geometrik statik
İki kuvvetin dengesi: İki kuvvet, büyüklükleri eşit, yönleri zıtsa ve ortak bir etki çizgisine sahiplerse dengeli bir sistem oluştururlar.
Üç kuvvetin dengesi: aynı düzlemde bulunan üç kuvvet, etki çizgileri bir noktada kesişirse dengeli bir sistem oluşturur ve bu kuvvetler üzerinde, kenarlarda olduğu gibi, kapalı bir kuvvet üçgeni oluşturabilirsiniz.
Keyfi bir kuvvetler sisteminin dengesi, eğer ana vektör sistem ve keyfi bir O kutbuna göre ana momenti sıfıra eşittir.
Bu vektör denklemleri denge, altı analitik denge denklemine karşılık gelir. Kuvvetlerin konumuna herhangi bir kısıtlama getirildiğinde, analitik denge denklemlerinin sayısı azalır. Masada. Tablo 1, kuvvetlerin düzenlenmesine ilişkin çeşitli durumlar için analitik denge denklemlerini (ve varyantlarını) göstermektedir.
Sert bir cismin dengesi, ona dengeli bir kuvvet sistemi uygulanırsa gerçekleştirilir.
Değişken (deforme olabilen) bir sistemin kuvvetlerin etkisi altındaki dengesi, şekli, deformasyondan sonra değişken sistemin şekliyle aynı olan (katılaşma aksiyomu) kesinlikle katı bir cismin dengesi olarak düşünülebilir.
Bir cisimler sisteminin dengesi (birbirlerine ve yeryüzüne bağlarla bağlı cisim kümeleri). Bir cisim sistemi için denge denklemlerinin toplam sayısı, her bir cisim için ayrı ayrı denklem sayısının sistemdeki cisim sayısıyla çarpımına eşittir. İÇİNDE toplam sayısı denklemler, iç kuvvetleri içermemeleri farkıyla, bir bütün olarak sistemin denklemlerini içerebilir.
Statik olarak belirlenebilir ve statik olarak belirsiz problemler (sistemler) kavramı. Belirli bir cisim sistemi için bağımsız denge denklemlerinin sayısı, problemdeki bilinmeyenlerin sayısına eşitse, sistem statik olarak belirlidir. Belirli bir sistem için denge denklemlerinin sayısı, problemdeki bilinmeyenlerin sayısından azsa, sistem statik olarak belirsizdir, yani problem statik yöntemlerle çözülemez. Statik denklemlerin sayısı m, problemdeki bilinmeyenlerin sayısından büyükse, sistem değişebilir ve ancak böyle bir yük altında dengede olabilir. m-n denklemler dengeler kimliklere dönüşür. Böyle bir problemi çözerken, her şeyden önce, belirli bir durum için olup olmadığını kontrol etmek gerekir. yük m-n kimliklere denklemler. Problemdeki bilinmeyenlerin sayısı kalan denklemlerin sayısına eşitse sistem dengededir.
Denge denklemlerini derlerken, rasyonel bir eksen seçimi (ve bir düzlem problemi için moment noktaları) yoluyla, denklem sistemini her biri bir bilinmeyenli ayrı denklemlere bölmeye çalışılmalıdır. Bu amaçla Tabloda verilen denge koşulları seçeneklerini kullanabilirsiniz. 1.
Tablo 1. Analitik denge denklemlerinin varyantları
Kuvvetlerin düzeninin özellikleri |
Denklem Sayısı |
Denge denklemlerinin varyantları |
1. Kuvvetler aynı düzlemde bulunur |
||
|
Düz bir çizgi üzerinde uzanan kuvvetler sistemi |
||
|
Yakınsak kuvvetler sistemi (O - kaçış noktası) |
||
|
sistem paralel kuvvetler |
||
|
Buhar sistemi |
||
|
Keyfi düzlem kuvvet sistemi |
||
2. Kuvvetler uzayda bulunur (yalnızca denklemlerin en yaygın değişkenleri belirtilmiştir) |
||
|
Yakınsak kuvvetler sistemi (O - kaçış noktası) |
burada l, m, n şu koşulu karşılayan gelişigüzel eksenlerdir: O noktasından geçerek üç ekseni de kesen düz bir çizgi çizmek imkansızdır |
|
|
Paralel kuvvet sistemi |
||
STATİK
Bölüm I İSTATİĞİN TEMEL KAVRAMLARI VE AKSİYOMLARI
Güç. Kuvvet sistemi. Tamamen rijit bir cismin dengesi
İÇİNDE teorik mekanik maddi cisimlerin birbirine göre hareketi incelenir. Bu, her şeyden önce nesnelerin modellerini oluşturmayı ve mekaniğin ilgilendiği kavramları tanımlamayı gerektirir. Teorik mekanikte, "sıradan" Öklidçi üç boyutlu uzayın en basit modeli ele alınır. Bu uzayda Newton yasalarının geçerli olduğu en az bir koordinat sistemi olduğu varsayılmaktadır ( atalet sistemi ). Çok sayıda deney ve ölçüm, merkezde bir orijine sahip bir referans sisteminin yüksek doğruluk derecesine sahip olduğunu göstermektedir. Güneş Sistemi ve "sonsuz uzaklıkta sabit" yıldızlara yönelik eksenler, bir atalet sistemidir. En az bir atalet sistemi varsa, o zaman sonsuz sayıda vardır. Atalet sistemi, Newton yasalarının geçerli olduğu bir sistemdir. Eylemsiz referans çerçeveleri koşullu olarak adlandırılır hareketsiz .
