I.2.1 Prima lege a lui Newton. sisteme de referință inerțiale
Corp (punct material) , care nu este supus influențelor externe, este fie în repaus, fie se mișcă în linie dreaptă și uniform. Un astfel de corp este numit gratuit. Mișcarea unui astfel de corp se numește mișcare liberă sau inerţie.
Există un cadru de referință în care toate corpurile libere se mișcă în linie dreaptă și uniform
Există astfel de cadre de referință, numite inerțiale, față de care un punct material, în absența influențelor exterioare, păstrează mărimea și direcția vitezei sale la nesfârșit.
Se numesc astfel de sisteme sisteme de referință inerțiale - Prima lege a lui Newton.
A doua lege a lui Newton
Orice corp rezistă atunci când încearcă să-l pună în mișcare, adică. da-i putina viteza. Această proprietate a corpurilor se numește inerţie. Măsura inerției - greutate.
Se numește un sistem de corpuri care nu este influențat de alte corpuri sistem închis sau sistem izolat. În astfel de sisteme, corpurile pot interacționa doar între ele sistem închis este format din două corpuri (două puncte materiale). Viteza corpurilor și , și creșterea acestor viteze pentru aceeași perioadă de timp. Vectorii și au direcții opuse și sunt legați prin relație ![]() . Coeficienții și sunt constanți și au semne identiceși se numesc mase sau mase inerțiale ale corpurilor 1 și 2.
. Coeficienții și sunt constanți și au semne identiceși se numesc mase sau mase inerțiale ale corpurilor 1 și 2.
Puls sau cantitatea de mișcare a unui punct material- un vector egal cu produsul dintre masa unui punct și viteza acestuia.
Momentul sistemului - suma vectoriala impulsurile punctelor materiale individuale care alcătuiesc sistemul: ![]() pentru un sistem format din puncte materiale.
pentru un sistem format din puncte materiale.
Puls sistem izolat rămâne constantă în timp Legea conservării impulsului.
Putere (la mecanica)- orice motiv care modifică impulsul corpului (aceasta este o caracteristică calitativă). Caracteristica cantitativă se exprimă prin ecuația:
![]()
Această ecuație este valabilă numai dacă m nu depinde de viteza.
Într-un cadru de referință inerțial, derivata impulsului unui punct material în raport cu timpul este egală cu forța care acționează asupra acestuia.
Într-un cadru de referință inerțial, accelerația pe care o primește un punct material este direct proporțională cu rezultanta tuturor forțelor aplicate acestuia și invers proporțională cu masa sa.
Afirmațiile de mai sus nu sunt altceva decât două formulări A doua lege a lui Newton. Ecuația corespunzătoare definiției legii este ecuația de mișcare a unui punct material.
a treia lege a lui Newton
Forțele de interacțiune a două puncte materiale sunt egale ca mărime, direcționate opus și acționează de-a lungul liniei drepte care leagă aceste puncte materiale.
Pentru fiecare acțiune există o reacție egală și opusă.
Punctele materiale acţionează unul asupra celuilalt în perechi cu forţe de aceeaşi natură, îndreptate de-a lungul dreptei care leagă aceste puncte, egale ca valoare absolută şi opusă ca direcţie: . Sau, dacă sistemul constă dintr-un set de puncte materiale, atunci , i.e. punctele materiale interacţionează în perechi. Ambele forțe sunt direcționate de-a lungul liniei drepte care leagă aceste puncte.
Aceste trei expresii sunt formulări diferite a treia lege a lui Newton.
Orice sistem care se deplasează cu accelerație în raport cu un cadru de referință inerțial este neinerțială.
I.2.1 PRIMA LEGEA LUI NEWTON. SISTEME DE REFERINȚĂ INERTIALĂ.
Prima lege a lui Newton: orice corp își păstrează starea de repaus sau de mișcare rectilinie uniformă până când o influență externă îl forțează să schimbe această stare.
Prima lege a lui Newton spune că starea de repaus sau mișcarea rectilinie uniformă nu necesită influențe externe pentru a o menține. Aceasta manifestă o proprietate dinamică specială a corpurilor, numită inerţie . În consecință, prima lege a lui Newton se mai numește legea inerției , iar mișcarea unui corp liber de influențe externe este inerţie .
