Ma'ruzalar. Test: Mexanizmlarning kinematik tahlili
2. MEXANIZMLARNING KINEMATIK TAHLILI
2.1. Kinematik tahlilning maqsad va vazifalari
Mexanizm sintezi- dizayn - nazariy xarakterdagi jiddiy qiyinchiliklarga ega, shuning uchun amaliy muhandislik vazifalarini bajarishda tahlildan ko'ra kamroq tarqalgan.
Mexanizmni tahlil qilish- o'zgarish qonuniyatlarini o'rganish maqsadida uning asosiy parametrlarini o'rganish va shu asosda bir qator ma'lum mexanizmlardan eng yaxshisini tanlash. Sintez bilan solishtirganda, mexanizm tahlili amaliyotda keng qo'llaniladi.
Maqsadlar:
Bog'lanishlarning kinematik xususiyatlarini aniqlash: siljish; tezlik; tezlashtirish; harakat traektoriyasi; kirish (etakchi) bo'g'inlar harakatining ma'lum qonunlari bilan pozitsiya funktsiyasi.
Ishchi (chiqish) zvenosi ishining kinematik sharoitlarini baholash.
Mexanizmning quvvat, dinamik, energiya va boshqa hisob-kitoblarini amalga oshirish uchun kerakli raqamli ma'lumotlarni aniqlash.
Vazifalar:
mexanizm bo'g'inlarining pozitsiyalari haqida. Nuqtalarning harakat traektoriyalarini aniqlash;
bog'lanish tezligi yoki mexanizmning alohida nuqtalari haqida;
bog'lanishlarning tezlashishi yoki mexanizmning alohida nuqtalari haqida.
Usullari:
grafik (yoki grafik va diagrammalar usuli);
grafik-analitik (yoki tezlik va tezlashtirish rejalari usuli);
analitik;
eksperimental.
Mexanizmning kinematik tahlili quyidagi tartibda amalga oshiriladi: birinchi navbatda, dastlabki bo'g'inlarning harakati tekshiriladi, so'ngra mexanizmni shakllantirish jarayonida ularni biriktirish tartibida alohida strukturaviy guruhlarning tahlili amalga oshiriladi. Bunday holda, har bir strukturaviy guruhda ushbu guruh biriktirilgan elementlarning pozitsiyalari, tezligi va tezlanishlari ma'lum bo'ladi. Har bir Assur guruhining kinematik tahlili guruhning ichki juftlarining kinematik parametrlarini aniqlashdan boshlanishi kerak. Keyin guruhning qolgan nuqtalarining parametrlari va uning bog'lanishlarining burchak tezliklari va tezlanishlari aniqlanadi.
Assur guruhlarining har bir sinfi kinematik tahlilning o'ziga xos usuliga mos keladi.
Binobarin, mexanizmning kinematik tahlillari faqat ishlagandan keyin boshlanishi kerak strukturaviy tahlil, buning asosida Assur guruhlariga qo'shilish tartibi o'rnatiladi.
Shuningdek, kinematik tahlilni o'tkazishdan oldin, shartga rioya qilishga e'tibor berish kerak aylanuvchi havolalar kinematik juftlikda. Bog'lanishlar o'lchamlarining ba'zi nisbatlari uchun ularning aylanishi geometrik sabablarga ko'ra mumkin emas. Quvvat omillari, shuningdek, bog'lamlarning burilishiga ta'sir qilishi mumkin.
Bog'larning tirqishliligi mexanizmning ishlashini belgilovchi asosiy omil hisoblanadi
2.2. Grafik kinematik tahlil usuli
Ushbu usulning afzalligi uning ravshanligi va soddaligidir. O'zaro harakatni amalga oshiradigan aloqalarni kinematik tahlil qilish uchun yaxshi. Usulning kamchiligi grafik konstruktsiyalarning aniqligiga bog'liq bo'lgan past aniqlikdir.
Joylashuv muammosi etakchi bo'g'inning turli xil ketma-ket pozitsiyalari bilan tanlangan uzunlik shkalasida mexanizmning bir nechta kombinatsiyalangan rejalarini qurish orqali hal qilinadi.
Tezlik bilan bog'liq muammolar va tezlashuvlar o‘rganilayotgan nuqtaning siljishlari, tezligi va tezlanishlarining grafiklarini (diagrammalarini) tuzish yo‘li bilan yechiladi.
Kinematik tahlil ketma-ketligi:
Birinchidan, mexanizmning bir nechta (ko'pincha 12 yoki undan ortiq) birlashtirilgan rejalari o'zboshimchalik bilan tanlangan uzunlik shkalasida qurilgan.
Keyin o'rganilayotgan nuqta yoki bo'g'inning yo'li (siljishi) grafigi quriladi, buning uchun mexanizmning birlashtirilgan rejalari va o'rganilayotgan nuqta yoki bo'g'inning ketma-ket pozitsiyalaridan foydalaniladi.
Ko'chirish grafigini grafik differensiallash orqali o'rganilayotgan nuqta tezligining grafigi tuziladi.
Tezlik grafigining grafik farqlanishi tezlanishlar grafigini tuzadi.
Grafik farqlash akkordlar usuli va tangenslar usuli bilan amalga oshirilishi mumkin. Aniqlikni oshirish uchun ikkala usulni bir vaqtning o'zida ishlatish qulay.
Agar mexanizmning dastlabki bo'g'inining harakati doimiy burchak tezligi bilan amalga oshirilsa, u holda burchak tezlanishi
 nolga teng.
nolga teng.
Dastlabki mexanizmning burchak tezligi bilan harakati ![]() va
va  mexanizmning doimiy yoki asosiy harakati deyiladi
.
mexanizmning doimiy yoki asosiy harakati deyiladi
.
Mexanizmning kinematik sxemasi qat'iy ravishda miqyosda qurilgan.
TMMdagi shkala omili SI birliklarida o'lchangan tabiiy qiymatning nisbati, ya'ni. mm bilan o'lchangan uni tasvirlaydigan segment uzunligiga m (metr) da.
Mexanizm rejasining masshtab koeffitsienti quyidagilar bilan belgilanadi:
 =
=
 - masshtab omili.
- masshtab omili.
 _ metrda o'lchangan haqiqiy bog'lanish uzunligi
_ metrda o'lchangan haqiqiy bog'lanish uzunligi
AB - chizmadagi bog'lanish uzunligi millimetrda
Bir necha erkinlik darajasiga ega mexanizmlar uchun boshlang'ich bo'g'in yoki boshlang'ich bo'g'inlarning ma'lum bir pozitsiyasiga mos keladigan mexanizmning kinematik diagrammasining tasviri mexanizm rejasi deb ataladi.
MISOL. Krank-slayder mexanizmining kinematik tahlilini o'tkazing
Mexanizmning kinematik tahlili grafik usulda amalga oshiriladi.
Buning uchun, agar dastlabki bog'lanish aylanish juftligiga kiritilgan bo'lsa, u burchaklar bilan aylantiriladi  boshqa barcha zvenolarning siljishlarini aniqlang.
boshqa barcha zvenolarning siljishlarini aniqlang.
Bog'lanishlarni joylashtirish uchun rejalarni qurish quyidagicha amalga oshiriladi.
Agar bo'g'inlarning harakatlarini yoki ularning tezligini aniqlash mexanizmning bir yoki bir nechta bo'g'inlari ishtirokisiz amalga oshirilishi mumkin bo'lsa, u holda bu bo'g'inlar passiv cheklovlar yoki qo'shimcha erkinlik darajalarini kiritadi.
Kinematik diagrammalarni qurish
Mexanizmlarni kinematik o'rganishda uni o'rganilayotgan mexanizm harakatining to'liq tsikli uchun bajarish kerak. Buning uchun mexanizmning bir-biriga juda yaqin joylashgan bir qator pozitsiyalari uchun tezliklar, tezlanishlar harakatining analitik yoki grafik tadqiqi amalga oshiriladi. Amaliy TMM vazifalarida har bir kinematik diagramma odatda bog'lanishning kinematik parametrlaridan birining o'zgarishining grafik tasviri bo'ladi: o'rganilayotgan mexanizmning bog'lanish nuqtasining joy almashishi, tezlashishi, tezligi yoki vaqt funktsiyasi sifatida. mexanizmning dastlabki bo'g'ini, ya'ni. umumlashgan koordinata vazifasida.
Misol sifatida, ABC krank-slayder mexanizmining "C" nuqtasining doimiy harakatlanishi uchun S C \u003d S C (t) kinematik diagrammalarini qurishni ko'rib chiqing, ya'ni krank doimiy burchak tezligida aylanganda.  .
.
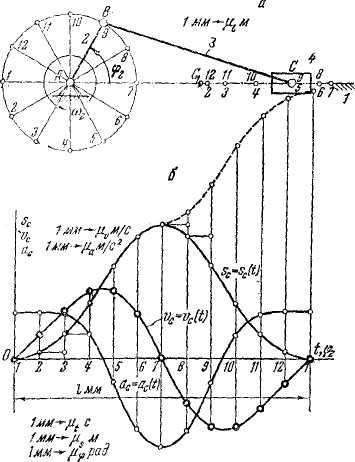
3.1-rasm. Krank-slayder
mexanizmi:
a) kinematik sxema;
c) bog'liqliklarni tasvirlaydigan grafiklar
S C =S C (t); - siljish diagrammasi
V c = V c (t); - tezlik jadvali
a c = a c (t); - tezlanish diagrammasi
Buning uchun biz B va C nuqtalarining yo'llarini belgilaymiz. Slayderning o'ta chap holatidan C nuqtaning siljishlarini xabar qilish qulay. Koordinata o'qlarini chizamiz va l MM segmentini x o'qi bo'yicha chizamiz, bu masshtabdir.  vaqt T bir to'liq burilish krank, ya'ni. T=
vaqt T bir to'liq burilish krank, ya'ni. T= 
bu erda: n - aylanish tezligi, daqiqada aylanish,
keyin 
Siqilish diagrammasini qurish
l segmenti 12 ta teng qismga bo'linadi va mos keladigan 1,2,3 va hokazo nuqtalarda biz slayderning eng chap C 1 pozitsiyasidan "C" nuqtasi bosib o'tgan masofani chetga surib qo'yamiz. Shunday qilib, 2 nuqtada biz y o'qiga parallel yo'nalishda C 1 C 2 segmentini chetga surib qo'yamiz; nuqta 3-segment C 1 C 3 va boshqalar.
Agar C 1, C 2, C 1 C 3 segmentlari to'g'ridan-to'g'ri diagrammadan chetga qo'yilgan bo'lsa (a-rasm), u holda
diagrammaning shkalasi S C =S C (t) y o'qi bo'ylab m i ga teng bo'ladi, ya'ni. masshtab
sxema qurilishi. C 7 pozitsiyasidan, C nuqtasi eng o'ng tomonni olganida
holatda, C7 pozitsiyasida chizilgan C1C7 ordinatasidan C7C8, C7C9 masofalari ayiriladi va shunday qilib, 2-tirsak dastlabki holatga kelganda pozitsiyadagi S C =SC (t) egri chiziq nolga teng ordinataga ega bo'ladi.