Statikte, hesaplamalara herhangi bir hata getirmeden, Dünya'ya katı bir şekilde bağlı olan koordinat sistemlerinin hareketsiz olduğunu varsayabiliriz. Diğer ataletsel olmayan referans çerçevelerindeki, özellikle Dünya'ya göre hareket eden sistemlerdeki göreli denge koşulları dinamikte dikkate alınacaktır.
Hem statik hem de dinamik için ana kavramlardan biri kuvvet kavramıdır. Bunun birincil fikri, kas duyumlarımız tarafından verilir.
Mekanikte kuvvet, malzeme gövdelerinin mekanik etkileşiminin bir ölçüsü olarak anlaşılır, bunun sonucunda etkileşen gövdeler birbirine ivme verebilir veya deforme olabilir (şeklini değiştirebilir).
Bu tanımdan kuvvetleri ölçmenin iki yolu hemen çıkar:
Birinci, dinamik bir cismin ivmesini ölçmeye dayalı yöntem atalet sistemi referans;
ikinci, statik elastik cisimlerin deformasyonunun ölçülmesine dayalı yöntem.
Mekanikte kuvvetlerin fiziksel doğası incelenmez. Kuvvetler, cisimlerin doğrudan temasından kaynaklanabilir (örneğin, bir elektrikli lokomotifin arabalara iletilen çekiş kuvveti, temas eden cisimlerin yüzeyleri arasındaki sürtünme kuvveti). Kuvvetler ayrıca belli bir mesafeden de ortaya çıkar (örneğin, çekim kuvvetleri gök cisimleri, elektrik yüklü veya mıknatıslanmış parçacıkların etkileşim kuvvetleri, vb.).
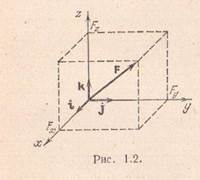
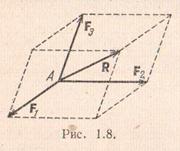
Kuvvet bir vektör miktarıdır - sayısal bir değer veya modül, uygulama noktası ve yön ile karakterize edilir. Kuvvetin uygulama noktası ve yönü, kuvvetin etki çizgisini belirler. Şek. 1.1 gücü gösterir F, noktaya uygulandı A segment uzunluğu AB karşılık gelen ölçekte kuvvet modülüne eşittir, nokta İÇİNDE gücün sonu denir; gücün sonunda; kuvvetin sonuna kuvvetin yönünü gösteren bir ok yerleştirilmiştir. Dümdüz LM isminde kuvvet hattı. Kuvveti kalın harfle belirtmeyi kabul edelim, örneğin, F ve aynı normal yazı tipi harfiyle modülü, yani F.
Kuvvet modülünü ölçmek için birim olarak seçilen bazı kuvvetlerle karşılaştırılır. İÇİNDE uluslararası sistemölçü birimleri fiziksel özellikler(SI) kuvvet birimi bir newton'dur (1 H) ve teknik birimler sisteminde (ICGSS sistemi) - bir kilogram kuvvet (1 kilogram veya 1 kgf - SI-1 kütle birimi ile karıştırılmamalıdır kilogram). Bu birimler ilişkilerle ilişkilidir.
1 kilo ≈ 9,81 H; 1 H ≈ 0,102 kilogram.
 Kuvvetlerin maddi cisimler üzerindeki etkisini göz önünde bulundurarak, sadece kuvvetlerin fiziksel doğasını değil, cisimlerin birçok özelliğini de soyutlayacağız. Bu nedenle, gerçek katılar, kendilerine uygulanan kuvvetlerin etkisi altında genellikle şeklini çok az değiştirir. Bu nedenle, mekanikteki birçok problemi çözmek için, küçük deformasyonları (yani, küçük şekil değişikliklerini) tamamen ihmal etmek ve modeli kullanmak mümkündür. kesinlikle sert gövde. Kesinlikle katı bir cisim, herhangi iki noktası arasındaki mesafelerin belirli kuvvetlerin etkisinden bağımsız olarak değişmeden kaldığı bir cisimdir.
. Kısaca, "katı cisim" veya hatta sadece "cisim" ifadesini, az önce tanıtılan mutlak katı cisim kavramını akılda tutarak kullanacağız.
Kuvvetlerin maddi cisimler üzerindeki etkisini göz önünde bulundurarak, sadece kuvvetlerin fiziksel doğasını değil, cisimlerin birçok özelliğini de soyutlayacağız. Bu nedenle, gerçek katılar, kendilerine uygulanan kuvvetlerin etkisi altında genellikle şeklini çok az değiştirir. Bu nedenle, mekanikteki birçok problemi çözmek için, küçük deformasyonları (yani, küçük şekil değişikliklerini) tamamen ihmal etmek ve modeli kullanmak mümkündür. kesinlikle sert gövde. Kesinlikle katı bir cisim, herhangi iki noktası arasındaki mesafelerin belirli kuvvetlerin etkisinden bağımsız olarak değişmeden kaldığı bir cisimdir.