În formularea de mai sus a primei legi a lui Newton, este subînțeles că corpul nu este deformat, i.e. absolut solid, și că în absența influențelor externe, merge înainte. În plus, un corp rigid se poate roti uniform prin inerție. Dacă în prima lege a lui Newton vorbim nu despre un „corp”, ci despre un punct material, care, prin însăși definiția sa, nu poate fi deformat sau rotit, atunci necesitatea tuturor acestor rezerve dispare. Având în vedere toate cele de mai sus, putem da următoarea formulare a acestei legi: există astfel de cadre de referință, numite inerțiale, în raport cu care un punct material, în absența influențelor exterioare, reține mărimea și direcția vitezei sale la nesfârșit. Legea este valabilă și într-o situație în care sunt prezente influențe externe, dar compensate reciproc (aceasta rezultă din legea a 2-a a lui Newton, deoarece forțele compensate conferă corpului accelerație totală zero).
Faptul că corpul rămâne în repaus (adică menține o viteză egală cu zero) până când un alt corp acționează asupra lui este destul de înțeles și este confirmat de observațiile de zi cu zi. Piatra în sine nu se va clinti până nu este mutată de cineva sau de ceva. Dar ne este greu să credem că un corp poate menține pentru totdeauna o mișcare uniformă și rectilinie. O piatră aruncată experimentează rezistența aerului și atracția față de pământ. Dacă aceste influențe nu ar exista, corpul ar păstra starea de mișcare uniformă și rectilinie (adică, ar păstra mărimea și direcția vitezei sale). Sau un alt exemplu, după ce a alergat, o persoană nu se poate opri instantaneu sau se poate întoarce instantaneu în lateral. Pentru a ocoli un stâlp în fugă, o persoană îl apucă instinctiv cu mâna, adică. recurge la influenţa altui corp (stâlp) pentru a schimba direcţia vitezei sale.
I.2.2 PUTEREA
Cu forta numit vector cantitate fizica, care este o măsură a impactului asupra unui punct sau corp material de la alte corpuri sau câmpuri.
O formă specială de materie care leagă particulele de materie în sisteme unice și transferă acțiunea unor particule altora cu o viteză finită se numește câmp fizic.
Câmpul care acționează asupra unui punct material cu o forță se numește câmp staționar, dacă nu se modifică în timp, i.e. dacă în orice punct al câmpului
Interacțiunea dintre corpurile îndepărtate se realizează prin intermediul câmpurilor gravitaționale și electromagnetice.
Interacțiune gravitațională- ia naștere între corpuri în conformitate cu legea gravitației universale.
Interacțiune electromagnetică - apare între corpuri sau particule care au sarcini electrice.
În plus, există și interacțiune puternică, care există, de exemplu, între particulele care alcătuiesc nucleele atomilor și interacțiune slabă caracterizarea, de exemplu, a proceselor de transformare a unor particule elementare.
Problemele mecanicii iau în considerare forte gravitationale (forta gravitationala) și două tipuri de forțe electromagnetice - forte elasticeși forte de frecare.
Se numesc forțele de interacțiune dintre părțile unui sistem considerat de corpuri forțe interne.
Se numesc forțele de influență asupra corpurilor unui anumit sistem de la alte corpuri care nu sunt incluse în acest sistem forțe externe.
Agregat corpuri fizice, în care interacțiunile cu corpurile externe sunt absente sau compensate, se numește închis(izolat) sistem.
O forță este complet definită dacă sunt date modulul, direcția și punctul ei de aplicare. Linia de-a lungul căreia este direcționată forța se numește linie de forţă.
Acțiunea simultană a mai multor forțe ( , …, ) asupra unui punct material este echivalentă cu acțiunea unei forțe, numită rezultanta sau rezultând forță și egală cu suma lor geometrică:
Formula (I.48) este principiul suprapunerii fortelor.
TIPURI DE FORȚE ÎN NATURĂ
Cele mai simple tipuri de forțe sunt cele care se datorează direct acţiunea mecanică a unui corp asupra altuia atunci când acestea intră în contact, acestea includ: forțe de tracțiune, frecare, presiune, elasticitate, tensiune.
Să ne oprim doar la unele dintre ele.
Forțe de elasticitate. Forțele care decurg din deformarea elastică a corpurilor se numesc forte elastice . Aceste forțe acționează între straturile de contact ale corpului deformabil, precum și în punctul de contact dintre corpul deformabil și corpul care provoacă deformarea.