Olingan egri chiziq C nuqtaning ekstremaldan uzoqliklari egri chizig'idir
slayderning chap holati. Agar siz bosib o'tgan yo'llarning egri chizig'ini qurishingiz kerak bo'lsa
C nuqtasi, keyin C 7 pozitsiyasidan C 7 C 8, C 7 C 9 masofalari ilgari yotqizilgan C 1 C 7 segmentiga qo'shilishi kerak, rasmda. b) - yo'l egri chizig'ining bir qismi tire bilan ko'rsatilgan. Chunki krank doimiy burchak tezligida aylanadi  2, keyin biz abscissa o'qi vaqt emas deb taxmin qilishimiz mumkin t, va aylanish burchaklari ph 2 havola 2 , ya'ni. diagrammalar S C =S C (t) bir vaqtning o'zida diagrammalar S C =S C (ph 2) bo'ladi. Masshtab m ph \u003d 2p / l, bu erda l segmenti chizmadan mm dan olinishi kerak.
2, keyin biz abscissa o'qi vaqt emas deb taxmin qilishimiz mumkin t, va aylanish burchaklari ph 2 havola 2 , ya'ni. diagrammalar S C =S C (t) bir vaqtning o'zida diagrammalar S C =S C (ph 2) bo'ladi. Masshtab m ph \u003d 2p / l, bu erda l segmenti chizmadan mm dan olinishi kerak.
Tezliklar va tezlanishlar diagrammalarini usul bilan qurish
grafik farqlash
Bog'lanish siljishlarining kinematik diagrammasiga ega bo'lgan holda, grafik farqlash orqali tezlik diagrammasini olish mumkin. Tezlik diagrammasini tuzish ketma-ketligini ko'rib chiqing akkord usuli.
Siqilish diagrammasida biz akkordlarni chizamiz: oh, voy, va hokazo.
2. Tezlik diagrammasi uchun va o'qning davomi bo'yicha koordinata o'qlarini quramiz.
abscissa (ot) chapga, ichidagi qutb masofasini (OP V) chetga surib qo'ying
 = 30 - 60 mm.
= 30 - 60 mm.
3. P V qutbdan nurlarni chizamiz: 1, 2, 3, ... va hokazo akkordlarga parallel.
oh, voy, va hokazo. y o'qi bilan kesishgan nuqtaga: 1 ' , 2 ' , 3 ' , … nuqtalarida.
4. 1', 2', 3' nuqtalardan o'rtaga gorizontal chiziqlar torting.
mos keladigan vaqt oraliqlari (1 '' , 2 '' , 3 '' , ...).
5. Olingan nuqtalarni silliq egri chiziq bilan bog'laymiz.
6. Tezliklar masshtabini hisoblang.
Burchakli siljishlar diagrammasini farqlashda biz mos ravishda shkala bo'yicha burchak tezliklarining diagrammasini olamiz:
Tezlanishlar grafigini olish uchun tezliklar grafigini grafik differensiallashni amalga oshiramiz. Bunda:
 ;
;
Tezlik grafigini farqlashda nol (12) holatda tezlanish qiymatini aniqlashga e'tibor berish kerak.
Buning uchun akkorddan foydalaning (12 - 1), tezlik grafigini keyingi davrga davom ettiring.
vaqt shkalasi formuladan foydalanib hisoblash mumkin
 ,
,
qayerda T- krankning bir aylanish davri, s; L X- siljishlar grafigidagi (diagrammasi) 1 va 1 nuqtalar orasidagi segment uzunligi, mm.
Davrdan beri T formulalar yordamida hisoblash mumkin
 , yoki
, yoki  , bilan,
, bilan,
qayerda ω 1 krankning burchak tezligi, 1/s; n 1 krank aylanish chastotasi, rpm, keyin vaqt shkalasi
 , s/mm.
, s/mm.
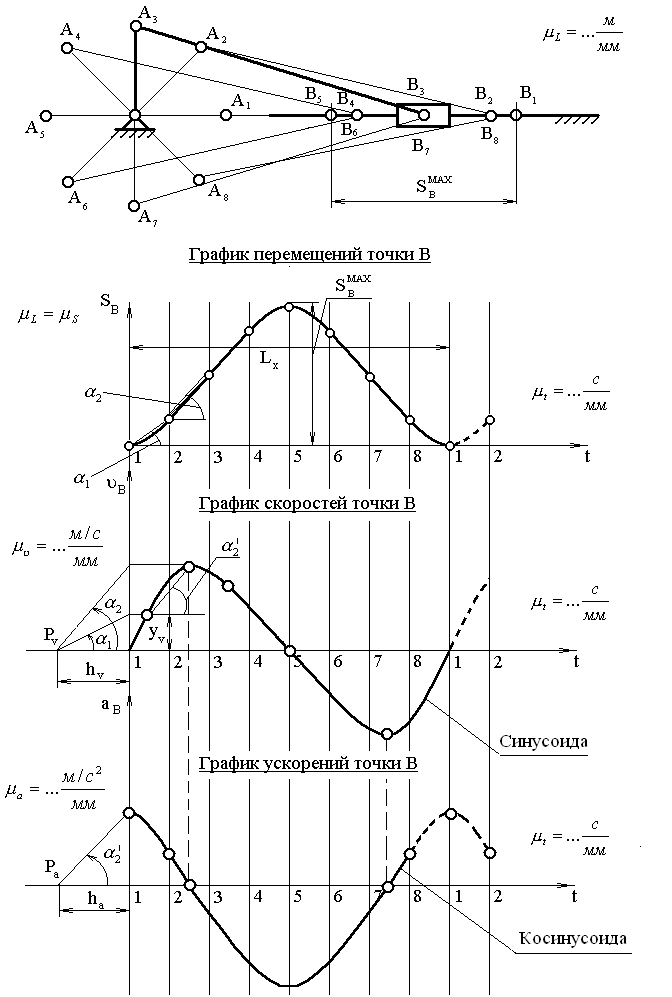 Guruch. 3.2. Mexanizmning birlashtirilgan rejalari,
Guruch. 3.2. Mexanizmning birlashtirilgan rejalari,
siljishlar, tezliklar va tezlanishlar grafiklari
3. Kinematik tahlilga misollar
3.1. Geometrik o'zgarmas tizimlarni shakllantirish qoidalari
Biz tizimning har qanday geometrik o'zgarmas qismi deb ataymiz disk.
1-qoida: tugun diskga bir xil to'g'ri chiziqda yotmaydigan ikkita zveno orqali biriktiriladi (3.1-rasm).
2-qoida: disk boshqa disk bilan bir nuqtada kesishmaydigan va bir-biriga parallel bo'lmagan uchta bo'g'in orqali ulanadi (3.2-rasm).
Ikki bog'lanishning kesishish nuqtasini menteşe deb hisoblash mumkin - haqiqiy yoki xayoliy. Shuning uchun 2-qoida menteşeli ikkita diskning ulanishi va menteşe orqali o'tmaydigan bir ulanish sifatida talqin qilinishi mumkin. Masalan, rasmda ko'rsatilgan ikkita disk. 3.3 haqiqiy ilgak A va zveno 3 bilan bog'langan. Bundan tashqari disklar o'ylab topilgan B ilgak va 1 rishta bilan bog'langan deb hisoblash mumkin.
3.1-rasm. Tugunni diskka ulash
3.2-rasm. Ikkita diskni uchta havola bilan ulash
3.3-rasm. Ikki diskni menteşe va novda bilan ulash:
A - haqiqiy menteşe; B - xayoliy menteşe
3-qoida: uchta disk bir-biriga bitta to'g'ri chiziqda yotmaydigan uchta ilgak bilan bog'langan (3.4-rasm). Menteşalar haqiqiy yoki qo'g'irchoq bo'lishi mumkin.
3.4-rasm. Uchta menteşeli uchta diskni ulash
Agar ushbu qoidalardan birortasi buzilgan bo'lsa, tizim geometrik o'zgaruvchan yoki bir zumda o'zgaruvchan bo'lib chiqadi.
Agar tizim sanab o'tilgan qoidalardan foydalangan holda tuzilgan bo'lsa, u geometrik jihatdan o'zgarmas bo'ladi.
Agar da kinematik tahlil geometrik o'zgarmas sistemada topiladin ortiqcha ulanishlar, keyin tizim bo'lib chiqadin marta statik jihatdan noaniq. Ortiqcha ulanishlar bo'lmasa, tizim statik jihatdan aniqlangan.
Ta'limi ushbu qoidalarga bo'ysunadigan tizimlar oddiy ta'lim tizimlari deb ataladi. Shakllanish tartibini yuqorida aytib o'tilgan qoidalar bilan aniqlab bo'lmaydigan tizimlar mavjud. Bunday tizimlarni kinematik tahlil qilish uchun boshqa usullar qo'llaniladi, masalan, ushbu qo'llanmada ko'rib chiqilmagan aloqalarni almashtirish usuli.
3.2. Tizimning erkinlik darajasi
Tizimning erkinlik darajasi V sistemaning fazodagi holatini belgilovchi mustaqil parametrlar soni.
Belgilang:
D tizim tuzilgan disklar soni;
V disklarni bir-biriga bog'laydigan oddiy menteşalar soni;
FROM disklarni bir-biri bilan bog'laydigan havolalar soni;
FROM O - disklarni erga ulaydigan qo'llab-quvvatlovchi havolalar soni.
Oddiy menteşe ikkita diskni birlashtiruvchi ilgak deb ataladi, bunday menteşe ikkita bog'lanishga teng. Agar menteşe ulansa d disklar deb ataladi bir nechta menteşe va uning ko'plik Kimga =d–1 qancha oddiy ilgakka teng ekanligini ko'rsatadi (3.5-rasm).
3.5-rasm. Oddiy ( a) va ko'paytmalar ( b, c) ilgaklar
O'zboshimchalik bilan tekis tizim uchun
W = 3D - 2Sh - S - S Oh, (1)
bundan tashqari, disklarda ortiqcha havolalar bo'lmasligi kerak.
Menteşeli trusslar uchun erkinlik darajasini oddiyroq formula bilan aniqlash mumkin
W \u003d 2U - C - C Oh (2)
qayerda Da– xo‘jalik tugunlari soni; FROM- truss rodlari soni; FROM O - qo'llab-quvvatlash havolalari soni.
Agar a V >
Agar a V
Agar a V< 0, то система геометрически неизменяемая и статически неопределимая.
Geometrik o'zgarmaslik shartlarini bilish muhimdir V= 0 vaV<0 являются необходимыми, но недостаточными. Для окончательного вывода о виде системы следует анализировать порядок образования системы (см. примеры ниже).
1-misol Nurning kinematik tahlili (3.6-rasm, a).
Nur quyidagi ketma-ketlikda yig'iladi:
1-bosqich. 1-disk (ABC novdasi) yerga, xuddi disk kabi, uchta bo'g'in yordamida biriktirilgan (2-qoida, 3.6-rasm). b).
