Kinematik juftlarning turlari. Boshqa lug'atlarda "Kinematik juftlik" nima ekanligini ko'ring
Kinematik juftlik - bu ikkita qo'shni bo'g'inlarning harakatchan aloqasi bo'lib, ular ma'lum bir nisbiy harakatni ta'minlaydi. Kinematik juftlikning elementlari - bu ikki bo'g'inning harakatlanuvchi ulanishi sodir bo'lgan va kinematik juftlikni tashkil etuvchi chiziqlar yoki nuqtalar sirtlari to'plami. Juftlik mavjud boʻlishi uchun uni tashkil etuvchi boʻgʻinlar elementlari doimiy aloqada boʻlishi kerak T.
Bunday bo'g'inga misol - son bo'g'imi. Ikki erkinlik darajasi yoki bir darajadagi erkinlik bo'g'inlari ham mavjud. Ularning harakatchanligi tufayli zanjirlar quyidagilarga bo'linadi: qattiq, normal va bo'sh. Qattiq zanjir alohida holat Ismning o'zi oksimoronga o'xshaydi. Biz harakat qilmaydigan kinematik zanjir bilan shug'ullanishimiz kerak! U qurilish inshootlarida qo'llaniladi va mexanikaga qiziqish mavzusi emas. Eng ko'p ishlatiladigan kinematik zanjir to'g'ri zanjirdir.
Bunday zanjirda bir elementning harakati tizimning barcha boshqa elementlarining harakatiga ta'sir qiladi. Keyin erkin zanjir qo'llaniladi. Erkin zanjirga misol sifatida vites qutisi, bir yoki bir nechta g'ildiraklarning qattiq aylanish o'qi bo'lmagan viteslardan tashkil topgan vites qutisi kiradi.
Ishlaringizni ijtimoiy tarmoqlarda baham ko'ring
Agar ushbu ish sizga mos kelmasa, sahifaning pastki qismida shunga o'xshash ishlar ro'yxati mavjud. Qidiruv tugmasidan ham foydalanishingiz mumkin
2-ma'ruza
Mashinaning mexanizmi qanday bo'lishidan qat'i nazar, u har doim faqat bog'lamlar va kinematik juftliklardan iborat.
Harakatlanuvchi zvenolarga mexanizmlarda, mashinalar va mexanizmlar nazariyasida qo'yilgan ulanish shartlari Kinematik juftlarni chaqirish odatiy holdir.
Hozirgi vaqtda kinematik zanjirlar ko'pchilikni tasvirlash uchun ishlatiladi murakkab tizimlar harakat. Bu, ayniqsa, robototexnikaga tegishli. Misol uchun, manipulyatorning harakati, ya'ni robotning inson qo'lining ba'zi funktsiyalarini bajara oladigan qismi robotda ko'rsatilgan elementlardan va ular orasidagi harakatlanuvchi bo'g'inlardan iborat kinematik zanjir sifatida tasvirlangan. ulagichlar yoki ilgaklardan iborat. Ammo kinematik zanjir tushunchasi inson tanasining harakatini tavsiflashda ham qo'llaniladi. Kinematik zanjir bu erda harakat tizimini tashkil etuvchi bir necha ketma-ket bo'g'inlarning birikmasi sifatida aniqlanadi.
Kinematik juftlikikkita qoʻshni boʻgʻinning harakatlanuvchi bogʻlanishi, ularni maʼlum bir nisbiy harakat bilan taʼminlovchi deb ataladi.
Jadvalda. 2.1 amalda eng keng tarqalgan kinematik juftlarning nomlari, chizmalari, belgilarini, shuningdek ularning tasnifini ko'rsatadi.
Bog'lanishlar kinematik juftlikka birlashganda, sirtlar, chiziqlar va nuqtalar bo'ylab bir-biriga tegishi mumkin.
Odatda bu oddiy, oddiy zanjir. Hovuzlar, bu erda ko'rinib turganidek, kinematik juftliklar, suyaklar esa zanjirning sobit elementlari hisoblanadi. Inson biomexanikasi, shuningdek, kinematik zanjirlarni ochiq va yopiq zanjirlarga bo'linish bilan tanishtiradi. Yopiq sxemada uning so'nggi chizig'i erkin emas. Inson tanasida ikkita yopiq kinematik mavjud - ko'krak va tos suyagi. Boshqa tomondan, ochiq kinematik zanjir - bu oxirgi bo'g'in erkin bo'lgan va faqat bitta qo'shni bo'g'in bilan bog'langan.
Oyoq-qo'llar tomonidan bajariladigan harakatlarning aksariyati nishonlarni ochishga imkon beradi, chunki ularning uchlarida olovli qo'l yoki oyog'i bor. Boshqa tomondan, ko'plab ishlar bajarildi inson tanasi yerga ulashni ham talab qiladi. Misol uchun, arqonning oyog'ini tortganda, son mushaklari va oyoq ostidagi zamin chiziqning er bo'ylab harakatlanishini ta'minlaydigan yopiq kontur turi deb hisoblanishi mumkin.
Kinematik juftlik elementlariular bo'ylab ikki bo'g'inning harakatlanuvchi ulanishi sodir bo'ladigan va kinematik juftlikni tashkil etuvchi yuzalar, chiziqlar yoki nuqtalar to'plamini chaqiradilar. Kinematik juftlik elementlarining aloqa turiga qarab, mavjud balandroq va pastroq kinematik juftliklar.
Kinematik juftliklar, chiziq yoki nuqta ko'rinishidagi elementlar tomonidan hosil qilingan, deyiladi yuqoriroq.
Biokinetik juftlik qattiq qattiq elementlar va bo'g'inlarni hosil qiladi. Erkinlik darajasi bo'g'indagi mustaqil harakat, erkinlik darajalari soni esa qattiq jismning mustaqil nisbiy harakatlarining umumiy soni deb ataladi. Biriktirilgan tana 6 daraja erkinlikka ega: u 3 eksa atrofida 3 ta aylanish harakatini va ular bo'ylab 3 ta progressiv harakatni amalga oshirishi mumkin. U 5 darajadan ortiq erkinlikka ega bo'lishi mumkin emas. Elementlarning nisbiy harakati 5 darajadan kam yoki 1-3 mm bo'lsa, u holda kombinatsiya kinematik juftlik emas, balki o'yin sifatida qabul qilinadi.
Elementlar tomonidan sirt shaklida hosil bo'lgan kinematik juftliklar deyiladi pastroq.
Juftlik mavjud bo'lishi uchun uning tarkibiy qismlarining elementlari doimiy aloqada bo'lishi kerak, ya'ni. yopiq bo'lish. Kinematik juftlarning yopilishi bo'lishi mumkingeometrik yoki kuch bilan, Masalan, o'z massasi, buloqlar va boshqalar yordamida.
Kinematik juftlik sinfi orasidagi farq bo'lgan raqamni belgilaydi maksimal raqam a'zoning erkinlik darajalari va berilgan birikmaning erkinlik darajalari soni. Odamlarda suyak-artikulyar tizimda faqat aylanish harakatlari mumkin. Bu tortib oladigan va itarib bo'lmaydigan bir tomonlama mushak harakati natijasidir. Sferik va asetabulyar bo'g'inlar uchta erkinlik darajasiga ega. Biokistik zanjir - bu juft biokinetik juftliklar bilan bog'langan izchil elementlar to'plami. O'chirish ochiq yoki yopiq bo'lishi mumkin.
