TSU eğitim portalı. Petrol ve gazın büyük ansiklopedisi
Sayfa 1
Mekanizmanın hareketlilik derecesi üçtür. Bu arada, sahnenin hareketi zorlanır ve iki ekstra hareketlilik derecesi, sahnenin ve taşın ortak eksen etrafında bağımsız olarak dönme yeteneğini karakterize eder ve sahne noktalarının ve ekseninin hareket yasalarını etkilemez. .
Mekanizmanın hareketlilik derecesi veya serbestlik derecelerinin sayısı, tahrik edilen bağlantıların hareketinin kesinliği için gerekli olan önde gelen bağlantılarının sayısına karşılık gelir. Örneğin, mekanizmanın bir hareketlilik derecesi varsa, bu mekanizmanın bir öncü bağlantısı olmalıdır. Hareketlilik derecesi üçe (w 3) eşitse, mekanizmanın verilen hareket yasalarıyla üç bağlantısı olmalıdır.
Mekanizmanın hareketlilik derecesi, hareket yasaları verilen öncü bağlantıların sayısı ile belirlenir.
Bir mekanizmanın hareketlilik derecesi, tüm hareketli bağlantılarının konumunu belirlemek için ayarlanması gereken bağımsız parametrelerin sayısıdır.
| Konkoidograf mekanizması. a önde gelen bağlantı ilk, b önde gelen bağlantıdır. |
Mekanizmanın hareketlilik derecesi Chebyshev formülü ile belirlenir.
Mekanizmanın beklenen hareketlilik derecesi / 2 ise, iki parametrenin değerlerini ayarlamak ve kalan parametrelerin değerlerini denklem sisteminden (1.4) belirlemek gerekir. İki parametrenin tüm sabit değerleri için, denklem sisteminden (1.4) hesaplanan kalan parametreler benzersiz bir şekilde belirlenirse, hareketlilik derecesi f 2'dir. (1.4) denklem sisteminin çözümü, kural olarak, yalnızca bir bilgisayar kullanılarak sayısal olarak gerçekleştirilebilir.
Ancak bu durumda, mekanizmanın hareketlilik derecesi sıfıra eşit olacaktır.
Bu formüllerde w, mekanizmanın hareketlilik derecesidir, n, hareketli bağlantıların sayısıdır, p5 p4 p3, Pr PI, karşılık gelen sınıfların kinematik çiftlerinin sayısıdır. Kinematik zincirlerin üç çeşidi. a ikinci sınıftan iki Assur grubu, b üçüncü sınıftan bir grup, c dördüncü sınıftan bir grup.| Helikopter eğik plaka mekanizması. Assur gruplarına bölünme örneği.
Mekanizmanın hareketlilik derecesi hesaplanırken pasif bağlar oluşturan ve ekstra serbestlik dereceleri getiren bağlantılar dikkate alınmamalıdır.
Manipülatörün serbestlik derecesi sayısında altının üzerinde bir artış, ona sabit bir çalışma gövdesine sahip mekanizmanın serbestlik derecesi sayısı olarak anlaşılan değerli bir manevra kabiliyeti özelliği verir.
S3 (φ) ve s2 (φ) işlevleri tek değerlidir (s3 ve s2'nin tek değerleri sabit bir φ değerine karşılık gelir), bu nedenle mekanizmanın hareketlilik derecesi gerçekten bire eşittir.
Kinematik zincirler, baklaların bağıl hareketinin doğasına göre düz ve uzaysal olarak ayrılır. Bir kinematik zincir, bağlantılarının noktaları paralel düzlemlerde uzanan yörüngeleri tanımlıyorsa düz olarak adlandırılır. Bir kinematik zincir, bağlantılarının noktaları düzlemsel olmayan yörüngeleri veya kesişen düzlemlerde uzanan yörüngeleri tanımlıyorsa uzaysal olarak adlandırılır.
Kinematik zincirlere dahil edilen bağlantıların türüne göre, ikincisi basit ve karmaşık olarak ayrılır.
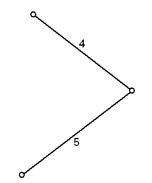
Basit bir zincir, her bir bağlantının en fazla iki kinematik çifte dahil edildiği bir zincirdir (Şekil 2).