. Kısaca, "katı cisim" veya hatta sadece "cisim" ifadesini, az önce tanıtılan mutlak katı cisim kavramını akılda tutarak kullanacağız.
Birden çok gücün birleşimi F1,…, fn) kuvvetler sistemi olarak adlandırılır. Vücudun durumunu ihlal etmeden, bir kuvvet sistemi (F1,…, fn) başka bir sistemle değiştirilebilir (P1,…, pk) ve tam tersi, bu tür sistemlere eşdeğer denir. Sembolik olarak, bu şu şekilde gösterilir:
(F1,…, fn) = (P1,…, pk).
Kuvvet sistemlerinin eşdeğerliği kavramı, iki sistemin eşdeğer olacağı koşulları oluşturmaz. Bu sadece eşdeğer kuvvet sistemlerinin cismin aynı durumuna (aynı ivmelere veya cisim mutlak katı değilse aynı deformasyonlara) neden olduğu anlamına gelir.
kuvvetler sistemi ne zaman(F1,…, fn) bir R kuvvetine eşdeğerdir, yani
(F1,…, fn) = R,
ikincisine verilen kuvvetler sisteminin bileşkesi denir. Bu, bir bileşke kuvvetin tüm bu kuvvetlerin eyleminin yerini alabileceği anlamına gelir. Her kuvvet sisteminin bileşkesi yoktur.
Daha önce belirtildiği gibi, atalet koordinat sisteminde atalet yasası karşılanır. Bu, özellikle şu anlama gelir: başlangıçta hareketsiz olan cisim, üzerine başka bir kuvvet etki etmedikçe bu durumda kalır.
Kesinlikle katı bir cisim, üzerindeki bir kuvvetler sisteminin etkisi altında hareketsiz kalırsa(F1,…, fn), o zaman ikincisine dengeli bir kuvvetler sistemi veya sıfıra eşdeğer bir kuvvetler sistemi denir:
(F1,…, fn) = 0.
Bu durumda sık sık söylenir ki vücut dengededir.
1.2. Statik aksiyomları ve sonuçları
Statik aksiyomlarında, aynı gövdeye etki eden kuvvetlere veya etkileşen cisimlere uygulanan kuvvetlere tabi olan en basit ve genel yasalar formüle edilir. Bu yasalar, çok sayıda doğrudan gözlemle ve ayrıca bu aksiyomlardan mantıksal olarak çıkan sonuçları (genellikle uzak ve hiç de açık olmayan) kontrol ederek oluşturulmuştur.
Newton'un ikinci yasasından da anlaşılacağı gibi, bir kuvvetin etkisi altındaki cisim ivme kazanır ve bu nedenle hareketsiz olamaz. Bu, bir kuvvetin dengeli bir kuvvetler sistemi oluşturamayacağı anlamına gelir. İlk aksiyom, hangi koşullar altında en basit sistem kuvvetler dengelenecektir.
aksiyom 1. Kesinlikle rijit bir cisme uygulanan iki kuvvet, ancak ve ancak mutlak değerde eşitlerse, tek bir düz çizgi üzerinde hareket ederlerse ve zıt yönlere yönlendirilirlerse dengelenecektir (sıfıra eşdeğer).
Bu, kesinlikle katı bir cisim iki kuvvetin etkisi altında hareketsizse, bu kuvvetlerin mutlak değerde eşit olduğu, bir düz çizgide hareket ettiği ve zıt yönlere yönlendirildiği anlamına gelir. Tersine, eğer kesinlikle katı ısı, bir düz çizgide zıt yönlerde iki tarafından etki edilirse eşit kuvvetler ve vücut ilk anda hareketsizdi, sonra 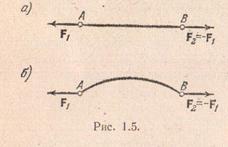 vücudun dinlenme durumu korunacaktır.
vücudun dinlenme durumu korunacaktır.
Şek. 1.4, şu ilişkileri sağlayan dengeli kuvvetleri gösterir: (F1, F2) = 0, (P1, P2) = 0.
Bazı statik problemlerini çözerken, ağırlıkları ihmal edilebilecek ve çubukların dengede olduğu bilinen rijit çubukların uçlarına uygulanan kuvvetleri dikkate almak gerekir. Formüle edilmiş aksiyomdan, böyle bir çubuk üzerindeki kuvvetlerin, çubuğun uçlarından geçen düz bir çizgi boyunca yönlendirildiği, zıt yönde ve mutlak değerde birbirine eşit olduğu sonucu çıkar. Bu sonuç, çubuğun ekseni eğrisel ise de geçerlidir.
İlk aksiyom, yalnızca iki kuvveti dengelemek için gerekli ve yeterli koşulları oluşturur, ancak, elbette, dengeli bir kuvvetler sistemi de şunlardan oluşabilir: Daha kuvvetler.
Sonraki iki aksiyom, vücudun durumunun değişmediği kuvvetlerle en basit eylemleri oluşturur.