Oxirgi havola bo'sh bo'lganda ochiq zanjir haqida gapiramiz, bu, masalan, barmoq bo'lishi mumkin. Manipulyatorlar va sanoat robotlari ko'pincha ochiq kinematik zanjirga ega. Bu zanjirlar ishchi uchining, ya'ni effektorning fazoviy harakati va yo'nalishini ta'minlaydigan bir nechta faol bo'g'inlardan iborat.
Kinematik juftlarning mustahkamligi, aşınmaya bardoshliligi va chidamliligi ularning turiga va dizayniga bog'liq. Pastki juftliklar yuqoriroqlarga qaraganda ko'proq aşınmaya bardoshli. Bu pastki juftliklarda juft elementlarning aloqasi sirt bo'ylab sodir bo'lishi bilan izohlanadi va shuning uchun bir xil yuk bilan undagi yuqori bosimga qaraganda pastroq o'ziga xos bosim paydo bo'ladi. Kiyinish, ceteris paribus, o'ziga xos bosimga mutanosibdir va shuning uchun pastki Juftlar yuqoriroqlarga qaraganda sekinroq eskiradi. Shuning uchun, mashinalarda eskirishni kamaytirish uchun, pastki juftlarni ishlatish afzaldir, lekin ko'pincha yuqori kinematik juftliklardan foydalanish mashinalarning strukturaviy diagrammalarini sezilarli darajada soddalashtirishga imkon beradi, bu ularning o'lchamlarini kamaytiradi va dizaynni soddalashtiradi. Shuning uchun kinematik juftlarni to'g'ri tanlash murakkab muhandislik muammosidir.
Erkinlik darajalari soni - fazoviy joylashuvni yagona aniqlash uchun ko'rsatilishi kerak bo'lgan o'zgaruvchan pozitsiyalar soni. Erkinlik darajalari sonini aniqlash uchun formuladan foydalaning. Yuqoridagi formulaga asoslanib, bir nechta oddiy manipulyatorlar uchun erkinlik darajalari soni aniqlanadi.
Tenglamadan foydalanib, erkinlik darajalari soni tenglashtiriladi. Manipulyatorning to'rtta erkinlik darajasiga ega bo'lishi uchun, rasmda ko'rsatilganidek, to'rtta drayverdan foydalaning. Manipulyatorning muayyan vazifalarni bajarishi uchun 7-rasmda ko'rsatilganidek, 5 ta aktuatordan foydalaning.
Kinematik juftliklar ham bo'linadierkinlik darajalari soni(harakatchanlik), u orqali bog'langan havolalar uchun mavjud qiladi, yokiulanish shartlari soni(juftlik sinfi), bog'langan bo'g'inlarning nisbiy harakatiga juft tomonidan yuklangan. Bunday tasnifdan foydalanganda, mashina ishlab chiqaruvchilari ulanishlarning mumkin bo'lgan nisbiy harakatlari va juftlik elementlari orasidagi kuch omillarining o'zaro ta'sirining tabiati haqida ma'lumot oladilar.
Ochiq kinematik zanjirning erkinlik darajalari sonini kuzatish oson bo'lganligi sababli, u aylanuvchi va sirg'aluvchi beshinchi sinflarning kinematik juftlari soniga teng. Otalardan boshqa kinematik juftliklar uchun shablon mos ravishda qo'llanilishi yoki aylanuvchi yoki toymasin poshnali barcha kinematik juftlarni almashtirish kerak.
Ushbu muammoni hal qilishning bir necha yo'li mavjud: siz sharli birikmani uchta nol joy almashinadigan aylanadigan bo'g'inlar bilan almashtirishingiz mumkin yoki chizilgan uchun mos kinematik juftlikni almashtirishingiz mumkin. DOF hisob-kitoblaridan ko'rinib turibdiki, shaklda ko'rsatilganidek, alohida komponentlarga 6 ta aktuator qo'llanilishi kerak.
Umumiy holatda bo'lgan bepul havola M - o'lchovli bo'shliq, ruxsat berish P eng oddiy harakatlar turlari, bir qator erkinlik darajalariga ega! ( H) yoki W - harakatlanuvchi.
Shunday qilib, agar havola uch o'lchamli bo'shliqda bo'lsa, olti turdagi oddiy harakatlarga imkon beradi - o'qlar atrofida va bo'ylab uchta aylanish va uchta tarjima. X, V, Z , keyin biz oltita erkinlik darajasiga ega yoki oltita umumlashtirilgan koordinataga ega yoki oltita harakatlanuvchi deb aytamiz. Agar havola uch turdagi oddiy harakatlarga imkon beruvchi ikki o'lchovli makonda bo'lsa - atrofida bir aylanish Z va o'qlar bo'ylab ikkita tarjima X va Y , keyin ular uchta erkinlik darajasiga yoki uchta umumlashtirilgan koordinataga ega yoki uchta harakatlanuvchi va hokazo deb aytishadi.
Quyida introspektsiya uchun ma'lum miqdordagi erkinlik darajasiga ega manipulyatorlarning diagrammalari keltirilgan. Biriktirilgan qo'zg'aluvchan kinematik juftlikni tashkil etuvchi kinematik komponentlar, ular nisbiy kinematik juftlarning harakatlanishini harakat blokini yaratishga imkon beradi.
Manipulyatorning kinematik bloki yaratadi kinematik mexanizm biriktirilgan drayvlar bilan. Manipulyatsiya mashinasining mexanizmi ikkita kinematik parametrni aniqlaydi. Mobillik - immobilizatsiyalangan mexanizmning kinematik zanjirining erkinlik darajalari soni - asos; manevrlik - qo'zg'almas mexanizmning kinematik zanjirining erkinlik darajalari soni: element asosdir va element kinematik zanjirda oxirgi hisoblanadi. Ushbu parametrlarning birinchisi mexanizmni to'liq immobilizatsiya qilish uchun unga joylashtirilishi kerak bo'lgan bog'lanishlar sonini ko'rsatadi.
2.1-jadval
Bog'lanishlar kinematik juftliklar yordamida birlashtirilganda, ular erkinlik darajasini yo'qotadilar. Bu shuni anglatadiki, kinematik juftliklar raqam orqali bog'laydigan bog'lanishlarga yuklaydi S.
Kinematik juftlikka birlashtirilgan bog'lanishlar nisbiy harakatga ega bo'lgan erkinlik darajalari soniga qarab, juftlikning harakatchanligini aniqlang ( W = H ). Agar H nisbiy harakatdagi kinematik juftlik bo'g'inlarining erkinlik darajalari soni bo'lsa, uchun juft harakatchanlik quyidagicha aniqlanadi:
Xuddi shunday, lekin oxirgi erkin elementning qo'shimcha immobilizatsiyasidan so'ng, masalan, kinematik birlikning ushlagichi yoki asbobi aniq belgilangan pozitsiyani egallaganida, mexanizmning harakat erkinligini aniqlaydi. Mobillik va manevrlik raqamlari kabi sintetik parametrlarga qo'shimcha ravishda, manipulyatorning kinematik birligining mexanizmi uning umumiy geometrik xususiyatlari bilan tavsiflanadi, ya'ni rasmda namunaviy manipulyator uchun ko'rsatilgan kinematik tuzilma deb ataladi.
