Kinematik çift türleri ve kısa açıklamaları
Fiziksel miktarlar ve ölçü birimleri,
Mekanikte kullanılır
| Fiziksel miktar | Ölçü birimi | ||
| İsim | atama | İsim | atama |
| Uzunluk Kütle Zaman Düzlem açısı Bir noktanın yer değiştirmesi Doğrusal hız Açısal hız Doğrusal ivme Açısal ivme Dönme frekansı Malzeme yoğunluğu Atalet momenti Kuvvet Kuvvet Momenti Tork İş Kinetik enerji Güç | L, l, r m t, t a, b, g, d S sen w a e n r J F, P, S, G M T A E N | Metre Kilogram Saniye Radyan, Derece Metre Metre/saniye Radyan/saniye Metre/saniye kare Radyan/saniye kare Dakikada Devir Kilogram/metreküp Kilogram metre kare Newton Newton metre Newton metre Joule Joule Watt | m kg s rad, α 0 m m / s rad / s, 1 / s m / s 2 rad / s 2, 1 / s 2 rpm kg / m 3 kg. m 2 N (kg. m / s 2) Nm Nm J \u003d Nm JW (J / s) |
MEKANİZMALARIN YAPISI VE SINIFLANDIRILMASI
Mekanizma yapısı
Mekanizmalar şunları içerir: katı cisimler Kim aradı bağlantılar. Bağlantılar sağlam olmayabilir (örneğin bir kayış). Hidrolik ve pnömomekanizmalardaki sıvılar ve gazlar bağlantı olarak kabul edilmez.
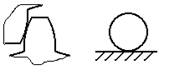
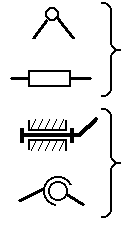
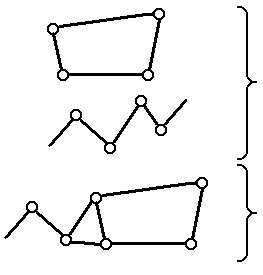
Mekanizmaların kinematik diyagramlarındaki bağlantıların koşullu gösterimi GOST tarafından düzenlenir. Bazı bağlantıların resim örnekleri, Şek. 1.1.
Pirinç. 1.1. Bağlantı Resmi Örnekleri
mekanizmaların kinematik diyagramları üzerinde
Bağlantılar gerçekleşir:
– giriş(liderler) - onların ayırt edici özelliği, temel iş kendilerine uygulanan kuvvetler pozitiftir (kuvvetin yönü, uygulama noktasının hareket yönü ile çakışıyorsa veya altındaysa kuvvetin işi pozitif olarak kabul edilir. dar açı Ona);
– hafta sonları(köle) - kendilerine uygulanan kuvvetlerin temel işi negatiftir (kuvvetin yönü, uygulama noktasının hareket yönünün tersi ise, kuvvetin işi negatif olarak kabul edilir);
– mobil;
– hareketsiz(yatak, raf).
Kinematik diyagramlarda bağlantılar Arap rakamlarıyla gösterilir: 0, 1, 2, vb. (bkz. şekil 1.1).
İki bitişik bağlantının hareketli bağlantısına denir. kinematik çift. Bir bağlantının diğerine göre hareket etme olasılığına izin verir.
sınıflandırma kinematik çiftler
1. Bağlantıların bağlantı unsurları ile kinematik çiftler ayrılır:
- daha yüksek için(örneğin, dişli ve kam mekanizmalarında bulunurlar) - bağlantılar bir hat boyunca veya bir noktada birbirine bağlanır:
– daha düşük- Bağlantıların birbirleriyle bağlantısı yüzeyde gerçekleşir. Sırayla, alt bileşikler bölünür:
rotasyon için
ilerici
silindirik
|
küresel
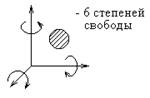
2. Üst üste binen bağlantıların sayısına göre. Uzayda olan beden (Kartezyen koordinat sisteminde X, Y, Z) 6 serbestlik derecesine sahiptir. Üç eksenin her biri boyunca hareket edebilir X, Y ve Z, her eksen etrafında dönmenin yanı sıra (Şekil 1.2). Bir cisim (bağ) başka bir cisim (bağ) ile kinematik bir çift oluşturursa, bu 6 serbestlik derecesinden bir veya birkaçını kaybeder.
Cismin (bağ) kaybettiği serbestlik derecesi sayısına göre kinematik çiftler 5 sınıfa ayrılır. Örneğin, kinematik bir çift oluşturan cisimler (bağlar) her biri 5 serbestlik derecesini kaybederse, bu çifte 5. sınıfın kinematik çifti denir. 4 serbestlik derecesi kaybolursa - 4. sınıf vb. Farklı sınıfların kinematik çiftlerinin örnekleri, Şek. 1.2.
 Pirinç. 1.2. Çeşitli sınıfların kinematik çiftlerine örnekler
Pirinç. 1.2. Çeşitli sınıfların kinematik çiftlerine örnekler
Yapısal ve yapıcı bir temelde kinematik çiftler dönme, öteleme, küresel, silindirik vb.
Kinematik zincir
Kinematik çiftler tarafından birbirine bağlanan birkaç bağlantı oluşur kinematik zincir.
