Kushti i dytë për ekuilibrin e trupit. Kushtet e ekuilibrit për një trup të ngurtë
Sistemi i forcave të quajtur. i balancuar, nëse nën veprimin e këtij sistemi trupi qëndron në qetësi.
Kushtet e ekuilibrit:
Kushti i parë i ekuilibrit trup i fortë:
Për ekuilibrin e një trupi të ngurtë, është e nevojshme që shuma forcat e jashtme aplikuar në trup ishte e barabartë me zero.
Kushti i dytë për ekuilibrin e një trupi të ngurtë:
Kur një trup i ngurtë është në ekuilibër, shuma e momenteve të të gjitha forcave të jashtme që veprojnë mbi të rreth çdo boshti është e barabartë me zero.
Kushti i përgjithshëm i ekuilibrit për një trup të ngurtë:
Për ekuilibrin e një trupi të ngurtë, shuma e forcave të jashtme dhe shuma e momenteve të forcave që veprojnë në trup duhet të jetë e barabartë me zero. Shpejtësia fillestare e qendrës së masës dhe shpejtësia këndore e rrotullimit të trupit gjithashtu duhet të jetë e barabartë me zero.
Teorema. Tre forca balancojnë një trup të ngurtë vetëm nëse të gjitha shtrihen në të njëjtin rrafsh.
11. Sistemi i sheshtë i forcave janë forca në të njëjtin rrafsh.
Tre forma të ekuacioneve të ekuilibrit për një sistem të sheshtë:
Qendra e gravitetit të trupit.
qendra e gravitetit trupa me madhësi të fundme quhet pika, në lidhje me të cilën shuma e momenteve të rëndesës së të gjitha grimcave të trupit është e barabartë me zero. Në këtë pikë zbatohet forca e gravitetit të trupit. Qendra e gravitetit të një trupi (ose sistemi i forcave) zakonisht përkon me qendrën e masës së trupit (ose sistemin e forcave).
Qendra e gravitetit të një figure të sheshtë:
Një mënyrë praktike për të gjetur qendrën e masës së një figure të rrafshët: varni trupin në fushën e gravitetit në mënyrë që të mund të rrotullohet lirshëm rreth pikës së pezullimit O1 . Qendra e masës në ekuilibër NGA është në të njëjtën vertikale me pikën e pezullimit (poshtë saj), pasi është e barabartë me zero
momenti i gravitetit, i cili mund të konsiderohet i aplikuar në qendër të masës. Duke ndryshuar pikën e pezullimit, në të njëjtën mënyrë gjejmë një vijë tjetër të drejtë Rreth 2 C , duke kaluar nëpër qendrën e masës. Pozicioni i qendrës së masës jepet nga pika e kryqëzimit të tyre.
Qendra e shpejtësisë së masës:
Momenti i një sistemi grimcash është i barabartë me produktin e masës së të gjithë sistemit M= Σmi me shpejtësinë e qendrës së saj të masës V :
![]()
Qendra e masës karakterizon lëvizjen e sistemit në tërësi.
15. Fërkimi i rrëshqitjes- fërkimi gjatë lëvizjes relative të trupave kontaktues.
Fërkimi i pushimit– fërkimi në mungesë të lëvizjes relative të trupave kontaktues.
forca e fërkimit rrëshqitës Ftr ndërmjet sipërfaqeve të trupave kontaktues gjatë lëvizjes së tyre relative varet nga forca e reaksionit normal N , ose nga forca e presionit normal PN , dhe Ftr=kN ose Ftr=kPn , ku k – koeficienti i fërkimit të rrëshqitjes , e cila varet nga të njëjtët faktorë si koeficienti i fërkimit statik k0 , si dhe në shpejtësinë e lëvizjes relative të trupave kontaktues.