Kinematik tuzilma tushunchasi ostida zanjir yoki mexanizm a'zolarning nomlari va kinematik juftliklardan foydalangan holda eskiz ko'rinishidagi kinematik diagrammaning ta'rifi sifatida aniqlanadi. Ko'pincha, manipulyatorning tuzilishi murakkab bo'lsa, kinematik tuzilmani uch o'lchovli fazoda tasvirlash mumkin, bu rasmda ko'rsatilgan. 11-rasmda ko'rsatilgan tasvirlangan manipulyator uchun.
qaerda P - ko'rib chiqilayotgan juftlik mavjud bo'lgan makonning harakatchanligi; S - juftlik tomonidan qo'yilgan obligatsiyalar soni.
Shuni ta'kidlash kerakki, juftlikning harakatchanligi V , (2.1) bilan belgilangan, u amalga oshirilgan makon turiga bog'liq emas, balki faqat qurilishga bog'liq.
Masalan, oltita va uchta harakatlanuvchi bo'shliqda aylanma (tarjima) (2.1-jadvalga qarang) juftlik hali ham bitta harakatlanuvchi bo'lib qoladi, birinchi holatda unga 5 ta bog'lanish qo'yiladi, ikkinchi holda - 2 ta obligatsiyalar va shuning uchun biz mos ravishda:
Kinematik blokning tuzilishi kinematik diagrammaning o'lchamlari va harakatlantiruvchilarning harakat diapazoni tavsifi bilan birga mexanizmning harakatini va natijada asbobning ushlash yoki harakatini aniq belgilaydi. Operatsion sabablarga ko'ra, bu bo'shliq o'lchovli eskizdan mustaqil ravishda, shuningdek, hajm bo'yicha ham tasvirlangan. Ish maydonida quyidagi sohalar ta'kidlangan.
Misol uchun, rasmda ko'rsatilgan manipulyator tuzilishi uchun. 10, asosiy ish maydoni shaklda ko'rsatilgan. Ishchi va to'qnashuv joylari quyidagilarga bo'linadi: mexanik va rul. Mexanik bo'shliqlar kinematik birlikning strukturaviy xususiyatlaridan kelib chiqadigan korrelyatsiyalar bilan, masalan, bog'lanishlar yig'indisi, statik va dinamik deformatsiyalar va boshqalardan kelib chiqadi. bu bo'shliqlar odatda tishli geometriyasi asosida aniqlangan nominal bo'shliqlardan kattaroqdir. Boshqaruv bo'shliqlari o'zgartirishni o'lchash tizimlarining xususiyatlari, ishlov berish cheklovlari va boshqaruv tizimining o'zi bilan bog'liq bo'lgan nazorat chegaralarini o'z ichiga oladi, masalan, servo nazorat oralig'i chegaralari.
oltita harakatlanuvchi joy uchun:
uchta harakatlanuvchi joy uchun:
Ko'rib turganingizdek, kinematik juftlarning harakatchanligi kosmosning xususiyatlariga bog'liq emas, bu esa ushbu tasnifning afzalligi hisoblanadi. Aksincha, kinematik juftlarning sinflarga tez-tez bo'linishi, juftlikning sinfi makonning Xarakteristikasiga bog'liqligidan aziyat chekadi, ya'ni turli fazolardagi bir xil juftlik boshqa sinfga ega. Bu amaliy maqsadlar uchun noqulay, ya'ni kinematik juftlarning bunday tasnifi irratsionaldir, shuning uchun uni ishlatmaslik yaxshiroqdir.
Bu bo'shliqlar odatda nominaldan kamroq. Ish joyining hajmi va o'tish yoki to'qnashuvning nisbati manipulyatsiya mashinasining kinematik birligi tomonidan qabul qilingan qarorning to'g'riligini aniqlaydi, yechim yaxshiroq, to'qnashuv maydonining ko'p qismi ish joyini egallaydi. Parametrlar sifatida koeffitsientlar ifodalar bilan beriladi.
Ba'zi dastlabki manipulyator diagrammalariga alohida elementlar uchun bir qator harakatlar berilgan va ularning asosiy batafsil naqshlari quyida ko'rsatilgan. Transport - xalq xo'jaligining turli yo'llar bilan yuk va yo'lovchilarni tashishni qamrab oluvchi tarmog'i. Infratuzilma transport vositalari.
Juftlik elementlarining shunday shaklini tanlash mumkin, shunda bitta mustaqil elementar harakat bilan ikkinchisi - qaram (hosil) paydo bo'ladi. Bunday kinematik juftlikka vintni misol qilib keltirish mumkin (2-jadval. 1) . Bu juftlikda vintning (gaykaning) aylanish harakati uning eksa bo'ylab translatsion harakatiga sabab bo'ladi. Bunday juftlik bitta harakatlanuvchiga tegishli bo'lishi kerak, chunki unda faqat bitta mustaqil oddiy harakat amalga oshiriladi.
Qishloqda. Umumiy foydalanish. Pastga qarab foydalanish. Texnika - inson faoliyatining moddiy vositalari. Odamlarni ishga tushiradi, ularni kichikroq qiladi. Eng saxiy - ishlab chiqarish texnikasi. Transport. Sport ta'limi va madaniyati.
Mexanizm - bu bir yoki bir nechta jismlarning harakati boshqa jismlarning to'g'ri harakatiga aylanadigan tana tizimi. Mashina - energiya, material yoki ma'lumotni aylantirish uchun mexanik harakat qurilmasi. Maqsad - insonning jismoniy yoki aqliy mehnatini engillashtirish.
Kinematik aloqalar.
Kinematik juftliklar jadvalda keltirilgan. 2.1, oddiy va ixcham. Ular mexanizmlarni yaratish uchun zarur bo'lgan bog'lanishlarning deyarli barcha eng oddiy nisbiy harakatlarini amalga oshiradilar. Biroq, mashinalar va mexanizmlarni yaratishda ular kamdan-kam qo'llaniladi. Buning sababi shundaki, katta ishqalanish kuchlari odatda juftlikni tashkil etuvchi bo'g'inlarning aloqa nuqtalarida paydo bo'ladi. Bu juftlik elementlarining sezilarli darajada aşınmasına va shuning uchun uning yo'q qilinishiga olib keladi. Shuning uchun, kinematik juftlikning eng oddiy ikki bo'g'inli kinematik zanjiri ko'pincha uzunroq kinematik zanjirlar bilan almashtiriladi, ular birgalikda kinematik juftlik almashtirilganda bo'g'inlarning bir xil nisbiy harakatini amalga oshiradilar.
Iste'mol qilish xususiyatiga ko'ra avtomobillar quyidagilarga bo'linadi. Energiya mashinasi - bu har qanday turdagi energiyani mexanik energiyaga va aksincha o'zgartirish uchun ishlatiladigan mashina. Har qanday energiya mexanikaga aylantirilsa, unda bunday mashinalar dvigatellardir. Agar mexanikdan har qanday bo'lsa - generatorlar.
Ish mashinasi - bu foydalanadigan mashina mexanik energiya materiallarni aylantirish uchun dvigateldan yoki boshqa energiya manbasidan. Ishchi mashinalar quyidagilarga bo'linadi: Texnologik transport. Axborot mashinalari - jarayon haqida ma'lumot. Kibernetik mashinalar - inson va tabiatga xos bo'lgan mexanizmlar, fiziologik va biologik jarayonlarning kirishlarini o'zgartirish yoki simulyatsiya qilish. U sun'iy intellekt elementlari bilan ajralib turadi.