Kinematik zincirler şunlardır:
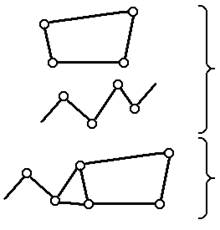
kapalı
açık
Kinematik zincirden vites al, gerekli:
- bir bağlantıyı taşınmaz yapın, yani bir çerçeve (raf) oluşturun;
- bir veya daha fazla bağlantı için hareket yasasını ayarlayın (onları lider yapın), diğer tüm bağlantıların çalışacağı şekilde gereklidir amaçlı hareketler.
Mekanizmanın serbestlik derecesi sayısı- bu, sabit bağlantıya (raf) göre tüm kinematik zincirin serbestlik derecesi sayısıdır.
İçin uzaysal kinematik zincir Genel görünümşartlı olarak belirtmek:
hareketli parça sayısı - n,
tüm bu bağlantıların serbestlik derecesi sayısı 6n,
5. sınıfın kinematik çiftlerinin sayısı - P5,
5. sınıfın kinematik çiftleri tarafından içlerinde bulunan bağlantılara uygulanan bağ sayısı, - 5R 5 ,
4. sınıfın kinematik çiftlerinin sayısı - R4,
4. sınıfın kinematik çiftleri tarafından içlerinde bulunan bağlantılara uygulanan bağ sayısı, - 4P 4 vb.
İçin düz kinematik zincir ve buna göre düz bir mekanizma içinBu formüle P.L denir. Chebyshev (1869). Düzlemde vücudun altı değil üç serbestlik derecesine sahip olması şartıyla Malyshev formülünden elde edilebilir:
W \u003d (6 - 3)n - (5 - 3)P 5 - (4 - 3) P 4.
W değeri, mekanizmanın kaç tane tahrik bağlantısına sahip olması gerektiğini gösterir (eğer W= 1 - bir, W= 2 - iki önde gelen bağlantı, vb.).
Mekanizma yapısı.
Kinematik çiftlerin sınıflandırılması
Kinematik çiftler (KP) aşağıdaki kriterlere göre sınıflandırılır:
1) bağlantı yüzeylerinin temas noktası (bağlantı noktası) tipine göre:
Bağlantıların temasının bir düzlem veya yüzey boyunca gerçekleştirildiği alt olanlar (kayar çiftler);
Bağlantıların temasının çizgiler veya noktalar boyunca gerçekleştirildiği daha yüksek (yuvarlanma ile kaymaya izin veren çiftler). Örneğin dişli ve kam mekanizmalarında bulunurlar).
2) bir çift oluşturan bağlantıların göreli hareketine göre:
rotasyonel;
çeviri;
Silindirik;
Küresel;
vida;
Düz.
Bağlantıları sadece dönme, öteleme, silindirik ve küresel çiftler oluşturan mekanizmaya denir. kaldıraç.
3) kapatma yöntemine göre (çiftin bağlantıları arasında temasın sağlanması):
Güç (ağırlık kuvvetlerinin etkisi veya bir yayın elastik kuvveti nedeniyle);
Geometrik (çiftin çalışma yüzeylerinin tasarımı nedeniyle).
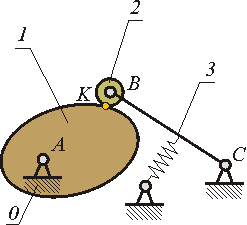
Şekil.2.1 Şekil.2.2
4) Bağlantıların göreli hareketindeki hareketlilik sayısına göre.
5) bağlantıların bağıl hareketine dayatılan bağlantı koşullarının sayısına göre (bağlantı koşullarının sayısı kinematik çiftin sınıfını belirler);
Uzayda olan cisim (Kartezyen koordinat sistemi X, Y, Z'de) 6 serbestlik derecesine sahiptir. X, Y ve Z eksenlerinin her biri boyunca hareket edebilir ve her bir eksen etrafında dönebilir (Şekil 2.3). Bir cisim (bağ) başka bir cisim (bağ) ile kinematik bir çift oluşturursa, bu 6 serbestlik derecesinden bir veya birkaçını kaybeder.
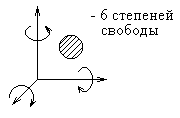
Pirinç. 2.3. Uzayda vücudun serbestlik dereceleri
Tüm çiftler, her bir bağlantının hareketliliğine dayatılan bağ sayısına bağlı olarak beş sınıfa ayrılır. Örneğin, kinematik bir çift oluşturan cisimler (bağlar) her biri 5 serbestlik derecesini kaybederse, bu çifte 5. sınıfın kinematik çifti denir. 4 serbestlik derecesi kaybolursa - 4. sınıf vb. Serbestlik derecesi sayısı ile gösterilir. Uygulanan bağlantıların sayısı ile gösterilir. Bu durumda, hareketlilik derecelerinin sayısı aşağıdaki formülle belirlenebilir: .
Birinci sınıf çift: ; .
İkinci sınıf çifti: ; .
Üçüncü sınıf çifti: ; .
Dördüncü sınıftan bir çift: ; .
Beşinci sınıf çifti: ; .
