Temel kavramlar ve bağımsız çalışma yapma örneği
bağlantı
Kol mekanizması - bağlantıları yalnızca dönme, öteleme, silindirik ve küresel çiftler oluşturan bir mekanizma. Bir kaldıraç mekanizmasının bir örneği, bir kam-kol mekanizmasıdır - kaldıraç mekanizmalarının kam mekanizmalarıyla bağlantısı olan bir cihaz. Bu tür bağlantılar iki versiyonda yapılır:
1) tutarlı;
2) paralel.
Çoğu durumda, kam kolu mekanizması şu şekilde anlaşılır: paralel bağlantılar. Kam-kol mekanizmaları, hareket sırasında kaldıraç mekanizmalarının bağlantı uzunluklarını değiştirmek ve buna göre belirtilen hareket yasalarını elde etmek ve performansı artırmak için kullanılır. Kol mekanizmaları en yaygın olarak dişli mekanizmaları veya vites kolu mekanizmaları ile birlikte kullanılır. Bu tip mekanizmalar birbirleri ile etkileşim içinde olan dişli ve manivela mekanizmalarını içeren ve bağlantıları seri veya paralel olabilen cihazlardır.
Mühendislik endüstrilerinde çeşitli takım tezgahlarında, makinelerde ve otomatik kontrol sistemlerinde ağırlıklı olarak paralel bağlantılı vites kolu mekanizmaları kullanılmaktadır. Özellikle, sözde Roma dişlisi kullanılır - bir toplama kolundan sürülen bir kaydırıcıya ve birbirine geçen iki dişliden iki bağlantı çubuğuna sahip yedi bağlantılı bir mekanizma. Böyle bir mekanizmada, bir kol ya da bir dişli ya bir tahrik ya da bir köle olabilir. Bir dizi varyanttaki vites kolu mekanizmaları, genellikle, biri kaldıraç mekanizmasının bir bağlantısına bağlı olan iki çift etkileşimli dişli içerir. Genel olarak, vites kolu mekanizmaları, bağlantıların çeşitli hareket yasalarını elde etmeyi, iyileştirmeyi mümkün kılar. güç özellikleri tüm mekanizma. Çoğu durumda, vites kolu mekanizmaları kılavuz ve şanzıman mekanizmaları olarak kullanılır (özellikle Rusya'nın endüstriyel ve ekonomik kompleksinin birçok sektöründe kullanılan otomatik makine hatlarında).
yazar yazarlar ekibiKapaklı mekanizma Kapaklı mekanizma, delikli bir bandın (özellikle film projektörlerindeki veya film kameralarındaki filmler) döngüsel olarak çekilmesi için bir cihazdır. Böyle bir mekanizma, aralıklı tek yönlü hareket gerçekleştirir. Bir kapaklı mekanizma olarak
kitaptan Büyük Ansiklopedi teknoloji yazar yazarlar ekibiDişli mekanizması Karmaşık bir dişli mekanizması, ikiden fazla dişlinin katıldığı dişlilere sahip bir cihazdır. Cihazlar hem bir tür yapısal teknoloji olarak geliştirilebilir hem de sıralı,
Büyük Teknoloji Ansiklopedisi kitabından yazar yazarlar ekibi Büyük Teknoloji Ansiklopedisi kitabından yazar yazarlar ekibiKam mekanizması Kam mekanizması, bir kam içeren bir mekanizmadır. Rusya'nın endüstriyel ve ekonomik kompleksinin çeşitli sektörlerinde, kam mekanizmaları farklı versiyonlarda yaygın olarak kullanılmaktadır.Birinci seçenek: mekanizmada, kamın bir çalışması vardır.
