A doua condiție pentru echilibrul corpului. Condiții de echilibru pentru un corp rigid
Sistemul de forţe numit. echilibrat, daca sub actiunea acestui sistem organismul ramane in repaus.
Conditii de echilibru:
Prima condiție de echilibru corp solid:
Pentru echilibrul unui corp rigid, este necesar ca suma forțe externe aplicat pe corp a fost egal cu zero.
A doua condiție pentru echilibrul unui corp rigid:
Când un corp rigid este în echilibru, suma momentelor tuturor forțelor externe care acționează asupra lui în jurul oricărei axe este egală cu zero.
Condiție generală de echilibru pentru un corp rigid:
Pentru echilibrul unui corp rigid, suma forțelor exterioare și suma momentelor forțelor care acționează asupra corpului trebuie să fie egală cu zero. Viteza inițială a centrului de masă și viteza unghiulară de rotație a corpului trebuie să fie, de asemenea, egale cu zero.
Teorema. Trei forțe echilibrează un corp rigid numai dacă toate se află în același plan.
11. Sistem plat de forțe sunt forțe în același plan.
Trei forme de ecuații de echilibru pentru un sistem plat:
Centrul de greutate al corpului.
centrul de greutate corpurile de dimensiune finită se numesc punct, în raport cu care suma momentelor de greutate a tuturor particulelor corpului este egală cu zero. În acest moment, se aplică forța de gravitație a corpului. Centrul de greutate al unui corp (sau al unui sistem de forțe) coincide de obicei cu centrul de masă al corpului (sau al sistemului de forțe).
Centrul de greutate al unei figuri plate:
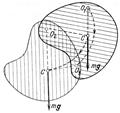
O modalitate practică de a găsi centrul de masă al unei figuri plane: atârnă corpul în câmpul gravitațional astfel încât să se poată roti liber în jurul punctului de suspensie O1 . Centrul de masă în echilibru DIN se află pe aceeași verticală cu punctul de suspensie (sub el), deoarece este egal cu zero
momentul de greutate, care poate fi considerat aplicat la centrul de masă. Schimbând punctul de suspensie, la fel găsim o altă linie dreaptă Aproximativ 2 C , trecând prin centrul de masă. Poziția centrului de masă este dată de punctul de intersecție a acestora.
Viteza centrului de masă:
Momentul unui sistem de particule este egal cu produsul masei întregului sistem M= Σmi la viteza centrului său de masă V :
![]()
Centrul de masă caracterizează mișcarea sistemului ca întreg.
15. Frecare de alunecare- frecarea in timpul miscarii relative a corpurilor de contact.
Frecarea repausului– frecare în absenţa mişcării relative a corpurilor de contact.
forța de frecare de alunecare Ftr între suprafețele corpurilor în contact în timpul mișcării lor relative depinde de forța reacției normale N , sau din forța presiunii normale PN , și Ftr=kN sau Ftr=kPn , unde k – coeficientul de frecare de alunecare , care depinde de aceiași factori ca și coeficientul de frecare static k0 , precum și asupra vitezei mișcării relative a corpurilor în contact.
16. Frecare de rulare este rostogolirea unui corp peste altul. Forța de frecare de alunecare nu depinde de mărimea suprafețelor de frecare, ci doar de calitatea suprafețelor corpurilor de frecare și de forța care reduce suprafețele de frecare și este îndreptată perpendicular pe acestea. F=kN, Unde F- forța de frecare, N este valoarea reacției normale și k este coeficient de frecare de alunecare.
17. Echilibrul corpurilor în prezența frecării- aceasta este forta maxima de aderenta proportionala cu presiunea normala a corpului in plan.
Unghiul dintre reacția totală, construită pe cea mai mare forță de frecare pentru o reacție normală dată, și direcția reacției normale se numește unghi de frecare.
Un con cu un vârf în punctul de aplicare a reacției normale a unei suprafețe rugoase, a cărui generatoare face unghiul de frecare cu aceasta reacție normală, se numește con de frecare.
Dinamica.
1. LA dinamica se are în vedere influenţa interacţiunilor dintre corpuri asupra mişcării lor mecanice.
Greutate- aceasta este pictura caracteristică unui punct material. Masa este constantă. Greutatea este aditivă (se adună)
Putere - acesta este un vector care caracterizează complet interacțiunea unui punct material de pe acesta cu alte puncte materiale.