Kinematik juftlikni almashtirish uchun mo'ljallangan kinematik zanjir kinematik ulanish deb ataladi.
Amalda eng keng tarqalgan aylanma, translatsiya, spiral, sferik va tekislikdan tekislik kinematik juftliklari uchun kinematik zanjirlarga misollar keltiramiz.
Jadvaldan. 2.1 dan ko'rinib turibdiki, aylanuvchi kinematik juftlikning eng oddiy analogi aylanma elementlari bo'lgan rulmandir. Xuddi shunday, rolikli qo'llanmalar chiziqli juftlikni almashtiradi va hokazo.
Asboblar - o'lchash uchun ishlatiladigan asboblar jismoniy miqdorlar, nazorat jarayonlari, nazorat va tartibga solishni avtomatlashtirish. Mexanizmlar - bu harakatlanuvchi qismlarning kombinatsiyasi bo'lib, ular bir harakatni boshqalarning zarur harakati uchun o'zgartiradi. qattiq moddalar. Suyuqlik harakatning o'zgarishi bilan almashtirilganda, bu gaz pnevmatik bo'lgan gidravlik mexanizmlardir.
Asosiy dvigatel motori ichki yonish toymasin piston rodini aylanadigan krank miliga aylantiruvchi slayder volan mexanizmi. Kompressorning eng muhim mexanizmi krank milining aylanish harakatini pistonning toymasin harakatiga aylantiradi.
Kinematik ulanishlar ishlashda qulayroq va ishonchli bo'lib, ancha katta kuchlarga (momentlarga) bardosh beradi va mexanizmlarning ulanishlarning yuqori nisbiy tezligida ishlashiga imkon beradi.
Mexanizmlarning asosiy turlari.
Mexanizm sifatida ko'rish mumkin maxsus holat kamida bitta bo'g'in rafga aylantirilgan kinematik zanjir va qolgan bo'g'inlarning harakati kirish bo'g'inlarining belgilangan harakati bilan belgilanadi.
Mexanizmni ifodalovchi kinematik zanjirning o'ziga xos xususiyatlari uning bo'g'inlarining tokchaga nisbatan harakatchanligi va aniqligidir.
Mexanizm bir nechta kirish va bitta chiqish bo'g'iniga ega bo'lishi mumkin, bu holda u yig'ish mexanizmi deb ataladi va aksincha, bitta kirish va bir nechta chiqish bo'g'inlari, keyin farqlash mexanizmi deb ataladi.
Mexanizmlar bo'linadiqo'llanmalar va uzatish.
uzatish mexanizmikirish va chiqish bo'g'inlarining harakatlari o'rtasidagi berilgan funktsional munosabatni takrorlash uchun mo'ljallangan qurilma deb ataladi.
hidoyat mexanizmiular faqat harakatlanuvchi zvenolar bilan kinematik juftlarni hosil qiluvchi zvenoning ma'lum bir nuqtasining traektoriyasi berilgan egri chiziqqa to'g'ri keladigan mexanizm deb ataladi.
Texnologiyada keng qo'llaniladigan mexanizmlarning asosiy turlarini ko'rib chiqing.
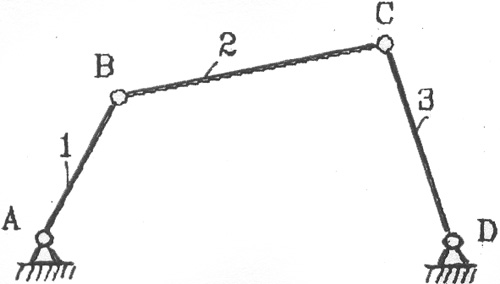
Bog'lanishlari faqat pastki kinematik juftlarni tashkil etuvchi mexanizmlar deyiladibo'g'imli tutqich. Bu mexanizmlar chidamliligi, ishonchliligi va ishlatish uchun qulayligi tufayli keng qo'llaniladi. Bunday Mexanizmlarning asosiy vakili bo'g'inli to'rt bo'g'indir (2.1-rasm).
Mexanizmlarning nomlari, odatda, ularning kirish va chiqish aloqalarining nomlari yoki ularning tarkibiga kiritilgan xarakterli bo'g'inlar bilan belgilanadi.
Kirish va chiqish bo'g'inlarining harakat qonunlariga ko'ra, bu mexanizmni krank-roker, qo'sh krank, qo'sh roker, roker-krank deb atash mumkin.
Bog'langan to'rt bo'g'in mashinasozlikda, asbobsozlikda, shuningdek, qishloq xo'jaligi, oziq-ovqat, qor tozalash va boshqa mashinalarda qo'llaniladi.

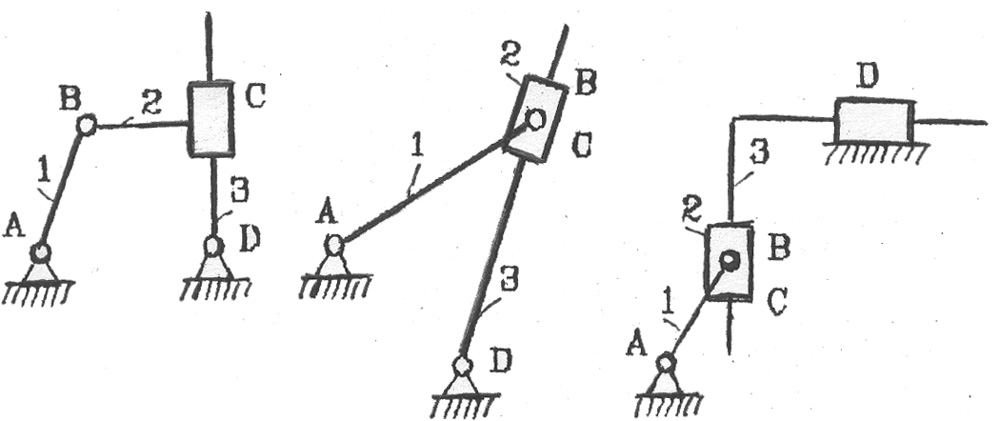
Agar aylanma juftlikni menteşeli to'rt bog'ichga almashtirsak, masalan D , tarjima qilish uchun, keyin biz taniqli krank-slayder mexanizmini olamiz (2.2-rasm).
Guruch. 2.2. Krank-slayder mexanizmlarining har xil turlari:
1 - krank 2 - birlashtiruvchi novda; 3 - slayder
Krank-slayder (slayder-krank) mexanizmi kompressorlar, nasoslar, ichki yonuv dvigatellari va boshqa mashinalarda keng qo'llanilishini topdi.
Menteşeli to'rt bog'ichda aylanma juftlikni almashtirish FROM translatsiyaga, biz roker mexanizmini olamiz (2.3-rasm).
p va c da .2.3, roker mexanizmida aylanma juftlarni almashtirish orqali menteşeli to'rt bo'g'indan olinadi. Qila olmoq progressiv uchun.
Roker mexanizmlari ish va ish qismlarining assimetriyasining o'ziga xos xususiyati tufayli planerlarda keng qo'llanilishini topdi. bo'sh harakat. Odatda ular to'sarning asl holatiga qaytishini ta'minlaydigan uzoq ish zarbasi va tez bo'sh zarbaga ega.
