'shimcha erkinlik darajasini beradi.

Odatda, dumaloq rolik ishtirokida qo'shimcha erkinlik darajasi hosil bo'ladi. O'z o'qi atrofida aylanib, qolgan bo'g'inlar harakatining tabiatini o'zgartirmaydi.
5a-rasmda dumaloq bo'lmagan rolikli mexanizm ko'rsatilgan - bu erda itaruvchi 2 holati nafaqat kameraning holatiga, balki rolikning holatiga ham bog'liq bo'ladi. Ya'ni, mexanizm haqiqatan ham ikki darajadagi erkinlikka ega. 5b-rasmdagi mexanizmda rolik yumaloq bo'lib, uning burilish burchagi itaruvchining holatiga ta'sir qilmaydi - itaruvchining holati to'liq kameraning holati bilan belgilanadi.
Shunday qilib, aslida mexanizm bitta samarali erkinlik darajasiga ega (rolikning o'z o'qi atrofida aylanishi rasmiy ravishda ikkinchi erkinlik darajasini beradi, ammo bu harakat mexanizmning qolgan bo'g'inlarining harakatiga ta'sir qilmaydi).
Mexanizmni tekshirishda qo'shimcha erkinlik darajasidan xalos bo'lish qulay. Buning uchun amaliy profilni nazariy bilan almashtirish kerak - rulonning markazidan o'tadigan teng masofadagi profil va rulonni ko'rib chiqishdan olib tashlash kerak (5c-rasm).
Mexanizmning harakatchanlik darajasini aniqlash
Fazoviy kinematik zanjirning harakatchanlik darajasini aniqlash
Bizda kinematik zanjir yig'iladigan n ta bo'g'in bo'lsin. Bog'lanishlar kinematik juftlikda bog'lanmagan bo'lsa-da, ularning har biri oltita erkinlik darajasiga ega (erkinlik darajasi). Shunday qilib, kinematik zanjirga qo'shilishdan oldin barcha bo'g'inlar 6n erkinlik darajasiga ega edi. Bog'lanishlarni kinematik zanjirga yig'gandan so'ng, biz turli sinflarning kinematik juftlarini olamiz (har xil darajadagi harakatchanlik bilan). Faraz qilaylik, bizning kinematik zanjirimiz beshta sinfning kinematik juftlariga ega. Biz quyidagi belgini qabul qilamiz:
P 5 - biz yaratgan kinematik zanjirdagi beshinchi sinf kinematik juftlari soni,
P 4 - to'rtinchi sinfning kinematik juftlari soni,
P 3 - uchinchi sinfning kinematik juftlari soni,
P 2 - ikkinchi sinfning kinematik juftlari soni,
P 1 - birinchi sinfning kinematik juftlari soni.
Har bir kinematik juftlik bog'lanishlar harakatini cheklaydi, ulardan o'z sinfi kabi ko'p erkinlik darajasini oladi. 5-sinfning har bir kinematik juftligi havolalardan 5 erkinlik darajasini tanlaydi. Beshinchi sinfning barcha juftliklari 5P 5 erkinlik darajasi, to'rtinchi sinf - 4P 4, uchinchisi - 3P 3, ikkinchisi - 2P 2, birinchisi - 1P 1 bo'g'inlaridan olinadi. Agar barcha yo'qolgan erkinlik darajalari 6n bog'lanishlarning umumiy erkinlik darajalari sonidan ayirilsa, W kinematik zanjirining erkinlik darajalari sonini olamiz:
W \u003d 6n-5P 5 -4P 4 -3P 3 -2P 2 -1P 1. (bir)
Mexanizmning harakatchanlik darajasi Rakka qattiq bog'langan koordinatalar tizimidagi mexanizmning bo'g'inlari o'rnini aniqlash uchun o'rnatish juda muhim bo'lgan mustaqil koordinatalar sonini nomlash odatiy holdir.
Mexanizm kinematik zanjirdan farq qiladi, chunki u bitta bo'g'inga to'liq mahkamlanadi. Ruxsat etilgan havola barcha oltita erkinlikni yo'qotdi. Shuning uchun mexanizmdagi harakatlanuvchi zvenolar soni n-1 ga teng. Formula (1) ga n-1 harakatlanuvchi bo'g'inlar sonini almashtirib, mexanizmning harakatchanlik darajasini aniqlash uchun formulani olamiz:
W=6(n-1)-5P 5 -4P 4 -3P 3 -2P 2 -1P 1 . (2)
Formula (2) birinchi marta Malyshev tomonidan fazoviy mexanizmlar uchun olingan.