Büyük Teknoloji Ansiklopedisi kitabından yazar yazarlar ekibiSalıncak mekanizması Salıncak mekanizması, bir külbütör içeren bir kaldıraç mekanizmasıdır. Çeşitli makinelerde, takım tezgahları ve diğer ekipmanlar yaygın olarak kullanılmaktadır. Farklı çeşit külbütör mekanizması: 1) külbütör-kaydırıcı mekanizması; 2) krank rocker
Büyük Teknoloji Ansiklopedisi kitabından yazar yazarlar ekibiMekanizma Bir mekanizma, birkaç elemandan (veya bağlantılardan) oluşan ve bir veya daha fazla katı elemanın hareketini bu sistemin diğer elemanlarının gerekli hareketlerine dönüştürmek için tasarlanmış bir sistemdir. Mekanizmalar aşağıdakilerle karakterize edilir: 1) mekanik
Büyük Teknoloji Ansiklopedisi kitabından yazar yazarlar ekibiKaldıraç mekanizması Kaldıraç mekanizması, bağlantıları yalnızca dönme, öteleme, silindirik ve küresel çiftler oluşturan bir mekanizmadır. Bir kaldıraç mekanizmasının bir örneği, bir kam kolu mekanizmasıdır - bir bağlantı olan bir cihaz
Büyük Teknoloji Ansiklopedisi kitabından yazar yazarlar ekibiKatlama mekanizması Katlama mekanizması, bir kağıt yaprağını katlamak için tasarlanmış bir cihazdır ve baskı işlerinde yaygın olarak kullanılır.Bu mekanizma şu şekilde çalışır: besleme silindiri döndüğünde bir yaprak kağıt hareket eder.
Büyük Teknoloji Ansiklopedisi kitabından yazar yazarlar ekibiSürtünme mekanizması Sürtünme mekanizması, birbirine bastırılan elemanlar arasındaki sürtünme kuvvetleri nedeniyle hareket, hızlanma veya frenleme iletiminin gerçekleştirildiği bir cihazdır. Sert elemanlardan oluşan bir sürtünme mekanizmasında (şanzımanda, debriyajda,
6.1. Problemin ifadesi, türleri ve sentez yöntemleri
Genel durumda kaldıraç mekanizmalarının sentezi sorunları, yapısal, kinematik ve dinamik hesaplama aşamalarını içeren optimal tasarımın karmaşık sorunlarıdır. Bu nedenle, çözümü basitleştirmek için, yalnızca bazı (temel) tasarım koşullarının dikkate alındığı belirli problemler göz önünde bulundurulur.
İlk verilere bağlı olarak, aşağıdaki sentez türleri ayırt edilir:
Geometrik, bağlantıların bireysel konumları veya bireysel noktaların yörüngeleri verildiğinde;
Kinematik, belirli hızlar, ivmeler veya bunların oranları verildiğinde;
Dinamik, etki eden kuvvetler verildiğinde veya dinamik parametrelere bazı kısıtlamalar getirildiğinde.
Sentez yöntemleri şunları içerir:
a) deneysel, bağlantıların boyutları belirli bir yörüngeyi uygulamak için deneysel olarak seçildiğinde;
b) grafik;
c) analitik.
Yukarıda listelenen sentez türlerinin ve yöntemlerinin çeşitli kombinasyonları mümkündür.
6.2. Çubuk mekanizmalarının optimal sentezi problemlerini çözme
Optimal sentez problemini belirlerken, girdi ve çıktı parametreleri arasında ayrım yapılmalıdır.
Giriş parametreleri başlangıçta ayarlanmış parametrelerdir (bağlantı boyutları, hızlar, ivmeler veya oranları).
Çıktı parametreleri, problemin çözülmesi sonucunda belirlenen parametrelerdir.
Sentez yaparken, bir kural olarak ana olan ve geri kalanı ikincil (ek) olan kinematik, yapıcı, teknolojik nitelikte vb. Bir dizi gereksinimi dikkate almak gerekir. Ana gereksinim matematiksel olarak bir fonksiyon olarak yazılırsa, burada  - çıktı parametreleri, daha sonra böyle bir işlev çağrılır amaç fonksiyonu(hedef), olarak ifade edilen ek koşullar ise kısıtlamalar olarak adlandırılır.
- çıktı parametreleri, daha sonra böyle bir işlev çağrılır amaç fonksiyonu(hedef), olarak ifade edilen ek koşullar ise kısıtlamalar olarak adlandırılır.
Optimal sentezin görevi, tüm kısıtlamalara tabi olarak aşırı bir Z değeri sağlamaktır.
Örneğin, bir mekanizmanın ağırlığını, parametrelerinin (bağlantı uzunlukları) bir fonksiyonu olarak ifade ederek, varlık koşulları altında Z'yi en aza indirme sorunu çözülebilir. Bu koşullar, mafsallı dört çubuklu bir bağlantıda krank döndürme koşullarını, belirli bir basınç açısını koruma koşulunu ve bir dizi diğerini içerir.