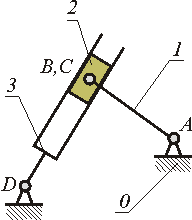
Çift sınıflandırma örnekleri:
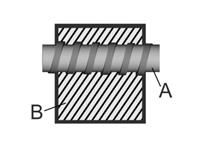
Kinematik "vidalı somun" çiftini düşünün (Şekil 2.4). Bu çiftin hareketlilik derecesi sayısı 1'dir ve uygulanan bağların sayısı 5'tir. Bu çift beşinci sınıfın bir çifti olacaktır, bir vida veya somun için yalnızca bir hareket türü serbestçe seçilebilir ve ikincisi hareket eşlik edecek.
Şekil 2.4
Kinematik zincirlerin sınıflandırılması
Kinematik çiftlerle birbirine bağlanan birkaç bağlantı, bir kinematik zincir oluşturur.
Kinematik zincirler şunlardır:
Kapalı (basit). Kapalı bir zincirde, her bağlantı en az iki kinematik çift içerir.
Açık (basit).
Karmaşık.
Şubelerin varlığına göre zincirleri ayırt etmek basit(zincirin her bir halkası en fazla iki kinematik çift içerir) ve karmaşık veya dallanmış(bazı bağlantılar üç veya daha fazla çift halinde gelir); dallı zincirlerde çoklu (çift, üçlü vb.) menteşeler mevcut olabilir.
Bağlantıların hareket alanına göre zincirler düz(tüm bağlantıların noktalarının yörüngeleri, paralel düzlemlerde uzanan düz eğrilerdir) ve uzaysal.
Kinematik bir zincirden bir mekanizma elde etmek için gereklidir:
Bir bağlantıyı hareketsiz hale getirin, ör. bir çerçeve (raf) oluşturun;
Bir veya daha fazla bağlantı için hareket yasasını ayarlayın (öncü yapın), diğer tüm bağlantılar gerekli amaca uygun hareketleri yapacak şekilde.
Bazı ek tanımlar:
Genelleştirilmiş mekanizma koordinatı- mekanizmanın tüm bağlantılarının rafa göre konumunu belirleyen bağımsız koordinatların her biri;
Mekanizmanın serbestlik derecesi sayısı- bu, sabit bağlantıya (raf) göre tüm kinematik zincirin serbestlik derecesi sayısıdır.
Genel anlamda bir uzamsal kinematik zincir için şartlı olarak şunları belirtiyoruz:
Hareketli bağlantı sayısı - n,
Tüm bu bağlantıların serbestlik derecesi sayısı 6n,
5. sınıfın kinematik çiftlerinin sayısı - P 5,
5. sınıfın kinematik çiftleri tarafından içlerinde bulunan bağlantılara dayatılan bağ sayısı 5Р 5'tir,
4. sınıfın kinematik çiftlerinin sayısı - R 4,
4. sınıfın kinematik çiftleri tarafından içlerinde bulunan bağlantılara uygulanan bağ sayısı 4P 4, vb.
Kinematik zincirin diğer halkalarla kinematik çiftler oluşturan bağlantıları, bazı serbestlik derecelerini kaybeder. Kinematik zincirin rafa göre kalan serbestlik derecesi aşağıdaki formülle hesaplanabilir.
Bu, uzaysal kinematik zincirin yapısal formülü veya P.I. tarafından elde edilen Malyshev formülüdür. 1887'de Somov ve A.P. 1923'te Malyshev.
W'nin değerine, mekanizmanın hareketlilik derecesi denir (eğer bir kinematik zincirden bir mekanizma oluşturulmuşsa).
Düz bir kinematik zincir ve buna göre düz bir mekanizma için
![]()
Bu formüle P.L denir. Chebyshev (1869). Düzlemde vücudun altı değil üç serbestlik derecesine sahip olması şartıyla Malyshev formülünden elde edilebilir:
W değeri, mekanizmanın kaç tane önde gelen bağlantıya sahip olması gerektiğini gösterir (eğer W = 1 - bir, W = 2 - iki öncü bağlantı, vb.).
Yapısal sentez ve analiz kavramı
Herhangi bir teknik sistemin yapısı, işlevsel olarak birbirine bağlı bir dizi eleman ve bunlar arasındaki ilişkiler tarafından belirlenir. Aynı zamanda, mekanizmalar için, elemanlar bağlantılar, bağlantı grupları veya tipik mekanizmalar ve ilişkiler hareketli (KP) veya sabit bağlantılar olarak anlaşılır. Bu nedenle, altında mekanizma yapısıöğelerinin toplamı ve aralarındaki ilişkiler olarak anlaşılır, yani. bir dizi bağlantı, grup veya tipik mekanizma ve hareketli veya sabit bağlantılar. Mekanizmanın geometrik yapısı, elemanlarının geometrik şekli, konumları ve aralarındaki bağlantıların türü belirtilerek tam olarak tanımlanır. Bir mekanizmanın yapısı, tasarımın farklı aşamalarında, farklı soyutlama seviyeleri ile çeşitli yollarla tanımlanabilir: işlevsel düzeyde - işlevsel bir diyagram, bağlantılar ve yapısal gruplar düzeyinde - bir blok diyagram, vb. yapısal şema - grafik görüntü GOST tarafından önerilen semboller kullanılarak yapılan (örneğin, GOST 2.703-68'e bakınız) veya özel literatürde kabul edilen, elemanların sayısı ve konumu (bağlantılar, gruplar) ile kinematik türü ve sınıfı hakkında bilgi içeren mekanizma bu elemanları birbirine bağlayan çiftler. Mekanizmanın kinematik diyagramından farklı olarak, yapısal diyagram bağlantıların boyutları hakkında bilgi içermez ve ölçeğe bakılmadan çizilir. (Not: kinematik şema- kinematiğini incelemek için tasarlanmış bir mekanizmanın grafik modeli.)