Aksiyom 2. Kesinlikle rijit bir cismin durumunu bozmadan, kuvvetler ona ancak ve ancak dengeli bir sistem oluşturduklarında, özellikle de bu sistem mutlak değerde eşit, tek bir düz çizgi boyunca hareket eden iki kuvvetten oluşuyorsa uygulanabilir veya reddedilebilir. ve zıt yönlere yönlendirilir.
Sonuç, bu aksiyomdan çıkar: Vücudun durumunu ihlal etmeden, kuvvet uygulama noktası, hareket hattı boyunca aktarılabilir.
Bu sonuç gösteriyor ki Tamamen rijit bir cisme uygulanan kuvvet, kayan bir vektördür.
Hem aksiyomlar hem de kanıtlanmış sonuç deforme olabilen gövdelere uygulanamaz, özellikle, kuvvet uygulama noktasının hareket çizgisi boyunca transferi, cismin stres-uzama durumunu değiştirir.
 Aksiyom 3. Cismin durumunu değiştirmeden, noktalarından birine uygulanan iki kuvvet, aynı noktaya uygulanan ve geometrik toplamlarına eşit olan bir bileşke kuvvetle değiştirilebilir.(kuvvetlerin paralelkenarının aksiyomu).
Aksiyom 3. Cismin durumunu değiştirmeden, noktalarından birine uygulanan iki kuvvet, aynı noktaya uygulanan ve geometrik toplamlarına eşit olan bir bileşke kuvvetle değiştirilebilir.(kuvvetlerin paralelkenarının aksiyomu).
Bu aksiyom iki durum oluşturur:
ilk - iki kuvvet F1 Ve F2, bir noktaya uygulandı, bir bileşke var, yani bir kuvvete eşdeğer
(F1, F2) = R;
ikincisi - aksiyom, modülü, uygulama noktasını ve bileşke kuvvetin yönünü tamamen belirler
R = F1 + F2.
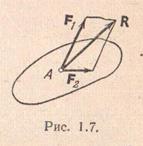
Başka bir deyişle, elde edilen R kenarları çakışan bir paralelkenarın köşegeni olarak oluşturulabilir F1 Ve F2.
Üçüncü aksiyomun, kesinlikle katı olması gerekmeyen herhangi bir cisim için geçerli olduğuna dikkat edin.
 Statiğin ikinci ve üçüncü aksiyomları, bir kuvvetler sisteminden ona eşdeğer başka bir sisteme geçmeyi mümkün kılar. Özellikle, kişinin herhangi bir kuvveti genişletmesine izin verirler. R iki, üç vb. için bileşenler, yani kuvvetin olduğu başka bir kuvvetler sistemine gitmek R sonuçtur. Örneğin, iki yön belirleyerek R bir düzlemde, köşegenin kuvveti temsil ettiği bir paralelkenar oluşturabilirsiniz R. Daha sonra paralelkenarın kenarları boyunca yönlendirilen kuvvetler, bunun için bir sistem oluşturacaktır. R sonuç olacaktır. Benzer bir yapı uzayda gerçekleştirilebilir. Bunun için kuvvet uygulama noktasından itibaren yeterlidir. R aynı düzlemde olmayan üç çizgi çizin ve bunların üzerine kuvveti temsil eden köşegen ile bir paralel yüz oluşturun R ve bu çizgiler boyunca yönlendirilmiş kenarlarla.
Statiğin ikinci ve üçüncü aksiyomları, bir kuvvetler sisteminden ona eşdeğer başka bir sisteme geçmeyi mümkün kılar. Özellikle, kişinin herhangi bir kuvveti genişletmesine izin verirler. R iki, üç vb. için bileşenler, yani kuvvetin olduğu başka bir kuvvetler sistemine gitmek R sonuçtur. Örneğin, iki yön belirleyerek R bir düzlemde, köşegenin kuvveti temsil ettiği bir paralelkenar oluşturabilirsiniz R. Daha sonra paralelkenarın kenarları boyunca yönlendirilen kuvvetler, bunun için bir sistem oluşturacaktır. R sonuç olacaktır. Benzer bir yapı uzayda gerçekleştirilebilir. Bunun için kuvvet uygulama noktasından itibaren yeterlidir. R aynı düzlemde olmayan üç çizgi çizin ve bunların üzerine kuvveti temsil eden köşegen ile bir paralel yüz oluşturun R ve bu çizgiler boyunca yönlendirilmiş kenarlarla.
Aksiyom 4 (Newton'un 3. yasası). İki cismin etkileşim kuvvetleri mutlak değerde eşittir ve bir düz çizgi boyunca zıt yönlerde yönlendirilir.
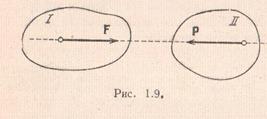 İki cisim arasındaki etkileşim kuvvetlerinin, farklı cisimlere uygulandıklarından, dengeli bir kuvvetler sistemi oluşturmadığına dikkat edin.