3.6-rasm. Nurlarni yig'ish ketma-ketligi
2-bosqich. Disk 2 (rodCDE ) menteşe C va bir nuqtada qo'llab-quvvatlash ulanishi yordamidaD (2-qoida varianti, 3.6-rasm, ichida).
3-bosqich. Disk 3 (rodEF ) ilgak bilanE va bir nuqtada mos yozuvlar ulanishiF (2-qoida varianti, 3.6-rasm, G). Bu nurni yig'ishni yakunlaydi.
Nur hosil bo'lgandan beri (3.6-rasm, a) belgilangan qoidalarga bo'ysunadi va qo'shimcha (ortiqcha) bog'lanishlar topilmaydi, keyin berilgan tizim geometrik o'zgarmas va statik aniqlangan (GN SS ).
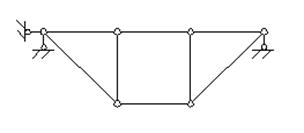
2-misol Fermaning kinematik tahlili (3.7-rasm, a).
Ferma quyidagi ketma-ketlikda yig'iladi:
1-bosqich. Uchta tayoq (1-2, 2-4, 1-4), uchta disk kabi, 3-qoidaga muvofiq uchta ilgak (1, 2, 4) bilan bog'langan.
2-bosqich. 3-tugun shakllangan Disk 1 (1-2-4) ga 1-qoidaga muvofiq 1-3 va 4-3 tayoqchalar yordamida biriktiriladi.
3-bosqich. 6-tugun hosil bo'lgan Disk 2 (1-2-4-3) ga 1-qoidaga muvofiq 4-6 va 3-6 tayoqchalar yordamida biriktiriladi.
4-bosqich. 5-tugun 1-qoidaga muvofiq 3-5 va 6-5 tayoqchalar yordamida hosil bo'lgan Disk 3ga biriktiriladi.
5-bosqich. Olingan truss 2-qoidaga muvofiq uchta qo'llab-quvvatlovchi bog'ichlar bilan erga biriktiriladi.
3.7-rasm. Fermer xo'jaligini yig'ish ketma-ketligi: a- fermer xo'jaligi; b- yig'ish bosqichlari
Fermer xo'jaligi tashkil etilgandan beri (3.7-rasm, a) belgilangan qoidalarga bo'ysunadi va qo'shimcha (ortiqcha) novdalar aniqlanmaydi, keyin berilgan tizim geometrik jihatdan o'zgarmas va statik jihatdan aniqlangan (GN SS ).
Fermer xo'jaligi boshqa ketma-ketlikda yig'ilishi mumkin, ammo har qanday holatda ham chiqish bir xil bo'ladi.
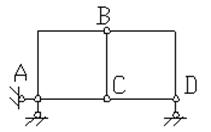
3-misol Kadrning kinematik tahlili (3.8-rasm, a).
Ramka quyidagi ketma-ketlikda yig'iladi:
1-bosqich. Rod AB erga (3.8-rasm, b dagi 1-disk) qattiq qisqich yordamida biriktiriladi, bu uchta bog'lanishga teng (2-qoida).
3.8-rasm. Ramkalarni yig'ish ketma-ketligi
2-bosqich. Disk 2 (rod BCD) shakllangan “Earth + Disk 1” tizimiga B ilgak va C nuqtadagi ikkita zveno yordamida biriktirilgan (3.8-rasm, ichida).
2-qoidaga ko'ra, C nuqtasida bitta ulanishga ega bo'lish kifoya, shuning uchun ikkinchi ulanish ortiqcha.
3-bosqich. Disk 3 hosil bo'lgan "Earth + Disk 1 + Disk 2" tizimiga biriktirilgan (2.8-rasmdagi rod DE, G) menteşe D bilan va E nuqtasida tayanch tayog'i (2-qoida).
Ramka hosil bo'lgandan beri (3.8-rasm, a) belgilangan qoidalarga bo'ysunadi va bitta ortiqcha bog'lanish aniqlanadi, keyin berilgan tizim geometrik o'zgarmas va bir marta statik jihatdan noaniq (GN SN).
4-misol Fermaning kinematik tahlili (3.9-rasm, a).
Ferma shu ketma-ketlikda yig'iladi.
1-bosqich. Uchta novdadan (1-2, 2-4, 1-4) disk hosil bo'ladi - uchburchak 1-2-4 (3-qoida), unga 3-tugun (1-qoida) 1-3 va 4-rodlar bilan biriktirilgan. -3. Olingan disk 1-2-4-3 uchta qo'llab-quvvatlash bo'g'ini (2-qoida) orqali erga ulangan bo'lib, Disk 1 ni tashkil qiladi (3.9-rasm, b).
2-bosqich. Uchta tayoq (5-6, 6-7, 5-7) 3-qoidaga muvofiq 2-diskni hosil qiladi (3.9-rasm, ichida).
3-bosqich. Disk 2 1-diskga uchta havola (4-6, 3-5, 7-8) orqali ulangan, ammo bu barcha havolalar bir nuqtada kesishganligi sababli 2-qoida buziladi. 1-disk va 2-diskning 7-tugunga nisbatan cheksiz kichik burchakka o'zaro aylanishi mumkin.
3.9-rasm. Fermer xo'jaligini yig'ish ketma-ketligi
2-qoida buzilganligi sababli, berilgan tizim bir zumda o'zgarib turadi va strukturaning dizayn sxemasi bo'lib xizmat qila olmaydi.
5-misol Nurning erkinlik darajasini toping (3.6-rasmga qarang, a).
Nur uchta diskdan (tayoqlardan) iboratAC,Idoralar,EF , ikkita oddiy menteşe C va E bilan o'zaro bog'langan va erga beshta qo'llab-quvvatlash aloqasi bilan biriktirilgan. Shunung uchun D = 3,V = 2, FROM = 0, FROM O = 5 va formula (1) bo'yicha olamizV = 3 3 - 2 2 - 0 - 5 = 9 - 9 = 0, bu geometrik jihatdan o'zgarmas va statik aniqlangan tizimning zaruriy belgisidir. Bu xulosa 1-misolda tasdiqlangan.
6-misol Fermer xo'jaligining erkinlik darajasini toping (3.7-rasmga qarang, a).
Biz formuladan (1) foydalanamiz va har bir truss novdasini disk sifatida ko'rib chiqamiz, ya'ni. D= 9. Menteşalar 2 va 5 har biri ikkita truss novdasini bog'laydi, shuning uchun ular oddiy. Menteşalar 1 va 6 har biri uchta truss novdasini bog'laydi, shuning uchun ular ikki barobar. Menteşa 3 va 4 uchli. Oddiy ilgaklarning umumiy soni V = 2 1 + 2 2 + 2 3 =12. Uchta qo'llab-quvvatlash havolasi mavjud.
olamiz V= 3 9 - 2 12 - 3 = 27 - 27 = 0.
FROM = 9, Da= 6, FROM O = 3.
olamiz V\u003d 2 6 - 9 - 3 \u003d 12 - 12 \u003d 0.
Ushbu misol (2) formulaning (1) formuladan ustunligini ko'rsatadi. Tizimning GN CO belgisi 2-misolda tasdiqlangan.
7-misol Ramkaning erkinlik darajasini toping (3.8-rasmga qarang, a).
Ramka uchta diskdan iboratAB,BCD vaDE bir-biriga ikkita oddiy menteşe bilan bog'langanB vaD. Ramka erga oltita tayanch tirgak bilan biriktirilgan (uchta qattiq biriktirma A, ikkitasi C tayanchi, bittasi E). Shunung uchun D= 3, V = 2, FROM= 0, FROM O = 6 va formula (1) bo'yicha olamiz
V= 3 3 – 2 2 – 0 – 6 = –1, bu tizimning SN GN ning zaruriy belgisidir. Bu xulosa 3-misolda tasdiqlangan.
Misol 8. Fermer xo'jaligining erkinlik darajasini toping (3.9-rasmga qarang, a).
Formuladan (2) foydalanganda, biz bor FROM = 10, Da = 7, FROM O = 4.
olamiz V= 2 7 – 10 – 4 = 14 – 14 =0, bu GN CO tizimini bildiradi. Biroq, fermer xo'jaligining shakllanishini tahlil qilish (4-misolga qarang) tizimning bir zumda o'zgaruvchanligi haqida xulosaga olib keladi. Ushbu misol tizimning turi bo'yicha yakuniy xulosa uchun formula bo'yicha tizimning erkinlik darajasini hisoblashning etarli emasligini ko'rsatadi.
Misol 9. Tizimning kinematik tahlili (3.10-rasm, a).
Tizim uchta D1, D2 va D3 disklaridan iborat bo'lib, ular o'zaro beshta 1...5 bo'g'inlar bilan bog'langan. D1 va D3 disklari erga A va B bo'g'imli tayanchlar orqali biriktirilgan bo'lib, ularning har biri ikkita tayanch bo'g'iniga teng. Shunung uchun D = 3, V = 0, FROM = 5, FROM O = 4 va formula (1) bo'yicha olamiz
V= 3 3 - 2 0 - 5 - 4 = 9 - 9 = 0.
Tizim quyidagi ketma-ketlikda yig'iladi:
1-bosqich. D2 va D3 disklari 2-qoidaga muvofiq 3, 4, 5 havolalar orqali ulanadi va yangi D diskini hosil qiladi (3.10-rasm, b);
2-bosqich. 3-qoidaga muvofiq uchta disk (D1, D va tuproq) uchta menteşa bilan bog'langan: haqiqiy A, B va xayoliy C, bitta to'g'ri chiziqda yotmaydi.
Shuning uchun tizim GN CO hisoblanadi.
3.10-rasm. Masalan, sxemalar 9
10-misol Tizimning kinematik tahlili (3.11-rasm).
(1) formuladan foydalanib tizimning erkinlik darajasini hisoblash uchun ikkita variantni ko'rib chiqamiz. Birinchi variantda biz tizim beshta diskdan iborat deb hisoblaymiz - singan rodlarABC,ADC va tekis rodlarB.E.Idoralar,D.E.
Keyin menteşalar A ,b,D oddiy, C va E menteşalari esa ikkitadir.
Da D = 5, V = 7, FROM = 0, FROM O = 3 ni olamiz
V= 3 5 - 2 7 - 0 - 3 = 15 - 17 = -2.
3.11-rasm. Masalan, sxema 10
Ikkinchi variantda biz tizim uchta diskdan iborat deb hisoblaymiz -ABC,ADC vaEC , ular oddiy menteşe A, er-xotin menteşe C va ikkita havola bilan bog'langanBO'LING vaD.E.
Da D = 3, V = 3, FROM = 2, FROM O = 3 ni olamiz
V= 3 3 - 2 3 - 2 - 3 = 9 - 11 = -2.
Eslatma: Siz faqat ikkita diskdan iborat tizimni ko'rib chiqa olmaysiz (singan novdalar ABC va ADC ), chunki bu holda novdalar B.E. Idoralar, DE disklarni bir-biriga bog'lamaydi.