Yapısal sentezde tasarımın herhangi bir aşamasında olduğu gibi, sentez görevleri ve analiz görevleri ayırt edilir.
Yapısal analizin görevi belirli bir mekanizmanın yapısının parametrelerini belirleme görevidir - bağlantıların ve yapısal grupların sayısı, CP'nin sayısı ve türü, hareketlilik sayısı (ana ve yerel), kontur sayısı ve gereksiz bağların sayısı .
görev yapısal sentez belirli özelliklere sahip yeni bir mekanizmanın yapısını sentezleme görevidir: hareketlilik sayısı, yerel hareketliliğin olmaması ve aşırı bağlantıların olmaması, minimum bağlantı sayısı, belirli bir tipteki çiftlerle (örneğin, yalnızca dönme, teknolojik olarak en gelişmiş), vb.
Yapısal sentez ve analizin temel kavramları
Mekanizmanın hareketliliği- mekanizmanın bağlantılarının düzlemdeki veya uzaydaki konumunu benzersiz bir şekilde belirleyen bağımsız genelleştirilmiş koordinatların sayısı.
Bağ- verilen koordinat boyunca vücudun hareketine uygulanan kısıtlama.
Yedekli (pasif)- belirli bir koordinatta zaten var olan bağlantıları tekrar eden veya çoğaltan ve bu nedenle mekanizmanın gerçek hareketliliğini değiştirmeyen mekanizmadaki bu tür bağlantılar. Bu durumda, mekanizmanın hesaplanan hareketliliği azalır ve statik belirsizliğinin derecesi artar. Bazen başka bir tanım kullanılır: Yedek bağlantılar- bunlar, mekanizmadaki sayıları, kinematik çiftler tarafından uygulanan toplam bağ sayısı ile tüm bağlantıların hareketlilik derecelerinin toplamı, yerel hareketlilik ve verilen (gerekli) hareketlilik arasındaki farkla belirlenen bağlardır. mekanizma bir bütündür.
Yerel hareketlilik- konum fonksiyonunu (ve transfer fonksiyonlarını) etkilemeyen, ancak mekanizmaya başka amaçlar için dahil edilen mekanizmanın hareketliliği (örneğin, kam mekanizmasındaki silindirin hareketliliği, en yüksek kayma çiftinde bir değiştirme sağlar) yuvarlanma sürtünmesi ile sürtünme).
Mekanizma yapısı
Çeşitli mekanizma tasarımları arasında şunlar bulunur: çubuk (kol), kam, sürtünme, dişli mekanizmaları, esnek bağlantılara sahip mekanizmalar (örneğin kayış tahrikleri) ve diğer tipler.
Daha az yaygın sınıflandırmalar, düz veya mekansal bir tasarımda vb. daha düşük veya daha yüksek çiftlere sahip mekanizmaların varlığını ima eder.
Kinematik bir çift kavramı
kinematik çift iki bağlantının hareketli bağlantısı olarak adlandırılır. Kinematik çiftler çeşitli kriterlere göre sınıflandırılır:
1) Kinematik bir çiftte bağlanan bağlantıların bağıl hareketi üzerine bindirilen bağların sayısına göre. Bu temelde, kinematik çiftler sınıflara ayrılır. Aşağıdaki atamalar kabul edilir:
W, serbestlik derecesi sayısıdır
S, bağlantıların göreli hareketi üzerine bindirilmiş bağların sayısıdır.
Uzayda serbest bir bağlantının altı serbestlik derecesi vardır. Bağlantılar bağlandığında, bu serbestlik derecelerinin bir kısmı alınır ("bağlantılar uygulanır"). Üst üste binen bağların sayısı ile bağlantıların göreli hareketinde kalan serbestlik derecesi sayısı arasındaki ilişki açıktır:
veya
S=6–B,
bu nedenle, beş kinematik çift sınıfı vardır (altı serbestlik derecesini de alırsanız, sabit bir bağlantı elde edersiniz).
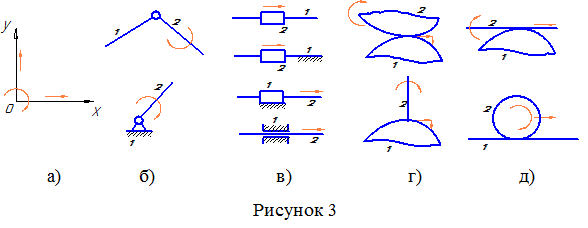
Şekil 2, bazı kinematik çiftlerin örneklerini göstermektedir.
| a) |
S \u003d 1 \u003d\u003e I sınıfı.
|
S \u003d 2 \u003d\u003e II sınıfı.
|
S \u003d 3 \u003d\u003e III sınıfı.
|
 b)
b)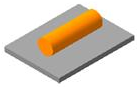 içinde)
içinde)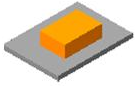 G)
G)şekil 2
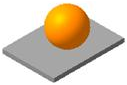
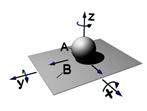
Uçağa göre top (Şekil 2b), ondan kopmadan, dönme hareketleri"X" ve "Y" eksenleri boyunca hareket etmenin yanı sıra üç koordinat ekseninin tümü etrafında. "Z" ekseni boyunca hareket ederken, top uçaktan çıkacaktır, yani. iki serbest bağlantı olacak - kinematik çiftin varlığı sona erecek. Böylece, bir bağlantı, bağlantıların göreli hareketi üzerine bindirilir - bu bir sınıf I kinematik çiftidir.