Az sayıda çıktı parametresi ile optimizasyon probleminin çözümü analitik bir biçimde elde edilebilir. Aksi takdirde, optimal çözümler için yönlendirilmiş, rastgele veya birleşik aramanın sayısal yöntemleri kullanılır.
6.3. Dört bağlantılı mafsallı bir bağlantıda krank dönüşü koşulları
P  Dört menteşeli bir mekanizma tasarlanırken (sentezlenirken) dikkate alınması gereken koşullardan biri, baklaların kranklanabilirliği, yani bir veya iki krankın varlığı olabilir. Bağlantıların uzunluklarının oranına bağlıdır. Örneğin, dört bağlantılı bir bağlantının AB bağlantısının (Şekil 37) bir krank haline gelmesi için, sırayla iki uç konumdan geçmesi gerekir. Mekanizmanın üç konumunu kullanarak aşağıdaki koşulları elde ederiz:
Dört menteşeli bir mekanizma tasarlanırken (sentezlenirken) dikkate alınması gereken koşullardan biri, baklaların kranklanabilirliği, yani bir veya iki krankın varlığı olabilir. Bağlantıların uzunluklarının oranına bağlıdır. Örneğin, dört bağlantılı bir bağlantının AB bağlantısının (Şekil 37) bir krank haline gelmesi için, sırayla iki uç konumdan geçmesi gerekir. Mekanizmanın üç konumunu kullanarak aşağıdaki koşulları elde ederiz:
1, 2, 3 konumları için, daha önce bağlantıların uzunluklarını belirtmiş olan:
Burada:
yani, krank ve diğer herhangi bir bağlantının uzunluklarının toplamı, kalan bağlantıların toplamından daha azdır.
İkili olarak elde edilen eşitsizlikleri toplarız ve şunu elde ederiz:


 , yani, krank en kısa bağlantıdır. Ve bu koşullar karşılanmazsa, mekanizma ya iki kranklı ya da iki rocker olacaktır. Bu koşullar geometrik sentezde kullanılır.
, yani, krank en kısa bağlantıdır. Ve bu koşullar karşılanmazsa, mekanizma ya iki kranklı ya da iki rocker olacaktır. Bu koşullar geometrik sentezde kullanılır.
Federal Eğitim Ajansı
Durum Eğitim kurumu yüksek mesleki eğitim
"MATI" - Rus Devleti Teknoloji Üniversitesi K.E.'nin adını taşıyan Tsiolkovski
"Makineler ve Mekanizmalar Mekaniği" Bölümü
KOL MEKANİZMALARININ KUVVET HESAPLAMASI
Mekanizmalar ve makineler teorisi üzerine ders tasarımı için yönergeler
Derleyen: Chufistov V.A. Shuvalova L.S.
Moskova 2006
1. KUVVET HESAPLAMANIN AMAÇLARI VE İÇERİĞİ
Mekanizmaların güç hesaplaması, mekanizmanın her bir bağlantısına uygulanan tüm kuvvetlerin ve kuvvetlerin momentlerinin belirlenmesinden oluşur. Bağlantılara ve kinematik çiftlere etki eden kuvvetlerin büyüklüğü, yönü ve uygulama noktaları, sonraki mukavemet, aşınma direnci, güvenilirlik hesaplamaları ve diğer tasarım mekanizmaları problemlerinin çözümü için bilinmelidir. Mekanizma, bağlantılarına uygulanan tüm dış kuvvetlerin etkisi altında ve bağlantılarının düzensiz hareketinin bir sonucu olarak çalıştığında. kinematik çiftler tepki kuvvetleri ortaya çıkar, yani bağlantılar arasındaki etkileşim kuvvetleri. Kuvvet hesabındaki tepki kuvvetleri, özellikle yatakların seçimi ve hesaplanması için mekanizmanın işlerliğini değerlendirmek ve sağlamak için belirlenir.
Kuvvet hesaplamasının ana görevi, kinematik mekanizma çiftlerindeki tepkiyi belirlemek ve ayrıca dengeleme kuvvetini veya kuvvet çiftini (dengeleme momenti) ve motor gücünü belirlemektir.