De exemplu, din partea unei plăci deformate elastic, o bară care se află pe ea (Fig. 25) este afectată de o forță elastică. Forțele elastice sunt forțe de natură electromagnetică.
Se numește forța elastică care acționează asupra corpului considerat în această problemă din partea suportului sau suspensiei susține forța de reacție(suspensie) sau forța de tensionare a suspensiei. Pe fig. 26 prezintă exemple de aplicare a forțelor de reacție a sprijinului (forța) și a forței de tensiune a suspensiei (forța) asupra corpurilor.
Forța elastică depinde doar de modificarea distanțelor dintre părțile care interacționează ale unui corp elastic dat. Lucrul forței elastice nu depinde de forma traiectoriei și este egal cu zero atunci când se deplasează pe o traiectorie închisă. Prin urmare, forțele elastice sunt forțe potențiale (conceptul de muncă şi potenţialitatea forţelor vor fi luate în considerare în capitol I.3 (§ I.3.1, p. 41), (§ I.3.2, p. 45)).
Legea lui Hooke: forța elastică este proporțională cu vectorul de alungire (compresie) și opusă acestuia în direcție:
![]() , (I.49)
, (I.49)
Unde - rigiditatea corpului- valoarea determinată de forța elastică rezultată dintr-o singură deformare a unui corp dat;
Vectorul de alungire este o valoare care caracterizează tensiunea (compresia) unidimensională (liniară).
Forțele de frecare. Cu orice mișcare a unui corp pe suprafața altuia, apare rezistență la această mișcare, pe care ne-o imaginăm ca fiind forța de frecareîmpotriva acestei mișcări.
Distingeți frecarea externă și cea internă. frecarea externă numită rezistență mecanică care decurge din mișcarea relativă a două corpuri aflate în contact în planul contactului lor. De exemplu, există frecare externă între o bară și plan înclinat pe care se sprijină bara sau din care alunecă. În anumite condiții, frecarea externă se transformă în frecare internă, la care nu există un salt de viteză în zona de contact la trecerea de la un corp la altul.
Frecarea dintre suprafețele a două corpuri solide aflate în contact în absența unui strat lichid sau gazos între ele se numește frecare uscată. Frecarea intre suprafata corp solid iar mediul înconjurător lichid sau gazos în care se mișcă corpul se numește lichid sau frecare vâscoasă.
Frecarea uscată este împărțită în:
§ frecare statică– frecare în absenţa mişcării relative a corpurilor de contact;
§ frecare de alunecare- frecarea in timpul miscarii relative a corpurilor de contact.
Se numește forța de frecare care împiedică mișcarea unui corp pe suprafața altuia forța de frecare statică.
De obicei, când se vorbește despre forța de frecare statică, ele înseamnă forța finală a frecării statice. Se notează printr-o forță externă aplicată unui corp în contact cu un alt corp. Această forță este paralelă cu planul de contact. Mișcarea relativă a corpului are loc în această condiție ![]() . Forța de frecare statică este cauzată de angajarea suprafețelor neuniforme ale corpurilor, deformațiile elastice ale acestor neregularități și aderența (lipirea) corpurilor în acele locuri în care distanțele dintre particulele lor sunt mici și suficiente pentru apariția atracției intermoleculare. În acest sens, forța de frecare statică poate fi considerată ca un fel de manifestare a forțelor elastice.
. Forța de frecare statică este cauzată de angajarea suprafețelor neuniforme ale corpurilor, deformațiile elastice ale acestor neregularități și aderența (lipirea) corpurilor în acele locuri în care distanțele dintre particulele lor sunt mici și suficiente pentru apariția atracției intermoleculare. În acest sens, forța de frecare statică poate fi considerată ca un fel de manifestare a forțelor elastice.
S-a stabilit experimental că forța maximă de frecare statică () nu depinde de aria de contact a corpurilor și este aproximativ proporțională cu modulul forței normale de presiune (), presând suprafețele de frecare una pe cealaltă: .
Factorul adimensional se numește coeficient de frecare static. Depinde de natura și starea suprafețelor de frecare.
Frecarea de alunecare se datorează rugozității suprafețelor de frecare. Forțele interacțiunii intermoleculare joacă, de asemenea, un rol important.