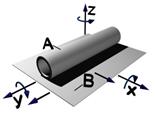
Benzer şekilde, kontağın doğası bozulmadan silindir "Z" ekseni boyunca hareket ettirilemez ve "Y" ekseni etrafında döndürülemez (Şekil 2c), yani. bağ sayısı ikidir - bir çift sınıf II. Başka bir düzleme göre bir düzlem, "X" ve "Y" eksenleri boyunca ötelemeli olarak hareket edebilir ve ayrıca temasın doğasını bozmadan "Z" ekseni etrafında dönebilir. "Z" ekseni boyunca öteleme hareketi ve "X" ve "Y" eksenleri etrafında dönme hareketleri imkansızdır (Şekil 2d). Böylece bağ sayısı üç - bir sınıf III kinematik çiftidir.
Not: Bir kinematik çiftin iki işlevi varsa ilgili hareketler(biri olmadan diğeri olmaz), bir derece serbestlik verirler.
Örneğin, bir cıvata ve bir somun, beşinci sınıfın kinematik bir çiftini oluşturur. Bu durumda, somunun sabit bir cıvata ile iki hareketi vardır - cıvatanın ekseni etrafında dönme hareketi ve bu eksen boyunca öteleme hareketi, ancak somunu döndürmeden eksen boyunca hareket ettiremezsiniz veya somunu bu şekilde döndüremezsiniz. eksen boyunca hareket etmemesidir. Ayrıca, dişin parametrelerini bilmek, dönme açısı ile somunun öteleme hareketi arasındaki ilişkiyi belirlemek kolaydır.
Bu iki hareket, tek bir karmaşık (bu durumda sarmal) hareket oluşturur. Bu bağlantıların göreli hareketinde bir serbestlik derecesi belirler, yani. bağlantı sayısı beştir;
2) kinematik bir çiftte bağlanan bağlantıların temasının doğası gereği. Bu temelde, kinematik çiftler daha yüksek ve daha düşük olarak ayrılır. Daha yüksek çiftler, bu kinematik çifti oluşturan bağlantıların bir nokta veya doğrusal temasına sahiptir.
Alt çiftte, bağlantılar bir yüzey boyunca (belirli bir durumda, bir düzlem boyunca) birbirine temas eder.
Alt kinematik çiftler daha büyük taşıma kapasitesine sahiptir, tk. geniş bir temas alanına sahiptir (daha yüksek çiftte, temas alanı teorik olarak sıfıra eşittir, ancak gerçekte kinematik çiftin elemanları - “temas noktası”) nedeniyle elde edilir. Ancak alt çiftlerde, bir yüzey çalışma sırasında diğerine göre kayar, daha yüksek çiftlerde ise hem kayma hem de yuvarlanma meydana gelebilir.
Kural olarak, kaymaya karşı direnç, bir yüzeyin diğerine göre yuvarlanma direncinden daha büyüktür, yani. Üst çiftteki (sadece haddeleme kullanılıyorsa) sürtünme kayıpları alt çifttekinden daha azdır (bu nedenle, katsayıyı artırmak için faydalı eylem kaymalı yataklar genellikle rulmanlı yataklarla değiştirilir).
Şekil 2b ve 2c'de gösterilen kinematik çiftler en yüksek, Şekil 2d'deki çift ise en düşük kinematik çifttir;
3) kinematik çifti oluşturan bağlantılara ait noktaların hareket yörüngesi boyunca. Bu temelde, uzaysal ve düz kinematik çiftler ayırt edilir.
Düz bir kinematik çiftte, tüm noktalar bir veya paralel düzlemde hareket eder ve hareketlerinin yörüngeleri düz eğrilerdir. Uzamsal çiftlerde, noktalar farklı düzlemlerde hareket eder ve uzaysal eğriler şeklinde yörüngeleri vardır.
Pratikte kullanılan önemli sayıda mekanizma düz mekanizmalardır (I.I. Artobolevsky - üçüncü ailenin mekanizmalarının sınıflandırmasına göre), bu nedenle düz kinematik çiftleri daha ayrıntılı olarak düşünmek gerekir.
Bir düzleme yerleştirilen serbest bağlantının üç serbestlik derecesi vardır (koordinat eksenleri boyunca öteleme hareketi ve verilen düzleme dik bir eksen etrafında dönme hareketi). Böylece, bir düzleme bir bağlantı yerleştirmek, ondan üç derecelik serbestlik alır (üç bağ yükler). Ancak bu bağlantının bir kinematik çiftte başka bir bağlantıyla bağlantısı, göreli harekete daha fazla bağlantı yükler (minimum sayı 1'dir). Sonuç olarak, düzlemde göreli harekette iki veya bir serbestlik derecesine sahip sadece kinematik çiftler var olabilir.