Tizim quyidagi ketma-ketlikda yig'iladi:
1-bosqich Disklar ABC vaADClar bitta diskka ikkita A va C ilgaklari, ya'ni to'rtta bo'g'in orqali ulanadi, ulardan biri ortiqcha bo'ladi (2-qoida).
Bosqich 2. E tugun hosil bo'lgan diskka uchta havola bilan biriktirilgan, ulardan biri ortiqcha bo'ladi (1-qoida).
Bosqich 3. Ikkita ortiqcha bo'g'inga ega yig'ilgan disk uchta qo'llab-quvvatlash aloqasi bilan erga biriktirilgan (3-qoida).
Shuning uchun berilgan tizim GN SN (ikki marta).
11-misol. Tizimning kinematik tahlilini bajaring (3.12-rasm).
P.L.Chebishev formulasi bo'yicha tizimning erkinlik darajasini aniqlaymiz:
W \u003d 3D - 2Sh - C 0,
qayerda D- disklar soni, V oddiy menteşalar soni, 0 dan- novdalar soni.
3.12-rasm. Masalan, sxema 11
Barcha menteşalarni va tayanch novdalarni tashlab, biz tizim beshta diskdan iborat ekanligini aniqlaymiz ( D=5). Qo'llab-quvvatlash novdalarini tashlab, biz oddiylarga qisqartirilgan menteşalar sonini aniqlaymiz ( V=6: ikki nuqta DA va FROM, birma-bir - nuqtalarda LEKIN va D). Qo'llab-quvvatlovchi novdalar soni - 0 dan =3.
Bu yerdan V= 3 ∙ 5 – 2 ∙ 6 – 3 = 0, ya'ni tizim geometrik o'zgarmas va statik jihatdan noaniq bo'lishi mumkin. Bu shunday ekanligini tekshirish uchun tizimning tuzilishini tahlil qilaylik. Disklardan beri AB, Quyosh va AC uchta ilgak bilan bog'langan LEKIN , DA va FROM bir to'g'ri chiziqda yotmaydi, keyin ular disk qattiq biriktirilgan diskni hosil qiladi VD menteşe bilan DA va novda SD, uning o'qi menteşe markazidan o'tmaydi. Bu o'zgarmas raqam bir nuqtada kesishmaydigan uchta novda yordamida erga qattiq bog'langan. Shunday qilib, tizim (1.14-rasm) geometrik jihatdan o'zgarmasdir va bir zumda o'zgarmasdir.
12-misol. Tizimning kinematik tahlilini bajaring (3.13-rasm).
3.13-rasm. Masalan, sxema 12
Tizim sharnirli bo'lgani uchun uning erkinlik darajasini aniqlash uchun (2) formuladan foydalanamiz:
W \u003d 2U - C - C 0,
qayerda Da– xo‘jalik tugunlari soni; FROM ichki novdalar soni; 0 dan- qo'llab-quvvatlovchi novdalar soni.
Bu yerda Da =6, FROM=8, 0 dan=3, shuning uchun V= 2∙6 – 8 – 3 = 1.
Shunday qilib, tizim bir darajadagi erkinlikka ega va uni bino strukturasi sifatida ishlatish mumkin emas.
13-misol Fermani o'rganing (3.14-rasm).
3.14-rasm. Masalan, sxema 13
Formula (2) bo'yicha biz fermer xo'jaligining erkinlik darajasini aniqlaymiz: V= 2 ∙ 7 – 11 – 3 = 0, shuning uchun tizim geometrik o'zgaruvchan va statik jihatdan aniqlanishi mumkin.
Keling, tizimni tahlil qilaylik. U uchta diskdan iborat - uchburchaklar ABC, CFG va novda DE novdalar bilan bog'langan BO'LING, AD, EG, D.F., bu xayoliy menteşalar bilan almashtirilishi mumkin Taxminan 1, taxminan 2 va menteşe FROM. Shuning uchun, biz xulosa qilishimiz mumkin: barcha novdalar bir-biriga qattiq bog'langan va shuningdek, bir nuqtada kesishmaydigan uchta novda yordamida erga qattiq bog'langan.
Tizimning bir lahzali o'zgaruvchanligini tekshirish uchun murojaat qiling yuk yo'li- tashqi yuk bo'lmasa, barcha novdalarda qo'llab-quvvatlash reaktsiyalari va kuchlarini aniqlaymiz. Butun tizimning muvozanat shartlaridan (Σ M A= 0; Σ M V= 0; Σ Da=0) qo'llab-quvvatlovchi reaktsiyalar nolga teng ekanligini topamiz. Tugunni kesish E va barcha kuchlarni vertikalga proyeksiya qilsak, vertikal tayoqdagi kuch ekanligini topamiz N DE= 0. Keyin tugunga yaqinlashuvchi ikki kuchning proyeksiyalari tenglamalarini yozing D(uchinchi kuch - N DE= 0), bu novdalarga normalarning yo'nalishlari bo'yicha, biz novdalardagi kuchlarni topamiz DA va D.F. ham nolga teng. Nihoyat, tugunlarning muvozanatini hisobga olgan holda A, F, B, G, biz yuk bo'lmaganda tizimning barcha rodlaridagi kuchlar nolga teng ekanligini aniqlaymiz, shuning uchun tizim o'zgarmasdir.
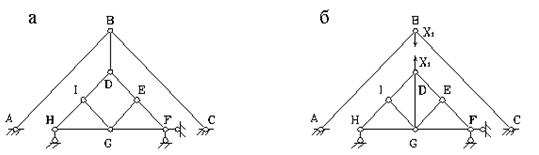
14-misol Tizimning kinematik tahlilini bajaring (3.15-rasm, a).
3.15-rasm. Masalan, sxema 14
Formula (2) bo'yicha biz erkinlik darajasini aniqlaymiz: V= 2 ∙ 9 - 11 - 7 = 0, ya'ni tizim geometrik o'zgarmas bo'lishi uchun zarur bo'lgan minimal ulanishga ega. Tizim haqiqatan ham o'zgarmasligini tekshirish uchun biz foydalanamiz novdani almashtirish usuli. Keling, almashtirish tizimini tanlaymiz (3.15-rasm, b). Bu erda tayoq tushiriladi BD, va uning harakati kuchlar bilan almashtiriladi X 1, va almashtirish novda qo'shildi DG. Tanlangan almashtirish tizimi o'zgarmasdir: rodlar AB, quyosh yer esa bir to'g'ri chiziqda yotmaydigan uchta ilgak bilan qattiq bog'langan. Va tizimning pastki qismi o'zgarmaydi, chunki u uchburchakdan iborat (masalan, GHI), unga boshqa barcha tugunlar dyadlar yordamida qattiq bog'langan va bularning barchasi erga uchta qo'llab-quvvatlovchi novda bilan biriktirilgan.
Endi kuchlardan almashtirish novdadagi kuchni aniqlaymiz X 1= 1. Tugunlarni ketma-ket kesib tashlash E, I, G va ularning muvozanatini hisobga olsak, biz almashtirish novdasidagi kuch nolga teng ekanligini olamiz, shuning uchun asl tizim bir zumda o'zgaruvchan.
15-misol 3.16-rasmda ko'rsatilgan tizimning shakllanishini tahlil qiling .
3.16-rasm. Masalan, sxema 15
Birinchidan, biz tizimning erkinlik darajasini aniqlaymiz. Tizim menteşeli novda bo'lgani uchun biz formuladan foydalanamiz (2) W \u003d 2U - C - C 0. Tizim tugunlari soni Da=6, tizimning novdalar soni FROM=8, tayanch novdalar soni FROM 0 =3, shuning uchunV= 2 ∙ 6 - 8 - 3 = 12 - 1 = +1. Tizim bir darajadagi erkinlikka ega va uni bino strukturasi sifatida ishlatish mumkin emas.
16-misol 3.17-rasmda ko'rsatilgan tizimning shakllanishini tahlil qiling, a.
3.17-rasm. Masalan, sxema 16
1. Formuladan foydalanish (2) W \u003d 2U - C - C 0 menteşe-rod tizimlari uchun biz erkinlik darajalari sonini aniqlaymiz. Tizim tugunlari sonidan beri Da=6, tizimning novdalar soni FROM=9, tayanch novdalar soni FROM 0 =3, shuning uchunV= 2 ∙ 6 – 9 – 3 = 0, shuning uchun tizim o'zgarmas va statik aniqlanishi uchun zarur bo'lgan ulanishlar soniga ega.
2. Tizimning tuzilishini tahlil qilamiz. Uchinchi xususiyatga ko'ra, o'zgarmas tizim bo'lgan 123-uchburchakni ko'rib chiqing. Agar uni qattiq disk deb hisoblasak (3.17-rasmda ko'rsatilgan), b), biz 4-tugunni unga ikkita novda (3-4 va 2-4) bilan biriktiramiz.Bu novdalar bir to'g'ri chiziqda yotmaydi, shuning uchun birinchi tamoyilga asoslanib, 4-tugun 123-diskga qattiq biriktirilgan. Olingan tizim ham qattiq diskdir (3.17-rasmda soyali, ichida). 5-tugunni ikkita novda (4-5 va 2-5) bilan bog'lab, biz yana 3.17-rasmda soyali qattiq diskni olamiz, G). Ushbu diskka biz oxirgi tugun 6 ni ikkita novda (3-6 va 5-6) bir tekis chiziqda yotmagan holda biriktiramiz.
Tizim konstruktiv jihatdan o'zgarmas tizimlarni shakllantirish tamoyillariga muvofiq tuzilganligi sababli, u o'zgarmasdir va bir zumda o'zgarmaydi. Tizim, shuningdek, bir nuqtada kesishmaydigan uchta qo'llab-quvvatlovchi novda yordamida erga qattiq bog'langan.
17-misol. masalan 17
1. Formuladan foydalanish W \u003d 2U - C - C 0 menteşe-rod tizimlari uchun biz erkinlik darajalari sonini aniqlaymiz. Tizim tugunlari sonidan beri Da=9, tizimning novdalar soni FROM=15, tayanch novdalar soni FROM 0 =3, shuning uchunV= 2 ∙9 - 15 - 3 = 0, shuning uchun tizim geometrik o'zgarmas bo'lishi uchun zarur bo'lgan ulanishlar soniga ega.
2. Tizimning tuzilishini tahlil qilamiz. Birinchidan, tizimning aniq o'zgarmas qismlarini topamiz - uchburchaklar hosil qilgan ikkita disk (3.18-rasmda soyali, b). Ular uchta novda bilan bog'langan. Biroq, bu tayoqlar bir nuqtada kesishadi (ya'ni,k ustida guruch. 3.18, b). Shunday qilib, tizim darhol o'zgarishi mumkin.
18-misol . Rasmda ko'rsatilgan tizimni tahlil qiling. 3.19.
Tizim to'rtta diskdan iborat (A C, C E , EF vaFH) ya'ni. D= 4. Menteşalar soni V = 3 (barcha menteşalar oddiy). Malumot soni tayoqchalar FROM 0 =2+1 ∙ 4=6. Formula bo'yicha tizimning erkinlik darajasi W \u003d 3D - 2Sh - C 0 = 3 ∙ 4-2 ∙ 3-6=0.