İki cisim arasındaki etkileşim kuvvetlerinin, farklı cisimlere uygulandıklarından, dengeli bir kuvvetler sistemi oluşturmadığına dikkat edin.
 ile gösterilirse F Güneş'in Dünya'yı çektiği kuvvet, ardından Dünya da Güneş'i aynı katsayı ile çeker, ancak zıt yönlü kuvvet - F.
ile gösterilirse F Güneş'in Dünya'yı çektiği kuvvet, ardından Dünya da Güneş'i aynı katsayı ile çeker, ancak zıt yönlü kuvvet - F.
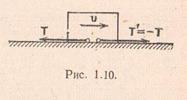
Bir vücut bir düzlem boyunca hareket ettiğinde, ona bir sürtünme kuvveti uygulanacaktır. T, hareketin tersi yönde yönlendirilmiştir. Bu, sabit düzlemin vücuda etki ettiği kuvvettir. Aksiyom 4'e göre, cisim düzlem üzerinde aynı kuvvetle hareket eder, ancak yönü kuvvetin tersi olacaktır. T.
Aksiyom 5. Deforme olabilen bir cismin dengesi, noktaları birbirine rijit bir şekilde bağlıysa bozulmaz ve cismin mutlak rijit olduğu kabul edilir.
Bu aksiyom (bazen kürleme prensibi ) ne zaman kullanılır Konuşuyoruz katı kabul edilemeyen cisimlerin dengesi hakkında. Bu tür organlara bağlı dış kuvvetler rijit bir cismin denge koşullarını sağlamalıdır, ancak rijit olmayan cisimler için bu koşullar sadece gereklidir, ancak yeterli değildir. Bu durumu basit bir örnekle açıklayalım. Kesinlikle rijit ağırlıksız bir çubuğun dengesi için çubuğun uçlarına uygulanan kuvvetlerin yeterli ve gerekli olması gerekir. F Ve F" uçlarını birleştiren düz bir çizgi boyunca hareket etti, mutlak değerde eşitti ve farklı yönlere yönlendirildi. Aynı koşullar, ağırlıksız bir ipliğin bir bölümünün dengesi için gereklidir, ancak bir iplik için yetersizdir - ek olarak gereklidir İplik üzerine etkiyen kuvvetlerin çekme, bir çubuk için ise sıkıştırma olmasını gerektirir.
Sonuç olarak, rijit bir cisme uygulanan paralel olmayan üç kuvvetin sıfıra denk olduğu durumu ele alalım.
Paralel olmayan üç kuvvet hakkındaki teorem. Üç kuvvetin etkisi altında vücut dengedeyse ve iki kuvvetin etki çizgileri kesişiyorsa, o zaman tüm kuvvetler aynı düzlemde bulunur ve bunların etki çizgileri bir noktada kesişir.
Vücuda üç kuvvetten oluşan bir sistemin etki etmesine izin verin F1, F2 Ve F3, ve kuvvetlerin hareket hatları F1 Ve F2 bir noktada kesişmek A. Aksiyom 2'nin sonucuna göre, kuvvetler F1 Ve F2 noktaya taşınabilir A ve aksiyom 3'e göre bir kuvvetle yer değiştirebilirler R, Ve
R=F1+F2.
Böylece,
dikkate alınan kuvvetler sistemi iki kuvvete indirgenir R Ve F3. Teoremin koşullarına göre cisim dengededir, bu nedenle aksiyom 1'e göre kuvvetler R Ve F3 ortak bir hareket çizgisine sahip olmalıdır, ancak bu durumda üç kuvvetin de hareket çizgileri bir noktada kesişmelidir.
Problem çözme örnekleri
Problem çözme sırası:
- Dengesi dikkate alınması gereken bir cisim (nokta) seçin.
- Gövdeyi (menteşeyi) bağlardan kurtarın ve ona etki eden aktif kuvvetleri ve atılan bağların reaksiyonlarını gösterin. Ayrıca, çubukların gerildiğini varsaymak alışılmış olduğundan, çubukların tepkileri menteşeden uzağa yönlendirilmelidir.
- Koordinat eksenlerini seçin ve ∑Xi = 0 düzleminde yakınsak kuvvetler sistemi için denge koşullarını kullanarak denge denklemlerini oluşturun; ∑Yi = 0. Koordinat eksenlerini seçerken, eksenlerden birinin bilinmeyen kuvvetlerden birine dik olması durumunda ortaya çıkan denklemlerin çözülmesinin daha kolay olacağı dikkate alınmalıdır.
- Belirtilen denklem sisteminin çözümünden çubukların reaksiyonlarını belirleyin.
- Yeni seçilen x ve y koordinatları için denge denklemlerini çözerek elde edilen sonuçların doğruluğunu kontrol edin.
Örnek 1. Yük, çubuklar ve halatlar üzerinde asılıdır ve dengededir (Şekil 1.13). Menteşeye etki eden kuvvetler sistemini gösteriniz A.
Çözüm
1. Çubukların reaksiyonları çubuklar boyunca yönlendirilir, esnek bağların reaksiyonları iplikler boyunca gerginlik yönünde yönlendirilir (Şekil 1.13, a).
2. Çubuklardaki kuvvetlerin tam yönünü belirlemek için, 1 ve 2 numaralı çubukları zihinsel olarak arka arkaya kaldırırız, noktanın olası yer değiştirmelerini analiz ederiz. A.