Kuvvet hesaplaması, sürtünme kuvvetleri olsun veya olmasın yapılabilir. Çoğu mekanizmada, sürtünmenin üstesinden gelmek için kayıplar küçüktür ve bunları ihmal etmek, hesaplamayı önemli ölçüde basitleştirmeyi ve kısaltmayı mümkün kılar. Kinetostatik hesaplama, kuvvet planları yöntemiyle veya Profesör N.E.'nin yöntemiyle yapılabilir. Zhukovski.
Ders projesinde, mekanizmanın verilen bir pozisyonu için mekanizmanın kinetostatik hesabı her iki şekilde yapılır. Elde edilen sonuçlar karşılaştırılır ve tutarsızlık %5'i geçmemelidir.
2. KUVVET PLANLARI YÖNTEMİNE GÖRE KUVVET HESAPLAMASI
2.1 Genel bilgiler.
Kinetostatik kuvvet hesaplama yöntemi, sisteme etki eden statik yüklere dinamik yükler eklenirse, statik denklemlerin ivme ile hareket eden bir sisteme uygulanabileceği d'Alembert ilkesine dayanır. Statik yükler, G i bağlantılarının ağırlığına, faydalı ve zararlı dirençlere F bağlıdır. Dinamik
yükler kütlelere bağlıdır G g i , bağlantıların eylemsizlik momentleri I si , doğrusal
bağların kütle merkezlerinin ivmeleri a si ve bağların açısal ivmeleri ε i .
Düz bir mekanizmanın herhangi bir bağlantısının dinamik yükü, ağırlık merkezine indirgenir ve genel durumda, ana vektör ve ana atalet kuvvetleri momentinden oluşur. Düzlem-paralel hareket gerçekleştiren veya sabit bir eksen etrafında düzgün olmayan bir şekilde dönen bir bağlantının atalet kuvvetinin modülü aşağıdaki formülle hesaplanır:
burada I si, bağlantının ağırlık merkezine göre atalet momentidir. Moment, M H i → − ε G ben bağlantısının açısal ivmesinin tersi yönde yönlendirilir.
Sürtünme kuvvetlerinin yokluğunda, öteleme kinematik çiftindeki reaksiyonun kılavuzlara dik olduğu varsayılır. kütle merkezi ise
sürgünün çubuk bağlantısına bağlı olduğu menteşe ile çakışıyor, reaksiyon menteşeden geçiyor ve hesaplama görevi reaksiyonun büyüklüğünü bulmak. Kaydırıcının kütle merkezi menteşe ile örtüşmüyorsa, hesaplama görevi reaksiyonun büyüklüğünü ve uygulama noktasını belirlemektir. Dönme kinematik çiftindeki reaksiyon, menteşenin merkezine uygulanır ve hesaplama görevi, büyüklüğünü ve yönünü belirlemektir. Bazen böyle bir reaksiyonun, biri bağlantı boyunca yönlendirilen ve normal bileşen olarak adlandırılan, diğeri ona dik olan ve teğet bileşen olarak adlandırılan iki bileşen şeklinde temsil edilmesi tavsiye edilir. “K” bağlantısına uygulanan reaksiyonu, “i” bağlantısının yanından, Rik ve reaksiyonun bileşenlerinden belirtmek gelenekseldir.
R n ik ve R τ ik.
2.2 İlk veriler
Mekanizma planı.
Açısal dönüş hızı ω .
Krank konumu koordinatı ϕ derece.
S i bağlantılarının kütle merkezlerinin konumları.
Ağırlıklar G i ve bağlantıların eylemsizlik momentleri I si .
Faydalı direnç kuvveti (kesme kuvveti) F .
2.3. Güç hesaplama sırası.
Kinematik çiftlerde sürtünme kuvvetleri hesaba katılmadan aşağıdaki kuvvet hesaplama sırası oluşturulmuştur.
2.3.1. Belirli bir krank pozisyonu için mekanizmanın bir planını çiziyoruz
içinde seçilen ölçekμl.
2.3.2. G i bağlantılarının ağırlıklarını S i kütle merkezlerinde ve faydalı direnç kuvveti F'yi kaydırıcıya uygularız. Tüm kuvvetler aynı uzunlukta (15 - 20 mm) vektörler olarak ölçeksiz olarak gösterilir.