3.19-rasm. Masalan, sxema 18
Tizimning o'zgarmasligi uchun zarur shart qondiriladi. Biz strukturani tahlil qilamiz. Disk AC bir nuqtada kesishmaydigan uchta qo'llab-quvvatlash majmuasi bilan erga ulangan. Ushbu biriktirma diskning harakatsizligini ta'minlaydi AC. Unga bog'langan FROM va tayanch tayoq bilan erga nuqtadaD disk biriktirilgan SE. Bunday holda, tayoqning o'qiD menteşe orqali o'tmaydi FROM. Pivot orqali hosil bo'lgan o'zgarmas tizimgaEF va nuqtalarda ikkita tayanch novdaG va H biriktirilgan diskFH. Bu uchta novda bir nuqtada kesishmaydi.
Shunday qilib, ko'rib chiqilayotgan tizim o'zgarmasdir va bir zumda o'zgarmaydi. Formulaga ko'ra W \u003d 3D - 2Sh - C 0 = 3 ∙2 -2 ∙1 -4=0.
Shunday qilib, tizim o'zgarmas bo'lishi uchun kerakli miqdordagi ulanishga ega. Keling, uning tuzilishini tahlil qilaylik.
Tuproq bilan birgalikda tizim menteşe bilan o'zaro bog'langan uchta diskdan iborat Sh 1–2 va shartli menteşelere teng bo'lgan to'rtta rod Sh 1–3 va Sh 2–3.
Uchta diskni bog'laydigan uchta menteşa bir xil to'g'ri chiziqda joylashganligi sababli, tizim bir zumda o'zgarishi mumkin.
20-misol. Menteşali rod tizimlarining kinematik tahlilini bajaring (3.21-rasm, a, b).
a)
 b)
b)
3.21-rasm. Masalan, sxema 20
a) biriktirilmagan xo'jalik, qaerda FROM = 9, Da = 6, 9 = 2 ∙ 6 - 3, geometrik jihatdan o'zgarmaydi, chunki ichki - I va tashqi - II disklar uchta novda bilan bog'langan.
b) biriktirilgan xo'jalik, qaerda FROM = 9, Da = 6, FROM 0 = 3, 9 + 3 = 2 ∙ 6 geometrik jihatdan o'zgarmasdir, chunki I va II disklar uchta novda bilan bog'langan.
21-misol. Rod tizimlarining kinematik tahlilini bajaring (3.22-rasm, a B C).
a) biriktirilmagan menteşe-rod tizimi, bu erda FROM = 11, Da = 7, 11 = 2 ∙ 7 - 3, geometrik jihatdan o'zgarmasdir. Uch ilmoqli kamar usuli bilan tuzilgan, ya'ni uchta I, II, III disklar, ular bitta haqiqiy (1, 2) va ikkita uydirma (2, 3; 1, 3) bilan bog'langan, ular birida yotmaydi. to'g'ri chiziq.
b) biriktirilgan menteşe-rod tizimi, bu erda FROM = 6, Da = 5, FROM 0 = 4, 6 + 4 = 2 ∙ 5 bir zumda geometrik o'zgaruvchan. I, II, III uchta diskni birlashtiruvchi uchta ilgak (1, 3; 1, 2; 2, 3) bitta to'g'ri chiziqda yotadi.
c) biriktirilgan birlashtirilgan tizim, bu erda D= 2, Vt = 1, FROM 0 = 4, V = 3 ∙ 2 - 2 ∙ 1 - 4 = 0, bir zumda geometrik o'zgaruvchan bo'ladi, chunki uchta I, II, III disklarni bog'laydigan bitta haqiqiy (1, 2) va ikkita uydirma ilgak (1, 3; 2, 3) bitta to'g'ri chiziqda yotadi.
a)  b)
b)  ichida)
ichida) 
3.22-rasm. Masalan, sxema 21
3.3. Tizimning o'zgaruvchanligi darajasi
Yerdan tashqari tizimlar
Erkinlik darajasi o'rniga er bo'lmagan tizim uchun V o'zgaruvchanlikning xarakterli darajasi kiritiladi V, bu formulalar bilan hisoblanadi:
V \u003d 3D - 2Sh - C - 3,(3)
V \u003d 2U - C - 3,(4)
bu erda belgining ma'nosi (1) va (2) formulalardagi kabi.
Agar a V> 0, u holda tizim geometrik o'zgaruvchan bo'ladi.
Agar a V= 0, u holda tizim geometrik o'zgarmas va statik aniqlangan.
Agar a V < 0, то система геометрически неизменяемая и статически неопределимая.
Geometrik o'zgarmaslik shartlariV=0 vaV<0 являются необходимыми, но недостаточными. Для окончательного вывода о виде системы необходимо анализировать порядок образования системы (см.примеры ниже).
22-misol. Tizimning kinematik tahlili (3.23-rasm).
C biz tizim ikkita singan novdadan iborat ekanligini o'qiymizABC,CDE va to'rtta tekis tayoqAB, BC, CD,D.E.
ilmoqlar A va E - oddiy, menteşeliB vaD - ikki marta, menteşe C - uch marta.
Da D= 6, V = 9, FROM= 0 olish
V= 3 6 - 2 9 - 0 - 3 = 18 - 21 = -3.
3.23-rasm. Masalan, sxema 22
Biz tizimning shakllanish tartibini tahlil qilamiz. ABC singan novda ustiga ikkita AB va BC bog'lari qo'yilgan, ular ortiqcha. Xuddi shunday, ulanishlar ortiqchaCD vaBuzilgan novda uchun DEC.D.E. Ikkita disk ABC vaCDE'lar faqat C menteşesi orqali ulanadi va 2-qoidadan foydalanish uchun bitta havola etishmayapti.
Shunday qilib, tizim geometrik jihatdan o'zgaruvchan bo'lib, uning alohida qismlarida uchta ortiqcha bog'lanish mavjud. Ba'zi bir bog'lanishlarning joylashishini o'zgartirish, masalan, novdani almashtirish orqali tizimni geometrik o'zgarmas qilish mumkin.miloddan avvalgi novdaB.D.
23-misol. Tizimning kinematik tahlili (3.24-rasm).
Ramka ikkita yopiq konturga ega va formula (3) yopiq konturlarning mavjudligiga yo'l qo'ymaydi. Shuning uchun biz ramkani to'rt qismga ajratamiz, har bir bo'limda uchta havola bilan o'zaro bog'langan uchta qismga (disk) ajratamiz.
3.24-rasm. Masalan, sxema 23
Keyin olamiz D= 3, V = 0,
FROM= 3∙4 =12 va o'zgaruvchanlik darajasi
V = 3∙3 –0 – 12 – 3 = –6.
Biz tizimning shakllanish tartibini tahlil qilamiz. Chap disk o'rta diskga oltita bo'g'inlar orqali biriktirilgan, ulardan uchtasi ortiqcha. Keyin o'ng disk hosil bo'lgan diskka oltita bog'lanish yordamida biriktiriladi, ulardan uchtasi ham ortiqcha.
Shunday qilib, tahlil qilingan tizim geometrik jihatdan o'zgarmasdir va oltita ortiqcha bog'lanishni o'z ichiga oladi.
Mexanizmlarning kinematik tahlili
Kirish
5. Kinematik diagrammalar
Adabiyot
Kirish
Test ishining mavzusi “Mexanizmlar va mashinalar nazariyasi” fanidan “Mexanizmlarning kinematik tahlili”.
Ishning maqsadi: mexanizmlarning kinematik tahlili bo'yicha bilimlarni shakllantirish.
Ishning vazifalari: mexanizmlarni kinematik tahlil qilish usullari bilan tanishish.
Mavzuning asosiy savollari:
1. Kinematik tahlilning asosiy vazifalari va usullari;
2. Mexanizmning bo'g'inlari pozitsiyalarini qurish;
3. Mexanizmning joylashuvi funksiyasi;
4. Tezlik va tezlanishlarni aniqlashning asosiy tenglamalari;
5. Kinematik diagrammalar.
1. Kinematik tahlilning asosiy vazifalari va usullari
Mexanizmlar kinematikasining asosiy vazifasi bu bo'g'inlarga ta'sir qiluvchi kuchlardan qat'i nazar, mexanizmlar bo'g'inlarining harakatini o'rganishdir.
Mexanizmlarni kinematik o'rganishda quyidagi asosiy masalalar ko'rib chiqiladi:
1) tezlik rejalarini qurish;
2) mexanizmning istalgan nuqtasining traektoriyasini qurish;
3) mexanizmning istalgan nuqtasining tezligi va tezlanishini aniqlash, mexanizmning istalgan bo‘g‘inining burchak tezliklari va tezlanishlarini aniqlash, traektoriyaning istalgan nuqtasida egrilik radiusini aniqlash va hokazo.
Kinematik tadqiqotlar grafik usullar yordamida ham, analitik usulda ham amalga oshirilishi mumkin. Grafik tadqiqot usullari muhandislik amaliyoti uchun etarli aniqlikni ta'minlagan holda, odatda analitik usullardan ko'ra sodda va aniqroq bo'lib chiqadi. Biroq, muayyan turdagi mexanizm tizimli ravishda chuqur o'rganilganda, analitik usul qulayroqdir.
Chizmadagi grafik konstruksiyalarda faqat bog`lamlarning uzunliklarini emas, balki alohida nuqtalarning tezligi va tezlanishlarini hamda boshqa miqdorlarni ham tasvirlash kerak. Bunday sharoitlarda haqiqiy qiymatning tasvirga nisbati bo'lgan masshtab koeffitsientidan foydalanish qulay:
Masshtab omili;
Masshtab omili;
Masshtab omili
2. Mexanizmning bo'g'inlari pozitsiyalarini qurish
Harakatlanuvchi mexanizmning bo'g'inlarining o'zaro joylashishi har doim o'zgarib turadi, lekin har qanday vaqtda bo'g'inlarning joylashishi aniq. Vaqtning tanlangan nuqtasiga mos keladigan bog'lanishlarning nisbiy holatining grafik tasviri mexanizmning rejasi deb ataladi. Birin-ketin vaqt o'tishi uchun qurilgan mexanizmning ketma-ket rejalari pozitsiyalar rejasi deb ataladi va mexanizmning harakatini vizual ravishda kuzatishga imkon beradi.
Mexanizm pozitsiyasi rejasini qurish ushbu bo'g'inning tasviridan boshlanadi, uning pozitsiyasi ma'lum bir vaqt uchun o'rnatiladi.