Legile frecării de alunecare.
eu. Raportul dintre forța de frecare și forța de presiune (acestea. la forța care apasă una pe cealaltă frecând suprafețele) există o valoare constantă pentru aceste suprafeţe.
Prima lege a frecării poate fi formulată după cum urmează: forța de frecare este direct proporțională cu forța de presiune.
S-a demonstrat experimental că forța de frecare de alunecare este proporțională cu forța presiunii normale: ![]() .
.
II. Coeficientul de frecare depinde de materialele suprafețelor de frecare.
III. Coeficientul de frecare nu depinde de mărimea suprafețelor de frecare. Dacă suprafața este foarte mică, astfel încât un corp în mișcare poate lăsa o zgârietură pe unul staționar (de exemplu, vârful unui cui), atunci această lege nu mai este valabilă.
IV. Coeficientul de frecare scade odata cu cresterea vitezei. Acest lucru se explică prin faptul că, la viteze mari, nu toate proeminențele suprafețelor aspre au timp să se lipească una de cealaltă suficient de adânc.
Figura 27 prezintă un grafic al dependenței coeficientului de frecare de viteza de mișcare.
 |
Din grafic se poate observa că cel mai mare coeficient de frecare (deci, cea mai mare forță de frecare) există în repaus. Acest lucru este exprimat pe scurt după cum urmează: valoarea maximă a forței de frecare statică este mai mare decât forța de frecare de alunecare. Legile I, II și III au fost găsite de Coulomb din experimente cu un tribometru.
Notă:în cele mai simple cazuri, forța de frecare și forța normală de presiune sunt legate de inegalitatea , care devine egală numai în prezența mișcării relative. Acest raport se numește
Cuvântare prima lege Newton , a cărui bază experimentală a fost creată prin experimente, Galileea, în 1636, s-a schimbat de mai multe ori, dar esența ei a rămas aceeași. În prezent sunt utilizate două formulări ale acestei legi. Cel mai frecvent utilizat este următorul:
Există astfel de cadre de referință în raport cu care un corp în mișcare progresivă își menține viteza constantă dacă niciun alt corp nu acționează asupra lui sau acțiunea altor corpuri este compensată.
Prima lege a lui Newton este formulată diferit.
Corpul menține o stare de repaus sau o mișcare rectilinie uniformă până când este supus unei acțiuni necompensate din partea altor corpuri sau câmpuri fizice.
Sensul fizic: 1) Legea prevede ce se va întâmpla cu organismul dacă acesta nu este afectat de alte organe sau acţiunea altor organe este compensată. 2) Dintre toate cadrele de referință, prima lege a lui Newton le evidențiază pe cele în care este îndeplinită; astfel de cadre de referință se numesc inerțiale
Fenomenul conform căruia un corp care nu este supus unor influențe externe necompensate își menține viteza constantă (inclusiv zero dacă corpul este în repaus) se numește inerție, iar cadrele de referință în raport cu care astfel de corpuri se mișcă cu o viteză constantă sau sunt în repaus. sunt numite inerțială. În acest sens, prima lege a lui Newton este adesea numită legea inerției. Mișcarea uniformă rectilinie a unui corp într-un cadru de referință inerțial se numește mișcare inerțială. Conceptul de cadru inerțial de referință este fundamental în fizică în general și în mecanică în special.
Legile mecanicii nu depind de cadru de referință inerțial la care se referă. Cu alte cuvinte, toate cadrele de referință inerțiale pentru orice fenomen mecanic sunt egale, adică. nu există un cadru de referință inerțial special, „principal”, a cărui mișcare relativă ar putea fi considerată „mișcare absolută”.
8. Forță. A doua lege a lui Newton.
Prima lege a lui Newton indică faptul că pentru a modifica viteza unui corp în raport cu un cadru de referință inerțial, i.e. Pentru mișcarea accelerată a unui corp, este necesar ca alt corp să acționeze asupra acestui corp. Un astfel de impact se numește forta . Natura forțelor poate fi diferită, dar pentru orice forță sunt caracteristice două proprietăți de bază.
1. Forța este o mărime fizică, adică poate fi caracterizat nu numai din punct de vedere calitativ, care îl deosebește de alte mărimi fizice, ci poate fi exprimat și într-un anumit mod cantitativ. Acest lucru este confirmat de faptul experimental că forțe diferite provoacă accelerații diferite.