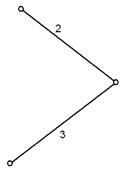
Karmaşık bir kinematik zincir, ikiden fazla kinematik çiftte en az bir bağlantının bulunduğu bir zincirdir (Şekil 3).
Şekil.2 Şekil.3
Bir kinematik zincir, her bir bağlantısı iki veya daha fazla kinematik çifte dahil olan kapalı zincir olarak adlandırılır.
Açık kinematik zincir, sadece bir kinematik çiftte bağlantıların bulunduğu bir kinematik zincirdir.
Eşit sayıda hareketli bakla ile kapalı zincirler açık zincirlere göre daha az serbestlik derecesine sahiptir. Kapalı devreler, çalışan makinelerin, takım tezgahlarının, otomatik makinelerin vb. kinematik devrelerinde, açık devrelerin - manipülatörlerin ve robotların devrelerinde yaygın olarak kullanılmaktadır.
Makinelerde, genellikle bağlantılardan birinin hareketsiz olduğu bu tür kinematik zincirler kullanılır, yani. bir duruştur. Örneğin, motorda içten yanma krank, biyel, piston ve silindir, sabit bağlantının (raf) motor çerçeveli bir silindir olduğu bir kinematik zincir oluşturur (Şekil 4 a, b).
Etkilenen mekanizmadaki bağlantı dış güçler onu harekete geçirene lider denir. Yararlı dirençlerin uygulandığı, üstesinden gelmek adına mekanizmanın inşa edildiği bağlantıya tahrikli bağlantı denir.

Şekil 4 a Şekil 4 b
Mekanizmanın kinematiğini incelerken, bağlantılardan birinin hareketi verilmiş olarak kabul edilir. Giriş denir. Girişin hareketine bağlı olarak hareketini belirlemek istedikleri bağlantıya çıkış denir. Örneğimizde, kaydırıcı çıkış bağlantısı, krank ise giriş bağlantısıdır.
> Düz bir kinematik zincirin hareketlilik derecesi
kinematik buhar zinciri düz mekanizma
Her biri serbest gövde düzlem-paralel hareket sırasında, üç serbestlik derecesine sahiptir, bu nedenle, K-bağlarını kinematik çiftlere bağlamadan önce hepsinin ZK serbestlik dereceleri vardı.
Bağlantıları kinematik çiftlere bağlarken, ikincisi onlardan belirli sayıda serbestlik derecesi alır: düz mekanizmalardaki V. sınıfının çiftleri iki serbestlik derecesi (üçten) alır ve bir tane bırakır; sınıf IV çiftleri bir serbestlik derecesi alarak iki serbestlik bırakır.
Böylece, düz bir kinematik zincir aşağıdaki serbestliğe sahip olacaktır:
H = 3K - 2p1 - p2
Kinematik zincirin bir halkası sabitlenirse, serbestlik derecesi sayısı üç tane daha azalacak ve sabit bağlantıya göre şuna eşit olacaktır:
W = H - 3 veya W=3(k-1) - 2p1 - p2
k - 1 \u003d n (hareketli bağlantı sayısı) ifade edilerek, sonunda şunu elde ederiz:
W = 3n - 2p1 - p2
n, kinematik zincirin hareketli bağlantılarının sayısıdır;
p1 - daha yüksek çiftlerin sayısı (bir bağlantı koşuluyla örtüşen);
p2, kinematik zincirdeki alt çiftlerin sayısıdır (her biri iki bağlantı koşulu gerektirir).
Böylece motorun kinematik zincirinde 3 hareketli halka, 3 çift dönüş ve 1 öteleme çifti olmak üzere toplam 4 alt çift bulunur. Yani onun için
W = 3 3 - 2 4 =1
Kinematik zincirin sabit bağlantı W'ye göre serbestlik derecesi sayısı, kinematik zincirin hareketlilik derecesi olarak adlandırılır.
Kinematik zincirin hareketlilik derecesini belirleme formülü ilk olarak 1869'da ünlü Rus bilim adamı P.L. Chebyshev tarafından elde edildi ve adını taşıyor. Bu formül sadece düzlemsel kinematik zincirler için uygundur.
Bu sayıların çeşitli kombinasyonları verildiğinde, gruplar elde edilebilir. farklı tür. Bu şekilde elde edilen tüm gruplar sınıflara ayrılabilir.
Düz mekanizmaların yapısal sınıflandırmasını düşünün.