Punct material- un corp, ale cărui dimensiuni și formă sunt nesemnificative în mișcarea avută în vedere (ex: în mișcarea de translație, un corp rigid poate fi considerat un punct material)
sistem de material puncte numite Multe puncte materiale interacționând între ele.
1 Legea lui Newton: orice punct material menține o stare de repaus sau o mișcare rectilinie uniformă până când influențele externe schimbă această stare.
Legea a 2-a a lui Newton: accelerația dobândită de un punct material în sistem inerțial referință, direct proporțională cu forța care acționează asupra punctului, invers proporțională cu masa punctului și coincide în direcție cu forța: a=F/m
a 3-a lege a lui Newton: forțele de interacțiune a două puncte materiale dintr-un cadru de referință inerțial sunt egale în valoare absolută și direcționate în direcții opuse : Fik= - Fki
În statică, precum și în cinematică (n° 51), un sistem de puncte materiale, invariabil legate între ele, se numește corp rigid. Acest sistem este, așadar, un corp absolut rigid, ale cărui puncte rămân la distanțe constante unele de altele, oricare ar fi forțele care acționează asupra acestor puncte și oricare ar fi mișcarea corpului.
Corpul astfel definit este, desigur, o idealizare. În primul rând, fizica ne învață că solidele sunt compuse din molecule, care ele însele au o structură foarte complexă și pot fi într-o mare varietate de mișcări ascunse. Este vorba despre molecule luate în pozițiile lor de mijloc cu care se poate spune că rămân într-o mare măsură aproximări pe aceeași
aceleași distanțe unul față de celălalt. Astfel, putem privi aici doar moleculele din pozițiile lor mijlocii ca puncte materiale. Dar asta nu este tot; chiar dacă neglijăm mișcările moleculare ascunse și acordăm atenție doar mișcărilor vizibile ale particulelor, atunci și atunci toate corpurile naturii își schimbă forma sub acțiunea forțelor aplicate acestora; de aceste deformaţii depind, după cum ştim (n° 109), forţele interne care acţionează între particulele aceluiaşi corp. Totuși, întrucât deformațiile corpurilor numite „solide” în fizică sunt foarte mici, ele pot fi neglijate în prima aproximare, cu excepția cazului în care forțele aplicate corpurilor sunt prea mari și dacă nu studiem forțe interne. Determinarea forțelor interne și a deformațiilor aparente care apar în solide este o sarcină dificilă, care nu mai ține de statică, ci de teoria elasticității. Teoria pe care o vom prezenta este aplicabilă solidelor cu o precizie mai mare. corpuri fizice cu atât se apropie mai mult de un corp perfect rigid.
Din punct de vedere logic, statica geometrică a unui corp rigid ar trebui considerată ca teoria limitei. Ea pornește număr cunoscut legi generale aplicabile tuturor solidelor, oricare ar fi structura lor moleculară și proprietățile lor elastice, dacă doar deformațiile pot fi considerate infinit de mici. Totuși, teoria astfel construită este o teorie incompletă a echilibrului, deoarece lasă deoparte în mod sistematic proprietățile elastice, a căror implicare devine în unele cazuri absolut necesară. În aceste cazuri, metodele staticii geometrice se dovedesc a fi insuficiente pentru a rezolva toate întrebările pe care problema echilibrului ni le poate pune. Unele dintre aceste întrebări se pot dovedi chiar contradictorii, dacă se reține ipoteza imuabilității absolute a unui corp rigid.
O condiție de nedeformabilitate nu este suficientă pentru a fundamenta teoria echilibrului solidelor;
la aceasta trebuie adăugat, ca supliment la definiția unui corp rigid, următorul postulat mecanic:
postulat. - Fără a schimba nimic în condițiile de echilibru ale unui corp rigid, se pot adăuga sau scădea două forțe egale și direct opuse aplicate la două dintre punctele sale.
Acest postulat ar putea fi derivat dintr-un principiu general cunoscut sub numele de principiul deplasărilor virtuale, dar nu vom face acest lucru deocamdată. Vom stabili principiul menționat într-unul din capitolele următoare ca fundament al staticii analitice. De asemenea, ar fi inutil să introducem acest postulat dacă acceptăm legile de bază ale dinamicii în forma în care le-am prezentat în partea anterioară a cursului, deoarece postulatul luat în considerare, după cum vom vedea mai târziu, este un simplu caz special unu teorema generala dinamica corpului rigid. Dacă o introducem aici, o facem pentru a păstra caracterul unei discipline independente în spatele staticului. Vom privi acest postulat, din punctul de vedere al fizicii, ca o consecință directă a experienței; din acelasi punct de vedere mecanică teoretică o vom considera ca pe o completare la definitia unui corp solid adoptata in statica, cu avantajul ca suntem eliberati de introducerea ipotezei moleculare.