2. Forța este o mărime vectorială. Ca urmare a acțiunii unei forțe asupra unui corp, acesta capătă o accelerație, care este o mărime vectorială. Prin urmare, forța este și o mărime vectorială: schimbând direcția forței, schimbăm direcția accelerației. Modulul vectorului forță determină măsura acțiunii altor corpuri asupra unui corp dat.
În acest fel, putere - o marime fizica vectoriala care caracterizeaza actiunea unui corp asupra altuia, care, fiind necompensata, duce la o modificare a acceleratiei acestui corp si este o masura a unui astfel de impact. În sistemul SI, forța este de 1 N. Forța se caracterizează prin: punct de aplicare, modul, direcție.
O relație cantitativă directă între forța care acționează asupra corpului și accelerația acestui corp se stabilește prin A doua lege a lui Newton :
Accelerația pe care o dobândește un corp sub acțiunea unei forțe este direct proporțională cu această forță, iar direcția ei coincide cu direcția acestei forțe. Sau: rezultanta tuturor forțelor care acționează asupra unui corp este egală cu produsul dintre masa și accelerația corpului.
Semnificație fizică: 1) Legea leagă cinematică și caracteristici dinamice un corp; 2) Legea spune ce se va întâmpla cu corpul dacă alte corpuri sau câmpuri acţionează asupra lui 3) Unitatea de măsură a forţei este 1 Newton
Dinamica este ramura mecanicii de care se ocupă tipuri diferite mișcări mecanice, ținând cont de interacțiunea corpurilor între ele. Fundamentele dinamicii sunt cele trei legi ale lui Newton, care sunt rezultatul unei generalizări a observațiilor și experimentelor în domeniul fenomenelor mecanice care au fost cunoscute încă înainte de Newton și realizate de însuși Newton. Legile dinamicii lui Newton (altfel numite dinamică clasică) au o zonă limitată de aplicabilitate. Sunt valabile pentru corpurile macroscopice care se deplasează cu viteze mult mai mici decât viteza luminii în vid. Fenomenul de inerție Să facem observații asupra comportamentului diferitelor corpuri în raport cu Pământul, alegând un cadru fix de referință asociat cu suprafața Pământului. Vom constata că viteza oricărui corp se modifică numai sub acțiunea altor corpuri. De exemplu, lăsați corpul să stea pe un cărucior staționar. Să împingem căruciorul - și corpul se va răsturna împotriva mișcării. Dacă, dimpotrivă, căruciorul în mișcare cu corpul este oprit brusc, acesta se va răsturna în sensul de mișcare. Evident, dacă nu ar exista frecare între cărucior și corp, atunci corpul nu s-ar răsturna. În primul caz, s-ar întâmpla următoarele: deoarece viteza corpului în picioare este zero, iar viteza căruciorului a început să crească, căruciorul ar aluneca înainte de sub corpul staționar. În al doilea caz, în timpul frânării căruciorului, corpul care stă pe acesta își păstrează viteza și alunecă înainte din căruciorul oprit.
Alt exemplu. O bilă de metal se rostogolește pe un jgheab înclinat pe un plan orizontal de la aceeași înălțime h (Fig. 16), prin urmare, viteza sa în punctul în care începe mișcarea orizontală este întotdeauna aceeași. Lăsați suprafața orizontală să fie presărată mai întâi cu nisip. Mingea va parcurge o distanță scurtă s1 și se va opri. Înlocuiți suprafața nisipoasă cu o placă netedă. Mingea se va opri până la o distanță deja mult mai mare s2. Înlocuiți placa cu gheață. Mingea se va rostogoli foarte mult timp și va acoperi distanța s3 >> s2 până se oprește. Această succesiune de experimente arată că dacă reducem influența mediu inconjurator pe un corp în mișcare, mișcarea sa orizontală în raport cu Pământul se apropie la nesfârșit uniformă și rectilinie. (Când un corp se deplasează de-a lungul unei suprafețe orizontale, atracția acestui corp de către Pământ este compensată de elasticitatea suportului - scânduri, gheață etc.) Faptul că corpul tinde să nu mențină nicio mișcare, și anume rectilinie, este evidenţiată, de exemplu, de următorul experiment (Fig. 17) . O minge care se deplasează rectiliniu de-a lungul unei suprafețe orizontale plane, ciocnind cu un obstacol de formă curbilinie, este forțată să se miște în arc sub acțiunea acestui obstacol. Cu toate acestea, când mingea ajunge la marginea obstacolului, se oprește din mișcare într-o direcție curbilinie și începe din nou să se miște în linie dreaptă. Rezumând rezultatele observațiilor de mai sus (și similare), putem concluziona că, dacă un corp dat nu este afectat de alte corpuri sau acțiunile lor sunt compensate reciproc, acest corp este în repaus sau viteza lui rămâne neschimbată în raport cu cadrul de referință fix. legat de suprafața Pământului. Fenomenul unui corp care menține o stare de repaus sau o mișcare uniformă rectilinie în absența sau compensarea influențelor externe asupra acestui corp se numește inerție.