2.3.3 μ a m / (s2 mm) ölçeğinde bir ivme planı oluşturuyoruz. Mekanizma planının ve ivme planının ilk sayfadan aktarılması tavsiye edilir. Benzerlik kuralını kullanarak, ivme planında bağlantıların kütle merkezlerinin ivmelerini temsil eden vektörleri ve formülle buluruz.
bir si | = πS ben μa ( | ||||
ivmelerin büyüklüklerini kendileri hesaplıyoruz. Formül (1)'e göre, bağlantıların atalet kuvvetlerini belirleriz, bunları bağlantıların kütle merkezlerine uygularız, onları a si vektörüne zıt yönde yönlendiririz.
Karşılık gelen bağlantılar için açısal ivmelerin büyüklüklerini ve yönlerini buluyoruz:
ei= | bir ti | |||
formül (2)'ye göre - aynı bağlantılar için atalet kuvvetlerinin momentleri ve dairesel bir ok şeklinde bunları bağlantılara uygularız. Bu durumda, atalet kuvvetlerinin momentinin, bağlantının açısal ivmesinin tersi yönde yönlendirildiği unutulmamalıdır.
(böylece 2 ε 4 = 0 ve M 4 = 0 mekanizması için). Şek. 1a mekanizmanın planı inşa edildi
Şekil 1'de bağlantılarına uygulanan statik ve dinamik yüklerle birlikte. 1b onun hızlandırma planıdır. Buna göre, mekanizma 2 için, mekanizmanın planı ve ivme planı Şekil 2'de çizilir. 2a,b, mekanizma 3 için - şek. 3a,b ve mekanizma 4 için - şek. 4a,b




2.3.4. 4 ve 5 numaralı bağlantılardan oluşan yapısal bir grubu mekanizmadan ayırıyoruz. 1,3 ve 4 numaralı mekanizmalar için bu, belirli bir modifikasyonun ikili 2'sidir (Şekil 5a, 7a). Mekanizma 1 ve 4'te, kaydırıcı 5 yatay bir kılavuz boyunca hareket eder ve kütle merkezi S5, menteşe E ile çakışmaz. Mekanizma 3'te
kaydırıcı 5 dikey bir kılavuz boyunca hareket eder ve kütle merkezi S 5
menteşe E ile çakışır. Atılan bağlantıların yanından reaksiyonlar uygulanırsa Dyad 4-5 dengede olacaktır - rafın 6 tarafından kaydırıcıya 5 reaksiyonu ve sahne arkasından 3'e reaksiyon R 34 bağlantı çubuğu 4. Reaksiyon
teğetsel bileşen R τ 34 | bağlantıya dik 4. |
||||||
Reaksiyonun büyüklüğü ve yönü | R τ34 | bir denklem yapıp yapmadığımızı belirle |
|||||
E menteşesine göre bağlantı 4'e uygulanan tüm kuvvetlerin toplamı: |
|||||||
Σ Μ (4 yıldız) = Ο → R τ 34 ; | |||||||
h + G h- | M 4 − R τ | DE = 0 . | |||||
R τ = U 4 sa 1 + G 4 sa 2 − M 4 | μl. | ||||||
Denklem (7)'de kuvvetler N olarak, kuvvetlerin kolları mm olarak, eylemsizlik momenti Μ 4 Nm olarak, dyad planının ölçeği -μl m/mm olarak değiştirilir. Cevap olumsuz ise, Rτ 34 reaksiyonunun yönü tersine çevrilmelidir.
Reaksiyonlar Rn 34 ve R65 şuradan bulunabilir: vektör denklemi 4-5 çiftine uygulanan kuvvetlerin toplamı.
RG τ | +(FG +U | )+R | ||||||||
Daha düşük kinematik çiftlere sahip kol mekanizmaları, modern makine mühendisliğinde yaygın olarak kullanılmaktadır. Bu tür mekanizmaların avantajları şunları içerir: yüksek üretilebilirlik, kinematik bağlantılarda rulmanlı yatak kullanma olasılığı, temas yüzeylerinde az aşınma ile büyük kuvvetleri aktarma olasılığı, çalışma sırasında güvenilirlik ve dayanıklılık. Bu mekanizmalar, kam mekanizmalarından farklı olarak kinematik çiftlerin sürekli kapanmasını sağlayan cihazlar gerektirmez.
