Taşıma insanlı uzay aracı Soyuz TMA-M. İlk Soyuz MS uçuşu: yarım asırlık evrim
23 Nisan 1968'de 11A511 fırlatma aracı, Soyuz adlı yeni bir 7K-OK uzay aracını düşük Dünya yörüngesine fırlattı. Gemi, SSCB pilot kozmonotu Gero tarafından yönetildi. Sovyetler Birliği Vladimir Komarov. Uçuş sırasında, programın azalmasına neden olan tasarım kusurları nedeniyle birçok arıza ortaya çıktı. Ve 24 Nisan'da yörüngeden inerken bir felaket meydana geldi - iniş aracının kurtarma sistemi başarısız oldu. Yere çarpmaktan düştü ve astronot ne yazık ki öldü. Bu, ilk insanlı uzay uçuşu kazasıydı.
Yeninin kaderi trajik bir şekilde başladı uzay gemisi.
Gelecekte, geliştiricilerin ve testçilerin sıkı çalışmaları sayesinde, uzay aracı ve fırlatma aracı defalarca geliştirildi ve yüksek derecede güvenilirliğe getirildi. Uzay gemilerinde yeni modifikasyonlar yaratıldı - bunlar Soyuz T ve Soyuz TM'nin yanı sıra onlar için fırlatma araçları - Soyuz U ve Soyuz U-2. Salyut ve Mir uzun vadeli yörünge istasyonlarının programları ve ayrıca uluslararası bir mürettebatın ilk uçuşunun gerçekleştiği Sovyet-Amerikan Soyuz-Apollo programı kapsamında insanlı uçuşlar için tasarlandılar. Şu anda, uzay aracı ve fırlatma aracı, Uluslararası Uzay İstasyonunu desteklemeye hizmet ediyor.
18 Mayıs 1991'de Mir uzay istasyonuna uçan Soyuz TM-12 uzay aracını düşük Dünya yörüngesine fırlatan Soyuz U-2 fırlatma aracının çizimlerini sunuyoruz. Uluslararası mürettebatta iki SSCB kozmonotu Anatoly Artsebarsky, Sergey Krikalev ve İngiliz kadın Helen Sharman vardı. Bu roket, Alexander Levykh'in Moskova Şehir Çocuk Sarayı (Gençlik) yaratıcılığının roket ve uzay modelleme laboratuvarında model kopyasının bir kopyasını oluşturması için bir prototip görevi gördü ve Rusya, Avrupa ve dünyanın şampiyonu olmasına yardımcı oldu. .
Soyuz fırlatma aracının (LV) tarihi, 1960 yılında, roket ve uzay sistemlerinin baş tasarımcısı S.P. Korolev'in önderliğinde OKB-1'in daha sonra Molniya olarak adlandırılan dört aşamalı bir fırlatma aracı geliştirmeye başlamasıyla başladı. Bu fırlatma aracının çok çeşitli görevleri çözmesi gerekiyordu: gezegenler arası istasyonları başlatmaktan telekomünikasyon yapay dünya uydularını Dünya'ya yakın yörüngelere fırlatmaya kadar. 11A57 endeksini alan üç aşamalı versiyonu, Zenit-4 ağır keşif uydularını düşük Dünya yörüngelerine fırlatmayı amaçlıyordu.
Ünlü kraliyet "yedi", PH 11А57'nin temeli oldu. Yeni geliştirilen güçlü 3. aşama - füze bloğu (RB) I - 2.66 m çapa ve 6.745 m gövde uzunluğuna sahipti, kıtalararası 2. aşamanın tasarımına ve motoruna dayanıyordu. balistik füze R-9. 30 tonluk bir itme ile "açık" şemanın dört odacıklı sıvı yakıtlı roket motoru (LRE) RD-0110, her iki alt aşamada olduğu gibi sıvı oksijen ve gazyağı üzerinde çalıştı ve 330 s'lik belirli bir dürtüye sahipti. Motor, baş tasarımcı S.A. Kosberg'in önderliğinde Voronezh tasarım bürosu tarafından geliştirildi.
Blok I, küresel bir yakıt deposu, bir alet bölmesi, bir oksitleyici deposu ve bir kuyruk bölmesinden oluşuyordu. Tasarımının özellikleri, ağırlığı önemli ölçüde azaltmaya izin verdi. Geleneksel bir güç çerçevesi olmayan motor, oksitleyici tankının dibine takıldı ve kuyruk bölmesi çıkarılabilirdi. Uçuş kontrolü, LRE turbo pompa ünitesinden egzoz gazının salındığı dört direksiyon nozulu tarafından gerçekleştirildi. 2. ve 3. aşamaların ayrılması “sıcak şemaya” göre (yani 2. aşamanın motoru çalışırken) gerçekleşti ve 5-10 saniye sonra bloğun kuyruk bölmesi de düştü, üç bölüme ayrılmıştır. Üç aşamalı taşıyıcı, 5,9 tona kadar ağırlığa sahip bir yükü Dünya'ya yakın yörüngelere fırlatmayı mümkün kıldı ve ilk çok koltuklu uydu gemileri Voskhod ve Voskhod-2'yi başlatmak için kullanıldı. İkincisinin uçuşu sırasında, Mart 1965'te kozmonot Alexei Arkhipovich Leonov dünyada ilk kez uzaya gitti.
Mart 1963'te OKB-1, hedeflerinden biri Ay'a insanlı bir uçuş olan yörüngede bir montaj ve manevra kompleksinin taslak tasarımını tamamladı. Kompleks şunları içeriyordu: 7K uzay aracı, yörüngede yakıt ikmali yapılan 9K uzay roketi ve 11K tanker. Gelecekte, kompleksin şeması tekrar tekrar değiştirildi ve sonunda bir yörünge istasyonu, insanlı (Soyuz) ve nakliye (İlerleme) gemilerinden oluşan modern bir yapıya dönüştürüldü.
İnsanlı uzay aracı 7K-OK üç bölümden oluşuyordu. Önde, yerleştirme istasyonu ve geçiş kapağı olan bir ev bölmesi (BO) vardı. Arkasında, kozmonotların kabini olarak hizmet veren iniş aracı (SA) var. Sonraki - yere inerken uçuş yolunu, demirlemeyi ve frenlemeyi değiştirmek için tasarlanmış kontrol cihazlarını, yakıt tanklarını ve geminin düzeltici tahrik sistemini barındıran alet-toplama bölmesi. Geminin fırlatma ağırlığı 6,46 ila 6,56 ton arasında değişiyordu.
Fırlatma aracı 11A511 (11A57'ye kıyasla) çıkış yükünün kütlesini 6,5 tona yükseltti ve acil kurtarma sistemi değişti. Bunu yapmak için, roket ekvator düzlemine 51.5 derecelik bir eğimle fırlatıldı, 150 kg'a kadar hafifletilen bir telemetri sistemi kullanıldı ve en az 252 s yakın belirli bir dürtü ile merkezi bloklar için ayrı bir motor seçimi zemin ve 315 s boşlukta gerçekleştirilmiştir. Taşıyıcının tasarım iyileştirmeleri minimum düzeydeydi - yük ile 3. aşamanın (blok I) yerleştirme ünitesi ve kafa kaplamasının (GO) şekli değiştirildi.
11A511 fırlatma aracı, 1. ve 2. aşamaların bir roket bloğu paketi, 3. aşama (blok I) ve aktif alanda bir burun kaplaması ile kapatılan uzay aracı 7K-OK'den oluşuyordu, bunun üzerine tahrik sistemi acil kurtarma sistemi bulundu ( DU SAS). Fırlatma aracının uzunluğu 49.913 m, fırlatma ağırlığı 309 ton, aerodinamik dümenler boyunca açıklık 10.412 m idi.
SAS, uzay aracının yörüngeye fırlatılması sırasında mürettebatı kurtarmayı amaçlıyordu. Uçuşun ilk aşamasında, fırlatma anından SAS ve GO kontrolünün sıfırlanmasına kadar, acil durum roketinden çekilmek için ayrılabilir bir kafa ünitesi (OGB) sağlanır. SAS kontrolünden ve geminin geri çekilen kısmının (BO ve SA) içinde bulunduğu baş kaportanın üst kısmından oluşur. OGB ayrıldığında açılan kaporta üzerine dört kafes stabilizatörü monte edilmiştir. Fırlatma aracı Fırlatma Kompleksi'ndeyken ACS'nin fırlatılması, fırlatma kontrol noktasından komutla ve uçuş sırasında - otomatik olarak gerçekleştirilir. Birinci bölümde ACS şu şekilde çalışır: Bir komut verildiğinde ACS enstrümantasyon bölmesinden ve dinamik kaportanın üst kısmından ayrılır, kafes stabilizatör konsollarının kilitleri açılır, bu da aracın aerodinamik stabilizasyonunu sağlar. uçuş, ardından ACS kontrolünün ana motoru etkinleştirilir, bu da OGB'yi güvenli bir mesafeye (yaklaşık 1 km) götürür. Orada SA, OGB'den ayrılır ve paraşüt sistemi devreye girer.
DU CAC, üç roket motorları katı yakıtlı (SSRM): ana motor, SAS uzaktan kumandasını ön kaportadan düzenli olarak ayırma sırasında fırlatma aracından saptıran tahliye motoru ve SAS uzaktan kumandasını gövdeden uzağa yönlendirmek için tasarlanmış eğim motoru. fırlatma aracı uçuş yönü.
Soyuz uzay aracının uçuş testleri 28 Kasım 1966'da başladı. Program 1971'in sonunda tamamlandı. Bu süre zarfında 19 fırlatma yapıldı (biri başarısız oldu). Geleneğe göre, geminin adı da fırlatma aracına geçti.
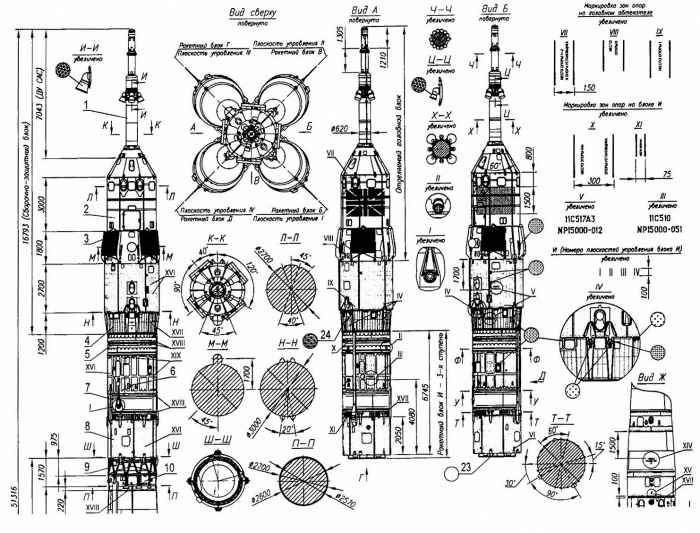
1 - acil kurtarma sisteminin tahrik sistemi; 2 kafalı kaporta; 3 - kafes sabitleyici; 4 - adaptör; 5 - yakıt bloğu deposu Ve; 6.24 - antenler; 7 - blok oksitleyici tank I; 8 - I bloğunun kuyruk bölümünü bırakın; 9 - kafes adaptörü; 10 - alet bölmesi bloğu L; 11 - blok oksitleyici tank L; 12 - braket; 13 - güç konisi; 14 - yan blok oksitleyici tankı; 15 - yakıt deposu ünitesi A; 16 - yan bloğun yakıt deposu; 17 - bağlantı çubukları; 18 - L bloğunun kuyruk kısmı; Yan bloğun 19 kuyruk bölmesi; 20 - aerodinamik direksiyon simidi; 21 - RD-108 motor; 22 - RD-107 motor; 23 - motor RD-0110; XVI - perçin dikişi (havşa başlı perçinler); XVII - perçin dikişi (yarım küre başlı perçinler); XVIII - nokta kaynak dikişi; XIX - kaynaklı dikiş
1969'un ikinci yarısında, uzun vadeli bir yörünge istasyonu DOS-7K'nın (daha sonra Salyut olarak adlandırıldı) yaratılması konusundaki çalışmaların geliştirilmesiyle bağlantılı olarak, 7K-T adını alan Soyuz nakliye uzay aracının geliştirilmesi başladı. . Fırlatma ağırlığı 6,7 tona çıkarıldı, geminin bu versiyonunun insansız lansmanları yapılmadı. Uçuş tasarım testlerinin aşaması, geminin Salyut DOS'un bir parçası olarak çalışmaya başlamasıyla birleştirildi. İlk uçuş 23-25 Nisan 1971'de (Soyuz-10 uzay aracı), ikinci uçuş aynı yılın 6-30 Temmuz'unda gerçekleşti (Soyuz-11 uzay aracı, mürettebat: kozmonotlar Georgy Dobrovolsky, Vladislav Volkov ve Viktor Patsaev). ). İniş sırasında, bölmelerin ayrılması anında, geminin basıncının düşmesine neden oldu ve bu da mürettebatın ölümüne yol açtı. Felaket, geminin tasarımında, öncelikle astronotları kurtarmak için (yaşam destek sistemli uçuş kıyafetleri) olmak üzere bir dizi değişiklik gerektirdi. Bu, mürettebatı ikiye indirdi ve arttı başlangıç ağırlığı 6.8 tona kadar gemi.