Concluzia despre existența fenomenului de inerție a fost făcută mai întâi de Galileo, iar apoi de Newton. Această concluzie este formulată sub forma primei legi a lui Newton (legea inerției): există astfel de cadre de referință, în raport cu care corpul (punctul material), în absența influențelor externe asupra acestuia (sau cu compensarea lor reciprocă) , menține o stare de repaus sau o mișcare rectilinie uniformă. Cadrele de referință în care este îndeplinită prima lege a lui Newton se numesc inerțiale. Prin urmare, sistemele de referință inerțiale sunt astfel de sisteme de referință în raport cu care punctul material, în absența influențelor externe asupra acestuia sau a compensării lor reciproce, este în repaus sau se mișcă uniform și rectiliniu. 
Observațiile arată că cu un grad foarte ridicat de precizie poate fi considerat un cadru de referință inerțial sistem heliocentric, în care originea este asociată cu Soarele, iar axele sunt îndreptate către anumite stele „fixe”. Cadrele de referință legate rigid de suprafața Pământului, strict vorbind, nu sunt inerțiale, deoarece Pământul se mișcă pe orbită în jurul Soarelui și, în același timp, se rotește în jurul propriei axe. Cu toate acestea, atunci când descriem mișcări care nu au o scară globală (adică la nivel mondial), sistemele de referință asociate cu Pământul pot fi considerate inerțiale cu suficientă precizie. Cadrele de referință care se mișcă uniform și rectiliniu în raport cu orice cadru de referință inerțial sunt, de asemenea, inerțiale (vezi mai jos). Galileo a stabilit că este imposibil să se determine dacă acest sistem este în repaus sau se mișcă uniform și rectiliniu prin orice experimente mecanice stabilite în interiorul unui cadru de referință inerțial. Această afirmație se numește principiul relativității lui Galileo sau principiul mecanic al relativității. Acest principiu a fost dezvoltat ulterior de A. Einstein și este unul dintre postulatele teoriei speciale a relativității. Sisteme inerțiale referințele joacă un rol extrem de important în fizică, deoarece, conform principiului relativității lui Einstein, expresia matematică a oricărei legi a fizicii are aceeași formă în fiecare cadru inerțial de referință. Pe viitor, vom folosi doar sisteme inerțiale (fără să menționăm acest lucru de fiecare dată). Cadrele de referință în care prima lege a lui Newton nu este îndeplinită se numesc neinerțiale. Astfel de sisteme includ orice cadru de referință care se deplasează cu accelerație în raport cu cadrul de referință inerțial.
Ca primă lege, Newton a luat principiul inerției lui Galileo (1632) și l-a completat cu conceptul de cadru inerțial de referință. Conform principiului inerției lui Galileo corp liber păstrează o stare de repaus sau o mișcare uniformă, rectilinie până când influența altor corpuri o scoate din această stare.
Din acest principiu rezultă că starea de repaus sau mișcarea rectilinie uniformă nu necesită influențe externe pentru a o menține. Aceasta manifestă o proprietate dinamică specială a corpurilor, numită inerţie. Prin urmare, prima lege a lui Newton se numește legea inerției, iar mișcarea unui corp în absența influențelor altor corpuri se numește mișcare de inerție.
Prima lege a lui Newton nu este valabilă în toate cadrele de referință. Sunt apelate sistemele pe care rulează sisteme de referință inerțiale.