16. Fërkimi i rrotullimitështë rrotullimi i një trupi mbi një tjetër. Forca e fërkimit të rrëshqitjes nuk varet nga madhësia e sipërfaqeve fërkuese, por vetëm nga cilësia e sipërfaqeve të trupave fërkues dhe nga forca që redukton sipërfaqet e fërkimit dhe drejtohet pingul me to. F=kN, ku F- forca e fërkimit, Nështë vlera e reaksionit normal dhe k është koeficienti i fërkimit të rrëshqitjes.
17. Ekuilibri i trupave në prani të fërkimit- kjo është forca maksimale e ngjitjes proporcionale me presionin normal të trupit në aeroplan.
Këndi ndërmjet reaksionit total, i ndërtuar mbi forcën më të madhe të fërkimit për një reaksion normal të caktuar, dhe drejtimit të reaksionit normal quhet këndi i fërkimit.
Një kon me kulm në pikën e aplikimit të reaksionit normal të një sipërfaqeje të ashpër, gjenerata e të cilit bën këndin e fërkimit me këtë reagim normal, quhet koni i fërkimit.
Dinamika.
1. AT dinamika merret parasysh ndikimi i bashkëveprimeve ndërmjet trupave në lëvizjen e tyre mekanike.
Pesha- kjo është karakteristikë e pikturës së një pike materiale. Masa është konstante. Pesha është shtesë (shton)
Forcë - ky është një vektor që karakterizon plotësisht bashkëveprimin e një pike materiale në të me pikat e tjera materiale.
Pika materiale- një trup, dimensionet dhe forma e të cilit janë të parëndësishme në lëvizjen e konsideruar (p.sh.: në lëvizje përkthimore, një trup i ngurtë mund të konsiderohet një pikë materiale)
sistemi i materialit pikat e quajtura shume nga pikat materiale duke ndërvepruar me njëri-tjetrin.
1 Ligji i Njutonit:çdo pikë materiale ruan një gjendje pushimi ose lëvizje drejtvizore uniforme derisa ndikimet e jashtme ta ndryshojnë këtë gjendje.
Ligji i 2-të i Njutonit: nxitimi i fituar nga një pikë materiale në sistemi inercial referencë, drejtpërdrejt proporcionale me forcën që vepron në pikë, në përpjesëtim të zhdrejtë me masën e pikës dhe përkon në drejtim me forcën: a=F/m
Ligji i 3-të i Njutonit: forcat e bashkëveprimit të dy pikave materiale në një kornizë inerciale të referencës janë të barabarta në vlerë absolute dhe të drejtuara në drejtime të kundërta : Fik= - Fki
Në statikë, si dhe në kinematikë (n° 51), një sistem pikash materiale, të lidhura pa ndryshim me njëra-tjetrën, quhet trup i ngurtë. Prandaj, ky sistem është një trup absolutisht i ngurtë, pikat e të cilit qëndrojnë në distancë konstante nga njëra-tjetra, pavarësisht nga forcat që veprojnë në këto pika dhe cilado qoftë lëvizja e trupit.
Trupi i përcaktuar në këtë mënyrë është, natyrisht, një idealizim. Para së gjithash, fizika na mëson se trupat e ngurtë përbëhen nga molekula, të cilat vetë kanë një strukturë shumë komplekse dhe mund të jenë në një shumëllojshmëri të gjerë lëvizjesh të fshehura. Bëhet fjalë për molekulat e marra në pozicionet e tyre të mesme me të cilat mund të thuhet se mbeten në një masë të madhe përafrimet në të njëjtën
distanca të njëjta nga njëra-tjetra. Kështu, ne mund t'i shikojmë molekulat në pozicionet e tyre të mesme këtu vetëm si pika materiale. Por kjo nuk është e gjitha; edhe nëse neglizhojmë lëvizjet e fshehura molekulare dhe i kushtojmë vëmendje vetëm lëvizjeve të dukshme të grimcave, atëherë edhe atëherë të gjithë trupat e natyrës ndryshojnë formën e tyre nën veprimin e forcave të aplikuara ndaj tyre; forcat e brendshme që veprojnë ndërmjet grimcave të të njëjtit trup varen, siç e dimë (n° 109), nga këto deformime. Megjithatë, meqenëse deformimet e trupave të quajtur "të ngurtë" në fizikë janë shumë të vogla, ato mund të neglizhohen në përafrimin e parë, përveç nëse forcat e aplikuara ndaj trupave janë shumë të mëdha dhe nëse nuk studiojmë forcat e brendshme. Përcaktimi i forcave të brendshme dhe deformimeve të dukshme që ndodhin në trupat e ngurtë është një detyrë e vështirë, që nuk lidhet më me statikën, por me teorinë e elasticitetit. Teoria që do të paraqesim është e zbatueshme për trupat e ngurtë me saktësi më të madhe. trupat fizikë aq më shumë i afrohen një trupi krejtësisht të ngurtë.