Genel sınıflandırmaya göre bunlar dördüncü ve beşinci sınıf çiftleridir. Beşinci sınıfın en basit çiftleri yalnızca bir hareket sağlar - dönme veya öteleme (teknolojide dönme kinematik çiftine menteşe denir, öteleme çifti, öteleme hareketli bir bağlantıya benzetilerek bazen kaydırıcı olarak da adlandırılır).
Bir düzlemde göreceli harekette iki serbestlik derecesi genellikle iki temas profili sağlar (kinematik diyagramda, bir noktada temas, gerçek bir mekanizmada bir noktaya yansıtılan bir çizgi mümkündür). Böylece, beşinci sınıfın düz kinematik çiftleri (menteşeler ve sürgüler) aynı anda daha düşük çiftlerdir ve dördüncü sınıfın kinematik çiftleri daha yüksek çiftlerdir.
Şekil 3, düzlemsel kinematik çiftlerin şematik bir temsilini göstermektedir.
4) kinematik bir çiftte bağlanan bağlantıların kapanmasının doğasına göre. Bu açıdan birbirinden farklılık gösteren iki tür kinematik çift vardır. Geometrik kapamalı kinematik çiftler ve kuvvet kapamalı kinematik çiftler.
Pozitif kilitlemeli çiftlerde, bağlantıların konfigürasyonu, çalışma sırasında ayrılmalarını önler. Örneğin, biyel kolu kapağı veya başka herhangi bir menteşe (söveli kapı, pencere çerçeveli pencere vb.) kullanarak biyel kolunu krank miline bağlamak.
Güç devresi olan çiftlerde, çalışma sırasında bağlantıların teması sürekli olarak sağlanır operasyon gücü. Şekil 2'de, tüm kinematik çiftler, kapanma kuvveti olan çiftlerdir ve ağırlık, kapatma kuvveti olarak hareket eder. Ağırlık yeterli değilse, bir baskı kuvveti oluşturmak için genellikle çeşitli elastik elemanlar (çoğunlukla yaylar) kullanılır.
MEKANİZMALARIN YAPISI
Temel kavramlar ve tanımlar.
Terimler sistemi, herhangi bir bilgi sisteminin tanımına tek tip bir yaklaşım sağlar. Bu nedenle, kullanılan ifadenin anlamını ve anlamını açıklığa kavuşturmakla başlayalım.
Mekanizma - bir veya daha fazlasının hareketini dönüştürmek için tasarlanmış bir cisimler sistemi katılar ve (veya) diğer cisimlerin ve (veya) kuvvetlerin gerekli hareketlerine etki eden kuvvetler. Mekanizmalar ve makineler teorisinde, katı cisimler hem kesinlikle rijit hem de deforme olabilen cisimler olarak anlaşılır.
Araba- enerjiyi, malzemeleri ve bilgiyi dönüştürmek için mekanik hareketler gerçekleştiren bir cihaz. Malzemeler, emek nesneleri anlamına gelir: işlenmiş ürünler, taşınan mallar, vb.
Detay - montaj işlemleri kullanılmadan, adı ve markasıyla tek tip bir malzemeden yapılmış bir ürün.
Bağlantı belirli bir hareket dönüşümüne katılan katı bir cisimdir. Bir bağlantı, kendi aralarında göreceli hareketi olmayan birkaç parçadan oluşabilir.
Raf - koşullu olarak sabit olarak kabul edilen bir bağlantı.
Giriş bağlantısı- mekanizma tarafından diğer bağlantıların gerekli hareketlerine dönüştürülen, hareketin bildirildiği bir bağlantı.
çıkış bağlantısı- mekanizmanın amaçlandığı hareketi gerçekleştiren bir bağlantı.
Başlangıç bağlantısı - bir mekanizmanın bir veya daha fazla genelleştirilmiş koordinatının atandığı bir bağlantı.
Genelleştirilmiş mekanizma koordinatı- mekanizmanın tüm bağlantılarının rafa göre konumunu belirleyen bağımsız koordinatların her biri.
Mekanizmanın serbestlik derecesi sayısı mekanizmanın genelleştirilmiş koordinatlarının sayısıdır.
Bağ– mekanizmanın serbestlik derecesi sayısını azaltan herhangi bir koşul. Etkisini bir reaksiyonla değiştirerek herhangi bir bağlantı atılabilir.
Yedek bağlantı- ortadan kaldırılması mekanizmanın serbestlik derecesi sayısını değiştirmeyen bir bağ.
kinematik çift- mekanizmanın iki katı gövdesinin, verilen göreli hareketlerine izin vererek bağlantısı. Bir çiftin varlığının koşulu şudur: iki bağlantının varlığı, bunların teması ve bağlantıların göreli hareketi.