70'lerin başından bu yana, üç kişilik bir mürettebata geri dönmeye izin vermesi beklenen Soyuz uzay aracının bir sonraki modifikasyonu üzerinde çalışmalar başladı. Onun için 7K-ST adını ve daha sonra - "Soyuz T" adını aldı. Geminin fırlatma ağırlığı 6.83 tona yükseldi Bu, baş tasarımcı D.I. şu anda operasyonda olan birleşik bir taşıyıcı "Soyuz U" (endeks 11A511U ). Yeni bir taşıyıcının oluşturulması, roket bloklarının menzilini önemli ölçüde azaltmayı mümkün kıldı.
1972'de, uluslararası uzay programı "Soyuz-Apollo"nun (ASTP Programı) uygulanması için çalışmalar başladı. Bunun için 7K-M adını alan uzay aracı "Soyuz" un bir modifikasyonu geliştirildi. Yörüngeye fırlatılması için Soyuz U fırlatma aracının yeni bir SAS kontrol sistemi ile kullanılmasına karar verildi. Mürettebatın SAS kontrol sisteminin sıfırlanması anından GO'nun sıfırlanmasına kadar kurtarılması, kaporta altına dört adet katı yakıtlı roket motorunun takılmasıyla sağlandı. 7K-M uzay aracının yeni bir taşıyıcı ile testleri, 3 Nisan 1974'te otomatik modda bir uçuşla başladı ve aynı yıl 2 ila 8 Aralık arasında bir Soyuz-16 uçuşuyla sona erdi. Ve 15 Temmuz 1975'te, 17 Temmuz'da Amerikan Apollo ile başarılı bir şekilde kenetlenen Soyue-19 fırlatıldı.
6 Ağustos 1974'te başlayan KK 7K-ST'nin uçuş tasarım testleri, 27 Kasım - 10 Aralık 1989 tarihleri arasında Soyuz T-3 uzay aracının insanlı uçuşuyla tamamlandı. Mart 1981'den Temmuz 1986'ya kadar Salyut-6, Salyut-7 ve Mir. Bu dönemde 13 insanlı fırlatma yapıldı. Eylül 1983'te Soyuz T'nin fırlatılması sırasında, fırlatma aracı 11A511U fırlatma kompleksine düştü ve SAS mürettebatın kurtarılmasını sağladı.
Soyuz T uzay aracının daha fazla modernizasyonu, fırlatma kütlesi 7.07 tona ulaşan 7K-STM'nin (Soyuz TM) başka bir modifikasyonunun yaratılmasına yol açtı.Bu, yörünge istasyonlarının iyileştirilmesinden ve özellikle gerçeğinden kaynaklanmaktadır. yörünge eğimini 65 dereceye çıkardıklarını. Fırlatma aracı tarafından taşınan 330-350 kg kargo kaybını telafi etmek gerekli hale geldi. Sorun ancak birleşik bir şekilde çözülebilirdi: ilk olarak, fırlatma aracının yeteneklerini artırarak ve ikinci olarak, geminin kütlesini azaltarak.
1984 yılında Soyuz U fırlatma aracının iyileştirilmesi için çalışmalar tamamlandı. Yükseltilmiş rokete "Soyuz U-2" adı verildi (endeks 11A511U-2). Ana farkı, merkezi ünitede kerosen yerine sentetik hidrokarbon yakıt "siklin" kullanılmasıydı. Uygulaması, daha eksiksiz bir yakıt yanması elde etmeyi ve merkezi ünite motorunun özgül darbesini 2-3 s artırmayı mümkün kıldı. Bu, kontrol ekipmanının modernizasyonu ve ağırlığının azaltılmasıyla ilgili diğer bazı iyileştirmelerle birlikte, faydalı yükün kütlesini gerekli değere yükseltmeyi mümkün kıldı.
Yan bloklarda artan termal etki, üzerlerindeki termal korumanın boyutunun arttırılmasını gerekli kılmıştır. Soyuz TM gemileri için, çapı azaltılmış, SAS OGB'nin aerodinamik özelliklerini iyileştiren ve dengeleme yükünün ağırlığını azaltan yeni bir SAS kontrol ünitesi oluşturuldu. Kafa kaplamasının üst kısmının dış yüzeyi, SAS kontrol sisteminin nozullarından akan bir jet akımının etkilerinden korumak için ısı yalıtımı ile kaplanmıştır. SAS kontrolünün serbest bırakma süresini uçuşun 160. saniyesinden 115. saniyesine değiştirmek önemlidir, bu da yükü artırmayı ve düşüş alanlarını yan bloklarla birleştirmeyi mümkün kılmıştır. Soyuz TM uzay aracının insansız modda uçuş testleri 21 Mayıs 1986'da ve insanlı uçuşlar 17 Şubat 1987'de başladı.
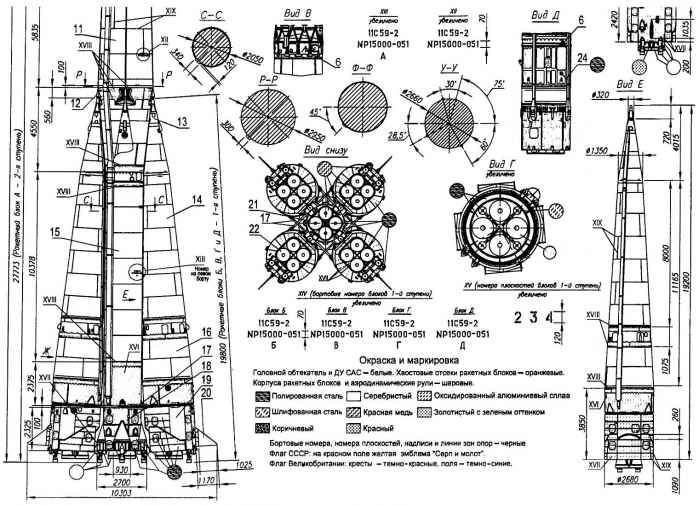
Soyuz U-2 fırlatma aracı, 2. aşamanın A bloğu ve 1. aşamanın B, C, G ve D bloklarından oluşan bir roket blokları 11S59-2 paketinden oluşur; 3. aşama (roket bloğu I 11S510) ve bir uzaktan kumanda SAS, bir kafa kaplaması ve bir geçiş bölmesinden oluşan montaj ve koruyucu blok 11S517AZ. Soyuz TM uzay aracı transfer bölmesine monte edilmiştir. Yukarıdan bir montaj koruyucu blok ile kapatılmıştır. "Soyuz TM" uzay aracı ile taşıyıcının uzunluğu 51.316 m, aerodinamik dümenler boyunca açıklık 10.303 m, fırlatma ağırlığı 310 tondur.
Başlatma sırası aşağıdaki gibidir: kaldırma kontağı - 0 s, SAS uzaktan kumandasının sıfırlanması -115. s, 1. aşama bloklarının ayrılması -118. s, dinamik kaplamanın sıfırlanması - 166. s, merkezi ünitenin ayrılması -297- I s, RB I -305'in kuyruk bölmesini boşaltıyor, KK departmanı - 541.
Şu anda, sentetik yakıt çok pahalı olduğu için Soyuz U-2 fırlatma aracı kullanılmamaktadır ve Soyuz TM uzay aracını 51.5 derecelik bir eğimle yörüngeye yerleştirme görevi Soyuz U fırlatma aracı kullanılarak çözülebilir. 11S59 paketini ve Soyuz U-2'ye benzer üst blokları içerir. Soyuz U fırlatma aracı kompleksinin boyutları - Soyuz TM uzay aracı, Soyuz U-2 fırlatma aracının boyutları ile aynıdır ve fırlatma ağırlığı 309,7 tondur.
Şu anda, Rus programı kapsamında Soyuz fırlatma aracını daha da modernize etmek için çalışmalar devam ediyor. Görevi, Plesetsk kozmodromundan insanlı uçuşlar için fırlatma aracının enerji yeteneklerini arttırmaktır. Program birkaç aşamadan oluşmaktadır. İlk aşamada, eski analog kontrol sisteminin yerleşik bilgisayardan dijital olanla değiştirilmesi planlanmaktadır. Bu, kontrol ekipmanının ağırlığını azaltacak ve güvenilirliğini artıracaktır.
İkinci aşamada, merkezi ve yan füze bloklarının RD-107 ve RD-108 sürdürülebilir roket motorlarının modernize edilmesi planlanıyor. Özellikle, yanma odasında, eski bir tasarımın kafasını 650 santrifüj nozul ile 1000 jet nozullu yenisiyle değiştirin. Bu değiştirme, motorların yanma odalarındaki yakıt bileşenlerinin karıştırılması ve yanma süreçlerini iyileştirecek ve bu da, basınç titreşimlerini azaltacak ve belirli itkiyi birkaç birim artıracaktır. Yükseltilen motorların adı RD-107A ve RD-108A, fırlatma aracı modifikasyonları ise Soyuz FG.
Üçüncü aşama, geometrik boyutlarını korurken geliştirilmiş bir roket bloğunun oluşturulmasını içerir. Değişikliğin temeli, yeni LRE RD-0124 "kapalı" devre olacaktır. Yakıt ve oksitleyici oranını değiştirerek elde edilen kullanımı ve geliştirilmiş yanma süreci, RD-0110 motorunun temel versiyonuna kıyasla özgül darbeyi 33 s artıracaktır. Bileşenlerin oranının değiştirilmesi, tabanı merceksi hale gelecek olan yakıt deposunun hacminde bir azalmaya yol açacaktır. Planlanan tüm modifikasyonlara sahip fırlatma aracına Soyuz-2 adı verildi. Plesetsk kozmodromundan insanlı uzay aracının fırlatılmasına izin verecek. Uçuş testleri yakın gelecekte başlamalıdır.
Rus programının dördüncü aşaması, Soyuz fırlatma aracının derin bir modifikasyonunu içeriyor. Bu, projesinin adı zaten Aurora olan, daha da yüksek enerji yeteneklerine sahip, pratik olarak yeni bir fırlatma aracının yaratılması olacak. Tasarım Bürosunda 30 yıl önce N-1 ay fırlatma aracı için baş tasarımcı N.D. Kullanımı, yakıtın aşamalı olarak yeniden dağıtılmasını gerektirecektir. Merkezi ünitenin yakıt tanklarının çapları, uzunlukları korunarak 0,61 m arttırılmalıdır. Yan bloklar değişmeden kalacaktır. Bu, minimum değişikliklerle "yedi" ye dayalı mevcut fırlatma kompleksinin tasarımının kullanılmasına izin verecektir. Çapı 3.5 m'ye çıkacak olan 3. etapta yeni bir yapı oluşturmak gerekiyor.
Yeni taşıyıcının üç aşamalı versiyonu, Baykonur Uzay Üssü'nden fırlatıldığında 10,6 tonluk bir yükü düşük yörüngelere fırlatabilecek ve dört aşamalı versiyonda, Corvette üst aşaması ile, 1,6 tonluk bir yükü fırlatabilecek. jeodurağan yörünge Rusya ve Fransa, Kourou kozmodromunda (Fransız Guyanası) G7'ye dayalı taşıyıcı roketler için bir fırlatma kompleksinin inşası konusunda hükümetler arası bir anlaşma imzaladı. Hint Okyanusu'nda bulunan Christmas Adası'na bir uzay limanı inşa etme projesi de var. Projelerden herhangi birinin hayata geçirilmesi halinde, yeni fırlatma aracı, 12 ton ağırlığındaki bir kargoyu alçak yörüngelere, 2,1 tonluk bir yükü sabit yörüngelere fırlatabilecek.
V. MINAKOV, mühendis
Modernize sistemlere sahip yeni Soyuz TMA-M serisinin insanlı ulaşım uzay aracı, Federal Uzay Ajansı'nın emriyle Soyuz TMA uzay aracı temelinde S.P. Korolev'in adını taşıyan RSC Energia tarafından geliştirildi.
Modernize edilmiş bir geminin yaratılması ile ilgili çalışmalar 2005'ten beri yürütülmektedir. Yeni bir seri gemi geliştirmenin amacı, uygulanmasının sağlanmasıdır. modern gereksinimler insanlı uzay aracının güvenilirliğine ve mürettebat güvenliğine.
Sistemlerin modernizasyonu için ön koşullar, ekipman ve üretim teknolojisinin eskimesi ve ayrıca bir dizi bileşenin üretiminin durdurulmasıydı.
İzin verilen modernizasyon:
- geminin performansını artırmak;
- anahtar hizmet sistemlerinin garantili tedarikini sağlama sorununu çözmek;
- ağırlığı ve hacmi azaltın.
Ana yükseltilmiş sistemler, trafik kontrol ve navigasyon sistemi (VMS) ve yerleşik ölçüm sistemi (SBI) idi.