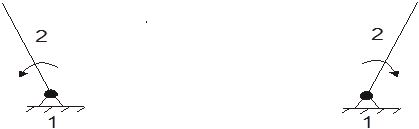
Koşullu olarak, bir sınıf I mekanizması olan bir sınıf V kinematik çifti oluşturan ana bağlantıyı ve rafı arayalım (Şekil 5).
Herhangi bir düzlemsel mekanizmanın oluşumu, W = 0 koşulunu sağlayan bağlantı gruplarının ilk mekanizmaya sıralı bir eki olarak temsil edilebilir.
lider bağlantı lider bağlantı
Örneğin, ilk grup (Şekil 6.a) bir sınıf I mekanizmasına (önde gelen bağlantı ve raf), bir sonraki grup - ya ilk grubun bağlantılarına veya kısmen birinci grubun bağlantılarına ve önde gelen bağlantıya veya rafa vb.
Birkaç grubun bir sınıf I mekanizmaya bağlanmasıyla oluşan mekanizmalar, mekanizmanın kendisi gibi, bire eşit bir hareketlilik derecesine sahiptir, çünkü gruplar bağlı oldukları mekanizmanın hareketlilik derecesini değiştirmezler.
Mekanizmalar, grupların aynı anda birkaç sınıf I mekanizmaya katılmasıyla da oluşturulabilir (Şekil 6.b). Bu durumlarda, elde edilen mekanizmaların hareketlilik derecesi, bu tür grupların bağlı olduğu sınıf I mekanizmaların sayısına eşit olacaktır, yani. ortaya çıkan mekanizmanın önde gelen bağlantılarının sayısı.
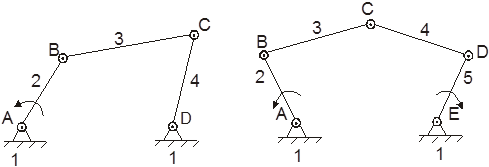
a) 2 - önde gelen bağlantı b) 2 ve 5 - önde gelen bağlantılar
İki bağlantı ve üç çift sınıf V içeren bir bağlantı grubuna (Şekil 7) ikinci dereceden sınıf II grubu veya iki uçlu Assur grubu denir. (Bu grup ana mekanizmaya iki tasma BC ve CD ile bağlanır).
Grubun sırası, grubun ana mekanizmaya bağlı olduğu eleman sayısına göre belirlenir.
İkinciden daha yüksek olmayan sınıf gruplarını içeren mekanizmalara sınıf II mekanizmalar denir.
Sonraki tüm grup II sınıfı türleri, tek tek dönme çiftlerini öteleme çiftleriyle değiştirerek elde edilebilir.
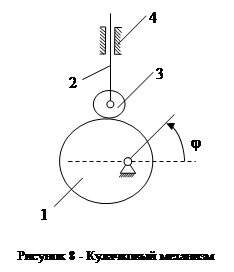
İkinci tip, aşırı rotasyonel çiftlerden birinin bir translasyon çifti ile değiştirildiği tiptir (Şekil 8).
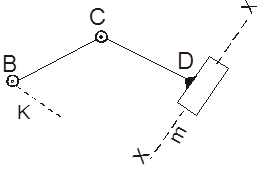
Üçüncü tip - öteleme çifti, orta dönme çifti ile değiştirilir (Şekil 9).
Dördüncü görünüm - iki aşırı dönme çifti, iki öteleme çifti ile değiştirilir (Şekil 10).

Beşinci tip - öteleme çiftleri, aşırı ve orta dönme çiftleri ile değiştirilir (Şekil 11).
Böylece, dönme, öteleme ve daha yüksek sınıf IV ve V çiftleri olan düz mekanizmalarda, beş sınıf II grubu vardır. Teknolojide kullanılan modern mekanizmaların çoğu, sınıf II mekanizmalara aittir.