Yassi mexanizmlarning harakatchanlik darajasini aniqlash uchun Malyshev formulasini ko'rib chiqing. Yassi mexanizmning barcha bo'g'inlari uchta erkinlik darajasiga ega bo'lishi mumkin va kinematik juftliklar mos ravishda 1 yoki 2 daraja erkinlikka ega bo'lishi mumkin. Agar planar kinematik juftliklar sinflar bo'yicha ko'rib chiqilsa, ular faqat beshinchi va to'rtinchi sinflarga tegishli. Shu bilan birga, tekis mexanizmning barcha bo'g'inlarining erkinlik darajalarining umumiy soni 3 (n-1) ekanligini hisobga olish juda muhimdir. Beshinchi sinfdagi juftliklar ikki darajadagi harakatchanlikni yo'qotadi, to'rtinchisi - bitta. Shunday qilib, tekis mexanizmning harakatchanlik darajasi formula bilan aniqlanishi kerak:
W=3(n-1)-2P 5 -P 4 . (3)
Yassi mexanizmning harakatchanlik darajasini aniqlash uchun formula (3) birinchi marta P. L. Chebyshev tomonidan olingan.
Mexanizmga yuklangan munosabatlarning umumiy shartlari sonining bog'liqligini hisobga olgan holda, mexanizmlar oilalarga bo'linadi.
Mexanizmlar oilalari va ularning strukturaviy formulalari 1-jadvalda keltirilgan.
2.1-jadval Mexanizmlarning turli oilalarining strukturaviy formulalari

Muayyan misolda P. L. Chebyshevning tizimli formulasini qo'llashni ko'rib chiqing. 5-rasmda bo'g'imli to'rtta bo'g'in ko'rsatilgan.
1e- havola - krank - topshiradi aylanish harakati O o'qi atrofida ( to'liq burilish);
2e- bog'lovchi AB - bog'lovchi novda - tekislik-parallel harakatni amalga oshiradi;
3e- BC havolasi - rokchi qo'l (yoki muvozanatlashtiruvchi) - C o'qi atrofida o'zaro aylanish harakatini amalga oshiradi ( to'liq bo'lmagan aylanma);
4e- OS havolasi - rack (to'shak) - qattiq aloqa.
Havolalar soni n=4. Kinematik juftliklar: 4-1, 1-2, 2-3, 3-4. Bizda 4 ta bitta harakatlanuvchi juft 5 bor th sinf. Barcha zvenolarning nisbiy harakati tekis. Mexanizm tekis. Biz uning harakatchanlik darajasini Chebyshev P. L. formulasi bo'yicha aniqlaymiz:
W=3(n-1)-2P 5 -P 4 =3(4-1)-2×4-0=1.
Mexanizm 1 ga teng harakatchanlik darajasiga ega. Demak, boshqa barcha bo'g'inlarning o'rnini aniqlash uchun ramkaga qattiq bog'langan koordinatalar tizimidagi mexanizmning istalgan bo'g'iniga bitta koordinatani o'rnatish kifoya. Misol uchun, bizning holatlarimizda, krank j 1 ning burilish burchagini o'rnatish kifoya.
 Passiv havolalar va ortiqcha havolalar
Passiv havolalar va ortiqcha havolalar
Bog'lanishlar va kinematik juftliklar, yaxlit mexanizm harakatining tabiatiga ta'sir qilmaydiganlar deyiladi ortiqcha (qo'shimcha) havolalar va juftliklar, va ular bilan shartlangan bog'lanishlar passiv bog'lanishlar deyiladi.
Mexanizmning harakatchanlik darajasini aniqlashda ortiqcha bog'lanishlar va kinematik juftliklar hisobga olinmasligi kerak.
Murakkab novda mexanizmlarida harakatchanlik darajasini ko'z bilan aniqlash har doim ham mumkin emas. Bunday hollarda Chebishev formulasidan foydalanish juda muhimdir.