Yerleşik sistemlerin modernizasyonu sonucunda, VMS ve SBI'nin yerleşik ekipmanı, gelişmiş yazılımlara sahip modern yerleşik bilgi işlem araçlarına dayalı cihazlarla değiştirildi: toplamda 36 eski cihaz 19 yeni cihazla değiştirildi. tasarım cihazları.
Tanıtılan yeni geliştirilen cihazların kontrolünü, güç kaynağını ve sıcaklık kontrolünü sağlamak için, yerleşik kompleksin (SUBC) kontrol sistemlerinde ve termal rejimin (COTR) sağlanması için eşzamanlı iyileştirmeler yapıldı. Ek olarak, geminin tasarımında (imalatının üretilebilirliğini iyileştirmeyi amaçlayan) ek iyileştirmeler ve geminin ISS ile arayüzlerinde iyileştirmeler yapıldı.
Tüm modifikasyonların bir sonucu olarak, geminin kütlesi yaklaşık 70 kg azalır, bu da geminin güvenilirliğini artırmak için daha fazla modifikasyona izin verecektir (örneğin, bir güç kaynağı sisteminin enerji yoğunluğunun bir ek güç kaynağı ünitesi, geminin konfor bölmesine ek meteoroid koruması yerleştirme vb.).
Soyuz TMA-M'nin yaratıldığı temelinde Soyuz TMA, bu geminin gerçekleştirilen tüm lansmanlarının kanıtladığı gibi, mürettebat için yüksek güvenilirlik ve uçuş güvenliği ile ayırt edilen Soyuz TM uzay aracının bir modifikasyonudur. 1986'dan 2002'ye kadar yörünge istasyonlarına hizmet vermek için.
"Soyuz TMA-M", Rusya ve Amerika Birleşik Devletleri arasındaki eyaletler arası anlaşmalara uygun olarak oluşturuldu ve ayrılmaz parça yörünge istasyonu kompleksi.
ISS'de acil durumlar olması durumunda, Soyuz TMA-M uzay aracı, mürettebatını kurtarmanın yanı sıra, Rus ziyaret seferlerinin ekiplerini istasyona teslim etmenin bir aracıdır.
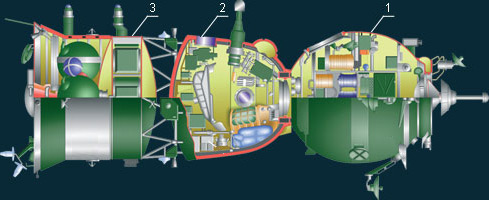
Gemi üç bölmeden oluşur:
- ev (yörünge),
- iniş aracı (SA),
- alet-agrega bölmesi.
Uçuş sırasında gemi aşağıdaki görevleri yerine getirir:
- üç kişiye kadar mürettebatın ve yüklerin istasyona teslimi (bilimsel araştırma ekipmanı, astronotların kişisel eşyaları, istasyon için onarım ekipmanı vb.);
- istasyonda tehlikeli bir durum, kozmonotun hastalanması veya yaralanması vb. durumunda ana keşif ekibinin acil bir şekilde Dünya'ya inmesi için hazır olarak insanlı uçuşu sırasında istasyonda geminin sürekli görevi (işlevi kurtarma gemisi);
- mürettebatın Dünya'ya planlanan inişi (teslimat ve iade sırasında gemi mürettebatının bileşimi değişebilir);
- nispeten küçük kütle ve hacimli yüklerin Dünya'ya teslimi (sefer çalışmasının sonuçları, kişisel eşyalar, vb.);
- iniş sırasında atmosferde yanan ev bölmesindeki istasyondan atıkların çıkarılması.
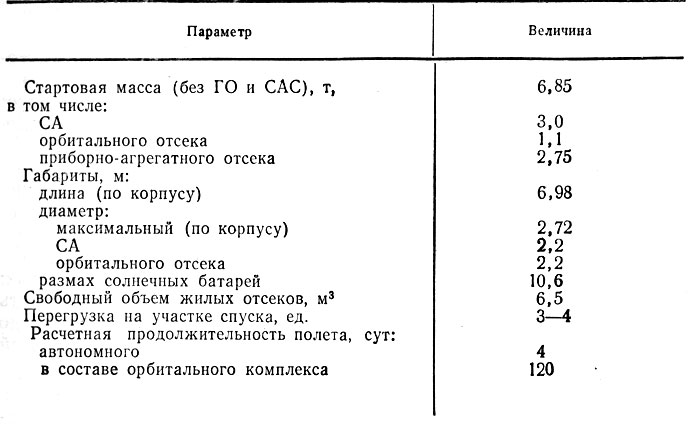
Temel özellikleri
| Karakteristik adı, boyut | Anlam | Not |
| Gemi kütlesi, kg | 7220'ye kadar | |
| İnen aracın kütlesi, kg | ~ 2900 | |
| Mürettebat, kişi. | 2 – 3 | |
| Yörünge parametreleri: | ||
| - eğim, derece. | 51,6 | |
| - fırlatma yüksekliği, km | 202 / 238 | yerberi / zirve |
| - geminin yanaşma yüksekliği, km | 425'e kadar | |
| - geminin inişi sırasındaki yükseklik, km | 460'a kadar | |
| Geminin geometrik özellikleri, mm: | ||
| - vücut uzunluğu | 6980 | |
| - maksimum çap | 2720 | |
| - yaşam bölümlerinin çapı | 2200 | |
| - güneş paneli çeşitleri | 10700 | |
| Tahmini kargo ağırlığı (3 kişilik bir ekiple), kg: | ||
| - teslim edilmiş | 180'e kadar | |
| - iade | 50'ye kadar | |
| - kaldırıldı (atık) | 180'e kadar | |
| Uçuş kaynağı, günler | 200 | 5.2 günlük otonom uçuş kaynağı dahil. |
| DMP aktivasyonundan sonra iniş hızı, m/s: | ||
| - ana paraşüt sisteminde (maks./no.) |
2,6 / 1,4 | 3.6 / 2.6 (KK "Soyuz TM" için) |
| - yedek paraşüt sisteminde (maks. / nom.) |
4,0 / 2,4 | 6.1 / 4.3 (Soyuz TM için) |
| aracı çalıştır | Soyuz-FG | Soyuz TMA uzay aracı için yaratıldı ve 2001-2002 yıllarında Progress uzay aracının fırlatılması sırasında uçuş testlerinden geçti. |
1960 yılında, pratik uzay araştırmalarının başlangıcında, Sergei Pavlovich Korolev liderliğindeki Tasarım Bürosu, yörünge montajı için araçlar oluşturmak için öneriler formüle etti. Özellikle en önemli görevlerden birinin yapay dünya uydularının yörüngelerinde uzay araçlarının buluşması ve montajı olduğu vurgulandı. Sürekli çalışan insanlı uyduların bakımının (mürettebat değişimi, gıda teslimatı, özel ekipman vb.) yörüngede düzenli buluşma ve yerleştirme ile ilişkili olduğu, bu konuda kazanılan deneyimin gerekirse başarılı bir şekilde kurtarmaya izin vereceği kaydedildi. insanlı uyduların ve uzay araçlarının mürettebatı.
"Vostok" ve "Voskhod" gemileri, başta deneysel araştırmalar olmak üzere sınırlı bir dizi bilimsel ve teknik görev gerçekleştirdi. Soyuz serisinin yeni uzay aracı, nispeten uzun uçuşlar, manevralar, buluşma ve Dünya'ya yakın yörüngelerde kenetlenme için tasarlandı.
10 Mart 1962'de Korolev, "Bir Dünya uydusunun yörüngesinde uzay aracı montajı için karmaşık ("Soyuz" teması)" başlıklı teknik bir prospektüsü onayladı. Bu belge, ilk kez, yörüngede yerleştirme ve montaj alıştırması yapmak için bir astronot-"montajcı" ile Vostok-7 uzay aracının modifikasyonunu kullanma olasılığı için bir gerekçe sağlar. Bunu yapmak için, geminin randevu ve yerleştirme sistemlerinin yanı sıra çoklu dahil etme tahrik uzaktan kumandası ve bir demirleme ve yönlendirme mikromotor sistemi ile donatılması gerekiyordu. "Vostok-7" yörüngede montaj için kullanılabilir yapay uydu Toprak uzay Roketi, üç özdeş roket bloğundan oluşur. Böyle bir uzay roketinin yardımıyla, bir ila üç kişilik bir ekiple özel bir L1 uzay aracıyla Ay'ın etrafında uçması önerildi.
Bir süre sonra, Ortak Girişim tarafından onaylanan "Dünya Uydu Yörüngesinde Uzay Aracı Montajı" başlıklı ikinci bir prospektüs ortaya çıktı. Korolev, 10 Mayıs 1963. İçinde "Birlik" teması zaten net ve inandırıcı geliyor. Belgenin ana amacı, sırayla fırlatılan ve yörüngeye yerleştirilen Soyuz ve yakıt ikmali için tanker gemilerinin güçlendirici bloklarından oluşan bir komplekstir.
İzahnamede iki ana görev belirlendi: yörüngeye yerleştirme ve montaj yapmak ve insanlı bir araçla Ay'ın etrafında uçmak. Korolev'e göre, bu iki göreve yönelik çözümleri birbirine bağlamak, SSCB'nin uzay araştırmalarında önceliğini sağladı.
L1 uzay aracı tarafından Ay çevresinde bir doğrudan uçuş varyantının geliştirilmesiyle bağlantılı olarak, Soyuz programı, uzay aracının randevusunu ve kenetlenmesini test etmeyi ve ardından mürettebat üyelerinin gemiden gemiye transferini amaçlıyordu. 1965 yılında imzalanan Soyuz'un ön tasarımı, gemi için yeni taktik ve teknik gereksinimleri zaten yansıtıyordu. Soyuz'un insansız versiyonunda geliştirilmesine 28 Kasım 1966'da Kosmos-133 uydusunun fırlatılmasıyla başlandı. Aralık 1966'da bir fırlatma aracı kazası ve başlangıçta bir acil kurtarma sistemi ile sonuçlanan insansız bir Soyuz fırlatma girişiminden sonra, 7 Şubat 1967'de ikinci insansız Soyuz (Cosmos-140) yörünge uçuşu yaptı. Aral Denizi..
Soyuz-1'deki ilk insanlı uçuş 23-24 Nisan 1967'de kozmonot V.M. Ancak Komarov, iniş sırasında paraşüt sistemlerinin arızalanması nedeniyle uçuş felaketle sonuçlandı.
İlk otomatik yerleştirme 30 Eylül 1967'de insansız uydular Kosmos-186 ve -187 tarafından gerçekleştirildi ve 15 Nisan 1968'de Kosmos-212 ve Kosmos-213 uyduları tarafından tekrarlandı. 28 Ağustos 1968'de başlatılan Soyuz uzay aracının (uydu Kosmos-238) insansız uçuşundan sonra düzenli Soyuz uçuşları başladı.
Aslında, Soyuz programının görevi - insanlı uzay aracının astronotların uzaydan geçişi ile yerleştirilmesi - 16 Ocak 1969'da Soyuz-4 ve -5 uzay aracının kozmonotlar V.A ile uçuşu sırasında tamamlandı. Şatalov, B.V. Volinov, A.Ş. Eliseev ve E.V. Khrunov. Kalan Soyuz uzay aracı, grup uçuşu ve uzun uçuşta teknolojik deneyler yapmak üzere yönlendirildi.
Ekim 1969'da, Soyuz programı kapsamında, gemide yedi kozmonot bulunan Soyuz-6, Soyuz-7 ve Soyuz-8 olmak üzere üç uzay aracından oluşan bir grup uçuşu gerçekleşti. Aynı uzay limanından arka arkaya üç uzay aracını minimum aralıklarla fırlatmak, önemli bir teknik başarıydı. Büyük önem bir grup uçuşunu yönetme konusunda bu deneyde kazanılan deneyime sahipti. Üç uzay aracı, yer tabanlı bir komuta ve ölçüm kompleksi, bir grup araştırma gemisi ve Molniya-1 iletişim uydusundan oluşan tüm sistem sorunsuz çalıştı.
Soyuz-6 - uzayda kaynak yapan benzersiz bir deney gerçekleştirildi. Özel tasarlanmış Vulcan kaynak makinesinde üretilmiştir. Vulcan'ın kaynak ünitesi yörünge bölmesine monte edildi ve uzaktan kumanda uzaktan kumanda kokpitteydi.
Yörünge bölmesinin basıncı düşürüldü ve kaynak üç şekilde gerçekleştirildi: sıkıştırılmış ark, elektron ışını ve tüketilebilir elektrot. Deney sırasında ince sac paslanmaz çelik ve titanyumun kaynağı, paslanmaz çelik, titanyum ve alüminyumun kesilmesi ve metalik olmayan malzemelerin işlenmesi gerçekleştirilmiştir. Daha sonra yörünge bölmesi tekrar mühürlendi, kozmonotlar kurulumu söktüler, örnekleri iniş aracına aktardılar ve ardından onları Dünya'ya teslim ettiler. Başarılı deney, uzayda inşaat ve montaj çalışmaları için umutlar açtı.