Guruch. 2.3. Har xil turdagi roker mexanizmlari:
1 - krank; 2 - tosh; 3 - sahna orqasi.
Menteşali dastagi mexanizmlari robototexnikada katta qo'llanilgan (2.4-rasm).
Ushbu mexanizmlarning o'ziga xosligi shundaki, ular mavjud katta raqam erkinlik darajalari, ya'ni ular ko'p disklarga ega. Kirish bo'g'inlari drayvlarining muvofiqlashtirilgan ishlashi tutqichning oqilona traektoriya bo'ylab va atrofdagi makonda ma'lum bir joyga harakatlanishini ta'minlaydi.
Muhandislik sohasida keng qo'llanilishikamera mexanizmlari. Kamera mexanizmlari yordamida bu qonunga muvofiq boshqariladigan bo'g'inning deyarli har qanday harakatini tizimli ravishda olishning eng oson usuli,
Hozirda mavjud katta raqam kamera mexanizmlarining navlari, ularning ba'zilari rasmda ko'rsatilgan. 2.5.

Kirish bo'g'iniga (kamera) tegishli shakl berish orqali kamera mexanizmining chiqish bo'g'inining zaruriy harakat qonuniga erishiladi. Kamera aylanishni amalga oshirishi mumkin (2.5-rasm, a, b ), tarjima (2.5-rasm, c, g ) yoki murakkab harakat. Chiqish rishtasi, agar u tarjima harakatini qilsa (2.5-rasm, a, in ), itaruvchi deb ataladi va agar silkitsa (2.5-rasm, G ) - roker. Yuqori kinematik juftlikda ishqalanish yo'qotishlarini kamaytirish uchun DA qo'shimcha bog'lovchi rolikdan foydalaning (2.5-rasm, G).
Shisha mexanizmlar ham ishlaydigan mashinalarda, ham har xil turdagi buyruq qurilmalarida qo'llaniladi.
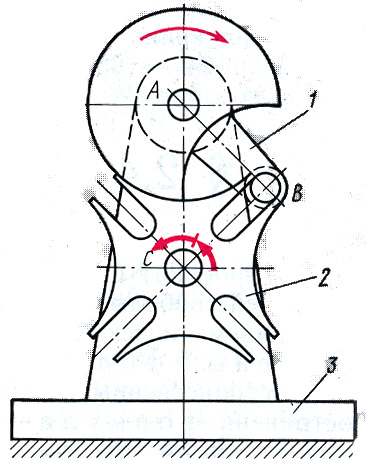
Ko'pincha, metall kesish dastgohlarida, presslarda, turli xil asboblar va o'lchash asboblarida vintli mexanizmlar qo'llaniladi, ularning eng oddiylari rasmda ko'rsatilgan. 2.6:
Guruch. 2.6 Vida mexanizmi:
1 - vint; 2 - yong'oq; A, B, C - kinematik juftliklar
Vida mexanizmlari, odatda, aylanish harakatini o'zaro bog'liq bo'lgan tarjima harakatiga yoki aksincha aylantirish zarur bo'lganda qo'llaniladi. Harakatlarning o'zaro bog'liqligi vintlar juftligining geometrik parametrlarini to'g'ri tanlash bilan o'rnatiladi DA .
Takoz mexanizmlari (2.7-rasm) da qo'llaniladi turli xil cheklangan kirish kuchlari bilan katta chiqish quvvatini yaratish talab qilinadigan siqish moslamalari va moslamalari. Ushbu mexanizmlarning o'ziga xos xususiyati dizaynning soddaligi va ishonchliligi.
Ishqalanish kuchlari hisobiga aloqa qiluvchi jismlar orasidagi harakatning uzatilishi amalga oshiriladigan mexanizmlar ishqalanish deyiladi. Eng oddiy uch bo'g'inli ishqalanish mexanizmlari rasmda ko'rsatilgan. 2.8

Guruch. 2.7 Takoz mexanizmi:
1, 2 - havolalar; L, V, C - kinematik bayramlar.

Guruch. 2.8 Ishqalanish mexanizmlari:
a - parallel o'qlar bilan ishqalanish mexanizmi; b - kesishgan o'qlar bilan ishqalanish mexanizmi; ichida - tirgak va pinion ishqalanish mexanizmi; 1 - kirish roligi (g'ildirak);
2 - chiqish roligi (g'ildirak); 2" - temir yo'l
Havolalar mavjudligi sababli 1 va 2 bir-biriga bog'langan holda, ular orasidagi aloqa chizig'i bo'ylab ishqalanish kuchi paydo bo'lib, u bilan birga boshqariladigan aloqani tortadi. 2 .
Ishqalanish mexanizmlari qurilmalarda, lenta uzatgichlarda, variatorlarda (tezlikni silliq boshqaruvchi mexanizmlarda) keng qo'llaniladi.
O'tkazish uchun aylanish harakati ma'lum bir qonunga ko'ra, parallel, kesishgan va kesishgan o'qlari bo'lgan vallar o'rtasida har xil turdagi viteslar qo'llaniladi. mexanizmlar . Tishli viteslar yordamida ikkala vallar orasidagi harakatni uzatish mumkinqattiq akslar, shuning uchun bilan kosmosda harakatlanish.
Tishli mexanizmlar chiqish bo'g'inining aylanish chastotasi va yo'nalishini o'zgartirish, harakatlarni yig'ish yoki ajratish uchun ishlatiladi.

Shaklda. 2.9 da qo'zg'almas o'qlari bo'lgan viteslarning asosiy vakillari ko'rsatilgan.
2.9-rasm. Ruxsat etilgan o'qli tishli uzatmalar:
a - silindrsimon; b - konusning shakli; oxirida; g - raf;
1 - tishli; 2 - vites; 2 * temir yo'l
Ikki to'rli vitesning kichikrog'i deyiladi jihozlar va boshqalar - tishli g'ildirak.
Rak - bu egrilik radiusi cheksizlikka teng bo'lgan tishli g'ildirakning maxsus holati.

Agar tishli poezdda harakatlanuvchi o'qlari bo'lgan viteslar bo'lsa, ular sayyora deb ataladi (2.10-rasm):
Biroq, sayyora tishli uzatmalar, sobit o'qli uzatmalar bilan solishtirganda, kichikroq viteslar bilan katta quvvat va tishli nisbatlarini uzatish imkonini beradi. Ular jamlovchi va differensial mexanizmlarni yaratishda ham keng foydalaniladi.
Kesishuvchi o'qlar orasidagi harakatlarning uzatilishi chuvalchangli uzatma yordamida amalga oshiriladi (2.11-rasm).

Vint-gayka uzatmasidan chuvalchangli uzatma gaykani uzunlamasına kesib, o'zaro perpendikulyar tekisliklarda ikki marta buklash orqali olinadi. Chuvalchangli uzatmalar o'z-o'zidan tormozlanish xususiyatiga ega va bir bosqichda katta vites nisbatlarini amalga oshirishga imkon beradi.
Guruch. 2.11. Chuvalchangli mexanizm:
1 - qurt, 2 - qurt g'ildiragi.
Intervalgacha harakatlanuvchi mexanizmlar, shuningdek, Malta xoch mexanizmini ham o'z ichiga oladi. Shaklda. Z-L "2. to'rt pichoqli "Malta xochi" mexanizmini ko'rsatadi.