Mekanizmalar, teknolojik sürecin gereksinimlerini karşılama koşullarından yaratılır. Mekanizmaların tasarımı, çözümü iki aşamaya ayrılabilen karmaşık bir iştir. İlk aşama Mekanizmaların sentezi, çıkış bağlantısının gerekli biçimini ve hareket yasasını ve mekanizmaların çalışabilirliği için genel koşulları sağlayan bir kinematik şemanın seçilmesinden oluşur. İçinde ikinci sahne mekanizmanın sağlamlığını ve güvenilirliğini sağlamak için yapıcı bağlantı biçimleri ve kinematik çiftler geliştirilmiştir. Kursumuz sadece ilk aşama sentez.
Mekanizmanın şeması, kural olarak, bu özel koşullarla ilgili olarak deneyim temelinde seçilir. Sonra belirle sentez parametreleri, yani gerekli yörüngeleri vb. sağlayan noktaların bağlantı uzunlukları ve koordinatları ve ayrıca ek sentez koşulları.
Ek sentez koşulları şunları içerir: krank varlığı koşulu, birlikte transfer koşulu.
Zorla aktarım koşulu
Makinelerde kuvvet transferinin kalitesini, bağlantıların yerçekimi kuvvetleri ve atalet kuvvetleri dikkate alınmadan belirlenen basınç açısı λ ile karakterize etmek gelenekseldir.
basınç açısı λ hareketli bağlantının yanındaki tarafından sürülen bağlantıya etki eden kuvvetin vektörü ile bu kuvvetin uygulama noktasının mutlak hızının vektörü arasındaki dar açı.
Hareket İletim Açısı γ 90°'ye kadar basınç açısını tamamlar:
γ = 90° - λ .
Metrik sentez aşamasında, izin verilen maksimum basınç açıları [λ max ] ve hareket iletimi [γ min ], kural olarak, bunları alarak sınırlıdır:
Lineer tahrikli bir bağlantı için [λ max ] ≤ 30° ve [γ min ] ≥ 60° ve
Dönen tahrikli bir bakla için [λ max ] ≤ 40°...45° ve [γ min ] ≥ 50°...45°.
Sürüş anlarının etkisi altında dengede olan menteşeli bir dört bağlantıda kuvvetlerin aktarılması koşulunu düşünün. M D ve direnç anı M C (Şekil 3.1). Basınç açısı λ, faydalı sürükleme kuvveti arasındaki oranı karakterize eder. F 23 cos λ direnç momentinin üstesinden geliyor M ile ve kuvvet F 23 eşittir
F 23 = MİTİBAREN /( ben Güneşçünkü λ).
Şekil 3.1. Menteşeli dört çubukta basınç açısı λ
Basınç açısı arttıkça daha fazla kuvvet uygulanmalıdır. F 23 Aynı direniş anının üstesinden gelmek için. Bu, kinematik çiftlerdeki reaksiyonlarda bir artışa ve mekanizmanın verimliliğinde bir azalmaya yol açar.
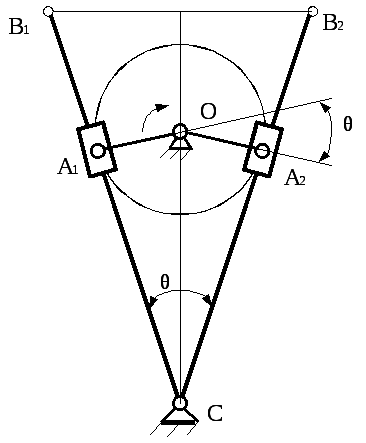
Mekanizma hareket ettikçe basınç açısı değişir. Menteşeli dört bağlantıdaki bu açı, krank açıldığında pozisyonlarda aşırı değerlere ulaşır. AE raf ile aynı hatta bulunur işletim sistemi(Şekil 3.2).

Şekil 3.2. Basınç açılarının ulaştığı mekanizmanın pozisyonları
uç değerler
Krank-kaydırıcı mekanizmasında, basınç açısı, Şekil l'de belirtilen konumlarda aşırı değerler alır. 3.3 krank ne zaman AE kaydırıcının yörüngesine dik AT.