Üzerine etki eden kuvvetlerle sabit bir blok düşünmüyoruz.
3. Çubuk 1'i çıkarın, nokta A yükselir ve duvardan uzaklaşır, dolayısıyla 1. çubuğun reaksiyonu duvara yöneliktir.
4. Çubuk 2'yi çıkarın, nokta A yükselir ve duvara yaklaşır, bu nedenle, çubuğun 2 reaksiyonu duvardan aşağı doğru yönlendirilir.
5. İp sağa doğru çeker.
6. Bağlardan kurtulduk (Şekil 1.13, b).
Örnek 2 Top bir ipliğe asılır ve bir duvara dayanır (Şekil 1.14a). Bir ipliğin ve düz bir desteğin (duvarın) tepkilerini belirleyin.
Çözüm
1. İplik reaksiyonu - iplik boyunca noktaya İÇİNDE yukarı (Şekil 1.14, b).
2. Pürüzsüz bir desteğin (duvarın) reaksiyonu - desteğin yüzeyinden normal boyunca.
Örnek 3 Bunu yatay olarak yerleştirilmiş bir çubukta hayal edin AB, kendi kütlesini ihmal eden düşey yük F, bir noktada uygulanan İLE kereste (Şek. 1.14-1, A). Kirişin sol ucu A bir menteşe ile desteğe bağlı ve sağ İÇİNDE düzgün eğimli bir düzlem üzerinde durur.
Çubuğu şematik olarak bir segment olarak gösterelim AB,şek. 1.14-1, B, ve bu noktada ona uygulayın İLE dikey kuvvet F. Noktada İÇİNDE yandan eğik düzlem tepkisi çubuğa uygulanır RB, düzleme dik olarak yönlendirilmiş; eylem hatları F Ve RB bir noktada kesişmek HAKKINDA. Bu kuvvetlere ek olarak, kirişe başka bir kuvvet etki eder - menteşeli-sabit desteğin tepkisi. Ve çubuk dengede olduğundan, üçüncü kuvvetin etki çizgisi de bu noktadan geçecektir. HAKKINDA, yani reaksiyon R menteşeli ama sabit destek, segment boyunca yönlendirilir AO.
Burada kullanılan muhakeme yöntemine denir. vücudu bağlardan kurtarma ve bağları reaksiyonlarıyla değiştirme ilkesi.
Örnek 4Çubuktaki kuvveti belirleyin CD ve yük basıncı A referans düzleminde EF(Şekil 1.14-2, a). Çubuk ağırlığı CD, engellemek İLE, ipin ve ipin blok üzerindeki sürtünmesinin ihmal edilmesi.
Çözüm
Halatın tüm noktalarındaki gerilimi aynıdır ve yükün yerçekimi kuvvetine eşittir. İÇİNDE,çünkü sabit blok sadece halata etki eden kuvvetin yönünü değiştirir.
Sistemin dengesini düşünün: çubuk CD ve engelle İLE ML. Bağlantıları atalım ve eylemlerini karşılık gelen reaksiyonlarla değiştirelim (Şekil 1.14-2, 6). Ortaya çıkan kuvvet sistemi için yalnızca bir denge denklemi çizilebilir:
Şek. 1.14-2, yüke etki eden kuvvetleri gösterir A yanında bir ip parçasıyla O. REF - destek düzlemi reaksiyonu.
çünkü kargo A dengede, o zaman
![]()
Ref \u003d Pa - Pv \u003d 600 - 400 \u003d 200 N.
A yükünün RA destek düzlemindeki basınç kuvveti, Şekil 1.14-2, d'de gösterilmiştir.Açıkçası, RA = R EF = 200 H (etki kuvveti, reaksiyon kuvvetine eşittir).
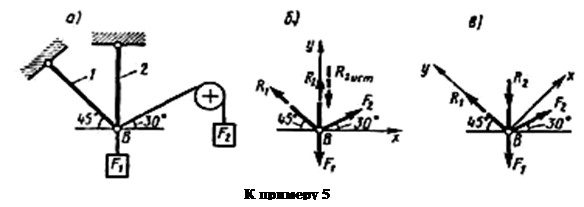
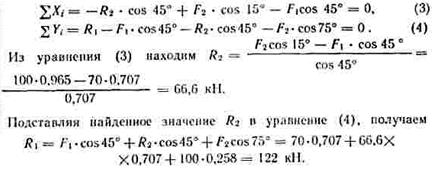
Örnek 5 F 1 = 70 kN ve F 2 = 100 kN yükleri tutan çubukların tepkilerini belirleyin (Şekil a). Çubukların kütlesini ihmal ediniz.
 |
Çözüm
1. B menteşesinin dengesini düşünün (Şekil a).
2. Menteşe B'yi bağlardan kurtarıyoruz ve ona etki eden aktif kuvvetleri ve bağların reaksiyonlarını gösteriyoruz (Şekil b).