"Malta xochi" mexanizmi etakchi tekis - 1-krankning doimiy aylanishini chiroq bilan aylantiradi. 3 "xoch" ning intervalgacha aylanishiga 2, chiroq 3 zarbasiz "xoch" ning radial yiviga kiradi 2 va uni burchakka buradi z - oluklar soni.
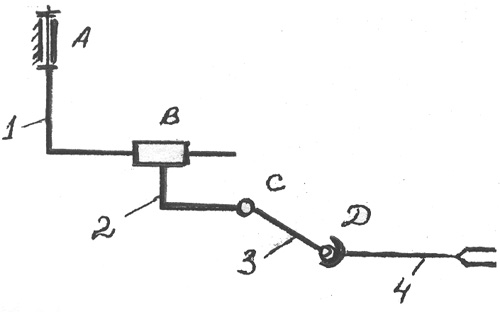
Harakatni faqat bitta yo'nalishda amalga oshirish uchun ratchet mexanizmlari qo'llaniladi. 2.13-rasmda tirgak mexanizmi ko'rsatilgan bo'lib, u qo'ltiq 1, g'ildirak 3 va panjalar 3 va 4 dan iborat.

Rokerni silkitganda 1 silkituvchi it 3 mandal g'ildiragiga aylanishni beradi 2 faqat rocker qo'lini soat sohasi farqli ravishda harakatlantirganda. G'ildirakni ushlab turish uchun 2 roker soatga qarshi harakat qilganda o'z-o'zidan soat yo'nalishi bo'yicha aylanishdan qulflash panjasi ishlatiladi 4 .
Malta va ratchet mexanizmlari dastgohlar va asboblarda keng qo'llaniladi,
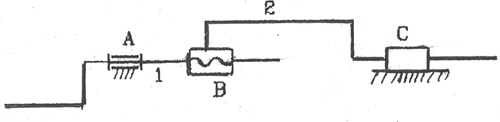
Nisbatan o'tkazish kerak bo'lsa uzoq masofa kosmosning bir nuqtasidan ikkinchisiga mexanik energiya, keyin moslashuvchan bog'lanishli mexanizmlar qo'llaniladi.
Kamarlar, arqonlar, zanjirlar, iplar, lentalar, to'plar va boshqalar harakatni bir tekisdan ikkinchisiga o'tkazadigan moslashuvchan bog'lanish sifatida ishlatiladi;
Shaklda. 2.14 moslashuvchan aloqa bilan eng oddiy mexanizmning blok diagrammasini ko'rsatadi.
Moslashuvchan bo'g'inli tishli uzatmalar mashinasozlik, asbobsozlik va boshqa sohalarda keng qo'llaniladi.
Eng tipik oddiy mexanizmlar yuqorida ko'rib chiqilgan. mexanizmlar, shuningdek, maxsus Adabiyotlarda, pa-sertifikatlarda va ma'lumotnomalarda, masalan, kabilar berilgan.
Mexanizmlarning strukturaviy formulalari.
Erkinlik darajalari soni bilan bog'liq bo'lgan turli mexanizmlarning tuzilishida (tuzilmasida) umumiy qonuniyatlar mavjud. V bog'lanishlar soni va uning kinematik juftlarining soni va turi bilan mexanizm. Bu naqshlar mexanizmlarning strukturaviy formulalari deb ataladi.
Fazoviy mexanizmlar uchun hozirgi vaqtda Malyshev formulasi eng keng tarqalgan bo'lib, uning kelib chiqishi quyidagicha.
bilan mexanizmga ruxsat bering m rishtalar (shu jumladan, raf), - bir, ikki, uch, to'rt va beshta harakatlanuvchi juftliklar soni. Keling, harakatlanuvchi havolalar sonini belgilaylik. Agar barcha harakatlanuvchi havolalar bo'lsa erkin jismlar, umumiy soni erkinlik darajasi 6 bo'ladi n . Biroq, har bir bitta harakatlanuvchi juftlik V sinf juftlikni tashkil etuvchi zvenolarning nisbiy harakatiga 5 ta bog'lanishni, har ikki harakatlanuvchi juftlikni yuklaydi. IV sinf - 4 obligatsiyalar va boshqalar. Shuning uchun oltiga teng erkinlik darajalarining umumiy soni miqdorga kamayadi.
kinematik juftlikning harakatchanligi qayerda, harakatchanligi teng bo'lgan juftliklar soni i . Ustlangan ulanishlarning umumiy soni ma'lum bir sonni o'z ichiga olishi mumkin q mexanizmning harakatchanligini kamaytirmasdan boshqa ulanishlarni takrorlaydigan, lekin uni faqat statik jihatdan noaniq tizimga aylantiradigan ortiqcha (takroriy) ulanishlar. Shuning uchun fazoviy mexanizmning erkinlik darajalari soni, uning harakatlanuvchi kinematik zanjirining tokchaga nisbatan erkinlik darajalari soni quyidagi Malyshev formulasi bilan aniqlanadi:
yoki qisqacha
(2.2)
da , mexanizm statik jihatdan aniqlangan sistema, da , statik jihatdan noaniq tizim.
Umumiy holatda (2.2) tenglamaning yechimi noma'lum bo'lgani uchun qiyin masala W va q ; mavjud echimlar murakkab va bu ma'ruzada ko'rib chiqilmaydi. Biroq, muayyan holatda, agar V , geometrik mulohazalardan topilgan mexanizmning umumlashtirilgan koordinatalari soniga teng, bu formuladan ortiqcha ulanishlar sonini topishingiz mumkin (Qarang: Reshetov L. N. Ratsional mexanizmlarni loyihalash. M.., 1972)
(2.3)
va mexanizmning statik aniqlanishi masalasini hal qilish; yoki mexanizm statik jihatdan aniqlanganligini bilib, toping (yoki tekshiring) V.
Shuni ta'kidlash kerakki, strukturaviy formulalar bo'g'inlarning o'lchamlarini o'z ichiga olmaydi, shuning uchun mexanizmlarni tizimli tahlil qilishda ularni har qanday (ma'lum chegaralar ichida) deb hisoblash mumkin. Agar ortiqcha ulanishlar bo'lmasa (), mexanizmni yig'ish havolalarni deformatsiya qilmasdan sodir bo'ladi, ikkinchisi o'z-o'zidan sozlanganga o'xshaydi; shuning uchun bunday mexanizmlar o'z-o'zini tekislash deb ataladi. Agar ortiqcha ulanishlar mavjud bo'lsa (), unda mexanizmni yig'ish va uning bo'g'inlarini harakatlantirish faqat ikkinchisi deformatsiyalanganda mumkin bo'ladi.
Ortiqcha havolalarsiz tekis mexanizmlar uchun strukturaviy formula P. L. Chebyshev nomi bilan atalgan, u birinchi marta 1869 yilda aylanish juftlari va bir darajadagi erkinlik bilan tutqichli mexanizmlar uchun taklif qilgan. Hozirgi vaqtda Chebishev formulasi har qanday tekis mexanizmlar uchun kengaytirilgan va ortiqcha cheklovlarni hisobga olgan holda quyidagi tarzda olingan.