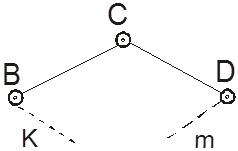
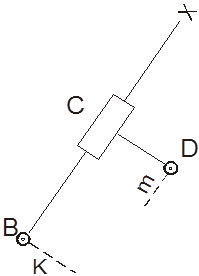
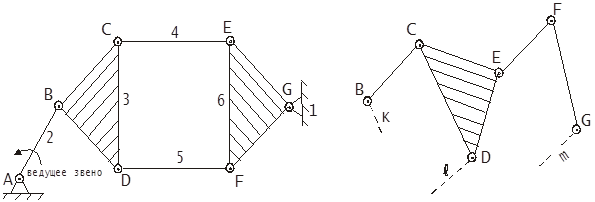
Şimdi bağlantıların ve kinematik çiftlerin sayısının ikinci olası kombinasyonunu ele alalım. Bağlantı sayısı açısından bir sonraki grup, dört bağlantı ve altı çift V sınıfı içermelidir (Şekil 12). Bu kombinasyon için, oluşum ilkeleri farklı olan üç tip kinematik zincir elde edilebilir.
Birinci kinematik zincir daha karmaşık bir açık kinematik zincirdir ve üçüncü dereceden bir sınıf III grubudur ve üç uçlu grup olarak adlandırılır.
EFC bağlantısı temel bağlantıdır.
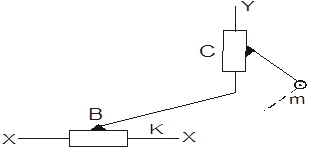
Üçüncü dereceden sınıf III gruplarından daha yüksek olmayan grupları içeren mekanizmalara sınıf III mekanizmalar denir (Şekil 13).
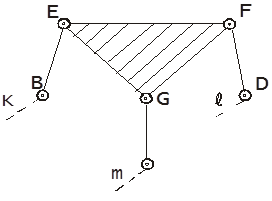
İkinci kinematik zincir, ana mekanizmanın "k" ve "m" bağlantılarına tasma elemanları tarafından değil, temel bağlantılara ait serbest B ve G elemanları ile bağlanan kapalı bir kinematik zincirdir (Şekil 14). ).
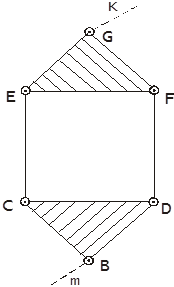
Bu grup, iki rijit kapalı döngü oluşturan iki temel ünite BCD ve EGF'ye ek olarak, bir adet hareketli dört taraflı kapalı döngü CEFD'ye sahiptir (Şekil 15).
Hareketli dört taraflı kapalı devreleri içeren gruplar, sınıf IV grupları olarak sınıflandırılır.
Üçüncü tip kinematik zincir: bu zincir, iki basit sınıf II - BCD ve EFG grubuna ayrılır ve bu nedenle daha önce düşünülenlere aittir ve temelde yeni bir şeyi temsil etmez (Şekil 16).
Pirinç. 1.15 Şekil 1.16
Bu nedenle, sınıf II grubu tek taraflı bir devre, sınıf III grubu - üç taraflı bir kapalı devre, sınıf IV grubu - kapalı bir dört taraflı devre içerir. Tüm dikkate alınan gruplar, konturların yapısındaki karşılık gelen değişikliklerle elde edilir.
genelleştirilmiş koordinat mekanik sistem(mekanizma), sistemin uzaydaki konumunu benzersiz bir şekilde belirleyen bağımsız bir koordinat olarak adlandırılır.
Genelleştirilmiş koordinatların sayısı, sistemin serbestlik derecesi sayısını belirler.
Bedava sağlam(link) uzayda 6 serbestlik derecesine sahiptir, yani. 3 bağımsız yapabilir öteleme hareketleri karşılıklı olarak dik eksenler boyunca ve aynı eksenler etrafında 3 dönme hareketi.
Bağlantı kinematik çifte dahil edilmişse, bağıl hareketi, yani. bu çiftte yer alan ikinci halka ile ilgili harekete belirli kısıtlamalar getirilir. Bu kısıtlamalara bağlantı koşulları denir - S.
Bağlantıların göreceli hareketlerine dayatılan bağlantı koşullarının sayısına göre, çiftler sınıflara ayrılır.
Kinematik bir çiftin sınıfı, bu çiftte yer alan bağlantıların bağıl hareketine dayatılan bağlantı koşullarının sayısına karşılık gelir.
Bağlantıları bir kinematik çifte bağlama yöntemine bağlı olarak, bağlantı koşullarının sayısı 1 ila 5 arasında değişebilir.
Bu nedenle, tüm kinematik çiftler 5 sınıfa ayrılabilir.