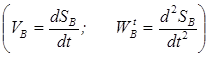
Krank-slayder mexanizmi
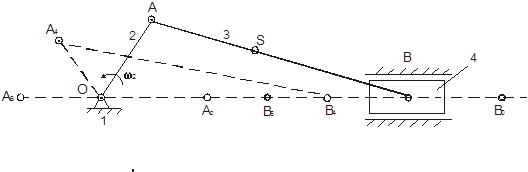
Markazdan O - krank OA ning radiusli aylanish o'qi va slayder harakatining X - X o'qida biz B 0 - o'ng B 6 - chap ekstremal slayder B. To'g'ridan-to'g'ri OA 0 B 0 ni belgilaymiz. va OA 6 B 6 - B 0 va B 6 slayderlarining ekstremal pozitsiyalariga mos keladigan mexanizmning pozitsiyalari. Krankning A barmog'ining traektoriyasini A 0 nuqtadan 12 ta teng qismga ajratamiz va olingan A 1, A 2, A 3 ... A 11 nuqtalardan radiuslari AB == ... B pozitsiyalarini belgilaymiz. B 0 V 6 chizig'idagi slayderning 1, B 2, B 3 ... B 11. A 1, A 2, A 3 ... A 11 nuqtalarini markaz O va mos keladigan B 1, B 2, B 3 ... B 11 nuqtalari bilan bog'lab, mexanizmning rejalarini olamiz. Birlashtiruvchi novdaning S 0, S 1, S 2 ... S 11 markazlarini turli xil pozitsiyalarida ketma-ket bog'laydigan egri chiziq bog'lovchi novda egri chizig'i bo'ladi.
3. Mashinaning joylashuvi funksiyasi
Mexanizmning joylashuv funktsiyasi - chiqish zvenosi koordinatasining mexanizmning umumlashtirilgan koordinatalariga bog'liqligi.
Mexanizm bo'g'inlari va nuqtalarining siljishi, tezligi va tezlanishlari etakchi sifatida qabul qilingan mexanizm bo'g'inlarining siljishi, tezligi va tezlanishi funktsiyalari hisoblanadi. Mexanizmning etakchi bo'g'inlari soni mexanizmning erkinlik darajalari soniga yoki bir xil bo'lgan mexanizmning umumlashtirilgan koordinatalari soniga teng bo'lishi kerak.
Keling, etakchi bo'g'inlar qonunlari qanday shaklda berilishi mumkinligini ko'rib chiqaylik. Bu qonunlar siljish, tezlik va tezlanish funksiyalari deb ataladi.
O'zgartirish funktsiyasini analitik shaklda etakchi bo'g'inning siljishini vaqt bilan bog'laydigan tegishli funktsiya sifatida ko'rsatish mumkin (2-rasm).
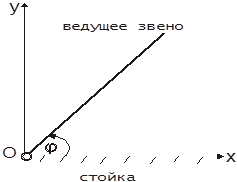
Agar yetakchi bo‘g‘in stend bilan aylanma juftlikka kiritilgan bo‘lsa, u holda ph=ph (t) funksiyasi o‘rnatiladi, bunda: ph – stend bilan bog‘langan qo‘zg‘almas XOY koordinata tizimiga nisbatan yetakchi bo‘g‘inning burilish burchagi, va t - vaqt.
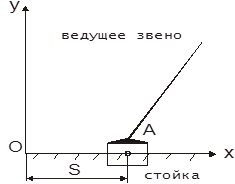
Agar yetakchi bo‘g‘in translatsiya juftligiga kiritilgan bo‘lsa, u holda s=s (t) funksiya o‘rnatiladi, bunda s – yetakchi bo‘g‘inning ixtiyoriy tanlangan A nuqtasining stend bilan bog‘langan qo‘zg‘almas koordinatalar tizimiga nisbatan siljishi va t - vaqt.
ph=ph (t) va s=s (t) funksiyalarini egri chiziqlar shaklida ham grafik ko‘rsatish mumkin, bunda ordinata o‘qlari ph yoki siljish burchaklarini s ba’zi tanlangan masshtablarda va , abscissa o‘qlari esa ko‘rsatadi. tanlangan masshtabdagi vaqt t (3-rasm).
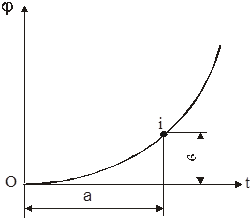
ph 0 = 0; ph i - ph 0 = · ichida;
Shunga ko'ra, etakchi bo'g'inning ph i burchagi bo'ylab burilish vaqti t i ga teng:
t i - t 0 = · a ;
Agar yetakchi bo‘g‘inning harakat qonuni tezlik funksiyalari ō=ō (t) yoki v=v (t) ko‘rinishida berilgan bo‘lsa, u holda tezlik funksiyalaridan siljish funksiyalariga o‘tishni integrallarni hisoblash yo‘li bilan amalga oshirish mumkin:
kinematik tahlil mexanizmini tezlashtirish
 va
va  ;
;
bu erda: ph 0 , s 0 , t 0 - burchak, siljish va etakchi bo'g'inning dastlabki holatiga mos keladigan vaqt.
Agar yetakchi bo‘g‘inning harakat qonuni tezlanish funksiyalari e=e (t) va ō=ʼn (t) ko‘rinishida berilgan bo‘lsa, tezlik funksiyalariga o‘tish integrallarni hisoblash yo‘li bilan amalga oshiriladi:
 va
va 
bu erda: ō 0, v 0, t 0 - burchak tezligi, chiziqli tezlik va etakchi bo'g'inning dastlabki holatiga mos keladigan vaqt.
4. Tezlik va tezlanishlarni aniqlashning asosiy tenglamalari
Kinematik juftlik zvenolarining umumiy nuqtalarining tezliklari va tezlanishlari o'rtasidagi bog'liqlik juftlikka bog'liq.
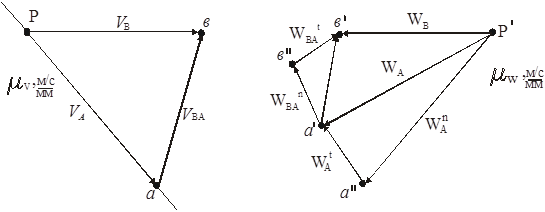
Tezliklar va tezlanishlar uchun vektor tenglamalarini tuzishning ikkita holatini ko'rib chiqing:
a) ikkita nuqta bir zvenoga tegishli va bir-biridan masofa bilan ajralib turadi l ( 4-rasm).
Nazariy mexanikadan ma'lumki, absolyut qattiq jismning istalgan nuqtasining tezligini translatsiya va nisbiy harakatlar tezliklarining geometrik yig'indisi sifatida ifodalash mumkin.
Ko'rib chiqilayotgan zveno uchun translatsiya harakati A nuqta tezligidagi translatsiya harakati, nisbiy harakat esa A nuqta atrofidagi aylanma harakatidir. B nuqta tezligi uchun vektor tenglamasi:
![]() ;
;
Bog'lanish A nuqta atrofida aylanganda, B nuqta aylana bo'ylab harakatlanadi ββ nuqtadan tasvirlangan A. Shuning uchun, tezlik V BA yoyga tangensialdir ββ , ya'ni. AB chiziqqa perpendikulyar.
Tezlikning qiymati V BA =ō·AB yoki V BA =ō·.
tomon V BA yo'nalishini topishingiz mumkin ō va aksincha.
Chunki ko'chma harakat translatsiya sifatida tanlanadi, keyin B nuqtasining tezlashishi 2 ta tezlanishdan iborat bo'lishi mumkin: A nuqtasining tezlashishi va B nuqtasining A nuqtasi atrofida aylanishi paytida tezlashishi.
![]()
B nuqtasi aylana bo'ylab harakat qilganda ββ tezlanish W BA 2 ta tezlanishdan iborat: normal, aylanish markaziga yo'naltirilgan va tangensial, yoyga tangensial yo'naltirilgan. ββ , ya'ni. AB chiziqqa perpendikulyar. B nuqtasi tezlanishi uchun vektor tenglamasi:
![]() ;
;
Tezlashtirish qiymatlari va formulalar bilan aniqlanadi:
= ō 2 =  ;
;
bu yerda: e - burchak tezlanishi;
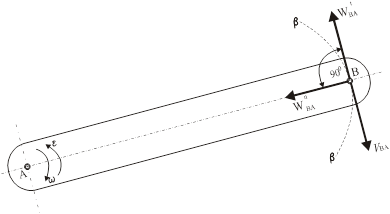
b) ikki nuqta tarjima juftligini tashkil etuvchi ikkita zvenoga tegishli va ma'lum vaqt momentida mos tushadi (5-rasm).
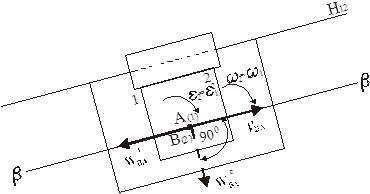
A nuqta 1-bo'g'inga tegishli, B nuqta 2-bo'g'inga tegishli. Vaqtning bu nuqtasida A va B nuqtalari mos tushadi (B nuqtasi A nuqta ustida joylashgan). 1 va 2 havolalar H 12 yo'riqnomasi bilan tarjima juftligini hosil qiladi.
B nuqtasi tezligi 2 tezlikdan iborat - portativ va nisbiy. Bu erda ko'chma harakat 1-bo'g'inning harakatidir, shuning uchun A nuqtasining tezligi V A portativ bo'ladi. B nuqtaning nisbiy tezligi 2-zvenoning 1-zvenoga nisbatan harakat tezligiga teng. 2-zveno 1-zvenoga nisbatan harakat qilganda, B nuqta toʻgʻri chiziq boʻylab harakatlanadi. ββ , H 12 yo'riqnomasiga parallel. Shunday qilib, nisbiy tezlik V VA H 12 ga parallel.
Tarjima harakati translyatsion bo'lmaganda B nuqtasining tezlashishi 3 ta tezlashuvning yig'indisi: portativ, ya'ni. A nuqtaning tezlashishi, nisbiy va aylanish yoki Koriolis. Nisbatan harakatda B nuqta chiziq bo'ylab harakatlanadi ββ , shuning uchun bu harakatda B nuqtasi faqat shu chiziq bo'ylab yo'naltirilgan tangensial tezlanishga ega, ya'ni. H 12 yo'riqnomasiga parallel. Bu tezlanishni deb belgilaymiz. Aylanish (koriolis) tezlanishi bilan belgilanadi.
B nuqtasining tezligi va tezlanishi uchun vektor tenglamalari quyidagicha ko'rinadi:
1 va 2 bog'lanishlar tarjima juftligini tashkil qilganligi sababli, ular nisbiy aylanishga ega emas. Shuning uchun bu zvenolar bir xil burchak tezliklari va burchak tezlanishlariga ega, ya'ni: ō 2 =ō 1 va e 2 =e 1, bu erda ō 1 - tarjima harakatining burchak tezligi (1-zvenoning aylanishi).
Vektor burchak tezligi ō 1 yo'nalishi bo'yicha 90 0 ga aylantirilsa, vektor yo'naltiriladigan tomonga yo'naltiriladi. Uning qiymati quyidagi formula bo'yicha aniqlanadi:
Krank-slayder mexanizmining slayderining tezligi va tezlanishini aniqlaymiz.
Mexanizmning rejasi berilgan, o'lchamlari ℓ OA, ℓ AB, ō 2, e 2.