M bo'g'inli tekis mexanizmga ruxsat bering (shu jumladan tokcha), - harakatlanuvchi bo'g'inlar soni, - pastki juftliklar soni va - yuqori juftliklar soni. Agar barcha harakatlanuvchi zvenolar tekis harakat qiladigan erkin jismlar bo'lsa, umumiy erkinlik darajalari soni 3 ga teng bo'lar edi. n . Biroq, har bir pastki juft juftlikni tashkil etuvchi zvenolarning nisbiy harakatiga ikkita bog'lanishni o'rnatadi, bunda bir daraja erkinlik qoladi va har bir yuqori juftlik bittadan bog'lanishni o'rnatadi va 2 daraja erkinlik qoldiradi.
Ustiga qo'yilgan bog'lanishlar soni ma'lum miqdordagi ortiqcha (takroriy) bog'lanishlarni o'z ichiga olishi mumkin, ularning yo'q qilinishi mexanizmning harakatchanligini oshirmaydi. Shunday qilib, tekis mexanizmning erkinlik darajalari soni, ya'ni uning harakatlanuvchi kinematik zanjirining tokchaga nisbatan erkinlik darajalari soni quyidagi Chebishev formulasi bilan aniqlanadi:
(2.4)
Agar ma'lum bo'lsa, bu erdan siz ortiqcha ulanishlar sonini topishingiz mumkin
(2.5)
"p" indeksi haqiqatga ishora qiladi gaplashamiz ideal tekis mexanizm haqida, aniqrog'i, uning tekis sxemasi haqida, chunki ishlab chiqarishdagi noaniqliklar tufayli tekis mexanizm ma'lum darajada fazoviydir.
Formulalar (2.2)-(2.5) bo'yicha mavjud mexanizmlarning strukturaviy tahlili va yangi mexanizmlarning strukturaviy diagrammalarining sintezi amalga oshiriladi.
Strukturaviy tahlil va mexanizmlarning sintezi.
Ortiqcha ulanishlarning mashinalarning ishlashi va ishonchliligiga ta'siri.
Yuqorida aytib o'tilganidek, o'zboshimchalik bilan (ma'lum chegaralar ichida) bog'lanish o'lchamlari bilan ortiqcha havolalar () bo'lgan mexanizmni bog'lanish deformatsiyasisiz yig'ib bo'lmaydi. Shuning uchun bunday mexanizmlar ishlab chiqarishning aniqligini oshirishni talab qiladi, aks holda yig'ish jarayonida mexanizmning bo'g'inlari deformatsiyalanadi, bu esa kinematik juftliklar va bog'lanishlarning sezilarli qo'shimcha kuchlar bilan yuklanishiga olib keladi (asosiylardan tashqari) tashqi kuchlar, uzatish uchun mexanizm mo'ljallangan). Haddan tashqari bog'langan mexanizmni ishlab chiqarishda aniqlik etarli bo'lmaganda, kinematik juftliklarda ishqalanish sezilarli darajada oshishi va bo'g'inlarning tiqilib qolishiga olib kelishi mumkin, shuning uchun bu nuqtai nazardan mexanizmlarda ortiqcha bog'lanishlar istalmagan.
Mexanizmning kinematik zanjirlaridagi ortiqcha bo'g'inlarga kelsak, mashinalarni loyihalashda ularni to'liq yo'q qilish dizaynning murakkabligi yoki boshqa sabablarga ko'ra foydasiz bo'lib chiqsa, ularni yo'q qilish yoki minimal miqdorda qoldirish kerak. Umumiy holda, kerakli texnologik asbob-uskunalarning mavjudligi, ishlab chiqarish narxi, talab qilinadigan xizmat muddati va mashinaning ishonchliligini hisobga olgan holda optimal echim izlash kerak. Shuning uchun, bu har bir aniq holat uchun juda qiyin vazifadir.
Biz misollar yordamida mexanizmlarning kinematik zanjirlarida ortiqcha bog'lanishlarni aniqlash va yo'q qilish metodologiyasini ko'rib chiqamiz.
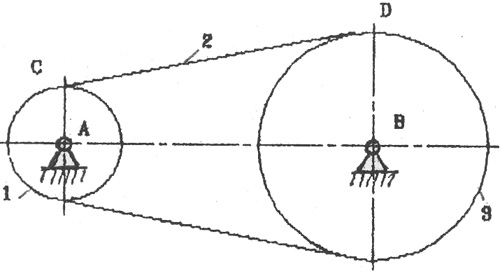
To'rtta bir harakatlanuvchi aylanish juftlari bo'lgan tekis to'rt bo'g'inli mexanizm bo'lsin (2.15-rasm, a ) ishlab chiqarishdagi noaniqliklar (masalan, o'qlarning parallel bo'lmaganligi sababli) A va D ) fazoviy bo'lib chiqdi. Kinematik zanjirlarni yig'ish 4, 3, 2 va alohida 4, 1 qiyinchiliklarga olib kelmaydi, balki ball beradi B, B' o'qiga joylashtirilishi mumkin X . Biroq, aylanish juftligini yig'ish uchun DA , havolalar orqali hosil qilingan 1 va 2 , u faqat koordinata tizimlarini birlashtirish orqali mumkin bo'ladi Bxyz va B 'x' y' z' , bu nuqtaning chiziqli siljishini (deformatsiyasini) talab qiladi B ' bog'lanish 2 x o'qi bo'ylab va zvenoning burchak deformatsiyalari 2 x va z o'qlari atrofida (strelkalar bilan ko'rsatilgan). Bu mexanizmda uchta ortiqcha bog'lanish mavjudligini bildiradi, bu (2.3) formula bilan ham tasdiqlanadi: . Ushbu fazoviy mexanizm statik jihatdan aniqlanishi uchun uning boshqa strukturaviy sxemasi kerak, masalan, rasmda ko'rsatilgan. 2.15, b , Bu erda bunday mexanizmni yig'ish nuqtalarni tekislashdan boshlab, mahkamlashsiz amalga oshiriladi B va B' nuqtani siljitish orqali mumkin bo'ladi FROM silindrsimon juftlikda.