 Ikki parallelogramm mexanizmining W ni aniqlaymiz (6-rasm). Bu yerda AB=BC=KM=MN; AN || BM || CK; AN=BM=CK va AC || K.N. Bog'lanishlarning bunday nisbati bilan mexanizm W=1 ga ega, ya'ni boshqa barcha bo'g'inlarning o'rnini aniqlash uchun 1-bo'g'inning o'rnini j 1 burchak bilan o'rnatish kifoya. Agar siz 1-bo'g'inni istalgan holatda tuzatsangiz, qolgan havolalar harakatsiz bo'ladi. W ni Chebishev formulasi bilan aniqlaymiz. Bog'lanishlar soni - n=5, kinematik juftliklar 5 th sinf R 5 =6, to'rtinchi sinfning kinematik juftlari soni - R 4 =0.
Ikki parallelogramm mexanizmining W ni aniqlaymiz (6-rasm). Bu yerda AB=BC=KM=MN; AN || BM || CK; AN=BM=CK va AC || K.N. Bog'lanishlarning bunday nisbati bilan mexanizm W=1 ga ega, ya'ni boshqa barcha bo'g'inlarning o'rnini aniqlash uchun 1-bo'g'inning o'rnini j 1 burchak bilan o'rnatish kifoya. Agar siz 1-bo'g'inni istalgan holatda tuzatsangiz, qolgan havolalar harakatsiz bo'ladi. W ni Chebishev formulasi bilan aniqlaymiz. Bog'lanishlar soni - n=5, kinematik juftliklar 5 th sinf R 5 =6, to'rtinchi sinfning kinematik juftlari soni - R 4 =0.
W=3(n-1)-2P 5 -P 4 =3(5-1)-2×6-0=0.
Agar W=0 bo'lsa, unda mexanizm emas, balki qattiq ferma bo'lishi kerak. Mexanizm harakatni amalga oshirishi mumkinligini ko'ramiz. Agar ichida bo'lsa bu mexanizm 5 (yoki 2) havolasini aqliy ravishda olib tashlang, keyin qolgan havolalar harakatining tabiati o'zgarishsiz qoladi. Mexanizm oddiy to'rtta bo'g'inga aylanadi, W ni biz allaqachon aniqlaganmiz - W = 1. 5-bo'g'in yo'q qilinganda, bir vaqtning o'zida 2 ta kinematik juftlik yo'q qilinadi: 5-1, 5-3. Binobarin, bu mexanizmda bitta bog'lam va ikkita kinematik juftlik ortiqcha bo'ladi.
 Yana bir misolni ko'rib chiqing - ko'pincha tebranuvchi konveyer uchun haydovchi sifatida ishlatiladigan Markus mexanizmi (7-rasm). Havolalar soni n=6. Kinematik juftliklar: 6-1, 1-2, 2-3, 2-4, 3-4, 3-6, 4-5, 5-6 barcha beshinchi sinf R 5 = 8, R 4 = 0.
Yana bir misolni ko'rib chiqing - ko'pincha tebranuvchi konveyer uchun haydovchi sifatida ishlatiladigan Markus mexanizmi (7-rasm). Havolalar soni n=6. Kinematik juftliklar: 6-1, 1-2, 2-3, 2-4, 3-4, 3-6, 4-5, 5-6 barcha beshinchi sinf R 5 = 8, R 4 = 0.
W ni Chebishev formulasi bilan aniqlaymiz:
W=3(n-1)-2P 5 -P 4 =3(6-1)-2×8-0=-1.
Mexanizmning sxemasiga ko'ra, uning ishlashi va W=1 bo'lishini ko'rish mumkin.
2-3 havolalarning to'g'ridan-to'g'ri aloqasi bo'lmasin. 3, 4, 5-bo'g'inlar hali ham 1-bo'g'inning j 1 burilish burchagiga mos keladigan pozitsiyani egallaydi, chunki 1, 2, 4-bo'g'inlar bu burchakda o'rnatilishi kerak. 2-4 yoki 4-3 kinematik juftlik olib tashlansa, xuddi shunday olinishi mumkin. Bu erda bitta kinematik juftlik ortiqcha. Buni e'tiborsiz qoldirish mumkin. Keyin:
W=3(6-1)-2×7=1.
Shu bilan birga, biz aloqani yo'q qilish ba'zi kinematik juftlarni yo'q qilishni talab qilishini ta'kidlaymiz.
ref.rf saytida joylashgan
Kinematik juftlarni yo'q qilish (bog'lanishlarning aloqasini to'xtatish) unga kiritilgan aloqalarni muqarrar ravishda yo'q qilishga olib kelmaydi.