1 Haziran 1970'de yeni bir Soyuz piyasaya sürüldü - dokuzuncu. Bu uçuş, astronotiğin daha da geliştirilmesi için paha biçilmez malzeme sağladı. Uzun vadeli uzay uçuş faktörlerinin insan vücudu üzerindeki etkisinin biyomedikal çalışmaları özellikle değerliydi.
Gemi komutanı A.G. İkinci uzay uçuşunu yapan Nikolaev ve uçuş mühendisi V. I. Sevastyanov daha sonra bir uzay uçuşu süresi için dünya rekoru kırdı. Dünya yörüngesinde 424 saat çalıştılar. Uçuş programı, uzayda otonom navigasyon üzerine birçok deneyle doluydu. bilimsel araştırma Dünyaya yakın uzay.
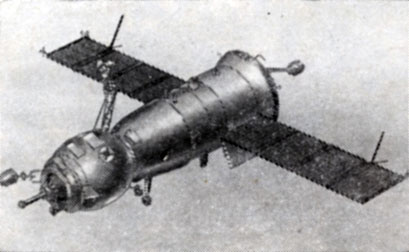
Soyuz uzay aracı etkileyici boyutlara sahiptir. Uzunluğu yaklaşık 8 metre, en büyük çapı yaklaşık 3 metre, başlamadan önceki ağırlığı neredeyse 7 ton. Geminin tüm bölmeleri, yapıyı ve ekipmanı güneşte aşırı ısınmadan ve gölgede çok fazla soğumadan koruyan özel bir ısı yalıtımlı "battaniye" ile dıştan kaplanmıştır.
Gemide yörünge, enstrümantasyon ve iniş aracı olmak üzere üç bölme vardır. Yörünge bölmesi, silindirik bir ek ile birbirine bağlanan iki yarım küre şeklindedir. Geminin radyo sistemlerinin, televizyon kameralarının ve diğer ekipmanların büyük ve küçük antenleri, yörünge bölmesinin dış yüzeyine kurulur.
Yörünge bölmesinde, astronotlar yörünge uçuşları sırasında çalışır ve dinlenirler. Bilimsel ekipman, mürettebat yatakları ve çeşitli ev aletleri barındırır. Bölmenin üst yarım küresinde, yerleştirme ünitesinin monte edildiği bir çerçeve ve Soyuz'un yanaştığı gemiye geçiş için bir kapak vardır.
Yuvarlak bir kapak yörünge bölmesini iniş modülüne bağlar. L. A. Gilberg kitabında “İniş aracı segmental-konik bir şekle sahip, bir farı andırıyor” diye yazıyor. - Ağırlık merkezinin belirli bir konumu olan bu şekil, cihaza aerodinamik bir kalite verir; atmosferde uçarken aerodinamik bir kaldırma kuvveti cihazı uzunlamasına eksen etrafında döndürerek düzenlenir. Bu, kontrollü bir inişe izin verir - aşırı yükleri 3-4 birime düşürür ve iniş doğruluğunu önemli ölçüde artırır.
İniş yapan aracın dış yüzeyine dayanıklı bir ısı koruma kaplaması uygulanır; iniş sırasında havayı kesen ve aerodinamik ısınmaya en duyarlı olan aparatın alt kısmı, inmeden önce astronotların kabinini aydınlatmak için paraşüt açıldıktan sonra atılan özel bir ısı kalkanı ile kaplanmıştır. Aynı zamanda, Dünya ile temastan hemen önce açılan ve iniş sırasında şoku yumuşatan, bir ekranla kaplanmış yumuşak bir inişin toz motorları açılır.
İniş aracında, yörünge bölmesine giden bir kapak olan ısıya dayanıklı camlı iki lomboz bulunur. Dışarıda, astronotların gezinmesini kolaylaştıran ve demirleme ve yanaşma sırasında başka bir gemiyi gözlemlemelerini sağlayan optik bir görüş var. İniş aracının çevresi boyunca alt kısımda, aracın Dünya'ya dönüşü sırasında kullanılan iniş kontrol sistemine ait altı adet motor bulunmaktadır. Bu iticiler, iniş aracını aerodinamik özelliklerinden yararlanacak konumda tutmaya yardımcı olur.
İniş aracının üst kısmında ana ve yedek paraşütlerin bulunduğu bölmeler bulunmaktadır.
Alet-agrega bölmesi, iniş aracına sabitlenmiş küçük bir konik "etek" ile silindir şeklindedir ve gemideki ekipmanların ve tahrik sistemlerinin çoğunu barındıracak şekilde tasarlanmıştır.
Yapısal olarak, bölme üç bölüme ayrılmıştır: geçiş, enstrümantal ve agrega. Alet bölümü sızdırmaz bir silindirdir. Radyo iletişim ve radyo telemetri ekipmanı, yönlendirme ve hareket kontrol sistemi cihazları, bazı termal kontrol ve güç kaynağı sistemleri içerir. Diğer iki bölüm mühürlü değildir.
Uzay aracının ana tahrik sistemi, yörüngede manevra yapmak ve iniş sırasında fren yapmak için kullanılan alet montaj bölmesinde bulunur.
İki güçlü sıvı yakıtlı roket motorundan oluşur. Bunlardan biri ana, diğeri yedek. Bu motorların yardımıyla gemi başka bir yörüngeye geçebilir, yörünge istasyonuna yaklaşabilir veya uzaklaşabilir, bir alçalma yörüngesine geçmek için hareketi yavaşlatabilir. Yörüngede fren yapıldıktan sonra geminin kompartımanları birbirinden ayrılır. Yörünge ve alet-toplu bölmeler atmosferde yanar ve iniş aracı belirli bir iniş alanına iner. Dünyaya 9-10 kilometre kaldığında paraşüt sistemi devreye giriyor. İlk önce, fren paraşütü açılır ve ardından ana paraşüt açılır. Üzerinde cihaz yumuşak bir iniş yapar. İnişten hemen önce, bir metre yükseklikte, yumuşak iniş motorları çalıştırılır.
İtici sistemi, 14 yerleştirme ve konum iticisinden ve 8 hassas konum iticisinden oluşur. Alet-agrega bölmesinde ayrıca termal kontrol sisteminin hidrolik üniteleri, yakıt depoları, yürütme organlarının basınçlandırma sisteminin bilyalı silindirleri, güç kaynağı sisteminin akümülatörleri bulunmaktadır. Güneş panelleri de bir elektrik kaynağıdır. Kullanışlı alanı yaklaşık 9 metrekare olan bu pillerin iki paneli, alet-agrega bölmesinin dışına sabitlenmiştir. Pillerin kenarlarında - kırmızı, yeşil ve yan ışıklar Beyaz çiçekler, gemileri demirlerken ve yanaştırırken gezinmeye yardımcı olur.
Dışarıda, gemiden fazla ısıyı uzaya çıkarmanıza izin veren bir termal kontrol sisteminin kanatlı bir radyatör yayıcısı da kuruludur. Alet-agrega bölmesinde birçok anten var - geminin kısa ve ultra kısa dalgalarda Dünya ile radyotelefon iletişimi, bir radyo telemetri sistemi, yörünge ölçümleri ve yönlendirme ve hareket kontrol sisteminin sensörleri.
Soyuz uzay aracını ve Salyut istasyonlarını kullanma deneyimi, yalnızca istasyonların süresini artırmak, programları ve araştırma alanlarını genişletmek için değil, aynı zamanda nakliye gemisinin yeteneklerini artırmak için yörünge komplekslerini iyileştirmenin gerekli olduğunu göstermiştir. Mürettebat güvenliğini ve operasyonel özellikleri iyileştirin.
Bu sorunları çözmek için Soyuz temelinde yeni bir gemi olan Soyuz T oluşturuldu. Özgün tasarım çözümleri, mürettebat boyutunu üç kişiye çıkarmayı mümkün kıldı. Gemi, bilgisayar sistemi, birleşik sevk sistemi, Solar paneller, otonom uçuş için bir yaşam destek sistemi.
Tasarımcılar, yüksek güvenilirlik ve uçuş güvenliğine özel önem verdiler. Gemi, yörüngedeki iniş aracının basınçsızlaştırılması gibi zor hesaplanmış bir beklenmedik durumda bile, iniş bölümü de dahil olmak üzere otomatik ve manuel modlarda kontrol etmeyi mümkün kıldı. İstasyonun bir parçası olarak Soyuz T uçuşunun süresi 180 güne çıkarıldı.
Tüm bu yeni teknik çözümler, kozmonot V. Dzhanibekov ve V. Savinykh'in serbest sürüklenme halindeki Salyut-7'ye uçuşu sırasında kendilerini tamamen haklı çıkardı. Limana yanaştıktan sonra, gemi, kaynaklarıyla birlikte, mürettebatın istasyonda onarıcı onarımlar gerçekleştirmesini sağladı. Daha az çarpıcı olmayan bir başka örnek, kozmonot L. Kizim ve V. Solovyov'un Mir istasyonundan Salyut-7'ye ve 400 kilograma kadar bir yükle geri dönüşüdür.
Kalıcı bir yörünge kompleksi oluşturmak için uzay programının daha da geliştirilmesi, Soyuz T uzay aracının iyileştirilmesini gerektirdi. Geliştiriciler, geminin Mir istasyonu ile uyumluluğunu sağlama, enerji yeteneklerini artırma ve yerleşik sistemleri iyileştirme göreviyle karşı karşıya kaldı.
I. Minyuk'un Aviation and Cosmonautics dergisinde yazdığı gibi: “Uzay araçlarının enerjisini artırma ihtiyacı, Soyuz T uzay aracının üç kişilik bir mürettebatın yalnızca yaklaşık yüksekliği olan bir yörüngeye teslim edilmesini sağlamasından kaynaklanmaktadır. 300 kilometre. Ancak istasyonun sabit yörüngesi 350 kilometrenin üzerindedir.
Çıkış yolu, geminin "kuru" ağırlığının azaltılması, paraşüt sistemleri için daha hafif, yüksek mukavemetli malzemelerin kullanılması ve acil kurtarma sistemi için yeni bir sevk sisteminin kullanılmasıyla bulundu. Bu, Mir istasyonu ile üç koltuklu Soyuz TM uzay aracının kenetlenme yüksekliğini 350-400 kilometreye çıkarmayı ve teslim edilen kargonun kütlesini artırmayı mümkün kıldı.
Aynı zamanda, mürettebatın Dünya ile iletişim kurması için radyo iletişimi, açısal hız ölçerler, yakıt kaynaklarının bölümlenmiş depolamalı bir tahrik sistemi ve ayrıca astronotlar için ısıdan koruyucu giysiler de dahil olmak üzere yerleşik sistemleri geliştiriliyordu. Soyuz TM'nin yörünge kompleksinin bir parçası olarak istasyonun bazı işlevlerini rezerve edebileceğine dikkat edilmelidir. Böylece, güç sağlamak için gerekli oryantasyonu ve yörünge yükselişini gerçekleştirebilir ve termal kontrol sistemi, yörünge kompleksinde üretilen fazla ısıyı boşaltabilir.
Soyuz temelinde, bir tane daha yaratıldı uzay aracı Uzun süreli yörünge istasyonlarının çalışmasını sağlayan İlerleme'dir. İsimlendirildi
tek kullanımlık otomatik kargo taşıma uzay aracı. Yakıt ikmali ve yükleme sonrası ağırlığı 7 tondan biraz fazladır.
Progress otomatik kargo uzay aracı, istasyonun tahrik sistemine yakıt ikmali yapmak için Salyut yörünge istasyonlarına çeşitli kargolar ve yakıt sağlamak üzere tasarlanmıştır.
Birçok yönden Soyuz'a benzemesine rağmen, tasarımında önemli farklılıklar var. Bu gemi ayrıca üç bölmeden oluşur, ancak amaçları ve. dolayısıyla tasarımı farklıdır. Kargo gemisi Dünya'ya dönmemelidir. Doğal olarak, bir iniş aracı içermez. İşlevini yerine getirdikten sonra yörünge istasyonundan ayrılır, kendisini buna göre yönlendirir, fren motoru açılır, cihaz Pasifik Okyanusu'nun hesaplanan alanı üzerinde atmosferin yoğun katmanlarına girer ve varlığını sona erdirir.
İniş yapan bir araç yerine, yakıt - yakıt ve oksitleyici taşımak için bir bölme var ve İlerleyen yörünge bölmesi bir kargo bölmesine dönüştü. İçinde yiyecek ve su kaynakları, bilimsel ekipman, yörünge istasyonunun çeşitli sistemlerinin değiştirilebilir blokları yörüngeye teslim edilir. Bütün bu kargo iki tondan fazla ağırlığındadır.
Progress'in alet-toplu bölmesi, Soyuz uzay aracının benzer bölmesine benzer. Ama aynı zamanda bazı farklılıkları var. Sonuçta, İlerleme otomatik bir gemidir ve bu nedenle buradaki tüm sistemler ve birimler yalnızca bağımsız olarak veya Dünya'dan gelen komutlarla çalışır.