Kinematik zincir- birbirleriyle kinematik çiftler oluşturan mekanizmanın bir bağlantı sistemi ve (veya) katı hal elemanları. Kinematik zincirler arasında ayrım yapın açık ve kapalı. Açık sadece bir kinematik çiftte en az bir bağlantıya sahip olan böyle bir kinematik zincir denir. saat kapalı zincirde kinematik çiftlerin serbest elemanlarına sahip hiçbir bağlantı yoktur. Böyle bir zincirin her halkası en az iki çiftte bulunur.
mekanizma elemanı- birbirleriyle doğrudan temas halinde olmayan bağlantılarının etkileşimini sağlayan bir mekanizmanın katı hal, sıvı veya gaz bileşeni.
Kinematik çift arayüz elemanı- diğer iki cismin çiftleşme elemanları tarafından oluşturulan ortak bir yüzey, çizgi veya nokta.
Kinematik bir çiftin (N) serbestlik derecesi (hareketlilik) sayısı- kinematik çiftlerin bağlantılarının göreceli konumunu tanımlamak için gereken bağımsız koordinatların sayısı.
Uzayda serbestçe hareket eden bir cismin altı serbestlik derecesine sahip olduğu bilinmektedir. İletişim koşulları sayısı S Bir kinematik çiftin bağının bağıl hareketi üzerine bindirilmiş, içinde değişebilir. Bir, iki, üç, dört ve beş hareketli kinematik çiftler vardır. Bu nedenle, ilişkimiz var H = 6 - S.
Tek hareketli çift- bağlı katı cisimlerin göreli hareketinde bir serbestlik derecesine sahip kinematik bir çift.
Çift hareketli çift– bağlı katı cisimlerin bağıl hareketinde iki serbestlik derecesine sahip kinematik bir çift.
Üç hareketli çift– bağlı katı cisimlerin göreli hareketinde üç serbestlik derecesine sahip kinematik bir çift.
Dört hareketli çift– bağlı katı cisimlerin bağıl hareketinde dört serbestlik derecesine sahip kinematik bir çift.
Beş hareketli çift– bağlı katı cisimlerin göreli hareketinde beş serbestlik derecesine sahip kinematik bir çift.
Yapısal formül – cebirsel ifade mekanizmanın serbestlik derecesi sayısı, hareketli bağlantıların sayısı, kinematik çiftlerin sayısı ve hareketliliği arasında bir ilişki kuran .
Asura Grubu- mekanizmaya bağlantısı veya bağlantısının kesilmesi, orijinal mekanizmanın hareketliliğine eşit hareketliliğe sahip bir mekanizma oluşturan ve aynı özelliklere sahip diğer zincirlere bölünmeyen bir kinematik zincir.
Ölçek faktörü- sayısal değerin oranı fiziksel miktar karakteristik birimlerde, bu değeri gösteren segmentin (mm) uzunluğuna (bir diyagramda, grafikte vb.)
Ölçekölçek faktörünün tersidir.
Kinematik çiftlerin sınıflandırılması
1. Numaraya bağlı olarak H ayırt etmek bir, iki, üç, dört ve beş hareketli kinematik çiftler. Kısıt denklemlerinin sayısı sınıf numarası olarak alınır.
2. Bağlantı elemanlarının temasının doğası gereği (daha doğrusu elemanların türü), çiftler ayrılır daha düşük ve daha yüksek(F. Relo'nun önerisi). İle kalitesiz elemanları yüzey olan kinematik çiftleri içerir (Şekil 1.2). Elementler daha yüksekçiftler çizgiler veya noktalardır (Şekil 1.2).
3. Eşleştirmenin doğası gereği, kinematik çiftler kuvvet kapanması ile ayırt edilir (bağlantıların teması, örneğin bir ağırlık veya bir yay gibi bir kuvvetin etkisiyle sağlanır) ve kinematik (bağlantıların sabit teması sağlanır) elemanların yapısal şekli nedeniyle).
4. Bağlantıların bağıl hareketinin doğasına bağlı olarak, kinematik çiftler öteleme, dönme, sarmal, silindirik, küresel, düzlemsel olarak ayrılır.
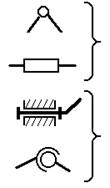
Şek. 1.1, tek hareketli çiftleri gösterir (Sınıf V'nin kinematik çiftleri), bunları daha ayrıntılı olarak ele alalım.
|
|||||
|
|||||
|
|||||
|
Çift tek hareketli:
1) rotasyonel(Şekil 1.1. a) - silindirik bir menteşe. Beş bağlantı koşulu uygulanır: dönme hariç tüm hareketler hariç tutulur.
2) çeviri(Şekil 1.1. b) - beş bağlantı koşulu uygulanır: bir öteleme hariç tüm hareketler hariç tutulur.
3) vida(Şekil 1.1. c) - beş bağlantı koşulu uygulanır: öteleme hariç tüm hareketler hariç tutulur. (Dönme, serbestlik derecesi getirmez, çünkü bu durumda öteleme ve dönme hareketleri bağımsız değildir).
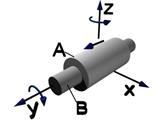
Şek. 1.2 çiftleri gösterir iki, üç, dört ve beş hareketli(IV, III, II ve I sınıflarının kinematik çiftleri) bunları daha ayrıntılı olarak ele alacağız.
|
|
|
||||||
|
||||||||
|
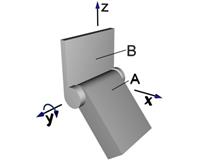
İki hareketli çift(Şek. 1.2.a) - silindir üzerindeki burç. Dört bağlantı koşulu uygulanır, ОХ ve ОZ eksenleri boyunca öteleme ve dönme hareketleri hariç tutulur.