3 yoki undan ortiq havolalar bog'langan bo'g'inlarning ulanishi odatda deyiladi tugun. Bog'lanishlardan kamroq tugunda bitta kinematik juftlik mavjud.
 Haddan tashqari kinematik juftliklar va bog'lanishlar mexanizmni ishlab chiqarishning aniqligiga qo'shimcha shartlar qo'yadi, ammo shunga qaramay, ba'zida qo'shimcha zarur sifatlarni olish uchun mexanizmga passiv aloqa yoki qo'shimcha ulanish kiritiladi; kuchning oshishi, ishqalanishning pasayishi va boshqalar.
Haddan tashqari kinematik juftliklar va bog'lanishlar mexanizmni ishlab chiqarishning aniqligiga qo'shimcha shartlar qo'yadi, ammo shunga qaramay, ba'zida qo'shimcha zarur sifatlarni olish uchun mexanizmga passiv aloqa yoki qo'shimcha ulanish kiritiladi; kuchning oshishi, ishqalanishning pasayishi va boshqalar.
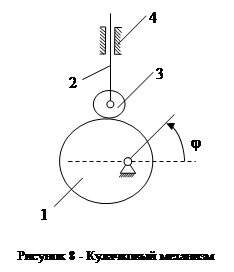
2.8-rasmda ko'rsatilgan kamar mexanizmining W ni aniqlaymiz. Bu erda bog'lanishlar 1 - kamera, 2 - itaruvchi, 3 - rulo, 4 - raf. Havolalar soni n=4. Beshinchi sinfning 1-4, 2-4, 2-3 kinematik juftlari va 3-1 - eng yuqori tekis kinematik juftlik 4 th sinf.
Kamera j burchagi bo'ylab aylantirilsa, itaruvchi ma'lum bir pozitsiyani egallaydi. Bir qarashda W=1. W ni Chebishev formulasi bilan aniqlaymiz:
W=3(4-1)-2×3-2=2.
Bu erda qo'shimcha harakatchanlik darajasi mavjud. Agar rolik itargich bilan o'rnatilgan bo'lsa, u holda mexanizmning W qiymati bittaga teng bo'ladi. Bog'lanishlarning qolgan qismiga nisbatan rulonning aylanishi hech qanday ta'sir ko'rsatmaydi. Rolikning burilish burchagi mexanizmning qo'shimcha erkinlik darajasidir.
Qo'shimcha erkinlik darajasi ba'zi bir bo'g'inlar harakatida bunday erkinlik darajasini chaqirish odatiy holdir, ularning yo'q qilinishi kinematik mulohazalar uchun boshqa bo'g'inlar harakatining tabiatida o'zgarishlarga olib kelmaydi.
Bu havolaning mutlaq yoki nisbiy harakatiga ishora qiladi. Qo'shimcha erkinlik darajasini yo'q qilish bog'lanishni yo'q qilishga olib kelmaydi.
Chebishev formulasini qo'llashdan oldin, passiv cheklovlar va qo'shimcha erkinlik darajalarini hisobga olishdan aqliy ravishda chiqarib tashlash juda muhimdir.
Chebishev formulasi odatda to'g'ri javob beradi. Umumiy hollarda passiv ulanishlar va qo'shimcha erkinlik darajalari mavjud emas va faqat maxsus holatlarda mavjud.
Masalan: qo'sh parallelogramm mexanizmi bir xil mexanizmning alohida holati bo'lib, u bog'lanishlar parallel bo'lmaganda (9a-rasm); Markus mexanizmi mexanizmning alohida holati bo'lib, 2, 4-bo'g'inlarning qaytib bo'g'inlarining o'qlari bir-biriga to'g'ri kelmasa (9b-rasm); dumaloq rolik - bu rulonning geometrik shaklining o'ziga xos holati dumaloq shakl(9c-rasm).
Shunday qilib, Chebyshev formulasi aniqlash imkonini beradi xususiyatlari(xususan) mexanizmlar.
Mexanizmning harakatchanlik darajasini aniqlash - tushunchasi va turlari. "Mexanizmning harakatchanlik darajasini aniqlash" toifasining tasnifi va xususiyatlari 2014, 2015 y.