S-a stabilit experimental că cadrul de referință practic inerțial este cadrul de referință heliocentric, a cărui origine se află în centrul Soarelui, iar axele sunt desenate în direcția a trei stele îndepărtate, alese, de exemplu, astfel că sunt reciproc perpendiculare.
Pentru multe scopuri practice, atunci când corpurile macroscopice se mișcă, sistemul asociat Pământului este folosit ca sistem de referință. Un astfel de cadru de referință este considerat a fi aproximativ inerțial datorită influenței rotației zilnice și anuale a Pământului.
Astfel, putem da următoarea formulare a primei legi a lui Newton: există astfel de cadre de referință în care corpul menține o stare de repaus sau o mișcare rectilinie uniformă până când influența altor corpuri îl scoate din această stare.
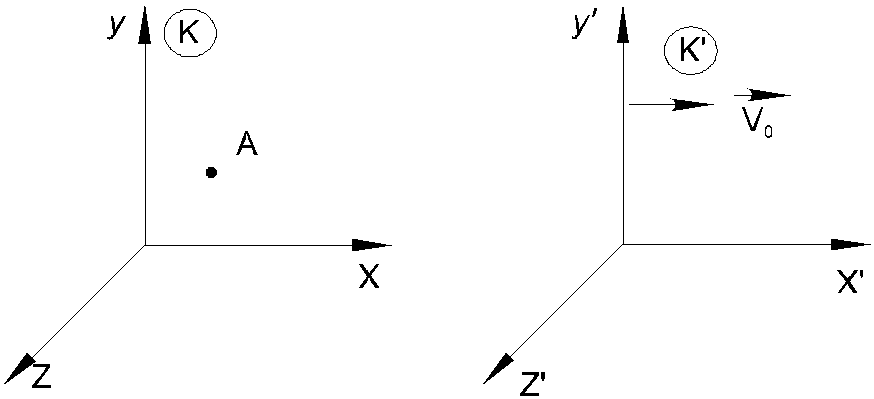
Să arătăm că orice cadru de referință care se mișcă uniform și rectiliniu în raport cu cadrul inerțial este de asemenea inerțial. Fie corpul A să fie în repaus într-un cadru inerțial de referință K (Fig. 3.1). Cadrul de referință K "se mișcă în raport cu cadrul K uniform și rectiliniu cu o viteză. Corpul A în raport cu cadrul K" se mișcă uniform și rectiliniu cu o viteză -  , care satisface și prima lege a lui Newton. Prin urmare, cadrul de referință K" este inerțial. Astfel, conform unui singur cadru de referință inerțial cunoscut, este posibil să construiți oricâte dintre ele doriți folosind metoda descrisă mai sus.
, care satisface și prima lege a lui Newton. Prin urmare, cadrul de referință K" este inerțial. Astfel, conform unui singur cadru de referință inerțial cunoscut, este posibil să construiți oricâte dintre ele doriți folosind metoda descrisă mai sus.
3.1.2. A doua lege a lui Newton
Această lege este legea de bază a dinamicii unui punct material și a unui corp rigid care se deplasează înainte.
Legea stabilește o relație între forță, masă și accelerație.
Experiența arată că orice modificare a mărimii sau direcției vitezei unui corp este cauzată de interacțiunea acestuia cu alte corpuri.
În mecanică, forța este definită ca o măsură cantitativă a interacțiunii corpurilor, care duce la o modificare a vitezei sau a deformarii acestora.
Forța se caracterizează prin mărime, direcție și punctul de aplicare. Prin urmare, forța este o mărime vectorială.
Conform ideilor moderne bazate pe experiență, toate interacțiunile observate în natură pot fi reduse la patru fundamentale: gravitaționale, slabe, electromagnetice și puternice.
Interacțiune gravitațională inerente tuturor obiectelor materiale. Este determinată de prezența masei în corpurile materiale și respectă legea gravitației universale a lui Newton. Raza de acțiune a interacțiunii gravitaționale este nelimitată. În domeniul microlumilor, rolul interacțiunii gravitaționale este neglijabil.
Interacțiune slabă- rază scurtă, există în microcosmos și se manifestă prin ceea ce duce la un anumit tip de instabilitate a particulelor elementare.
Interacțiune electromagnetică manifestată în interacțiunea curenților și sarcinilor. Gama de interacțiune electromagnetică este nelimitată. Este decisiv în formarea atomilor, moleculelor și corpurilor macroscopice.