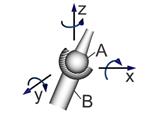
Üç hareketli çift(Şekil 1.2.b) - küresel bir silindir. Üç bağlantı koşulu uygulanır: üç eksen boyunca öteleme hareketleri hariç tutulur.
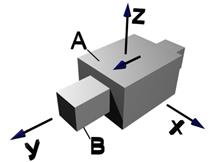
Çift dört hareketli(Şekil 1.2.c) - düzlemde bir silindir. İki bağlantı koşulu uygulanır: OZ ekseni boyunca öteleme hareketi ve O X ekseni etrafındaki dönme hareketi hariç tutulur.
Beş hareketli çift(Şekil 1.2.d) - uçakta bir top. Bir bağlantı koşulu uygulanır: OZ ekseni boyunca öteleme hareketi hariç tutulur.
kinematik çift iletişim koşulları tarafından göreceli hareketlerine kısıtlamalar getiren iki katı bağlantının hareketli konjugasyonu. Bağlantı koşullarının her biri bir serbestlik derecesini ortadan kaldırır ,
yani, uzayda 6 bağımsız göreli hareketten birinin olasılığı. Dikdörtgen bir koordinat sisteminde 3 mümkündür öteleme hareketleri(3 koordinat ekseni yönünde) ve 3 dönme (bu eksenlerin etrafında). İletişim koşullarının sayısına göre S K. p. 5 sınıfa ayrılır. Serbestlik derecesi sayısı K. p. W=6-S. Her sınıf içinde, K. öğeleri, bağlantıların kalan olası göreli hareketlerine göre türlere ayrılır. Bağlantıların temasının niteliğine göre, alt K. p. - yüzeyler boyunca temas ile ve daha yüksek olanlar - çizgiler boyunca veya noktalarda temas ile ayırt edilir. Tüm 5 sınıf ve birçok tür için daha yüksek K. eşyaları mümkündür; alt - sadece 3 sınıf ve 6 tür ( şek.1
). Geometrik olarak kapalı ve kapalı olmayan c.p arasında da bir ayrım yapılır. pilav. bir
) ve ikinci olarak, sözde kapatma için bir baskı kuvveti gereklidir. zorla kapatma (örneğin, bir kam mekanizmasında). Geleneksel olarak, birkaç ara yuvarlanma elemanına (örneğin, bilyalı ve makaralı rulmanlar) ve ara deforme olabilir elemanlara (örneğin, düz yaylı cihazların boşluksuz menteşeleri olarak adlandırılan) sahip hareketli kaplinler k olarak adlandırılır. pilav. 2
). N. Ya. Niberg.
Büyük sovyet ansiklopedisi. - M.: Sovyet Ansiklopedisi. 1969-1978 .
Diğer sözlüklerde "Kinematik çift" in ne olduğunu görün:
Mekanizmanın 2 bağlantısının bağıl hareketlerine izin verir. Bağlantıların yüzeye temas ettiği kinematik çift, alt çift olarak adlandırılır (örneğin, bir dönme menteşesi, bir öteleme kaydırıcısı ve bir kılavuz). Kinematik çift, ... ... Büyük Ansiklopedik Sözlük
kinematik çift- İki bitişik bağlantının, göreli hareketlerine izin veren çift Bağlantısı. [Önerilen terimlerin toplanması. Sayı 99. Mekanizmalar ve makineler teorisi. SSCB Bilimler Akademisi. Bilimsel ve Teknik Terminoloji Komitesi. 1984] Konu teorisi ... ... Teknik Çevirmenin El Kitabı- kinematinė pora durumları T sritis fizika atitikmenys: angl. kinematik çift vok. kinematisches Elementenpaar, n rusya. kinematik çift, f pranc. çift sinematik, f … Fizikos terminų žodynas
Birbirine bağlı iki bağlantının birbiriyle ilişkili olmasına izin veren bağlantı. trafik. Bir linkin başka bir link ile temas edebileceği yüzeylere, çizgilere, noktalara denir. bağlantı elemanları. K. p. alt (temas yüzeyleri) ve daha yüksek olarak ayrılır ... ... Büyük ansiklopedik politeknik sözlük
kinematik çift- kinematik çift Mekanizmanın iki katı gövdesinin, verilen göreceli hareketlerine izin veren bağlantısı. Kod IFToMM: 1.2.3 Bölüm: MEKANİZMALAR VE MAKİNELER TEORİSİNİN GENEL KAVRAMLARI ... Mekanizmalar ve makineler teorisi
çift- kinematik çift; çift İki bitişik bağlantının bağlantısı, onlardan göreli harekete izin verir. birkaç kuvvet; çift sistem iki paralel kuvvetler, mutlak değerde eşit ve zıt yönlere yönlendirilmiş ...
üst çift- Bağlantıların gerekli bağıl hareketinin ancak elemanlarına çizgiler boyunca ve noktalarda dokunularak elde edilebildiği bir kinematik çift ... Politeknik terminolojik açıklayıcı sözlük




 Английский вокруг нас исследовательская работа")