İnsanlı kargo gemileri sürekli olarak geliştirilmektedir. 1987'den beri, astronotlar yörünge istasyonlarına teslim edildi ve değiştirilmiş bir Soyuz TM uzay aracıyla Dünya'ya geri döndü. Modifiye ve kargo "İlerleme".
TASS-DOSYER. 28 Temmuz 2017'de Moskova saatiyle 18:41'de, Soyuz MS-05 insanlı uzay aracına sahip Soyuz-FG fırlatma aracının Baykonur Uzay Üssü'nden fırlatılması planlanıyor.
Expedition ISS-52/53, Uluslararası Uzay İstasyonuna (ISS) gidecek. Ana ekipte Rus kozmonot Sergei Ryazansky, Amerikalı astronot Randolph Breznik ve Avrupa Uzay Ajansı (ESA) astronotu, İtalyan temsilci Paolo Nespoli yer alıyor.
Gemi
Soyuz MS ("MS", "modernize edilmiş sistemler" anlamına gelir) bir Rus insanlı uzay aracıdır. Soyuz uzay aracı ailesinin bir parçasıdır (ilk olarak 1966'da fırlatıldı, ilk olarak 1967'de insanlı).
Mürettebatları ISS'ye teslim etmek için tasarlandı (2011'e kadar bu işlev aynı zamanda Amerikan yeniden kullanılabilir gemiler Uzay Mekiği gibi) ve Dünya'ya dönüş. Mürettebatın zorunlu veya acil tahliyesi durumlarında (istasyonda tehlikeli bir durum, astronotların hastalanması veya yaralanması durumunda) kurtarma gemisi rolünü yerine getirir. Ek olarak, istasyona teslim etmek ve küçük kargoları (bilimsel araştırma ekipmanı, astronotların kişisel eşyaları, deney sonuçları vb.)
Baş geliştirici ve üretici Energia Rocket and Space Corporation'dır. S. P. Koroleva (RSC Energia, Korolev şehri, Moskova bölgesi). Federal Uzay Ajansı'nın (şimdi devlet şirketi Roscosmos) talimatları üzerine geliştirilen geminin taslak tasarımı, Ağustos 2011'de RSC Energia'nın bilimsel ve teknik konseyinin toplantısında onaylandı. Soyuz MS, önceki değişiklik gibi ( Soyuz TMA-M"), derin bir modernizasyon yoluyla Soyuz TMA serisi (2002-2011'de işletilmiştir) temelinde oluşturulmuştur.
özellikleri
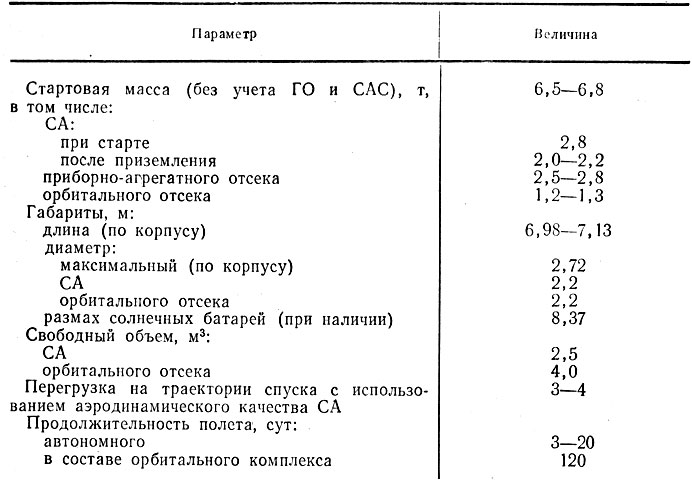
Soyuz MS'nin dış konfigürasyonu, önceki iki serinin gemilerine tamamen karşılık gelir. Alet-agrega, ev ve iniş aracı olmak üzere üç bölmeden oluşur. Uzunluk - 6,98 m, maksimum çap - 2,72 m, yaşam bölümlerinin çapı - 2,2 m.
Fırlatma aracı kütlesi 7,22 ton, iniş aracı kütlesi yaklaşık 2,9 ton, yük ağırlığı 100 kg'a kadar (üç kişilik bir ekiple). Soyuz MS, üç kişiye kadar mürettebat için tasarlanmıştır (astronot boyu 150-190 cm ve ağırlığı 50-95 kg). Uçuş kaynağı - 200 gün.
ISS ile yerleştirme hem otomatik hem de manuel kontrol modunda (uzay aracı komutanı tarafından) gerçekleştirilebilir.
modernizasyon
Soyuz MS'de hemen hemen tüm dahili sistemler güncellendi.
- Tüm uçuş aşaması boyunca astronotlarla iletişim sağlayan hareket ve navigasyon kontrol sistemi geliştirildi. Bu sayede iniş yapan aracın tespiti daha az zaman alır.
- Kvant-V yerleşik telsiz komut sistemi, birleşik bir EKTS-TKA komut ve telemetri sistemi ile değiştirildi (ilk olarak Aralık 2015'te başlatılan Progress MS-01 kargo gemisine kuruldu). Yeni komut radyo bağlantısı, Luch-5 röle uyduları aracılığıyla sinyallerin alınmasını sağlar (Aralık 2015'te üç uydudan oluşan Luch sistemi devreye alındı). Bu, yalnızca yer iletişim istasyonlarının bulunduğu Rusya bölgesi üzerinde değil, yörüngedeki hemen hemen her yerde uzay aracıyla iletişimi sürdürmenizi sağlar.
- Yörünge radyo izleme ekipmanı yerine, geminin hareketinin parametrelerini GLONASS ve GPS navigasyon sistemlerinin uydularından gelen sinyallerden belirlemenizi sağlayan ve böylece koordinatları doğru bir şekilde belirleme görevini basitleştiren otonom bir uydu navigasyon sistemi (ASN) kullanılır. ve yörüngedeki geminin hızı (ilave yer tesisleri dahil edilmeden). ASN, geminin yörüngesinin parametrelerini 5 m'ye kadar bir doğrulukla, gemi istasyona yaklaştığında koordinatları - bir metreye kadar (gelecekte - 3-4 cm'ye kadar) belirlemeyi mümkün kılar.
- İstasyon ile yanaşma ve buluşma sistemi yükseltildi. Hassas Aletler Bilimsel Araştırma Enstitüsü (Moskova) kendi "Kurs-A" sistemini "Kurs-NA" (NA - "yeni aktif") ile değiştirdi. Kurs-NA sistemi kullanır modern yöntemler dijital sinyal işleme. Ayrıca, önceki nesil ekipmanlara göre iki kat daha hafif ve üç kat daha fazla enerji verimlidir. Güvenilirlik için, yerleştirme mekanizmasına yedek elektrik motorları eklendi.
- Klest analog televizyon sistemi yerine, Soyuz MS bir dijital televizyon sistemi kullanır (gemi ile istasyon arasındaki iletişimi bir havadan radyo bağlantısı yoluyla sağlar).
- Uzay aracının iniş aracında, daha önce kullanılan bilgi depolama sistemi (ISS), yeniden kullanılabilir bir "kara kutu" ile değiştirildi. Yükseltilmiş SZI-M sistemi, Ölçüm Ekipmanları Araştırma ve Üretim Derneği (Korolev, Moskova Bölgesi; Rus Uzay Sistemleri şirketinin yapısının bir parçası) tarafından geliştirilmiştir. Bu küçük cihaz pilot koltuğunun altına yerleştirilmiştir, 10 kata kadar uçuşlarda kullanılabilir ve darbeye ve ısıya dayanıklı bir muhafazaya sahiptir: 540 km/s'ye kadar hızlarda ve 700 dereceye kadar sıcaklıklarda zemine çarpmaya dayanabilir. 30 dakika santigrat. Yardımı ile uçuş sırasında teknik bilgiler, astronotların fizyolojik parametreleri ve sesli bilgiler kaydedilir.
- Güneş panellerinin verimliliği, alanı ve fotosellerin gücü artırılarak iyileştirilmiştir. Soyuz MS, uzay enkazına ve mikro meteoritlere karşı ek koruma aldı.
Lansmanlar
Soyuz MS fırlatmaları, Samara'daki İlerleme Roketi ve Uzay Merkezi'nin Soyuz-FG fırlatma aracı kullanılarak Baykonur kozmodromundan (Rusya tarafından Kazakistan'dan kiralanmıştır) gerçekleştirilmektedir. Geminin ilk uçuşlarında, üzerine kurulu yeni sistemleri test etmek için, kısaltılmış altı saatlik bir yerine ISS ile iki günlük 34 yörüngeli bir buluşma şeması kullanıldı (Soyuz tipi insanlı için kullanılmaya başlandı). Mart 2013'ten itibaren uzay aracı), gemi Dünya çevresinde sadece dört yörünge yaptığında.
Soyuz MS ilk kez 7 Temmuz 2016'da Dünya'ya yakın yörüngeye fırlatıldı. İki gün sonra, 9 Temmuz'da uzay aracı ISS-48/49 seferinin üç üyesini istasyona teslim etti. Aynı yılın 30 Ekim'inde ISS'den ayrıldıktan sonra, uzay aracının iniş modülü mürettebatı Dünya'ya geri döndürdü.
İkinci uzay aracının ISS-49/50 mürettebatıyla fırlatılması 19 Ekim 2016'da gerçekleştirildi. Soyuz MS-02, 21 Ekim 2017'den 10 Nisan 2017'ye kadar istasyonun bir parçasıydı.
17 Kasım 2016'da Soyuz MS-03, ISS-50/51 seferi üyeleriyle birlikte uzaya fırlatıldı. Uzay aracı, 20 Kasım'da ISS'ye kenetlendi ve 2 Haziran 2017'ye kadar istasyonun bir parçasıydı.
Soyuz MS-04, 20 Nisan 2017'de fırlatıldı. Aynı gün, uzay aracı ISS'ye yanaştı ve ISS-51/52 seferinin mürettebatını istasyona teslim etti. Şu anda, Soyuz MS-04 istasyonun bir parçasıdır. Toplamda, 27 Temmuz 2017'ye kadar, insanlı bir uzay aracının dört lansmanı gerçekleştirildi - hepsi başarılı oldu.
perspektif
Ardından, Soyuz MS'in teknik çözümlerine dayanarak, RSC Energia, Federasyon olarak adlandırılan yeniden kullanılabilir bir insanlı nakliye aracı yaratmayı planlıyor. Ağustos 2015'te, yeniden giriş aracının gövdesi ilk kez Zhukovsky'deki (Moskova bölgesi) MAKS hava gösterisinde halka gösterildi.
Devlet şirketi Roscosmos'un planlarına göre, Federasyonun insansız bir versiyonda ilk lansmanı 2022'de Baikonur'dan gerçekleşebilir (daha önce 2021 için Vostochny kozmodromundan planlanmıştı).
Uzay gemisi "Vostok"- uzaya insanlı bir uçuşun gerçekleştirildiği dünyanın ilk insanlı yörünge uzay aracı. İki aşamalı Sputnik fırlatma aracı temelinde oluşturulan, daha sonra Vostok fırlatma aracı olarak adlandırılan üç aşamalı modifikasyonu, 4,7 tondan daha ağır bir uydu gemisini jeosantrik bir yörüngeye fırlatmayı mümkün kıldı.
Vostok uzay aracı (Şekil 3.17), bir iniş aracı ve bir fren tahrik sistemine sahip bir alet bölmesinden oluşuyordu. Başlıca teknik özellikleri tabloda verilmiştir. 3.2.
Tablo 3.2. Vostok uzay aracının özellikleri
Uzay aracı (SC) projesi üzerindeki çalışmalar 1958'de başladı.
15 Mayıs 1960'ta, ilk uzay aracı uydusu, 19 Ağustos 1960'ta termal korumasız insansız bir versiyonda fırlatıldı - ikincisi, gemide iki köpekle, güvenli bir şekilde Dünya'ya geri döndü ve ardından üç uzay aracı daha ve son olarak iki (Mart.) gelecekteki insanlı uçuş programı tamamen test edildi.
12 Nisan 1961'de, Moskova saatiyle 9:07'de, Vostok fırlatma aracı, SSCB ile 181 km'lik bir perigee, 327 km'lik bir apoje ve 65 °'lik bir eğim ile yörüngeye fırlatıldı ve SSCB ile 4725 kg kütleye sahip Vostok uzay aracı pilot kozmonot Yu. A. Gagarin. 108 dakika sonra, Dünya çevresinde bir devrimi tamamladıktan sonra, uzay aracı "Vostok" ve pilot kozmonot Yu. A. Gagarin, Sovyetler Birliği topraklarına güvenli bir şekilde indi.
6 Ağustos 1961'de, uzay aracı Vostok-2, SSCB pilot kozmonot G.S. Titov'un ilk kez günlük bir yörünge uçuşu gerçekleştirdiği yörüngeye fırlatıldı.
Ağustos 1962'de, iki uzay aracı "Vostok-3" (pilot-kozmonot A.G. Nikolaev) ve "Vostok-4" (pilot-kozmonot P. R. Popovich) ilk grup uçuşu gerçekleşti.