4-zvenoning tezligi va tezlanishini (B nuqtalari) va 3-zvenoning burchak tezligini va tezlanishini toping.
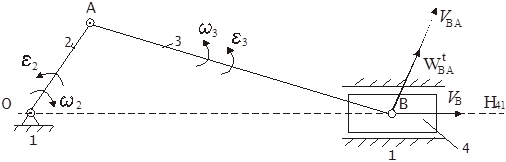
ō 2 ni bilib, biz V A \u003d ℓ OA · ō 2 ni topamiz. Tezlik VA tezliklar rejasida segment shaklida tasvirlang "P a", OA ga perpendikulyar (7-rasm). Piston (4-bo'g'in) oldinga siljiydi, shuning uchun uning barcha nuqtalari B nuqtasi bilan bir xil tezlik va bir xil tezlanishga ega.
7-rasm 8-rasm
Biroq, B nuqtasi nafaqat 4-bo'g'inga, balki 3-bo'g'inga ham tegishli. Xuddi shu tarzda, A nuqta 2 va 3 bog'lanishlar uchun umumiy nuqtadir. Shunday qilib, 3-bo'g'inda har biridan ajratilgan ikkita A va B nuqta mavjud. boshqa masofada ℓ AB. Shunday qilib, B nuqtasi tezligi:
![]() qayerda: ║
qayerda: ║ ![]() ;
;
Ushbu tenglamaga muvofiq biz tezlik rejasini tuzamiz. Bir nuqtadan o'tish a AB ga perpendikulyar chiziq va P nuqta orqali - H 41 ga perpendikulyar chiziq. Kesishish nuqtasida qo'ying ichida. P segmenti ichida B nuqtasining tezligini va segmentni ifodalaydi av- B nuqtasining A ga nisbatan tezligi ( V VA). 3-bo'g'inning burchak tezligi quyidagi formula bo'yicha topiladi:
Vektorni B nuqtaga siljitib, ō 3 yo'nalishini (soat miliga teskari) topamiz.
Tezlanish nuqtasi A:
Qutbdan (8-rasm) tezlanishni kechiktirish va segmentlar shaklida va , A nuqtaning umumiy tezlanishini topamiz (segment ).
B nuqtasi tezlashishi:
![]()
qaerda: ; ║ va AB;
Tezlanish B nuqtadan A nuqtaga yo'naltiriladi. Nuqtani chetga surib qo'yish a' ( tezlashtirish rejasi bo'yicha) segmenti a 'to'', mos keladigan , nuqta orqali chizish '' ichida AB ga perpendikulyar chiziq. R qutbi orqali ′ H 41 ga parallel chiziq chizing. Bu chiziqlar bir nuqtada kesishadi ichida ', P segmenti "ichida" nuqta B (W B) va segmentning kerakli tezlanishini ifodalaydi "da"- tezlashtirish. W B va V B yo'nalishlarini taqqoslashdan biz 4-bo'g'in sekin harakatlanmoqda degan xulosaga keldik.
3-bo'g'inning burchak tezlanishi quyidagi formula bo'yicha topiladi.
Vektorni B nuqtaga o'tkazish e 3 ning, ō 3 kabi, soat sohasi farqli ravishda yo'naltirilganligini ko'rsatadi.
Tenglamalarda kattaligi va yo'nalishi bo'yicha ma'lum vektorning tagiga ikkita chiziq chiziladi va faqat yo'nalishi bo'yicha ma'lum vektorning tagiga bitta chiziq chiziladi.
5. Kinematik diagrammalar
Kinematik diagramma - o'rganilayotgan mexanizm nuqtasi yoki bo'g'inining kinematik parametrlaridan birining (o'zgartirishlar, tezliklar va tezlanishlar) vaqt, burilish burchagi yoki ushbu mexanizmning etakchi bo'g'inining siljishi sifatida grafik tasviri, ya'ni. umumlashgan koordinata vazifasida. Kinematik diagrammalar mexanizmning to'liq kinematik tavsifini beradi.
Krank-slayder mexanizmining kinematik diagrammalarini quramiz.
B nuqtaning S B, tezliklar V B va tezlanishlari W B uchun to'g'ri chiziqli harakatlanayotganligi sababli, bu miqdorlarning t yoki vaqtga bog'liqligi ko'rinishidagi kinematik diagrammalarni qurish qulay. umumlashtirilgan koordinata ph 2, ya'ni. bog'liqliklarning grafik tasvirini yaratish:
S B =S B (t), V B =V B (t), W B =W B (t) yoki:
S B \u003d S B (ph 2), V B \u003d V B (ph 2), W B \u003d W B (ph 2)
burchak ph 2 aylanish aloqasi 2 umumlashtirilgan koordinata sifatida tanlangan bo'lsa.
Agar bog'lovchi novda ph 3, burchak tezliklari ō 3 va burchak tezlanishlari e 3 tadqiq qilinadigan bo'lsa, bog'liqliklarning grafik tasvirini qurish mumkin:
ph 3 \u003d ph 3 (t), ō 3 \u003d ō 3 (t), e 3 \u003d e 3 (t)
ph 3 \u003d ph 3 (ph 2), ō 3 \u003d ō 3 (ph 2), e 3 \u003d e 3 (ph 2)
Krank OA doimiy burchak tezligi ō 2 bilan aylanadi.
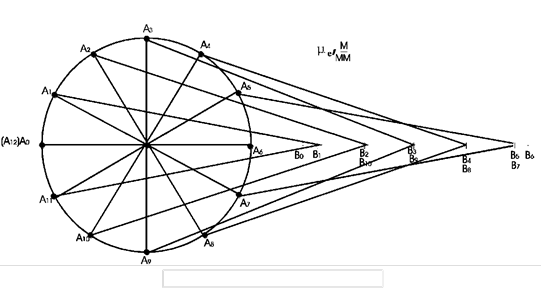
5.1 Siqilish diagrammasini qurish
1) Mexanizmning diagrammasini m e masshtabida bir nechta, masalan, krank OA ning 30 0 ga ketma-ket burilishlariga mos keladigan o'n ikkita pozitsiyada chizamiz (9-rasm). Krankning dastlabki holati uchun biz OA 0 ni olamiz, unda B slayderi o'ta o'ng pozitsiyani B 0 egallaydi;
2) biz S B -t koordinata o'qlarini quramiz (10a-rasm) va abscissa o'qi bo'yicha ℓ mm segmentini chizamiz, bunda krankning bir to'liq aylanish vaqtini masshtabda tasvirlaymiz: ![]() ; bu yerda: rad/mm, ;
; bu yerda: rad/mm, ;
Biz ℓ segmentini 12 ta teng qismga bo'lamiz va y o'qi bo'ylab mos keladigan 1, 2, 3 ... nuqtalarida biz B nuqtadan uning o'ta o'ng holatidan B 0 o'tgan S B 1, S B 2 ... masofalarini chizamiz.
Eng chap B 6 pozitsiyasiga masofalar ko'payadi va B 6 pozitsiyasidan boshlab ular kamayadi; krank dastlabki holatiga kelganda A 0 , egri chiziqning ordinatasi (S B -t) nolga teng bo'ladi.
3) olingan 0, 1 N, 2 N, 3 N, … nuqtalarini silliq chiziq bilan ketma-ket bog'laymiz. Olingan egri chiziq B nuqtasining masofa diagrammasi bo'ladi.
Agar ph ning burilish burchaklari abscissa o'qi bo'ylab chizilgan bo'lsa, u holda bu egri chiziq funktsional bog'liqlikni ifodalaydi:
Tezlik va tezlanish diagrammalari tezlik va tezlanish rejalari va grafik farqlash usullari yordamida tuzilishi mumkin:
 .
.
Grafik farqlash usuli:
1) diagramma (S B -t) ostida biz O 1 V B, O 1 t koordinata o'qlarini quramiz (2.10b-rasm) va O 1 t o'qning davomida chapga O 1 P \ segmentini chetga qo'yamiz. u003d H 1 mm (o'zboshimchalik bilan, differensial egri chiziq chizish uchun ajratilgan joyda joylashgan bo'lishi uchun);
2) "P" nuqtadan 01n kesmalarda egri chiziqning akkordlariga (S B -t) parallel ravishda P 1, P 2, P 3 ... nurlarni chizamiz; 12; 2N3….
Bu nurlar o'qi bo'yicha kesilgan bo'ladi O 1 B segmentlari 0 1 1; 0 1 2; 0 1 3…, diagrammaning mos keladigan qismida o'rtacha tezlik V c ga proportsional;
3) ushbu segmentlarni tegishli bo'limlarning o'rtacha ordinatalariga qo'ying;
4) olingan bir qator I, II, III nuqtalarni ... silliq egri chiziq bilan bog'lang; bu egri chiziq tezlik diagrammasi (V 0 -t) bo'ladi.
Tezlik diagrammasiga ega bo'lgan holda, biz ham xuddi shunday tezlanish diagrammasini tuzamiz.
Ushbu usul bilan diagrammalarni (V 0 -t) va (W B -t) qurishda, bu diagrammalarning x o'qining ekstremal kesimlarining yarmiga mos keladigan qismlarini olish mumkin emas. Diagrammani bajarish uchun siz qo'shimcha ravishda o'rtacha ko'rsatkichlarni yaratishingiz kerak V V va keyingi tsiklning bir yoki ikkita bo'limi uchun.
9-rasm Tezlik pozitsiyalarining rejasi
10-rasm Kinematik diagrammalar
Grafik shkalasi avvalgidek qoladi.
Ordinata o'qlari bo'ylab masshtablar quyidagi formulalar bilan aniqlanadi:
Tezlik jadvali uchun:  ;
;
tezlashtirish diagrammasi uchun:  ,
,
Diagramma usuli oddiy va tushunarli, ammo quyidagi kamchiliklarga ega:
1) noaniqlik, ayniqsa katta egrilik bilan egri chiziqlarni farqlashda;
2) egri chiziqli harakatni to'liq o'rgana olmaslik, chunki tezlik egri chizig'ini differensiallash orqali biz faqat tangensial tezlanishlardagi o'zgarishlar diagrammalarini olamiz;
3) diagrammalar faqat vektorlarning raqamli qiymatlarini beradi, ularning yo'nalishi faqat ba'zi qo'shimcha konstruktsiyalardan keyin o'rnatilishi mumkin.
Tezlik va tezlanishlarni rejalashtirish usuli ko'rsatilgan kamchiliklarga ega emas, shuning uchun u turli mexanizmlarni o'rganishda keng qo'llaniladi.
Adabiyot
1. Artobolevskiy I.I. Mexanizmlar va mashinalar nazariyasi. M, 1975, 103-182-betlar.
2. Korenyako A.S. va boshqalar Mexanizmlar va mashinalar nazariyasi bo'yicha kurs loyihasi. Kiev, 1970, 82-102-betlar.
Mexanizmlarning kinematik tahlili. Kinematik tahlilning maqsad va vazifalari
Kinematik mexanizm tahlili- o'zgarish qonuniyatlarini o'rganish maqsadida uning asosiy parametrlarini o'rganish va shu asosda bir qator ma'lum mexanizmlardan eng yaxshisini tanlash. Sintez bilan solishtirganda, mexanizm tahlili amaliyotda keng qo'llaniladi.