Nga pikëpamja logjike, statika gjeometrike e një trupi të ngurtë duhet të konsiderohet si teoria e kufirit. Ajo niset numër i njohur ligjet e përgjithshme të zbatueshme për të gjitha trupat e ngurtë, pavarësisht nga struktura e tyre molekulare dhe vetitë e tyre elastike, nëse vetëm deformimet mund të konsiderohen pafundësisht të vogla. Megjithatë, teoria e ndërtuar në këtë mënyrë është një teori jo e plotë e ekuilibrit, pasi sistematikisht lë mënjanë vetitë elastike, përfshirja e të cilave bëhet absolutisht e nevojshme në disa raste. Në këto raste, metodat e statikës gjeometrike rezultojnë të pamjaftueshme për zgjidhjen e të gjitha pyetjeve që mund të na shtrojë problemi i ekuilibrit. Disa nga këto pyetje madje mund të rezultojnë të jenë kontradiktore, nëse ruhet hipoteza e pandryshueshmërisë absolute të një trupi të ngurtë.
Një kusht i mosdeformueshmërisë nuk mjafton për të vërtetuar teorinë e ekuilibrit të trupave të ngurtë;
kësaj duhet t'i shtohet, si një shtesë e përkufizimit të një trupi të ngurtë, postulati i mëposhtëm mekanik:
Postulat. - Pa ndryshuar asgjë në kushtet e ekuilibrit të një trupi të ngurtë, mund të shtohen ose zbriten dy forca të barabarta dhe drejtpërdrejt të kundërta të aplikuara në dy pika të tij.
Ky postulat mund të rrjedhë nga një parim i përgjithshëm i njohur si parimi i zhvendosjeve virtuale, por ne nuk do ta bëjmë këtë për momentin. Ne do të vendosim parimin e përmendur në një nga kapitujt e mëposhtëm si bazë e statikës analitike. Do të ishte gjithashtu e kotë të prezantohej ky postulat nëse pranojmë ligjet bazë të dinamikës në formën në të cilën i kemi paraqitur në pjesën e mëparshme të kursit, pasi postulati në shqyrtim, siç do të shohim më vonë, është i thjeshtë. rast i veçantë një teorema e përgjithshme dinamika e trupit të ngurtë. Nëse e prezantojmë këtu, e bëjmë këtë për të ruajtur karakterin e një disipline të pavarur pas statikes. Ne do ta shikojmë këtë postulat, nga pikëpamja e fizikës, si pasojë e drejtpërdrejtë e përvojës; nga i njëjti këndvështrim mekanika teorike ne do ta konsiderojmë atë si një shtesë në përkufizimin e një trupi të ngurtë të adoptuar në statikë, ndërsa fitojmë avantazhin se jemi të çliruar nga futja e hipotezës molekulare.
Siç është vërejtur tashmë në teorinë e vektorëve (§ 28), ky postulat bazë sjell si pasojë propozimin e mëposhtëm:
Pa shkelur kushtet e ekuilibrit të një trupi të ngurtë, mund të transferohet pika e aplikimit të forcës në një pikë arbitrare në vijën e tij të veprimit, me kusht që kjo pikë e re të lidhet me trupin.