Sınıf I, bağlantıların göreli hareketine bir koşul uygulayan çiftleri içerir (5 hareketli çift).
Sınıf II, iki koşul (4-hareketli) vb. empoze eden çiftleri içerir.
Bir bağlantının uzaydaki hareketine herhangi bir bağlantı koşulu getirilmezse, 6 serbestlik derecesine sahiptir.
Kinetik zincirdeki bağlantı sayısı K ise, toplam sayısı K bağlantılarının kinetik zincire bağlanmadan önce sahip oldukları serbestlik derecesi - 6 K
(serbestlik derecesi) kinematik zincire bağlanmadan önce.
Bir kinematik zincirdeki bağlantıların bağlantısı, çiftlerin sınıfına bağlı olarak bağlantıların göreli hareketine farklı sayıda bağ yükler.
o zaman bağlantıların kinematik çiftlere girmeden önce sahip oldukları 6k serbestlik derecesinden, bağlantıların kinematik çiftlere girişiyle alınan bu serbestlik derecelerini hariç tutmak gerekir.
O zaman kinematik zincirin sahip olduğu H serbestlik derecesi sayısı şuna eşit olacaktır:
Kinematik zincirin rafa göre serbestlik derecelerinin W sayısına, kinematik zincirin hareketsizlik derecelerinin sayısı (hareketsizlik derecesi) denir.
(1)'in (2)'ye değiştirilmesi:
() 'yi n ile gösterirsek, şunu elde ederiz:
burada n, kinematik zincirin hareketli bağlantılarının sayısıdır.
Bu eşitliğe hareketlilik formülü veya Somov-Malyshev formülü denir.
|
|
| a) kinematik zincir |

W mekanizmasının hareketlilik derecesi, bir çıktı elde etmek için mekanizmaya getirilmesi gereken bağımsız hareketlerin sayısıdır veya bunun tersi de geçerlidir.
Düz mekanizmalar için formül uygulanır Chebyshev:
W \u003d 3n - 2p 1 - p 2,(2.1)
nerede n- mekanizmanın hareketli parçalarının sayısı;
p1- tek hareketli kinematik çiftlerin sayısı;
p2- iki hareketli kinematik çift sayısı.
Mekansal mekanizmalarda, hareketlilik derecesi formülle belirlenir. Somova-Malysheva:
W \u003d 6n - 5p 1 - 4p 2 - 3p 3 - 2p 4 - p 5,(2.2)
nerede p 3- üç hareketli kinematik çift sayısı;
p 4- dört hareketli kinematik çift sayısı;
p 5- beş hareketli kinematik çiftin sayısı.
Çoğu mekanizma bir dereceye kadar hareketliliğe sahiptir. W=1. Onlara rasyonel denir. Bu mekanizmalar montaj, imalat ve deformasyon hatalarına karşı hassas değildir. Bu tür mekanizmalar çalıştırma gerektirmez.
Diferansiyel dişliler için W=2, robotlar ve manipülatörler için W=4-8, ekskavatörün ana mekanizmasında W=4. Eğer bir W=0, sonra sabit bir yapı elde ederiz - bir çiftlik.
Mekanizmaların oluşumunun yapısal ilkesi. Asur grupları
Mekanizmaların oluşumunun temel ilkesi ilk olarak 1916'da St. Petersburg Politeknik Enstitüsü'nde profesör olan Rus bilim adamı Leonid Vladimirovich Assur tarafından formüle edildi.
L.V. Assura'nın fikrine göre, herhangi bir mekanizma, hareketlilik derecesinin şartını karşılayan önde gelen bağlantılara ve kinematik zincirlerin rafına seri bağlantı ile oluşturulur. W=0.
Bir raflı tek hareketli kinematik çiftte yer alan önde gelen bağlantı, ilk mekanizmayı oluşturur.(Şekil 2.1 a, b).
Öndeki bağlantı, bir krank veya kaydırıcı olabilir. İlk mekanizmaya 1 sınıf atanmıştır. Başlangıç mekanizmasının hareketlilik derecesi W=1.
 Hareketlilik derecesinin W=0 olduğu kinematik zincirlere Assur grupları denir.
Hareketlilik derecesinin W=0 olduğu kinematik zincirlere Assur grupları denir.
|
|||||
|
|||||
|
|||||
İlk Assura Grubu Assura Grubu Mekanizması
mekanizma II sınıf II sınıf
Yukarıdaki tanımları kullanarak, başlangıç mekanizmasına Assur grupları eklenerek herhangi bir mekanizmanın oluştuğunu söyleyebiliriz.