După cum sa menționat deja în teoria vectorilor (§ 28), acest postulat de bază implică următoarea propoziție ca urmare:
Fără a încălca condițiile de echilibru ale unui corp rigid, se poate transfera punctul de aplicare al forței într-un punct arbitrar pe linia sa de acțiune, cu condiția ca acest nou punct să fie conectat cu corpul.
Este de la sine înțeles că această propoziție se referă doar la starea de echilibru a corpului, și nu la acele acțiuni pe care diferitele puncte ale corpului le exercită unele asupra altora, deoarece aceste acțiuni interne, desigur, se vor schimba atunci când punctul de aplicare a forța indicată se modifică.
operatia poate fi efectuata, de exemplu, atunci cand pe niste suporti este asezat un corp rigid, dar in nici un caz nu se poate sustine ca transferul de forta in acest caz nu va modifica reactiile suporturilor. Prin urmare, ar fi o mare greșeală să se aplice principiul transferului de forță în determinarea reacțiilor suporturilor, transferând, de exemplu, una sau alta dintre forțele aplicate la punctul de sprijin. Singurele condiții care se pot aplica în mod legitim în acest caz sunt condițiile generale de echilibru, deoarece acestea din urmă sunt întotdeauna condiții necesare.
185. Reducerea forțelor aplicate unui corp rigid (punct de vedere static).
Tocmai am văzut că este posibil, fără a perturba echilibrul unui corp rigid, să se efectueze următoarele operații asupra forțelor aplicate punctelor corpului:
1°. Adăugarea sau extinderea forțelor aplicate la un punct.
2°. Adunarea sau scăderea a două forțe egale și direct opuse.
3°. Transferul de forță într-un punct arbitrar pe linia sa de acțiune.
Aceste operații, așa cum a fost stabilit în teoria vectorilor (Sec. 29), sunt tocmai acele operații elementare care fac posibilă aducerea a două sisteme echivalente de vectori între ele. Din aceasta obținem următoarea teoremă:
Fără a încălca echilibrul unui corp rigid, este posibil să înlocuim orice sistem de forțe aplicat corpului cu un alt sistem de forțe, care este un sistem de vectori echivalent cu primul.
Astfel de două sisteme de forțe se numesc echivalente.
Problema reducerii unui sistem de forțe aplicate unui corp rigid coincide astfel cu problema reducerii unui sistem de vectori, astfel încât putem trage următoarele concluzii:
1°. Reducere la două forțe. Sistemul de forțe aplicate unui corp rigid poate fi redus,
dezechilibru, numai la două forțe, dintre care una este aplicată într-un punct al corpului ales în mod arbitrar (n ° 26).
2°. Reducere la putere și la un cuplu. Sistemul de forțe aplicate unui corp rigid poate fi redus, fără a se rupe echilibrul, la o forță aplicată într-un punct arbitrar O al corpului și la o pereche. Forța este rezultanta R a tuturor forțelor sistemului transferate în punctul O ( vector principal), iar momentul perechii este egal cu momentul principal O al sistemului de forțe față de același punct (n ° 24).
Pentru ca sistemul de forțe să fie redus la o rezultantă R, este necesar și suficient ca, pentru un centru de reducere O luat în mod arbitrar, suma geometrică R să fie diferită de zero, iar momentul rezultat G (dacă nu este egal cu zero) este perpendicular pe R. Rezultanta este îndreptată în acest caz de-a lungul axei centrale a sistemului.
Pentru ca sistemul să fie redus la o pereche, este necesar și suficient ca vectorul principal R să fie egal cu zero, iar momentul principal O să fie diferit de zero. În acest caz, momentul principal al sistemului este același pentru fiecare punct din spațiu.
În cele din urmă, dacă vectorii R și G sunt ambii nuli, atunci sistemul este echivalent cu zero, iar corpul va fi în echilibru. Vom analiza acest caz în secțiunea următoare.
Forțele într-un avion. - Când toate forțele acționează în același plan, iar suma lor geometrică R nu este egală cu zero, momentul rezultat G (precum și momentul fiecărei forțe) este perpendicular pe R. Prin urmare, aceste forțe se reduc la o rezultantă R aplicat în punctul axei centrale (aflat, evident, în planul de acţiune al forţelor). Dacă R este egal cu zero, atunci sistemul este redus la o pereche, iar dacă, în plus, G este egal cu zero, atunci sistemul este în echilibru.