Vetëkuptohet se kjo fjali flet vetëm për gjendjen e ekuilibrit të trupit dhe jo për veprimet që ushtrojnë pika të ndryshme të trupit mbi njëra-tjetrën, pasi këto veprime të brendshme, natyrisht, do të ndryshojnë kur pika e zbatimit të forca e treguar ndryshon.
Operacioni mund të kryhet, për shembull, kur një trup i ngurtë vendoset në disa mbështetëse, por në asnjë rast nuk mund të argumentohet se transferimi i forcës në këtë rast nuk do të ndryshojë reagimet e mbështetësve. Prandaj, do të ishte një gabim i madh të zbatohej parimi i transferimit të forcës në përcaktimin e reagimeve të mbështetësve, duke transferuar, për shembull, një ose një tjetër prej forcave të aplikuara në pikëmbështetje. Të vetmet kushte që mund të zbatohen në mënyrë legjitime në këtë rast janë kushtet e përgjithshme të ekuilibrit, pasi këto të fundit janë gjithmonë kushte të nevojshme.
185. Zvogëlimi i forcave të aplikuara në një trup të ngurtë (pikëpamja statike).
Sapo kemi parë se është e mundur, pa prishur ekuilibrin e një trupi të ngurtë, të kryhen veprimet e mëposhtme mbi forcat e aplikuara në pikat e trupit:
1°. Shtimi ose zgjerimi i forcave të aplikuara në një pikë.
2°. Mbledhja ose zbritja e dy forcave të barabarta dhe drejtpërdrejt të kundërta.
3°. Transferimi i forcës në një pikë arbitrare në vijën e saj të veprimit.
Këto operacione, siç u vendos në teorinë e vektorëve (Sec. 29), janë pikërisht ato operacione elementare që bëjnë të mundur sjelljen e dy sistemeve ekuivalente vektorësh me njëri-tjetrin. Nga kjo marrim teoremën e mëposhtme:
Pa shkelur ekuilibrin e një trupi të ngurtë, është e mundur të zëvendësohet çdo sistem forcash të aplikuara në trup me një sistem tjetër forcash, i cili është një sistem vektorësh ekuivalent me të parin.
Dy sisteme të tilla forcash quhen ekuivalente.
Problemi i zvogëlimit të një sistemi forcash të aplikuara në një trup të ngurtë përkon kështu me problemin e reduktimit të një sistemi vektorësh, kështu që mund të nxjerrim përfundimet e mëposhtme:
1°. Reduktimi në dy forca. Sistemi i forcave të aplikuara në një trup të ngurtë mund të reduktohet,
çekuilibër, vetëm për dy forca, nga të cilat njëra zbatohet në një pikë të zgjedhur në mënyrë arbitrare të trupit (n ° 26).
2°. Reduktim në forcë dhe në një çift. Sistemi i forcave të aplikuara në një trup të ngurtë mund të reduktohet, pa prishur ekuilibrin, në një forcë të aplikuar në një pikë arbitrare O të trupit dhe në një palë. Forca është rezultante R e të gjitha forcave të sistemit të transferuara në pikën O ( vektori kryesor), dhe momenti i çiftit është i barabartë me momentin kryesor O të sistemit të forcave në lidhje me të njëjtën pikë (n ° 24).
Në mënyrë që sistemi i forcave të reduktohet në një R rezultante, është e nevojshme dhe e mjaftueshme që, për një qendër reduktimi të marrë në mënyrë arbitrare O, shuma gjeometrike R të jetë e ndryshme nga zero dhe momenti që rezulton G (nëse nuk është e barabartë me zero) është pingul me R. Rezultantja drejtohet në këtë rast përgjatë boshtit qendror të sistemit.
Në mënyrë që sistemi të reduktohet në një çift, është e nevojshme dhe e mjaftueshme që vektori kryesor R të jetë i barabartë me zero, dhe momenti kryesor O të jetë i ndryshëm nga zero. Në këtë rast, momenti kryesor i sistemit është i njëjtë për çdo pikë në hapësirë.