Haziran 1963'te, iki uzay aracı "Vostok-5" (pilot-kozmonot V.F. Bykovsky) ve "Vostok-6" (pilot-kozmonot V.V. Tereshkova) yeni bir grup uçuşu gerçekleştirildi. Vostok-5 uzay aracının maksimum uçuş süresi 5 gündü. Vostok programı kapsamındaki uçuşların başarıyla tamamlanması, Sovyet uzay teknolojisinin daha da geliştirilmesi için temel oluşturdu.
Vostok uzay aracı aşağıdaki yerleşik sistemlere sahipti:
uçuş programı sırasında uzay aracının otonom ve manuel oryantasyonunu ve stabilizasyonunu sağlayan hareket kontrolü ve stabilizasyonu; bu durumda, manuel yönlendirme için Vzor optik cihazı kullanıldı ve otomatik yönlendirme için otonom sensör kullanıldı. güneş yönelimi; sistemlerin çalışmasını kontrol etmek ve manuel olarak komut vermek için bir astronot konsolu vardı;
alet bölmesine yerleştirilmiş balonlardan gelen sıkıştırılmış nitrojenle çalışan iki bağımsız jet nozul sisteminden (her biri 8 adet) oluşan yönlendirmeli gaz nozulları;
komut mantıksal ve elektrikli anahtarlama cihazları ve pil paketleri (enstrüman bölmesinde) dahil olmak üzere yerleşik ekipman kontrolü ve güç kaynağı, otonom pil(SA'da) ve akım dönüştürücüler;
yaşam desteği ve termal kontrol, 755 - 775 mm Hg basınçla SC kabininde normal bir atmosfer sağlar. Sanat. hacimce %21 - 25 oksijen içeriğine ve 17 - 26°C sıcaklığa sahip ve rejenerasyon ünitesi, soğutma ve kurutma ünitesi, nem emiciler, zararlı yabancı maddeleri emen bir filtre, izleme ve kontrol ekipmanlarının yanı sıra SA'da yedek evaporatif soğutma sistemi olarak; soğutma ve kurutma ünitesinden gelen ısı, üzerine radyatör-radyatör ve panjurların takıldığı alet bölmesinden sağlanan bir soğutucu tarafından çıkarıldı; termal kontrol sistemi, uzay aracının alet bölmesindeki ekipman için belirtilen sıcaklık koşullarını sağladı;
bir VHF radyo bağlantısının parçası olarak radyo iletişimi, iki yönlü telefon iletişimi sağlamak için iki HF radyo bağlantısı, astronotun refahı hakkında veri iletmek için "Sinyal" sisteminin bir HF vericisi, yörünge sağlayan çoğaltılmış bir radyo ekipmanı seti ölçümler, bir TV vericisi ve bir yayın alıcısı, komuta radyo hattı ekipmanının iki set alma ve kod çözme cihazı, karşılık gelen anahtarlama ekipmanı ile iki set radyo telemetri ekipmanı; kozmonot ve SA'nın ana paraşütlerinin tanıtılması sırasında, yön bulma HF vericilerinin çalışması sağlandı ve inişten sonra - VHF vericileri;
yerleşik ekipman çalışmasının belirli bir siklogramını sağlayan bir program zamanı cihazı;
1,6 tf itme gücüne sahip sıvı yakıtlı bir jet motoru, yakıt tankları, bir yakıt besleme sistemi ve bir yedek (280 kg) iki bileşenli yakıt içeren yörüngeden çıkma sırasında yavaşlama için bir tahrik sistemi (kuru ağırlık 396 kg); motor çalışması sırasında uzay aracının stabilizasyonu, tahrik sisteminin direksiyon nozulları kullanılarak jiroskoplardan gelen sinyallere göre otomatik olarak gerçekleştirildi;
iniş aracının paraşütle iniş sisteminin bir parçası olarak inişler, kozmonotun paraşüt sistemleri ve NAZ ünitesi ile fırlatma koltuğu ve sistem çalışmasının otomatik kontrolü;
bir kozmonotun acil kurtarma, fırlatma sırasında veya uçuşun başlangıcında bir fırlatma aracı kazası olması durumunda, kozmonotun iniş aracından fırladığı ve geri kalanında bir kaza olması durumunda dikkate alınarak inşa edilmiştir. uçuş segmentlerinden SA, uzay aracının alet bölmesinden ayrılır ve daha sonra Dünya'ya iniş için araç fırlatır.
SA'nın tüm dış yüzeyi, iniş bölümünde atmosferde uçuş sırasında alüminyum alaşımlı yapıyı ısınmadan koruyan termal koruma (800 kg'a kadar) ile kaplandı. Isıl korumanın dışında, elek-vakum ısı yalıtımı matları uygulandı.
Tüm Vostok fırlatma aracının fırlatma ağırlığı, Dünya'daki 408 tonluk I ve II aşama motorlarının itme gücü ile aynı anda fırlatılan 287 ton ve fırlatma aracının toplam uzunluğu Vostok uzay aracı ile (başın tepesinden) idi. direksiyon odalarının memelerinin kesilmesine kaporta) 38.4 m idi Vostok fırlatma aracı hakkında daha ayrıntılı bilgi "Araçları Başlat" kitabında verilmiştir (M., Voenizdat, 1981).
Uzay gemisi Voskhod- ilk çok koltuklu yörünge uzay aracı - iki modifikasyona sahipti ve iki bölmeden oluşuyordu - bir iniş aracı ve bir fren tahrik sistemine sahip bir alet bölmesi (Voskhod uzay aracı) ve bu bölmelerden ikisi ve bir hava kilidi (Voskhod-2 uzay aracı). "Voskhod" uzay aracının ana teknik özellikleri Tabloda verilmiştir. 3.3.
İlk çok koltuklu uzay aracı Voskhod (pilot-kozmonotlar V. M. Komarov, K. P. Feoktistov, B. B. Egorov) 12 Ekim 1964'te 177.5 km'lik bir perigee, 408 km'lik bir apoje ve 65 °'lik bir eğim ile yörüngeye fırlatıldı; 13 Ekim 1964, SSCB topraklarına yumuşak bir iniş yaptı.
18 Mart 1965'te Voskhod-2 uzay aracı (pilot-kozmonotlar P. I. Belyaev ve A. A. Leonov) 173 km'lik bir perigee, 498 km'lik bir apoje ve 65 °'lik bir eğim ile yörüngeye fırlatıldı. Şişirilebilir bir hava kilidi ve özel ekipman kullanarak, pilot kozmonot A. A. Leonov dünyada ilk kez uzay aracının dışında 12 dakika geçirerek açık alana gitti.
Vostok uzay aracının yerleşik sistemlerine kıyasla Voskhod uzay aracının yerleşik sistemleri aşağıdaki farklılıklara sahipti:
yörüngeden çıkma sırasında yavaşlama için tahrik sistemi, uzay aracının üst kısmına monte edilmiş, 145 kg ağırlığında bir yedek yedek frenleme tozu jet motoruna sahipti;
oryantasyon sistemi, iyon sensörleri kullanan oryantasyon ekipmanı ile desteklendi;
iniş sistemi, süspansiyonlarının tellerinde iki ana paraşüt ve yumuşak bir iniş motoruna sahipti ve bir fırlatma koltuğu yerine, SA'ya mürettebat üyeleri için ayrı yuvalara sahip iki (veya üç) şok emici koltuk yerleştirildi;
yaşam destek sistemine özerk bir el çantasına sahip özel bir elbise ve ayrıca 250 kg ağırlığında şişirilebilir bir kilit odası dahil edildi ve bir kişiye erişim sağladı. boş alan(KK "Voskhod-2").
Voskhod uzay aracının taşıyıcı roketi, Vostok fırlatma aracı temelinde geliştirilen, ancak uzay aracının fırlatma kütlesini artırmayı mümkün kılan daha güçlü bir III aşamasına sahip bir fırlatma aracıydı.
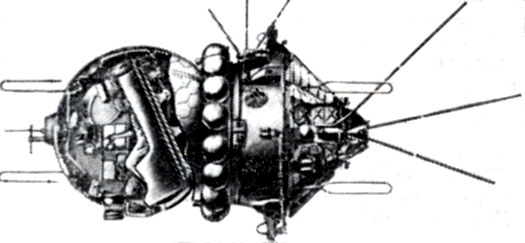
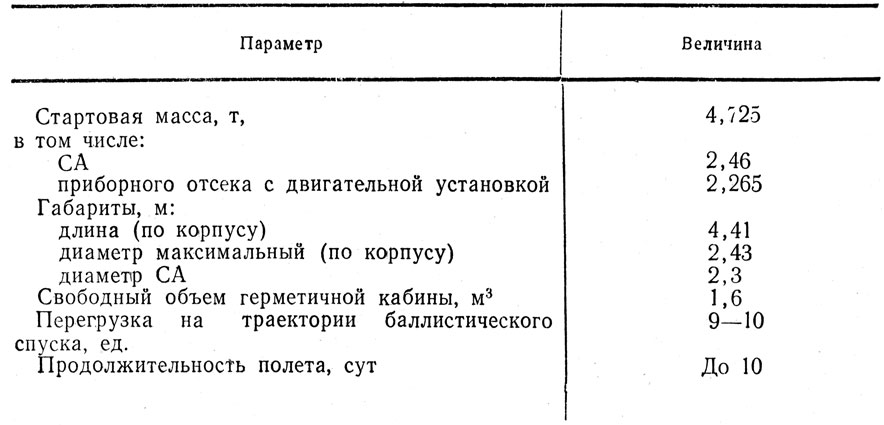
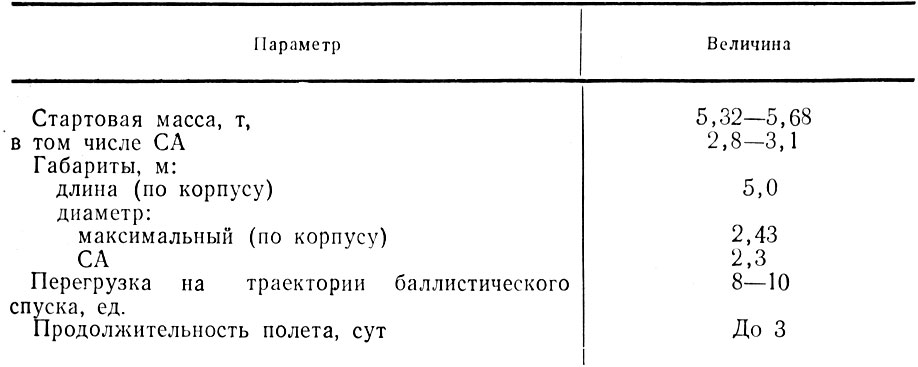
soyuz uzay aracı- ikinci neslin çok amaçlı yörünge uzay aracı. Soyuz uzay aracı (Şekil 3.18) üç bölümden oluşur: yerleştirme düzeneğine (veya özel bir bölmeye) sahip bir yörünge (ev) bölmesi, bir iniş aracı ve bir alet-toplama bölmesi. Başlıca teknik özellikleri tabloda verilmiştir. 3.4. 1962'de Soyuz uzay aracının geliştirilmesine başlandı ve 1964'te yerleşik sistemlerinin ve tasarımının deneysel testleri başladı.
28 Kasım 1966'da Kosmos-133 uydusunda yerleşik sistemlerin ve yapıların uçuş testleri başladı.
Soyuz-1 uzay aracının ilk insanlı test uçuşu 23 Nisan 1967'de gerçekleşti (pilot-kozmonot V. M. Komarov). Gemi 180 km yerberi, 228 km apoje ve 51,6° meyil ile yörüngeye oturtuldu. Ek deneysel testlerden sonra, Soyuz uzay aracının insanlı bir versiyonda uzun süreli çalışması, montaj sırasında Soyuz-3 uzay aracıyla (pilot-kozmonot G.T. Beregovoy) başlayarak, 28 Ekim 1968'de insansız uzay aracı Soyuz-2'ye fırlatıldı. ". 16 Ocak 1969'da yörüngeye yerleştirme sırasında, iki insanlı uzay aracı Soyuz-4 (pilot-kozmonot V.A. Shatalov) ve uzay aracı Soyuz-5 (pilot-kozmonotlar B.V. Volynov, A.S. Eliseev, E.N. Khrunov) 12924 kütleli ilk deney istasyonu kg oluşturuldu ve iki mürettebat üyesinin bir uzay aracından diğerine açık alandan geçişi gerçekleştirildi. Ardından Soyuz-6, Soyuz-7 ve Soyuz-8 uzay araçları yörüngede manevra ve buluşma ile grup uçuşu gerçekleştirdi. Haziran 1970'de Soyuz-9 uzay aracı (pilot-kozmonotlar A.G. Nikolaev ve V. I. Sevastyanov) 17.7 günlük bir uçuş yaptı. 1971 yılında, Soyuz uzay aracı, mürettebatı Salyut yörünge istasyonuna teslim etmek için bir nakliye aracına (TK) yükseltildi ve bu kapasitede 1981'e kadar kullanıldı, Salyut istasyonlarının uzun süreli çalışmasını ve Interkosmos'un uygulanmasını sağladı. programı.