Este util de observat că orice sistem plat de forțe poate fi întotdeauna redus la două forțe, adj. în două puncte date A și planul,
Într-adevăr, fiecare forță t aplicată într-un punct O, care se află în afara dreptei AB, este descompusă, pe direcțiile OA și OB, în două componente care pot fi transferate în punctele A și B. Dacă punctul O al aplicării forței se află pe AB și linia în care acțiunea forței trece prin A, atunci punctul de aplicare al forței poate fi transferat dacă linia de acțiune a forței nu trece prin A, atunci punctul de aplicare al forței poate fi transferat de-a lungul liniei de acțiune dincolo de linia dreaptă AB, care duce la primul caz.
forțe paralele. - Dacă forțele sunt paralele, iar suma lor geometrică R nu este egală cu zero, atunci momentul rezultat G este perpendicular pe R și, prin urmare, aceste forțe se reduc la un rezultat R aplicat într-un punct al axei centrale (paralel). la direcţia generală a forţelor). Dacă R este egal cu zero, atunci sistemul este redus la o pereche sau este în echilibru (când momentul perechii este egal cu zero).
186. Echilibrul unui corp rigid.
Pentru echilibrul unui corp rigid liber, este necesar și suficient ca sistemul de forțe aplicat acestuia (adică, în acest caz, forțe externe) să fie echivalent cu zero.
Știm deja că această condiție este necesară, deoarece este o condiție de echilibru general.
Pentru un corp rigid, de asemenea, se dovedește a fi suficient. Într-adevăr, dacă un sistem de forțe este echivalent cu zero, acesta poate fi redus la zero prin operații elementare și, prin urmare, se pot elimina pur și simplu toate forțele care îl compun. Pe baza acestui lucru, avem două condiții de echilibru sub formă vectorială
Aceste condiții se descompun în șase ecuații algebrice. Fie X, Y, Z proiecțiile vectorului R pe trei axe de coordonate dreptunghiulare sau suma proiecțiilor tuturor forțelor pe aceeași axă; mai departe L, M,
Momentele rezultate ale sistemului acestor forțe pe aceleași axe; atunci aceste șase ecuații vor fi:
Se spune adesea că primele trei ecuații (echivalente cu R = 0) sunt condițiile de echilibru pentru mișcare înainte, iar ultimele trei (echivalente cu egalitatea G = 0) sunt condițiile de echilibru pentru rotație. Vom obține baza pentru astfel de nume mai târziu, când aplicăm principiul muncii virtuale la soluționarea aceleiași probleme.
187. Reducerea forțelor aplicate unui corp rigid (din punct de vedere dinamic). echilibru dinamic.
În dinamica unui corp rigid, vom arăta că în cazul unui corp rigid liber, mișcarea acestuia va fi complet determinată dacă pentru fiecare moment de timp vectorul principal și momentul principal relativ la un punct al tuturor forțelor aplicate acestuia. sunt date. Prin urmare, avem următoarea teoremă:
Dacă două sisteme de forțe aplicate unui corp rigid sunt constant echivalente între ele din punctul de vedere al teoriei vectorilor, atunci vor fi echivalente din punctul de vedere al mișcării corpului.
Această teoremă este în esență legată de dinamică, dar este și strâns legată de statica geometrica. Într-adevăr, se poate dovedi printr-o foarte simplă generalizare a postulatului de bază, care rafinează definiția unui corp rigid în statică (n° 184).
Într-adevăr, înlocuim acest postulat cu următorul:
Fără a schimba nimic în starea de repaus sau de mișcare a unui corp rigid, se pot adăuga sau scădea două forțe egale și direct opuse aplicate în două puncte ale corpului.
Acest postulat mai general, care poate fi verificat și direct prin experiență, ne permite să dăm următoarele
aceeași generalizare a conceptului de reducere și echivalență a forțelor. Într-adevăr, în toate propozițiile § 185, cuvintele „fără a perturba echilibrul” pot fi înlocuite cu cuvintele „fără a schimba nimic în starea de odihnă sau de mișcare a corpului”. Atunci concluzia nr. 185 se dovedește a fi echivalentă cu principiul dinamic enunțat aici.
În special, notăm un corolar:
Dacă un corp rigid sub acțiunea unui sistem de forțe S rămâne în echilibru, atunci acest sistem de forțe (fiind echivalent cu zero) nu poate schimba nimic nici în starea de mișcare a corpului, dacă acesta din urmă nu mai este în repaus.