Së fundi, nëse vektorët R dhe G janë të dy zero, atëherë sistemi është i barabartë me zero, dhe trupi do të jetë në ekuilibër. Ne do ta shqyrtojmë këtë rast në pjesën tjetër.
Forcat në një aeroplan. - Kur të gjitha forcat veprojnë në të njëjtin rrafsh, dhe shuma e tyre gjeometrike R nuk është e barabartë me zero, momenti që rezulton G (si dhe momenti i secilës forcë) është pingul me R. Prandaj, këto forca reduktohen në një R rezultante aplikuar në pikën e boshtit qendror (i shtrirë, padyshim, në rrafshin e veprimit të forcave). Nëse R është e barabartë me zero, atëherë sistemi reduktohet në një çift, dhe nëse, përveç kësaj, G është i barabartë me zero, atëherë sistemi është në ekuilibër.
Është e dobishme të theksohet se çdo sistem i sheshtë i forcave mund të reduktohet gjithmonë në dy forca, adj. në dy pika të dhëna A dhe rrafshi,
Në të vërtetë, çdo forcë t e aplikuar në një pikë O, e cila shtrihet jashtë vijës AB, zbërthehet, përgjatë drejtimeve OA dhe OB, në dy komponentë që mund të transferohen në pikat A dhe B. Nëse pika O e aplikimit të forca shtrihet në AB, dhe linja ku veprimi i forcës kalon përmes A, atëherë pika e aplikimit të forcës mund të transferohet nëse vija e veprimit të forcës nuk kalon përmes A, atëherë pika e aplikimit të forcës mund të të transferohen përgjatë vijës së veprimit përtej vijës së drejtë AB, e cila të çon në rastin e parë.
forcat paralele. - Nëse forcat janë paralele dhe shuma e tyre gjeometrike R nuk është e barabartë me zero, atëherë momenti rezultues G është pingul me R, dhe, për rrjedhojë, këto forca reduktohen në një R rezultues të aplikuar në një pikë të boshtit qendror (paralel drejt drejtimit të përgjithshëm të forcave). Nëse R është i barabartë me zero, atëherë sistemi reduktohet në një çift ose është në ekuilibër (kur momenti i çiftit është i barabartë me zero).
186. Ekuilibri i një trupi të ngurtë.
Për ekuilibrin e një trupi të ngurtë të lirë, është e nevojshme dhe e mjaftueshme që sistemi i forcave të aplikuara në të (d.m.th., në këtë rast, forcat e jashtme) të jetë i barabartë me zero.
Ne tashmë e dimë se ky kusht është i nevojshëm, pasi është një kusht i përgjithshëm ekuilibri.
Për një trup të ngurtë, rezulton gjithashtu i mjaftueshëm. Në të vërtetë, nëse një sistem forcash është i barabartë me zero, ai mund të zvogëlohet në zero nga operacionet elementare dhe, për rrjedhojë, thjesht mund të hidhen poshtë të gjitha forcat që e përbëjnë atë. Bazuar në këtë, kemi dy kushte ekuilibri në formë vektoriale
Këto kushte ndahen në gjashtë ekuacione algjebrike. Le të jenë X, Y, Z projeksionet e vektorit R në tre boshte koordinative drejtkëndëshe, ose shuma e projeksioneve të të gjitha forcave në të njëjtin bosht; le më tej L, M,
Momentet rezultuese të sistemit të këtyre forcave rreth të njëjtave boshte; atëherë këto gjashtë ekuacione do të jenë:
Shpesh thuhet se tre ekuacionet e para (ekuivalente me R = 0) janë kushtet e ekuilibrit për lëvizje përpara, dhe tre të fundit (ekuivalente me barazinë G = 0) janë kushtet e ekuilibrit për rrotullim. Ne do të marrim bazën për emra të tillë më vonë, kur zbatojmë parimin e punës virtuale për zgjidhjen e të njëjtit problem.