Mexanizmning kinematik tahlili yoki ma'lum bir moment uchun yoki kirish aloqasining ma'lum bir pozitsiyasi uchun amalga oshiriladi; ba'zan mexanizmning tahlil qilingan holati uchun uning har qanday bo'g'inlarining nisbiy holati ko'rsatiladi.
Maqsadlar:
1. Bog'lanishlarning kinematik xarakteristikalarini aniqlash: siljish; tezlik; tezlashtirish; harakat traektoriyasi; kirish (etakchi) bo'g'inlar harakatining ma'lum qonunlari bilan pozitsiya funktsiyasi.
2. Ishchi (chiqish) zvenosining kinematik ish sharoitlarini baholash.
3. Mexanizmning quvvat, dinamik, energiya va boshqa hisob-kitoblarini amalga oshirish uchun zarur bo'lgan raqamli ma'lumotlarni aniqlash.
Dastlabki ma'lumotlar:
1. Mexanizmning kinematik diagrammasi.
2. Bog'lanishlarning o'lchamlari va boshqa geometrik parametrlari (lekin faqat mexanizm harakatlanayotganda o'zgarmaydiganlar).
3. Kirish zvenolarining harakat qonunlari (yoki harakat parametrlari, masalan, tahlil uchun tanlangan mexanizm holatida kirish zvenosining burchak tezligi va burchak tezlanishi).
L. V. Assur tasnifiga bo'ysunadigan mexanizmlar uchun kinematik tahlil qilish tartibi tuzilish formulasi bilan belgilanadi: birinchi navbatda, boshlang'ich mexanizmlarning harakat parametrlari topiladi va keyin strukturaviy guruhlar tuzilish formulasida paydo bo'ladigan tartibda topiladi. Bu erda oddiy qoidaga amal qilish kerak: struktura formulasining har qanday elementining kinematikasi ushbu formulada undan oldingi barcha elementlar uchun o'rganilgandan keyingina o'rganilishi mumkin.
Vazifalar:
Mexanizmning bo'g'inlari pozitsiyalari bo'yicha. Nuqtalarning harakat traektoriyalarini aniqlash;
Bog'lanish tezligi yoki mexanizmning alohida nuqtalari bo'yicha;
Bog'lanishlarni yoki mexanizmning alohida nuqtalarini tezlashtirish bo'yicha.
Usullari:
Grafik (yoki grafik va diagrammalar usuli);
Grafik-analitik (yoki tezlik va tezlanishlar rejalari usuli);
Analitik;
Eksperimental.
Grafik kinematik tahlil usuli
Ushbu usulning afzalligi uning ravshanligi va soddaligidir. O'zaro harakatni amalga oshiradigan aloqalarni kinematik tahlil qilish uchun yaxshi. Usulning kamchiligi grafik konstruktsiyalarning aniqligiga bog'liq bo'lgan past aniqlikdir.
Joylashuv muammosi etakchi bo'g'inning turli xil ketma-ket pozitsiyalari bilan tanlangan uzunlik shkalasida mexanizmning bir nechta kombinatsiyalangan rejalarini qurish orqali hal qilinadi.
Ular o'rganilayotgan nuqtaning siljishlari, tezligi va tezlanishlarining grafiklarini (diagrammalarini) qurish orqali hal qilinadi.
Kinematik tahlil ketma-ketligi:
1. Birinchidan, mexanizmning bir nechta (ko'pincha 12 yoki undan ortiq) birlashtirilgan rejalari o'zboshimchalik bilan tanlangan uzunlik shkalasida quriladi.
2. Keyin o'rganilayotgan nuqta yoki zveno yo'li (harakati) grafigi quriladi, buning uchun mexanizmning birlashtirilgan rejalari va o'rganilayotgan nuqta yoki zvenoning ketma-ket pozitsiyalari qo'llaniladi.
3. Ko`chish grafigini grafik differensiallash yo`li bilan o`rganilayotgan nuqta tezligining grafigi quriladi.
4. Tezlik grafigining grafik differensiallanishi tezlanishlar grafigini tuzadi.
Grafik farqlash akkordlar usuli va tangenslar usuli bilan amalga oshirilishi mumkin. Aniqlikni oshirish uchun ikkala usulni bir vaqtning o'zida ishlatish qulay.
1-misol
Krank-slayder mexanizmi berilgan, uning bo'g'inlarining uzunliklari - krank va birlashtiruvchi novda - mos ravishda L OA va L AB va krankning burchak tezligi .
Krankning turli pozitsiyalarida slayderning tezligi va tezlashishini aniqlang.
Yechim.
Biz uzunlik o'lchovlarini tanlaymiz , m/mm, bu erda AO - segmentning uzunligi, mm, qurilayotgan mexanizm rejasida L OA uzunlikdagi krankni tasvirlaydi; bu uzunlik o'zboshimchalik bilan tanlanadi, bunda mexanizmning birlashtirilgan rejalari chizmaning ajratilgan joyiga joylashtirilishi kerak va uzunlik o'lchovining o'zi keyingi hisob-kitoblar uchun qulay bo'ladi.
Mexanizmning rejasida birlashtiruvchi novda tasvirlangan segmentning uzunligini, mm ni hisoblaymiz. Mexanizmning birlashtirilgan rejalarini qurishda ular foydalanadilar serif usuli(3.1-rasm).
Tezlik va tezlanishlar grafiklarini qurish uchun (3.1-rasm) qutb masofalari h u va h a tanlanadi, bunda h u tezliklarni chizishdagi qutb masofasi, u ixtiyoriy uzunlikdan tanlanadi; uning qiymatini h u =30…40 mm ichida tanlash tavsiya etiladi; h a - tezlanishlar grafigini tuzishda qutb masofasi; uni h a \u003d 30 ... 40 mm ichida olish tavsiya etiladi.
Vaqt, tezlik va tezlanish shkalalari formulalar bo'yicha hisoblanadi, ularning hosilasi quyida keltirilgan.
vaqt shkalasi formuladan foydalanib hisoblash mumkin
bu erda T - krankning bir aylanish davri, s; L X - siljishlar grafigi (diagrammasi)dagi 1 va 1 nuqtalar orasidagi segmentning uzunligi, mm.
Chunki T davri formulalar bilan hisoblanishi mumkin
qayerda krankning burchak tezligi, 1/s; n 1 - krank tezligi, rpm, keyin vaqt shkalasi
![]() , s/mm.
, s/mm.
Tezlik shkalasi o'rganilayotgan nuqtaning tezligi vaqtga nisbatan S siljishining hosilasi bo'lishi shartidan kelib chiqishi mumkin:
![]() .
.
Bu erda siljishlar shkalasi va vaqt shkalasi doimiy deb hisoblanadi.
O'shandan beri ![]() , shuning uchun Joylashuv muammosi grafik usulda, ya'ni tanlangan uzunlik masshtabida mexanizmning bir nechta kombinatsiyalangan rejalarini qurish orqali hal qilinadi.
, shuning uchun Joylashuv muammosi grafik usulda, ya'ni tanlangan uzunlik masshtabida mexanizmning bir nechta kombinatsiyalangan rejalarini qurish orqali hal qilinadi.
Tezlik va tezlashtirish bilan bog'liq muammolar mexanizm bo'g'inlarining tezliklari va tezlanishlari uchun oldindan tuzilgan vektor tenglamalari asosida yetakchi bo'g'inning ma'lum (berilgan) pozitsiyalarida mexanizm bo'g'inlarining tezliklari va tezlanishlari rejalarini tuzish yo'li bilan hal qilinadi.
Afzallik Grafik bilan solishtirganda bu usul kamroq vaqt talab etadi, chunki u mexanizmning ko'plab nuqtalari uchun bitta tezlik rejasi yoki tezlashtirish rejasi bo'yicha tezlik va tezlanishlarni (ularning kattaligi va yo'nalishini) aniqlashga imkon beradi.
kamchilik usul shundan iboratki, mexanizmning bir nechta pozitsiyalari uchun tezlik va tezlashtirish rejalarini qurish talab etiladi (agar mexanizm va uning bo'g'inlarining turli pozitsiyalarida tezlik va tezlanishni aniqlash kerak bo'lsa).
Shuni esda tutish kerakki, tekislik-parallel harakat qonunlari tezliklar va tezlanishlar uchun rejalarni tuzish uchun asosdir. Ushbu qonunlarga muvofiq:
1.Tezlik rejasi (shuningdek tezlashtirish rejasi) tekis-parallel harakatdagi nuqtalarning tezliklarini (tezlanishlarini) aniqlash uchun vektor tenglamalarining grafik yechimi natijasida olinadi;
2. Nuqtalarning mutlaq tezliklarining vektorlari (ularning harakatini qo'zg'almas bo'g'inga nisbatan ko'rib chiqilayotganda) rejaning qutbidan chiqayotgan holda tasvirlanadi va yo'nalish harakat traektoriyasining tangenslari bilan mos tushadi. Nuqtalarning nisbiy tezliklari vektorlari (ular harakatlanuvchi nuqtalarga nisbatan harakat qilganda) mutlaq tezliklarning mos vektorlari uchlarini birlashtiruvchi segmentlar bilan ifodalanadi;
3. Nisbiy tezlik vektorlarining uzunligi ularning nisbiy harakatida nuqtalarning aylanish radiusi bo'lgan bog'lanish qismlarining uzunligiga proportsionaldir. O'xshashlik teoremasi deb nomlanuvchi ushbu qoida tekislik-parallel va aylanma harakat bog'lanishlarida joylashgan ko'plab nuqtalarning tezligini aniqlashga yordam beradi.
Bu uchburchakning tezlik rejasi.
Qattiq ulanish tezligi rejasi- zvenoning istalgan nuqtalarining mutlaq tezlik vektorlari uchlari nuqtalarining joylashuvi, agar ular bitta umumiy nuqtadan qurilgan bo'lsa, tezlik rejasining qutbi deb ataladi.
Tezlik rejasi har doim masshtabga qarab tuziladi. "Mashina va mexanizmlar nazariyasi" fanida masshtab o'lchovga ega, shuning uchun uni keng tarqalgan masshtab koeffitsienti deyiladi: , .
Tezlik rejasi bog'lanishning o'ziga o'xshaydi va lahzali aylanish yo'nalishi bo'yicha to'qson daraja aylantiriladi.
Agar qattiq zvenoning tezlik rejasi uning zvenosiga o'xshash bo'lsa, unda mexanizmning tezlik rejasi mexanizmning o'ziga o'xshamaydi, chunki qattiq bog'lanishdan farqli o'laroq, mexanizm o'zgaruvchan harakatlanuvchi tizimdir.
Vites tezligi rejasi- tezlik rejasining qutbi deb ataladigan, bitta umumiy nuqtadan qurilgan, alohida bo'g'inlarning tezlik rejalari to'plami.