3. Y eksenini C yönünde R 2 reaksiyonuyla hizalayarak bir koordinat sistemi seçiyoruz (Şekil b) ve B menteşesine etki eden kuvvetler sistemi için denge denklemlerini oluşturuyoruz:
3. Denklemleri çözerek R 1 ve R 2 çubuklarının reaksiyonlarını belirleriz.
Bulunan R 1 değerini denklem (2) ile değiştirerek, elde ederiz
R2 değerinin önündeki eksi işareti, başlangıçta seçilen reaksiyon yönünün yanlış olduğunu gösterir - R2 reaksiyonu ters yöne, yani yönlendirilmelidir. menteşe B'ye (Şekil b'de, R2 reaksiyonunun gerçek yönü kesikli bir vektörle gösterilmiştir).
5. x ve y koordinat eksenlerinin yeni bir konumunu seçerek elde edilen sonuçların doğruluğunu kontrol ediyoruz (Şekil a). Bu eksenlere göre denge denklemlerini oluştururuz:
(1) ve (2) denklemlerinin çözülmesiyle elde edilen R 1 ve R 2 reaksiyonlarının değerleri, (3) ve (4) denklemlerinden bulunan değerlerle büyüklük ve yön olarak örtüşür, bu nedenle problem çözülür doğru şekilde.
Kontrol soruları ve görevleri
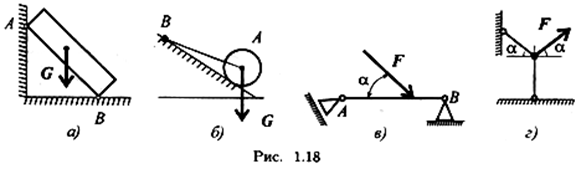
1. Verilen kuvvet sistemlerinden hangisi (Şekil 1.15) dengelenmiştir?
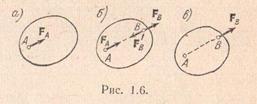
3. Gövde 1 ve 2 (Şekil 1.17) dengededir. Cisimler kesinlikle rijit ise kuvvetlerin çalışma sistemlerini ortadan kaldırmak mümkün müdür? Bedenler gerçek, deforme olabilirse ne değişecek?
4. Belirtin olası yön desteklerdeki reaksiyonlar (Şekil 1.18).
Huygens-Steiner teoremini uygulamak için atalet momentini bilmeniz gerekir. BEN İle ağırlık merkezinden (atalet merkezi) geçen SS eksenine göre gövde. Bu moment, CC ekseninin yönüne bağlıdır. Ancak hesaplamaya gerek yok BEN İle formüle göre veya her eksen için tekrar ölçün.
Görünüşe göre herhangi biri için sağlam vücut atalet merkezinden (cismin ana eksenleri) geçen karşılıklı olarak dik üç eksen vardır, öyle ki SS'nin herhangi bir ekseni etrafındaki atalet momenti, cismin atalet momentleri yoluyla ifade edilir I 1 , I 2 ve I 3 bu ana eksenlere göre. Böylece, keyfi bir eksene göre bir cismin atalet momentini belirleme görevi, ana eksenleri ve karşılık gelen Iı, I2 ve I3 atalet momentlerini belirlemeye indirgenir.
Belirli bir rijit cismin asal atalet eksenleri nasıl bulunur? Homojen simetrik gövdeler için (top, küp, silindir, dikdörtgen paralel yüzlü vb.) Ana eksenlerin belirlenmesi kolaydır.Bu tür gövdelerin ana atalet eksenleri her zaman gövdenin simetri eksenleriyle çakışır. Örneğin, homojen bir dikdörtgen paralel borunun ana eksenleri, yüzlere dik olan geometrik merkezinden geçer. (resim 4)
Homojen bir top için merkezinden geçen birbirine dik herhangi üç eksen esastır.Homojen bir küpün de aynı özelliğe sahip olduğu ispatlanabilir.Cisimler için karmaşık şekil ana eksenleri ve atalet momentleri, daha karmaşık deneysel ve teorik yöntemlerle bulunabilir.
Şekil 4 Dikdörtgen bir paralel borunun ana atalet eksenleri
4.6 Dönen bir cismin kinetik enerjisi
keyfi kinetik enerji Ben-kütle ile malzeme noktası M Ben; eşittir
 ,
(16)
,
(16)
Nerede υ Ben= ωr Ben- hız maddi nokta, ω - açısal hız, r Ben- noktadan dönme eksenine olan mesafe. Tüm maddi noktaların kinetik enerjilerini toplayarak katı bir cismin kinetik enerjisini elde ederiz:
Formül (2 8), gövde sabit bir eksen etrafında döndüğünde geçerlidir. Vücut bir bütün olarak hareket ediyorsa ve hala dönüyorsa, o zaman kinetik enerjiöteleme ve dönme hareketlerinin kinetik enerjilerinin toplamı olarak temsil edilebilir.
 (18)
(18)
Nerede V C katı cismin kütle merkezinin (eylemsizlik merkezi) hızıdır; BEN C, açısal hız vektörüne paralel olarak kütle merkezinden geçen eksene göre atalet momentidir.
4.8 Bir cismin yay üzerindeki salınımları. Küçük dalgalanma denklemi
Sistem dengeden çıktıktan sonra sistemin iç kuvvetlerinin etkisi altında serbest salınımlar gerçekleştirilir. Serbest titreşimlere bir örnek, bir yay üzerindeki yükün titreşimleridir.