Pirinç. 3.3. Basıncın açı yaptığı mekanizmanın pozisyonları
aşırı değerlere sahiptir.
Ders projelerinde en sık karşılaşılan mekanizmaların kinematik sentezinin görevleri aşağıda ele alınmıştır.
Değişim katsayısı ile menteşeli dört bağlantının sentezi ortalama sürat ve külbütör kolunun iki uç konumu
katsayı k sürülen bağlantının ortalama hızındaki değişiklikler eşittir k = V C 2 – 1 / V C 1 – 2 ,
nerede V C 1 – 2 − nokta ortalama hat hızı İTİBAREN(Şekil 3.4) çalışma stroku sırasında, V C 2 – 1 − tersi için aynı.
Kabul k> 1, çünkü mekanizmalar tasarlanırken, kural olarak, başlangıç konumuna dönüş süresi, çalışma strok süresinden daha az alınır, bu nedenle k > 1.
bunu kanıtlamak kolay k= (180° + θ) /(180° - θ).
Nereden θ = 180° ( k −1) /(k +1),
nerede − biyel konumları arasındaki açı M.Ö iş akışının başında ve sonunda.
Notasyonu tanıtalım:
ben 1 - krank uzunluğu AB,(bkz. şekil 3.4); ben 2 - biyel uzunluğu Güneş;
ben 3 - rocker'ın uzunluğu CD; ben 4 - destekler arasındaki mesafe (raf uzunluğu ANCAKD).

Pirinç. 3.4. Verilen açıların değerlerine karşılık gelen konumlarda mekanizmanın şeması ψ
ψ 1 ve ψ 2 açılarının yanı sıra katsayı verildiğinde k, rocker'ın iki uç konumunu tasvir edin CD(Şekil 3.5).
puan İTİBAREN 1 ve İTİBAREN 2 düz bir çizgi ile bağlayın. Bağlantı çubuğunun uç konumları arasındaki q açısını hesaplayın Güneş. Noktada İTİBAREN 2 bir açı oluşturun γ = 90° −
θ ve noktadan İTİBAREN 1 çizgiye dik olarak alçaltın İTİBAREN 1 İTİBAREN 2 noktasından çizilen çizgi ile kesişme noktasına İTİBAREN 2 ve γ açısının oluşturulması. Bu çizgilerin kesişme noktasını belirtiyoruz Ö. Açıkçası, bir dik üçgende ÖİTİBAREN 1 İTİBAREN 2 köşe İTİBAREN 1 işletim sistemi 2 = θ. Üç nokta O, İTİBAREN 1 ve İTİBAREN 2 bir daireyi tanımlayın. Bir noktada tepe noktası olan yazılı açı Ö ark üzerine eğilir  ve θ açısına ve aynı yaya dayalı tüm yazılı açılara eşittir. Bir noktada ortalanmış bir daire seçiyoruz Ö keyfi nokta ANCAK ve noktalarla düz segmentlerle bağlayın İTİBAREN 1 ve İTİBAREN 2. Sonuç olarak, krank desteğini noktaya yerleştirerek ANCAK, uç konumlarda dört bağlantı mekanizmasının bir diyagramını elde ederiz (bkz. Şekil 3.5).
ve θ açısına ve aynı yaya dayalı tüm yazılı açılara eşittir. Bir noktada ortalanmış bir daire seçiyoruz Ö keyfi nokta ANCAK ve noktalarla düz segmentlerle bağlayın İTİBAREN 1 ve İTİBAREN 2. Sonuç olarak, krank desteğini noktaya yerleştirerek ANCAK, uç konumlarda dört bağlantı mekanizmasının bir diyagramını elde ederiz (bkz. Şekil 3.5).

Pirinç. 3.5. Katsayı k ile menteşeli dört bağlantının sentezi
ortalama hızdaki değişiklikler ve rocker'ın iki aşırı konumu
Şekilden takip ediyor AC 1 = AT 1 İTİBAREN 1 -AB 1 = ben 2 − ben 1 ; AC 2 = AT 2 İTİBAREN 2 -AB 2 = ben 2 + ben 1 .