187. Reduktimi i forcave të aplikuara në një trup të ngurtë (pikëpamja dinamike). ekuilibër dinamik.
Në dinamikën e një trupi të ngurtë, do të tregojmë se në rastin e një trupi të ngurtë të lirë, lëvizja e tij do të përcaktohet plotësisht nëse për çdo moment të kohës vektori kryesor dhe momenti kryesor në lidhje me një pikë të të gjitha forcave të aplikuara në të. janë dhënë. Prandaj kemi teoremën e mëposhtme:
Nëse dy sisteme forcash të aplikuara në një trup të ngurtë janë vazhdimisht ekuivalente me njëri-tjetrin nga pikëpamja e teorisë së vektorëve, atëherë ato do të jenë ekuivalente nga pikëpamja e lëvizjes së trupit.
Kjo teoremë është në thelb e lidhur me dinamikën, por gjithashtu është e lidhur ngushtë me statika gjeometrike. Në të vërtetë, kjo mund të vërtetohet nga një përgjithësim shumë i thjeshtë i postulatit bazë, i cili përpunon përkufizimin e një trupi të ngurtë në statikë (n° 184).
Në të vërtetë, ne e zëvendësojmë këtë postulat me sa vijon:
Pa ndryshuar asgjë në gjendjen e prehjes ose lëvizjes së një trupi të ngurtë, mund të shtohen ose zbriten dy forca të barabarta dhe drejtpërdrejt të kundërta të aplikuara në dy pika të trupit.
Ky postulat më i përgjithshëm, i cili mund të verifikohet edhe drejtpërdrejt nga përvoja, na lejon të japim sa vijon
i njëjti përgjithësim i konceptit të reduktimit dhe ekuivalencës së forcave. Në të vërtetë, në të gjitha fjalitë e § 185, fjalët "pa prishur ekuilibrin" mund të zëvendësohen me fjalët "pa ndryshuar asgjë në gjendjen e pushimit apo lëvizjes së trupit". Pastaj përfundimi i n°185 rezulton të jetë i barabartë me parimin dinamik të deklaruar këtu.
Në veçanti, vërejmë një përfundim:
Nëse një trup i ngurtë nën veprimin e një sistemi forcash S qëndron në ekuilibër, atëherë ky sistem forcash (duke qenë i barabartë me zero) nuk mund të ndryshojë asgjë edhe në gjendjen e lëvizjes së trupit, nëse ky i fundit nuk është më në qetësi.
Tani është krejtësisht e natyrshme të vendoset përkufizimi i mëposhtëm:
Një sistem i caktuar forcash është në ekuilibër nga pikëpamja e dinamikës, ose në ekuilibër dinamik nëse forcat nuk mund të ndryshojnë gjendjen e prehjes ose lëvizjen e trupit të ngurtë ndaj të cilit zbatohen.
Me këtë përkufizim, ne mund të bëjmë propozimin e mëposhtëm:
Në mënyrë që forcat e aplikuara në një trup të ngurtë të jenë në ekuilibër dinamik, është e nevojshme dhe e mjaftueshme që ato të përfaqësojnë një sistem vektorësh të barabartë me zero.
Kjo mënyrë e paraqitjes së ekuilibrit të forcave të aplikuara në një trup të ngurtë është shumë e përhapur dhe fjala "ekuilibër" përdoret shumë shpesh në këtë kuptim. Sidoqoftë, nuk duhet të harrohet fakti se një ide e tillë e ekuilibrit i referohet më shumë dinamikës sesa statikës.