Harmonik yasasına göre serbest salınımların oluşabilmesi için, cismi denge pozisyonuna döndürme eğiliminde olan kuvvetin, cismin denge pozisyonundan yaptığı yer değiştirme x ile orantılı olması gerekir.
Bu koşul, F x = -kx yayının elastik kuvveti tarafından karşılanır. K katsayısına yayın sertliği denir. Bu koşulu sağlayan diğer tüm kuvvetlere yarı elastik denir.
Elastik bir yaya bağlı bir gövde dengeden çıkarılırsa, yaydan gelen elastik bir kuvvet vücut üzerinde hareket etmeye başlar ve bu, Hooke yasasına göre vücudun denge konumundan sapmasıyla orantılıdır. Hooke yasasının yalnızca denge konumundan küçük sapmalar için geçerli olduğu unutulmamalıdır (nicel olarak, bu x eşitsizliği ile ifade edilir).<< ben, Nerede ben gerilmemiş yayın uzunluğu, x yayın uzantısıdır).
Esnek bir kuvvetin etkisi altındaki hareket denklemi şu şekildedir:
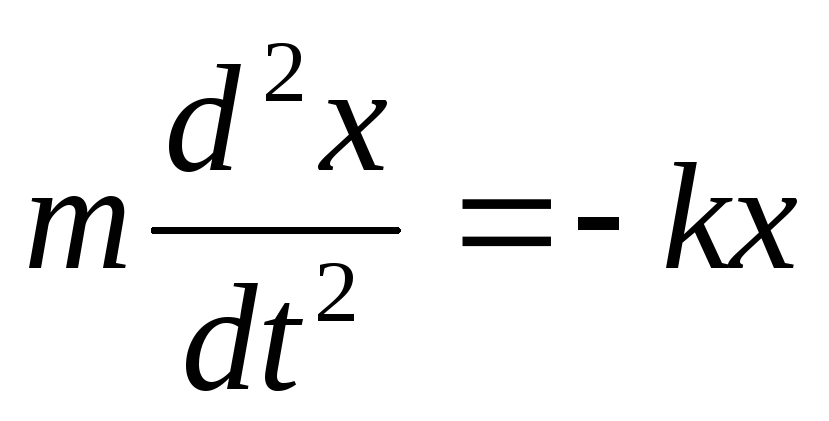 (19)
(19)
ω 2 = k/ gösterimini getirerek başka bir biçimde yeniden yazılabilir. M. Daha sonra
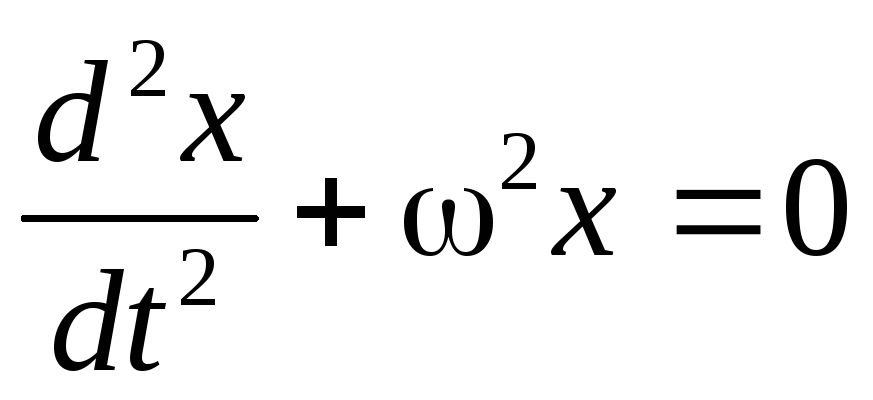 (20)
(20)
Bu denklemle tanımlanan salınım yapan sisteme harmonik osilatör denir. ω değerine doğal dairesel salınım frekansı denir. Yay yükü için
 ; (21)
; (21)
Harmonik salınımlar yasaya göre oluşur
 , (22)
, (22)
burada x 0 ve φ 0 salınımların genliği ve ilk fazıdır. Bu miktarlar başlangıç koşullarına bağlıdır.
Harmonik salınımlarla kinetik ve potansiyel enerji periyodik olarak değişir, ancak direnç kuvvetlerinin olmadığı kapalı bir sistemin toplam mekanik enerjisi E değişmez.
Yay yükü için
 ;
;
 ;(23)
;(23)
 (24)
(24)
Harmonik salınımlarda, kinetik enerjinin potansiyel enerjiye periyodik olarak dönüşümü vardır ve bunun tersi de geçerlidir.
Sürtünme (direnç) kuvvetlerinin varlığında sistemin toplam enerjisi zamanla azalır ve salınımlar sönümlenir.
Direnç kuvveti hız ile orantılıysa (viskoz sürtünme) F tr \u003d - bυ, salınım genliği A yasaya göre azalır
bir = x0 e- δt , burada δ=b/2 M (25)
δ sabiti, sönümleme faktörü olarak adlandırılır. Genliğin azaldığı τ = 1/δ zaman aralığı e≈2,7 kat bozunma süresi olarak adlandırılır.




: nasıl yapılır, konum, örnekler, şablonlar, tasarım örnekleri ücretsiz indir")