Interacțiune nucleară sau puternică este cel mai intens. Raza de interacțiune puternică este foarte mică ~10 -15 m. Datorită acestei interacțiuni, protonii și neutronii sunt păstrați în nuclee, în ciuda respingerii puternice a protonilor.
Forțele nefundamentale includ forțe de elasticitate, frecare, rezistență și altele. Toate aceste forțe pot fi reduse la electromagnetice sau gravitaționale, totuși, acest lucru duce la o complicație semnificativă a rezolvării problemelor din mecanică. Din acest motiv, în mecanică, forțele de elasticitate și frecare sunt considerate alături de cele fundamentale.
Din punct de vedere empiric, a fost stabilită o altă proprietate importantă a forțelor, care se manifestă în interacțiunea mecanică. Forțele din mecanică se supun principiul suprapunerii, care este după cum urmează: interacțiunea simultană a particulei M cu câteva altelenparticule cu forțe  echivalent cu acțiunea unei forțe
echivalent cu acțiunea unei forțe  egală cu suma lor vectorială.
egală cu suma lor vectorială.
 . (3.1)
. (3.1)
Putere se numeste rezultanta.
După cum arată experiența, toate corpurile au proprietatea de a împiedica schimbarea mărimii și direcției vitezei. Această proprietate se numește inerţie.
Masa poate fi definită în două moduri. Prima dintre ele este după cum urmează. Este selectat un corp de referință, a cărui masă este m et este luată ca unitate de masă. Masa m a corpului investigat se determină din următorul raport, stabilit empiric:
 ,
,
Unde Ași A et - acceleraţii cauzate de acţiunea aceleiaşi forţe asupra corpurilor de referinţă şi investigate. Aceasta definește așa-numitul masa inertă.
A doua metodă se bazează pe utilizarea legii gravitației universale. Aceasta definește așa-numitul masa gravitațională.
A. Einstein a formulat principiul echivalenței maselor gravitaționale și inerțiale: masele inerțiale și gravitaționale ale aceluiași corp sunt aceleași.
Echivalența maselor inerțiale și gravitaționale face posibilă alegerea unei unități de măsură pentru ele. Ca unitate de masă în sistemul SI, se adoptă kilogramul (kg) - masa corpului de referință platină-iridiu stocată în Franța la Biroul Internațional de Greutăți și Măsuri.
Impactul dinamic al unui corp în mișcare asupra altor corpuri depinde de viteză și masă. Prin urmare, ca o caracteristică dinamică a intensității traficului, introducem cantitate vectorială  , numită impuls (sau impuls) al corpului și egal cu produsul dintre masa și viteza acestuia:
, numită impuls (sau impuls) al corpului și egal cu produsul dintre masa și viteza acestuia:
 .
(3.2)
.
(3.2)
Unitatea de măsură este kilogram-metru împărțit la o secundă (kg m/s).
Conform celei de-a doua legi a lui Newton, derivata în timp a impulsului unui corp este egală cu rezultanta tuturor forțelor aplicate acestuia:
 . (3.3)
. (3.3)
Din (3.3) rezultă că modificarea impulsului are loc în direcția forței rezultante .
Rețineți că a doua lege a lui Newton în forma (3.3) admite descrierea mișcării unui corp cu masă variabilă. Dacă masa corpului este constantă, atunci din (3.2) și (3.3) obținem ecuația celei de-a doua legi a lui Newton sub forma
 , (3.4)
, (3.4)
de unde, ținând cont de formula (2.21), obținem:
 . (3.5)
. (3.5)
Unitatea de forță SI este o unitate derivată a cărei definiție se bazează pe formula (3.5). Unitatea de forță - 1 Newton (N) este forța care conferă o accelerație de 1 m unui corp cu o masă de 1 kg./ Cu 2 .
A doua lege a lui Newton este adesea menționată drept legea fundamentală a dinamicii mișcării de translație. Cu ajutorul acestei legi în mecanică, doua sarcini principale:
1. Sarcina principală directă -stabilirea ecuaţiilor diferenţiale ale mişcării unui corp (puncte) şi rezolvarea acestora.
2. Problema principală inversă- constatarea dependenţei forţelor de interacţiune ale corpurilor de coordonatele, vitezele şi timpul lor, adică stabilirea legilor interacţiunii.