Acum este perfect firesc să stabilim următoarea definiție:
Un anumit sistem de forțe este în echilibru din punct de vedere al dinamicii sau în echilibru dinamic dacă forțele nu pot schimba starea de repaus sau de mișcare a corpului rigid căruia îi sunt aplicate.
Cu această definiție, putem face următoarea propoziție:
Pentru ca forțele aplicate unui corp rigid să fie în echilibru dinamic, este necesar și suficient ca acestea să reprezinte un sistem de vectori echivalent cu zero.
Acest mod de reprezentare a echilibrului de forțe aplicat unui corp rigid este foarte răspândit, iar cuvântul „echilibru” este foarte des folosit în acest sens. Cu toate acestea, nu trebuie să pierdem din vedere faptul că o astfel de idee de echilibru se referă mai mult la dinamică decât la statică.
188. Centrul de greutate al unui corp rigid.
Reducerea forțelor aplicate unui corp rigid poate fi efectuată, în special, pentru forțele de greutate ale tuturor punctelor materiale din care constă corpul. Toate aceste înghițituri sunt forțe paralele, orientat în mod egal. Acest sistem de vectori este deci redus la o rezultanta egala cu greutatea totala P a corpului rigid si aplicat in centrul acestor vectori paraleli, care
vom nota G. Acest punct, a cărui poziţie în corp nu depinde de orientarea sa faţă de suprafaţa Pământului, este centrul de greutate al corpului. Vom vedea în capitolul următor cum îi putem determina coordonatele. Din teoremele anterioare rezultă că acțiunea gravitației asupra diferitelor puncte ale unui corp rigid, atât din punct de vedere static, cât și din punct de vedere dinamic, se reduce la o singură forță, la greutatea totală aplicată la centrul de greutate al corpului.
Știați, Care este falsitatea conceptului de „vid fizic”?
vid fizic - conceptul de relativist fizică cuantică, este înțeles acolo ca starea de energie cea mai scăzută (de bază) a câmpului cuantificat, care are moment zero, moment unghiular și alte numere cuantice. Teoreticienii relativiști numesc vidul fizic un spațiu complet lipsit de materie, plin cu un câmp nemăsurabil și, prin urmare, doar un câmp imaginar. O astfel de stare, potrivit relativiștilor, nu este un vid absolut, ci un spațiu plin cu niște particule fantomă (virtuale). Relativistă teoria cuantica Field susține că, în conformitate cu principiul incertitudinii Heisenberg, particulele virtuale se nasc și dispar în mod constant în vidul fizic, adică particule aparente (cui i se pare?): apar așa-numitele oscilații în punctul zero ale câmpurilor. Particulele virtuale ale vidului fizic și, prin urmare, ele însele, prin definiție, nu au un cadru de referință, deoarece, altfel, principiul relativității lui Einstein, pe care se bazează teoria relativității, ar fi încălcat (adică o măsurare absolută). ar deveni posibil un sistem cu o referință de la particulele vidului fizic, care, la rândul său, ar respinge fără echivoc principiul relativității, pe care este construit SRT). Astfel, vidul fizic și particulele sale nu sunt elemente ale lumii fizice, ci doar elemente ale teoriei relativității care nu există în lumea reală, ci doar în formule relativiste, încălcând principiul cauzalității (acestea apar și dispar fără motiv), principiul obiectivității (particulele virtuale pot fi considerate, în funcție de dorința teoreticianului, fie existente, fie inexistente), principiul măsurabilității efective (neobservabile, nu au ISO propriu).
Când unul sau altul fizician folosește conceptul de „vid fizic”, fie nu înțelege absurditatea acestui termen, fie este viclean, fiind un adept ascuns sau evident al ideologiei relativiste.
Este mai ușor de înțeles absurditatea acestui concept făcând referire la originile apariției sale. S-a născut de Paul Dirac în anii 1930, când a devenit clar că negația eterului în forma sa pură, așa cum a făcut un mare matematician, dar un fizician mediocru, nu mai este posibilă. Prea multe fapte contrazic acest lucru.
Pentru a apăra relativismul, Paul Dirac a introdus conceptul afizic și ilogic al energiei negative, iar apoi existența unei „mări” a două energii care se compensează reciproc în vid – pozitiv și negativ, precum și o „mare” de particule care se compensează reciproc. - electroni virtuali (adică aparenti) și pozitroni în vid.