1974'te Soyuz uzay aracı, Soyuz-Apollo programı kapsamında deneysel bir uçuş için değiştirildi. Soyuz-16 uzay aracının uçuşu sırasında (pilot-kozmonotlar A.V. Filipchenko ve N.N. Rukavishnikov), geminin yeni bir versiyonu test edildi ve ortak uçuş, 15-20 Temmuz 1975'te Sovyet uzay aracının katılımıyla gerçekleştirildi. Soyuz- 19" (pilot kozmonotlar A. A. Leonov ve V. N. Kubasov) ve Amerikan uzay aracı "Apollo" (astronotlar T. Stafford, D. Slayton, V. Brand). Uçuş halindeki Soyuz-19 uzay aracı (fotoğraf Apollo uzay aracından alınmıştır) Şekil 2'de gösterilmiştir. 3.19.
15 Eylül 1976'da başlatılan Soyuz-22 uzay aracında (kozmonotlar V.F. Bykovsky ve V.V. Aksenov), bir fotoğraf programı gerçekleştirildi. yeryüzü SSCB ve GDR uzmanları tarafından ortaklaşa geliştirilen ve GDR'de Carl Zeiss Jena ulusal girişiminde üretilen MKF-6 çok bölgeli uzay kamerası kullanılarak.
Soyuz uzay aracının yerleşik sistemleri şunları içerir:
yönlendirme ve hareket kontrol sistemi;
yanaşma ve yönlendirme jet motoru sistemi;
buluşma ve düzeltici tahrik sistemi;
güç kaynağı sistemi;
mürettebat yaşam destek sistemleri kompleksi;
radyo iletişim sistemleri;
yerleştirme sistemi;
inişli araç iniş sistemi;
yerleşik cihaz ve ekipman kompleksinin kontrol sistemi;
acil kurtarma sistemi.
Yönlendirme ve hareket kontrol sistemi hem otomatik hem de manuel modlarda çalışır ve komut cihazlarıyla donatılmıştır: bir gyro kompleksi, oryantasyon sensörleri, bir hızlanma entegratörü, açısal hız sensörleri ve ayrıca dönüştürücü cihazları, anahtarlama mantık cihazları ve görsel kontrol için cihazlar geminin yönü.
SA'da bulunan bu sistemin bir kısmı, iniş bölümünde hareketinin kontrolünü sağlar; yürütme organları, her biri 7,5 kgf nominal itme gücüne sahip dört adım ve sapma motoru ve tek bileşenli yakıtla çalışan (hidrojen peroksit rezervi - 30 kg) nominal itiş gücü 15 kgf olan iki silindirli motor dahil olmak üzere altı yönelimli jet motorudur. , iki tanka yerleştirilmiş ve bir deplasmanlı besleme sistemi ile besleniyor.
Uzay aracının manuel kontrolü için bilgi ve sinyal cihazları, iki komut ve sinyal cihazı ve iki kontrol düğmesi bulunan kozmonot konsolu kullanılır.
Yanaşma ve yönlendirme için jet motorları sistemi, uzay aracının üç eksen etrafında kütle merkezine göre dönüşlerini gerçekleştirmek ve bu eksenlerin her biri boyunca kütle merkezinin küçük yer değiştirmelerini koordine etmek için tasarlanmıştır. Sistem, nominal itme gücü 10 kgf olan on dört yanaşma ve yönlendirme jet motorunu ve nominal itiş gücü 1-1.5 kgf olan sekiz tutum kontrol motorunu ve ayrıca tek bileşenli yakıtlı (hidrojen peroksit rezervi - 140 kg) yakıt depolarını içerir. boru hatları, bir yer değiştirme sistemi ve yakıt besleme ve otomatik sistem. Yaklaşma ve yönlendirme için on dört motordan on tanesi, alet-agrega bölmesinin geçiş bölümünün çerçevesine yakıt depolarının yanında (kütle merkezi bölgesinde) ve kalan dört motor ise bağlama ve yönlendirme için yerleştirilmiştir. , sekiz yönlendirme motorunun yanı sıra alet-agrega bölmesinin agrega bölümünün alt çerçevesine yerleştirilmiştir.

Randevu ve düzeltici tahrik sistemi, uzay aracının boyuna ekseni yönünde hızını değiştirmek için tasarlanmıştır (yörünge düzeltmeleri sırasında ve yörüngeden sapmaya yavaşlama sırasında) ve nominal bir çoklu fırlatma ile ana buluşma ve düzeltici tek odalı motordan oluşur. 417 kgf itme, 411 kgf nominal itme gücüne sahip iki odalı yedek bir motor, dört yakıt deposu, motorlar için yakıt besleme sistemleri ve tahrik sisteminin otomasyonu. Ana motorun çalışması sırasında, uzay aracı, demirleme ve yönlendirme motorları vasıtasıyla ve yedek motorun çalışması sırasında, tahrik sisteminin turbo pompa ünitelerinden birinin gazı üzerinde çalışan direksiyon nozulları vasıtasıyla stabilize edilir. Ana ve yedek motorlar iki bileşenli bir yakıtla çalışır: bir oksitleyici - nitrik asit ve bir yakıt - örneğin hidrazin (yakıt beslemesi, uzay aracının uçuş programına bağlı olarak - 0,5 - 0,9 ton).
Güç kaynağı sistemi, QC cihazı sağlar doğru akım 27 V nominal voltajlı ve bir ana kimyasal pil, bir yedek pil, ayrıca statik akım dönüştürücüler, amper-saat ölçerler ve panolar içerir. Ana bataryanın kapasitesi, uzay aracının kenetlenmeden ÖNCE otonom bir uçuşunu ve ardından Dünya'ya inmeden önce otonom uçuşunu gerçekleştirmek için yeterlidir. Otonom uçuş süresini artırmak için uzay aracına -11 m2 alana sahip güneş panelleri kurulabilir. Otonom SA bataryası, iniş sırasında ve iniş veya su sıçramasından sonra sistemine güç sağlar.
Yaşam destek sistemleri kompleksi, bir dizi uzay giysisi, yaşam bölümlerinin atmosferinin gaz bileşimini sağlamak için sistemler, termal kontrol, yiyecek ve su temini, bir kanalizasyon ve sıhhi tesisat, hijyen ve tıbbi malzeme içerir. Soyuz uzay aracının yerleşim bölümlerinde, rejenerasyon ünitelerinin yardımıyla, yaklaşık 760 mm Hg'lik bir basınca sahip normal bir oksijen-azot atmosferi korunur. Sanat. hacimce %40'a kadar oksijen yüzdesinde olası bir artış ve basınçta 520 mm Hg'ye bir düşüş ile. Sanat.
Uzay giysileri mürettebat tarafından uzay aracının basınçsızlaştırılması sırasında, uzay aracının yörüngeye fırlatılması alanında, yerleştirme sırasında ve ayrıca iniş ve Dünya'ya dönüş alanında kullanılır. Termal kontrol sistemi, soğutucuyu alet-agrega bölmesinin ana gövdesinin dışına monte edilmiş özel radyatörler-yayıcılardan pompalayarak aşırı ısının dış alana boşaltılmasını sağlar. Ek olarak, güneşten gelen ısı akışını ve yapı tarafından kontrolsüz ısı salınımını dışlamak için, uzay aracının tüm bölmeleri çok katmanlı ekran-vakum ısı yalıtımı ile kaplanmıştır. Güç ve su tedarik sistemleri şunları içerir: özel diyetler ve su temin cihazları bulunan tanklardaki su temini; bu sistemler hem yörünge bölmesinde hem de iniş aracında bulunur, komple kanalizasyon ve sıhhi tesisat seti sadece yörünge bölmesindedir.
KK telsiz haberleşme sistemleri, komuta telsiz bağlantısı, telsiz telefon ve telsiz telgraf haberleşme sistemleri, telsiz telemetri, televizyon ve telsiz randevu sisteminden oluşur.
Komut radyo bağlantısı, Dünya'ya bir makbuz verilmesiyle komutların uzay aracına iletilmesini mümkün kılar ve ayrıca yörünge ölçümleri sağlar. Dairesel bir görüntüleme modeline sahip bir multivibratör anteni aracılığıyla radyo dalgalarının desimetre aralığında çalışır.
Telsiz telefon ve telsiz telgraf iletişim sistemi, HF ve VHF bantlarında çalışır, mürettebatın iç iletişimini, mürettebat ile Dünya arasında ve yörüngedeki uzay aracı arasındaki iletişimi sağlar ve ayrıca enstrüman-agrega bölmesinin gövdesine monte edilen antenler aracılığıyla operasyonel telemetri sinyallerini iletir. (veya güneş panelleri) pim şeklinde çeşitli uzunluklar. Aynı sistem SA slot anteni ile iniş sırasında haberleşmeyi, paraşüt sahasında ve iniş sonrası paraşüt hatlarındaki anteni ve iniş aracında açılan antenleri (iniş sonrası) kullanarak haberleşmeyi ve kerterizi sağlar.
Radyo telemetri sistemi, otonom vericiler ve antenler kullanan depolama cihazlarından hem doğrudan iletim modunda hem de oynatma modunda, yerleşik sistemlerin ve SC birimlerinin durumu hakkında telemetrik bilgilerin ve mürettebat üyelerinin refahı hakkındaki verilerin iletilmesine izin verir.
Televizyon sistemi yanaşma ve yanaşma sürecini kontrol etmek ve uzay aracının yaşam alanlarından televizyon raporlarını yürütmek için tasarlanmıştır ve ilk durumda televizyon görüntüsü yerleşik video kontrol cihazına beslenir ve ikinci durumda iletilir. Otonom bir radyo bağlantısı veya bir komuta radyo bağlantısı aracılığıyla Dünya'ya. Sistem yörünge bölmesinde harici kameralara ve SA'da bir TV kamerasına sahiptir.
Radyo randevu sistemi, uzay aracının ve istasyonun, uzay aracı gövdesi ile ilişkili koordinat sistemine, mesafeye göre görüş hattının açısal konumunun ve açısal hızının karşılıklı arama, algılama ve müteakip ölçümleri ile otomatik buluşma ve yerleştirme için tasarlanmıştır. uzay aracı veya uzay aracı ile istasyon arasındaki, uzay aracının nispi hızının radyal bileşeni ve yerleştirme uzay aracı ile istasyon arasındaki karşılıklı yuvarlanma açısı. Sistem, uzay aracı veya uzay aracı ile istasyon arasındaki yaklaşık 20 km'lik bir mesafeden, karşılıklı açısal konumlarının önceden belirlenmesi olmaksızın 40 - 60 m/s'ye kadar nispi bir hızda çalışmaya başlar. "Aktif" ve "pasif" uzay aracı ve istasyonları, aynı anket ve yatak antenlerine sahiptir. Ek olarak, “pasif” SC veya istasyonda iki işaret anteni, bir tekrarlayıcı anten ve bir rulo anten bulunur ve “aktif” olanın, bir tekrarlayıcı anten ile çalışan bir cayro stabilize yönlendirme anteni (gimballerde) ve bir istek anteni vardır. araştırma antenine demirleme modunda çalışan ve "pasif" uzay aracı veya istasyonunun yatağı. Telsiz yönlendirme sisteminin elektronik ekipmanı, Soyuz uzay aracının yörünge bölmesine ve Salyut istasyonunun çalışma bölmesine kurulur.
Soyuz uzay aracı yerleştirme sistemi, yerleştirme sırasında gerekli çalışma modlarını ayarlayan bir yerleştirme ünitesi ve yerleştirme otomasyon cihazlarından oluşur. Yerleştirme ünitesi, uzay aracı yörünge bölmesinin üst kısmına monte edilmiştir ve 800 mm çapında bir kapağı vardır.
İniş aracının mürettebatla birlikte inişini sağlayan iniş sistemi, ana ve yedek paraşüt sistemlerini, altimetre komutuyla tetiklenen dört yumuşak inişli katı yakıtlı motoru (SA gövdesinde), şok emici koltukları ve sistemi içerir. otomasyon.
Yerleşik enstrümantasyon ve ekipman kompleksinin kontrol sistemi, uzay aracının tüm bölmelerinde bulunan anahtarlama ve mantık cihazlarından oluşur.
Acil kurtarma sistemi, fırlatma sırasında ve yörüngeye uzay aracı fırlatma sahasında bir fırlatma aracı kazası durumunda mürettebatın güvenliğini sağlamak için tasarlanmıştır ve her iki özel aracın (tahrik sistemi, otomasyon vb.) .) ve standart uzay aracı sistemleri (bkz. Bölüm 10) .
Ağırlıklı olarak alüminyum alaşımdan üretilen iniş aracı, inişten önce düşürülen ön ısı kalkanının yanı sıra yandan ısı korumasına ve iç ısı yalıtımına sahip.
Alet-agrega bölmesi alüminyumdan yapılmıştır ve yörünge bölmesi magnezyum alaşımlarından yapılmıştır.