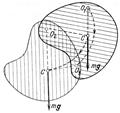
188. Qendra e rëndesës së një trupi të ngurtë.
Reduktimi i forcave të aplikuara në një trup të ngurtë mund të kryhet, veçanërisht, për forcat e peshës së të gjitha pikave materiale nga të cilat përbëhet trupi. Të gjitha këto gllënjka janë forcat paralele, të orientuara njësoj. Prandaj, ky sistem vektorësh reduktohet në një rezultante të barabartë me peshën totale P të trupit të ngurtë dhe zbatohet në qendër të këtyre vektorëve paralelë, të cilët
do të shënojmë G. Kjo pikë, pozicioni i së cilës në trup nuk varet nga orientimi i saj në raport me sipërfaqen e Tokës, është qendra e gravitetit të trupit. Do të shohim në kapitullin tjetër se si mund të përcaktojmë koordinatat e tij. Nga teoremat e mëparshme rrjedh se veprimi i gravitetit në pika të ndryshme të një trupi të ngurtë, si nga pikëpamja statike ashtu edhe dinamike, reduktohet në një forcë të vetme, në peshën totale të aplikuar në qendrën e gravitetit të trupit.
A e dinit, Cili është falsiteti i konceptit të "vakumit fizik"?
vakum fizik - koncepti i relativizmit fizika kuantike, aty kuptohet si gjendja energjetike më e ulët (tokësore) e fushës së kuantizuar, e cila ka momentin zero, momentin këndor dhe të tjera. numrat kuantikë. Teoricienët relativistë e quajnë vakumin fizik një hapësirë krejtësisht pa lëndë, të mbushur me një fushë të pamatshme dhe për rrjedhojë vetëm një fushë imagjinare. Një gjendje e tillë, sipas relativistëve, nuk është një zbrazëti absolute, por një hapësirë e mbushur me disa grimca fantazmë (virtuale). Relativiste teoria kuantike fusha argumenton se, në përputhje me parimin e pasigurisë së Heisenberg-ut, grimcat virtuale lindin dhe zhduken vazhdimisht në vakum fizik, domethënë grimca të dukshme (që i duket kujt?): ndodhin të ashtuquajturat lëkundje të fushave me pikë zero. Grimcat virtuale të vakumit fizik, dhe për rrjedhojë, vetë, sipas përkufizimit, nuk kanë një kornizë referimi, pasi përndryshe parimi i relativitetit të Ajnshtajnit, mbi të cilin bazohet teoria e relativitetit, do të cenohej (d.m.th., një matje absolute do të bëhej i mundur sistemi me referencë nga grimcat e vakumit fizik, i cili, nga ana tjetër, do të hidhte poshtë pa mëdyshje parimin e relativitetit, mbi të cilin është ndërtuar SRT). Kështu, vakuumi fizik dhe grimcat e tij nuk janë elementë të botës fizike, por vetëm elementë të teorisë së relativitetit që ekzistojnë jo në botën reale, por vetëm në formula relativiste, duke shkelur parimin e shkakësisë (ato lindin dhe zhduken pa arsyeja), parimi i objektivitetit (grimcat virtuale mund të konsiderohen, në varësi të dëshirës së teoricienit, ekzistuese ose jo-ekzistente), parimi i matshmërisë aktuale (jo të vëzhgueshme, nuk kanë ISO-në e tyre).
Kur njëri ose tjetri fizikan përdor konceptin e "vakumit fizik", ai ose nuk e kupton absurditetin e këtij termi, ose është dinak, duke qenë një ndjekës i fshehur ose i dukshëm i ideologjisë relativiste.
Është më e lehtë të kuptohet absurditeti i këtij koncepti duke iu referuar origjinës së shfaqjes së tij. Ai lindi nga Paul Dirac në vitet 1930, kur u bë e qartë se mohimi i eterit në formën e tij të pastër, siç bëri një matematikan i madh, por një fizikan mediokër, nuk është më i mundur. Shumë fakte e kundërshtojnë këtë.
Për të mbrojtur relativizmin, Paul Dirac prezantoi konceptin fizik dhe jalogjik të energjisë negative, dhe më pas ekzistencën e një "deti" të dy energjive që kompensojnë njëra-tjetrën në vakum - pozitive dhe negative, si dhe një "det" grimcash që kompensojnë njëra-tjetrën. - elektronet dhe pozitronet virtuale (domethënë të dukshme) në vakum.