Neresi ben 1 = 0,5 (AC 2 −AC 1) μ ben / 2; ben 2 = AC 2 − ben 1 .
Stand uzunluğu ANCAKD = ben 4 noktanın konumuna göre belirlenecektir ANCAK.
Noktanın konumundan beri ANCAK keyfi olarak seçilmişse, sorunun çözümünün bir çok değişkeni vardır. Bu, ek koşullar, örneğin kuvvetlerin aktarılması koşulu, desteklerin konumunun koordinat eksenine göre eksantrikliğinin varlığı veya yokluğu gibi ek koşullar girmenize olanak tanır.
Salıncak mekanizmasının sentezine göre katsayık değişiklikler
orta hızda sahne arkası
Verilen: katsayı k hareket hızındaki değişiklikler ve noktanın iki uç konumu AT kulis Güneş.
Salıncak mekanizmasını iki uç konumda düşünün (Şekil 3.6).
Pirinç. 3.6. Salıncak mekanizmasının sentezi
Krank konumu arasındaki açı AE 2 ve krank pozisyonunun devamı AE 1 eşittir θ = 180° ( k −1) /(k+1). köşeler AT 1 M B 2 ve q birbirine dik kenarları olan açılar gibi birbirine eşit olacaktır.
düz bir çizgide AT 1 AT 2 tepe noktasında açılı bir ikizkenar üçgen oluşturuyoruz İTİBAREN q açısına eşittir. q açısını keyfi bir noktada ikiye bölen düz çizgi üzerinde, bir nokta seçin Ö krankın etrafında döndüğü AE. noktadan düşme Ö bir çizgiye dik AT 1 İTİBAREN(veya AT 2 İTİBAREN), krank uzunluğunu bulun AE. Ortaya çıkan külbütör mekanizması verilen koşulları karşılayacaktır. Verilen şartlara göre külbütör mekanizmasının yapımı aşağıdaki gibidir. puan AT 1 ve AT 2 , konumu verilen, düz bir çizgi ile bağlanacağız.
Bir krank kaydırma mekanizmasının sentezi
Aşağıdaki sözleşmeleri kabul ediyoruz (Şekil 3.7):

Pirinç. 3.7. Krank kaydırıcı mekanizmasının şeması
r- krank uzunluğu AE;H- kaydırıcı vuruşu; ben- biyel uzunluğu AB;
e– eksensiz, yani nokta yolu ofseti AT eksen hakkında kaydırıcı ey ;
L = ben/ r- biyel kolunun nispi uzunluğu;
ν = e/r– göreceli eksensiz;
h = H/ r- kaydırıcının göreceli vuruşu ;
λmax maksimum basınç açısıdır (bkz. Şekil 3.3);
k − kaydırıcının ortalama hızındaki değişim katsayısı (bkz. § 3.1)
ψ 1 ve ψ 2 – keskin köşeler krank tarafından oluşturulan AE yön ile ey kaydırıcının uç konumlarında: φ 1 =  AT 1
ey, φ 2 = AT 2
ey
;
AT 1
ey, φ 2 = AT 2
ey
;
θ \u003d ψ 2 - ψ 1 - sürgünün aşırı konumlarındaki bağlantı çubukları arasında dar bir açı.
Görev 1. Verilen: Değil, L = ben/ r.
Bulmak: r; ben; ׀λ maks ׀.
krank uzunluğu AE: r = H / h. Bağlantı çubuğu uzunluğu AB: ben = L r.
Basınç açısının en büyük değeri ׀ λ max ׀ = ark sin [(1 + ν) / L] .
Görev 2. Verilen: H,k, L= ben/ r.
Bulmak: r; ben; e; ׀ λ maks ׀.
Kaydırıcının aşırı konumlarında bağlantı çubukları arasındaki dar açı
θ = 180 0 ∙( k–1)/(k+1).
Kaydırıcının göreceli vuruşunu ifadeden buluyoruz
h = {2∙} 0,5 .
Göreceli eksensizi ifadeden buluyoruz
ν = [( h –2)∙(L 2 –1)] 0,5 .
krank uzunluğu r = H/ h; biyel uzunluğu ben = L r; eksensiz e =ν r.
Basınç açısının en büyük değeri λ max = ark sin [(1 + ν) / L].