Soyuz uzay aracını uydu yörüngesine fırlatmak için, fırlatma ağırlığı 310 tona kadar, toplam uzunluğu (Soyuz uzay aracıyla birlikte) 49.3 m'ye kadar ve maksimum hava boyutuna sahip üç aşamalı bir Soyuz fırlatma aracı kullanılır. yan roket bloklarındaki dümenler - 10.3 m (Şekil 3.20)
Aşama I (Vostok fırlatma aracı gibi), her biri 19,8 m uzunluğunda ve 2,68 m çapında, dört odacıklı (iki ilave direksiyon odalı) RD-107 motorlarıyla donatılmış dört yanal füze ünitesine sahiptir.
İkinci aşama, 27,76 m uzunluğunda (Vostok fırlatma aracı için - 28,75 m), maksimum 2,95 m çapında, dört odalı (dört ek direksiyon odalı) RD-108 motorla donatılmış merkezi bir füze bloğu içerir.
Aşama III, boşlukta bir itme ile dört odalı bir motor (direksiyon memeleri ile) ile donatılmış, 8.1 m uzunluğunda ve 2.66 m çapında (Vostok fırlatma aracı için - sırasıyla 2.98 m ve 2.58 m) bir roket ünitesinden oluşur. 29.5 tf (Vostok fırlatma aracında - 5.6 tf'lik tek odacıklı bir itme).
Tüm aşamaların motorları gazyağı ve sıvı oksijenle çalışır. Lansman sırasında, I ve II aşamalarının motorları aynı anda çalıştırılır ve Dünya üzerinde 418 tf'lik bir itme gücü geliştirilir.
İkinci aşama motor, yan roket podları düşürüldükten sonra çalışmaya devam ediyor. Vasıtasıyla kesin zaman kafa kaplaması KK sıfırlanır. Üçüncü aşama motor, ikinci aşama motor çalışmasının sonunda, ayrılmadan önce çalıştırılır, ardından üçüncü aşamanın kuyruk kısmı düşürülür. Fırlatma aracının tüm aşamalarının motorlarının aktif bölümünün süresi yaklaşık 9 dakikadır.
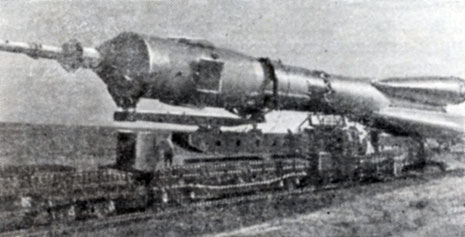
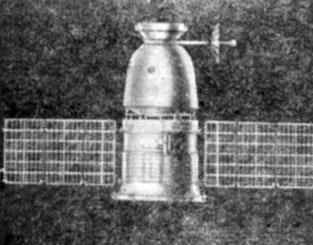
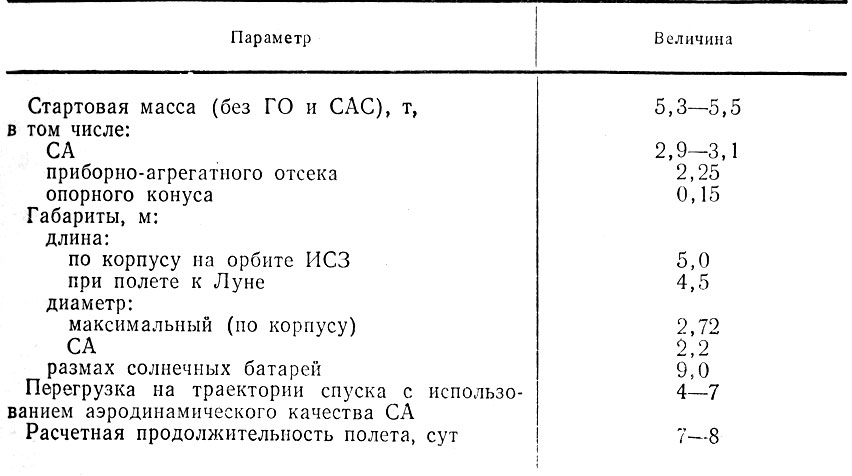
Uzay aracı veya otomatik gezegenler arası istasyon (AMS) "Zond"- KK, Dünya'ya dönüşle birlikte Ay'a uçuş tekniğini geliştirmek için. AMS "Zond" (Şekil 3.21), bir SA ve bir alet-agrega bölmesinin yanı sıra, Ay'a fırlatılmadan önce pruvaya yerleştirilmiş 150 kg ağırlığında bir destek konisinden oluşuyordu.
AMS "Zond" un ana teknik özellikleri Tabloda verilmiştir. 3.5.
Ay'a fırlatma, 187 km'lik bir yerberi ve 219 km'lik bir apoje ile bir ara yörüngeden gerçekleştirildi.
AMS "Zond-5"in Ay'a ilk uçuşu 15 Eylül 1968'de gerçekleştirildi. Ay'ın çevresini dolaşan AMS, ikinci gezegenden Dünya atmosferine girdi uzay hızı ve Hint Okyanusu'na balistik bir yörünge boyunca iniş gerçekleştirdi (Şekil 3.22). 10 Kasım 1968'de (Zond-6) ve 8 Ağustos 1969'da (Zond-7) başlatılan AMS'de, Ay'ın bir uçuşu üzerinde çalıştılar ve atmosferde kontrollü bir inişle Dünya'ya döndüler. SSCB toprakları. 20 Ekim 1970'te (“Zond-8”) başlatılan AMS'nin uçuşu sırasında, kuzey yarımkürenin yanından Dünya'ya geri dönmenin bir çeşidi üzerinde çalışıldı.
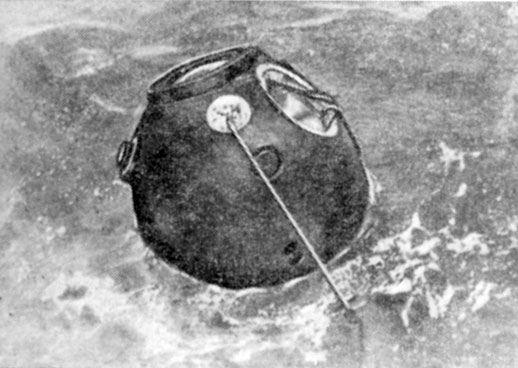
Uçuşlar sırasında, Dünya ve Ay'ın çeşitli mesafelerden fotoğrafları da dahil olmak üzere değerli materyaller elde edildi ve AMS "Zond-5" gemisinde canlılar vardı - kaplumbağalar.
AMS "Zond"un yerleşik sistemleri aşağıdaki özelliklere sahipti:
yeni geliştirilen oryantasyon ve hareket kontrol sisteminde bir gyro platformu, güneş ve yıldız oryantasyon sensörleri ve özel bir bilgisayar vardı;
SA'nın iniş bölümündeki hareketini kontrol eden jet motorlarının sayısı, onları yuvarlanma kanalı boyunca çoğaltmak için artırıldı;
1 - 1.5 kgf nominal itme gücüne sahip yönlendirme jet motorları sisteminde yedekli sekiz motor seti vardı;
düzeltici tahrik sistemi tek odacıklı Jet motoru 0,4 ton yakıt kütlesi ile direksiyon nozulları ile donatılmış 410 kgf nominal itme gücü;
güç kaynağı sisteminde, tampon kimyasal pili şarj etmek için 11 m 2 alana sahip güneş pilleri vardı;
uzun menzilli radyo iletişim sistemi, uzun mesafelerde güvenilir iletişim sağlamak için desimetre dalga aralığında çalışan oldukça yönlü bir antenle donatıldı;
DV'nin termal koruması, DV'nin ikinci kozmik hızda atmosfere girişi sırasında ısınması dikkate alınarak modernize edildi;
iniş sistemi, 1000 m2 alana sahip ana paraşüt, yumuşak iniş motorları ve otomatik sistem kontrolü ile bir paraşüt sistemine sahipti;
acil kurtarma sisteminin tahrik sistemi, fırlatma aracının özellikleri dikkate alındığında daha güçlüydü.
Roket ve uzay sistemi, AMS'yi Ay'a fırlatmak için ek bir güçlendirici aşamaya sahip Proton tipi bir fırlatma aracı içeriyordu.
Soyuz T uzay aracı(Şekil 3.23) - Soyuz uzay aracının geliştirilmesi ve işletilmesi deneyimi dikkate alınarak oluşturulan geliştirilmiş üç koltuklu bir yörünge uzay aracı - bir yerleştirme ünitesi, bir iniş aracı ve bir alet içeren bir yörünge (ev) bölmesinden oluşur- yeni bir tasarımın toplu bölmesi.
"Soyuz T" uzay aracının ana teknik özellikleri Tabloda verilmiştir. 3.6.
16 Aralık 1979'da Salyut-6 istasyonu ile buluşma ve yerleştirme operasyonlarını uygulamak ve 100 günlük bir uçuş gerçekleştirmek için Soyuz T uzay aracı, yörünge kompleksinin bir parçası olarak insansız bir versiyonda fırlatıldı. Soyuz T-2 uzay aracının (kozmonotlar Yu. V. Malyshev ve V. V. Aksenov) Salyut-6 istasyonuna kenetlenen ilk insanlı test uçuşu 5 Haziran 1980'de gerçekleşti. 27 Kasım 1980'de uzay aracı " Soyuz T -3” (kozmonotlar L.D. Kizim, O.G. Makarov, G.M. Strekalov). Uçuşun ana görevi, nakliye gemisini tam ekiple test etmekti.
12 Mart 1981'de, uçuşu Soyuz T uzay aracının düzenli çalışmasının başlangıcını işaret eden Soyuz T-4 uzay aracı (kozmonotlar V.V. Kovalenok ve V.P. Savinykh) fırlatıldı.
Soyuz T uzay aracı, Soyuz fırlatma aracı tarafından yörüngeye fırlatılır.
Soyuz T uzay aracının yerleşik sistemleri, Soyuz uzay aracına kıyasla aşağıdaki özelliklere sahiptir:
hareket kontrol sistemi askılama prensipleri üzerine inşa edilmiştir (jiroskop veya jiroskop yoktur) atalet sistemi yerleşik dijital bilgisayar sistemine dayalı; Dünya ve Güneş dahil tüm yönlendirme modları hem otomatik olarak hem de katılımla gerçekleştirilir! mürettebat ve buluşma modları - radyo randevu sisteminden gelen bilgileri kullanarak BTsVK göreceli hareket yörüngelerini ve optimal manevraları kullanan hesaplamalara dayanarak; sistem dinamik işlemleri, yakıt tüketimini, bir dizi alet ve ünitenin durumunu otomatik olarak kontrol eder ve çalışma modunu değiştirme veya yedek ekipman setlerine geçiş hakkında kararlar alabilir; sistem, yerden veya mürettebat tarafından bir ekran dahil olmak üzere yerleşik bilgi giriş ve görüntüleme cihazları kullanılarak bir komuta radyo bağlantısı aracılığıyla kontrol edilir, uçuş ve inişin herhangi bir aşamasında manuel kontrole geçme yeteneği sağlar; gimbal süspansiyonda 315 kgf itme gücüne sahip bir destekleyici motora sahip randevu düzeltici tahrik sistemi, güç açısından yanaşma ve yönlendirme motorları sistemi ile birleştirilir, ortak tanklarda ortak yakıt bileşenleri kullanır; böyle bir kombine tahrik sisteminin (CPU) kullanılması, özellikle acil durumlarda, bir uçuş programını yürütürken optimum kullanımını ve esnekliğini sağlayan farklı motorlar arasında yakıtın yeniden dağıtılmasını mümkün kılar; kombine tahrik sistemi, her biri 14 kgf'ye kadar nominal itiş gücüne sahip on dört yanaşma ve yönlendirme motoruna ve her biri 2,5 kgf nominal itiş gücüne sahip on iki motora sahiptir;
güç kaynağı sistemi, otonom uçuş süresinin kimyasal akım kaynaklarının kapasitesine bağımlılığı (güç kaynağı açısından) hariç, güneş panelleri ile donatılmıştır;
yaşam destek sistemleri kompleksi, gazlı oksijen ve karbon dioksit emici rezervleri kullanan üç kişiye kadar bir ekip için tasarlanmıştır, uzay giysileri geliştirilmiş bir tasarıma sahiptir;
termal kontrol sistemi yeni hidrolik üniteler, radyatör-verici ve otomasyon ile donatılmıştır;
radyo iletişim sistemleri, bir televizyon sistemine sahiptir. en iyi kalite görüntü aktarımı, gelişmiş komut ve program radyo bağlantısı ve radyo telemetri sistemi, olağan olanlara ek olarak "anten dizisi" tipi antenler kullanılır;
yeni geliştirmenin yerleşik kompleksinin kontrol sistemi güvenilirliği artırdı, kozmonotların konsolu geliştirildi;
SA iniş sistemi, yeni paraşüt sistemleri ve otomasyonu, yüksek enerjili yumuşak iniş motorları ve fırlatılmaları için bir altimetre ile donatılmıştır;
acil kurtarma sistemi yeni katı yakıtlı motorlarla donatılmıştır ve özellikle SA'yı tehlike bölgesinden çıkarma konusunda gelişmiş özelliklere sahiptir.




 Английский вокруг нас исследовательская работа")