Mexanizmning bir varianti mumkin (2.15-rasm, ichida ) ikkita sharsimon juftlik bilan (); Bu holda, bundan tashqariasosiy harakatchanlikmexanizmi paydo bo'ladimahalliy harakatchanlik- birlashtiruvchi novdani aylantirish qobiliyati 2 o'z o'qi atrofida quyosh ; bu harakatchanlik mexanizm harakatining asosiy qonuniga ta'sir qilmaydi va hatto menteşalarning eskirishini tekislash nuqtai nazaridan foydali bo'lishi mumkin: birlashtiruvchi novda 2 mexanizmning ishlashi vaqtida dinamik yuklar tufayli o'z o'qi atrofida aylanishi mumkin. Malyshev formulasi bunday mexanizm statik jihatdan aniqlanishini tasdiqlaydi:

Guruch. 2.15
Eng oddiy va samarali usul qurilmalar mexanizmlarida ortiqcha ulanishlarni yo'q qilish - ikkita pastki juftlik o'rniga nuqta aloqasi bilan yuqori juftlikdan foydalanish; Bu holda tekis mexanizmning harakatchanlik darajasi o'zgarmaydi, chunki Chebishev formulasiga ko'ra (at):
Shaklda. 2.16, a, b, c asta-sekin harakatlanuvchi rolikli itarish vositasi bilan shisha mexanizmidagi ortiqcha bo'g'inlarni yo'q qilish misoli keltirilgan. Mexanizm (2.16-rasm, a ) - to'rt bo'g'inli (); asosiy harakatchanlikdan tashqari (kameraning aylanishi 1
) mahalliy harakatchanlik mavjud (dumaloq silindrsimon rulonning mustaqil aylanishi 3
o'z o'qi atrofida) Natijada, . Yassi sxemada ortiqcha ulanishlar yo'q (mexanizm aralashmasdan yig'iladi). Agar ishlab chiqarishdagi noaniqliklar tufayli mexanizm fazoviy deb hisoblansa, u holda rulonning chiziqli aloqasi bilan 3 kamera 1 bilan da Malyshev formulasiga ko'ra, biz olamiz, lekin ma'lum bir shartda. Kinematik juft silindr - silindr (2.16-rasm, 6
) bog'lanishlarning nisbiy aylanishi mumkin bo'lmaganda z o'qi atrofida 1 , 3 uch tomonlama juftlik bo'ladi. Agar ishlab chiqarishdagi noaniqliklar tufayli bunday aylanish sodir bo'lsa, lekin kichik bo'lsa va chiziqli aloqa amalda saqlanib qolsa (yuklash ostida kontakt yamoq shakli to'rtburchakka yaqin bo'lsa), unda bu 
kinematik juftlik to'rtta harakatlanuvchi bo'ladi, shuning uchun va
2.17-rasm
Barrel shaklidagi rolik yordamida eng yuqori juftlik sinfini kamaytirish (nuqta aloqasi bilan beshta harakatlanuvchi juftlik, 2.16-rasm, ichida ), uchun va - mexanizmi statik jihatdan aniqlanganligini olamiz. Biroq, shuni esda tutish kerakki, ulanishlarning chiziqli aloqasi, garchi u ishlab chiqarishning yuqori aniqligini talab qilsa-da, nuqta kontaktiga qaraganda ko'proq yuklarni o'tkazishga imkon beradi.
2.16-rasmda d, e to'rt bo'g'inli uzatmadagi ortiqcha ulanishlarni yo'q qilishga yana bir misol (, g'ildiraklar tishlarining aloqasi) 1, 2 va 2, 3 - chiziqli). Bunday holda, Chebyshev formulasiga ko'ra, - tekis sxemada ortiqcha ulanishlar yo'q; Malyshev formulasiga ko'ra, mexanizm statik jihatdan noaniq, shuning uchun yuqori ishlab chiqarish aniqligi, xususan, barcha uchta g'ildirakning geometrik o'qlarining parallelligini ta'minlash uchun talab qilinadi.
Bo'sh tishlarni almashtirish 2 barrel shaklida (2.16-rasm, d ), biz statik aniqlanuvchi mexanizmni olamiz.
Kinematik juftlik aloqa shartlariga ko'ra ularning nisbiy harakatiga cheklovlar qo'yadigan ikkita qattiq bo'g'inning harakatlanuvchi konjugasiyasi. Bog'lanish shartlarining har biri bir darajadagi erkinlikni yo'q qiladi ,
ya'ni fazoda 6 ta mustaqil nisbiy harakatdan birining imkoniyati. To'rtburchaklar koordinatalar tizimida 3 ta mumkin tarjima harakatlari(3 ta koordinata o'qi yo'nalishi bo'yicha) va 3 ta aylanish (bu o'qlar atrofida). Aloqa shartlari soniga ko'ra S K. p.lar 5 ta sinfga boʻlingan. Erkinlik darajalari soni K. p. W=6-S. Har bir sinf doirasida K. buyumlari boʻgʻinlarning qolgan mumkin boʻlgan nisbiy harakatlariga koʻra turlarga boʻlinadi. Bog'lanishlarning aloqa tabiatiga ko'ra, pastki K. p.lar - sirt bo'ylab aloqa bilan va yuqoriroq - chiziqlar bo'ylab yoki nuqtalarda aloqa bilan ajralib turadi. Yuqori K. ashyolari barcha 5 sinf va koʻp turlar uchun mumkin; pastki - faqat 3 sinf va 6 tur ( 1-rasm
). Geometrik jihatdan yopiq va yopiq bo'lmagan C.P o'rtasida ham farqlanadi. guruch. bitta
), ikkinchidan, yopish uchun bosim kuchi kerak, deb ataladi. kuch bilan yopish (masalan, kamera mexanizmida). An'anaviy ravishda bir nechta oraliq prokat elementlari (masalan, sharli va rulmanli podshipniklar) va oraliq deformatsiyalanuvchi elementlari (masalan, tekis prujinali qurilmalarning orqa tebranishsiz menteşalari deb ataladigan) bilan harakatlanuvchi muftalar k deb ataladi. guruch. 2
). N. Ya. Niberg.
Katta Sovet ensiklopediyasi. - M.: Sovet Entsiklopediyasi. 1969-1978 .
Boshqa lug'atlarda "Kinematik juftlik" nima ekanligini ko'ring:
Mexanizmning 2 ta bo'g'inining ulanishi, ularning nisbiy harakatlanishiga imkon beradi. Bog'lanishlar sirtga tegib turadigan kinematik juftlik pastki deb ataladi (masalan, aylanma menteşe, translatsiya slayderi va yo'riqnoma). Kinematik juftlik, ...... Katta ensiklopedik lug'at
kinematik juftlik- juftlik Ikki qo'shni bo'g'inning ulanishi, ularning nisbiy harakatlanishiga imkon beradi. [Tavsiya etilgan shartlar toʻplami. 99-son. Mexanizmlar va mashinalar nazariyasi. SSSR Fanlar akademiyasi. Ilmiy-texnik terminologiya qo'mitasi. 1984] Mavzular nazariyasi ...... Texnik tarjimon uchun qo'llanma- kinematinė pora statusas T sritis fizika atitikmenys: angl. kinematik juftlik vok. kinematisches Elementenpaar, n rus. kinematik juftlik, f pranc. paaire cinématique, f … Fizikos terminų žodynas
Ikki qo'shni bog'lanishning ulanishi, ularni bog'lash imkonini beradi. tirbandlik. Bog'lanish boshqa havola bilan aloqa qilishi mumkin bo'lgan yuzalar, chiziqlar, nuqtalar deyiladi. ulanish elementlari. K. p. pastki (kontakt yuzalar) va yuqori ... ... bo'linadi. Katta ensiklopedik politexnika lug'ati
kinematik juftlik- kinematik juftlik Mexanizmning ikkita qattiq tanasining ulanishi, ularning berilgan nisbiy harakatini ta'minlaydi. Kod IFToMM: 1.2.3 Bo'lim: MEXANIZMLAR VA MOSHINALAR NAZARIYASI HAQIDA UMUMIY TUSHUNCHALAR ... Mexanizmlar va mashinalar nazariyasi
juft- kinematik juftlik; juft Ikki qoʻshni boʻgʻinning ulanishi, ulardan nisbiy harakatlanish imkonini beradi. juft kuchlar; juftlik tizimi ikkinchi parallel kuchlar, mutlaq qiymatda teng va qarama-qarshi yo'nalishda yo'naltirilgan ...
yuqori juftlik- Kinematik juftlik, unda bog'lanishlarning kerakli nisbiy harakatini faqat uning elementlariga chiziqlar bo'ylab va nuqtalarda tegizish orqali olish mumkin ... Politexnik terminologik izohli lug'at