Assur gruplarının türleri II sınıfı
Yalnızca tek hareketli kinematik çiftleri içeren kinematik zincirleri düşünün.
Asura grubu için
![]() veya (2.3)
veya (2.3)
Kinematik çiftlerin sayısı tamsayı olması gerektiğinden Assur grubundaki bağların sayısı ancak çift sayı olabilir. Bu nedenle eşitlik (2.1) aşağıdaki sayı dizileriyle sağlanabilir:
n(hareketli parça sayısı) 2 4 6
p1(tek hareketli çift sayısı) 3 6 9
Assur grubu sınıf II III IV, vb.
Sınıf II Asura grubu şunları içerebilir: 2 hareketli bağlantı ve 3 kinematik çift bağlantıları rafa veya diğer bağlantılara takmak için gerekli olan . Dönme kinematik çiftini belirtirsek AT ve ilerici P, o zaman aşağıdaki sınıf II Assur grupları mümkündür:
1.VVV(şek.2.2); 2. GSYİH(şek.2.3); 3. ERW(şek.2.4); 4. PPV (Şekil 2.5); 5. PVP (Şekil 2.6).

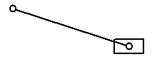
Fig.2.2 Fig.2.3 Fig.2.4
 |

Şekil 2.5 Şekil.2.6.
Dönme çiftlerini öteleme çiftleriyle değiştirme yolunu izleyerek, üç dönme çiftini de öteleme çiftleriyle değiştirmek mümkün olacak gibi görünüyor ( RFP). Ancak bu durumda, bu Assur grubu, rafa takıldığında, yalnızca öteleme çiftleri olan düz bir mekanizmaya dönüşecektir - bir kama mekanizması (Şekil 1.7).
Assur grupları, iç ve dış kinematik çiftleri birbirinden ayırır.
Mekanizmanın hareketlilik derecesinin belirlenmesi
Mekansal bir kinematik zincirin hareketlilik derecesinin belirlenmesi
Kinematik zincirin monte edildiği n tane bağlantımız olsun. Bağlantılar kinematik çiftler halinde bağlı olmasa da, her birinin altı serbestlik derecesi (serbestlik derecesi) vardır. Kinematik bir zincire katılmadan önce tüm bağlantılar bu nedenle 6n serbestlik derecesine sahipti. Bağlantıları bir kinematik zincirde birleştirdikten sonra, farklı sınıflardan (farklı hareketlilik derecelerine sahip) kinematik çiftler elde edeceğiz. Kinematik zincirimizin beş sınıfın hepsinin kinematik çiftlerine sahip olduğunu varsayalım. Aşağıdaki gösterimi kabul ediyoruz:
P 5 - tarafımızdan oluşturulan kinematik zincirdeki beşinci sınıfın kinematik çiftlerinin sayısı,
P 4 - dördüncü sınıfın kinematik çiftlerinin sayısı,
P 3 - üçüncü sınıfın kinematik çiftlerinin sayısı,
P 2 - ikinci sınıfın kinematik çiftlerinin sayısı,
P 1 - birinci sınıfın kinematik çiftlerinin sayısı.
Her kinematik çift, bağlantıların hareketini kısıtlar, onlardan sınıfı kadar serbestlik derecesi alır. 5. sınıfın her kinematik çifti, bağlantılardan 5 derecelik serbestlik seçer. Beşinci sınıfın tüm çiftleri 5P 5 serbestlik derecesi, dördüncü sınıf - 4P 4, üçüncü - 3P 3, ikinci - 2P 2, birinci - 1P 1 bağlantılarından alınacaktır. Tüm kayıp serbestlik dereceleri, 6n bağlantılarının toplam serbestlik derecesi sayısından çıkarılırsa, kinematik zincir W'nin serbestlik derecesi sayısını elde ederiz:
W \u003d 6n-5P 5 -4P 4 -3P 3 -2P 2 -1P 1. (bir)
Mekanizmanın hareketlilik derecesi rafa rijit bir şekilde bağlı koordinat sistemindeki mekanizma bağlantılarının konumlarını belirlemek için ayarlanması son derece önemli olan bağımsız koordinatların sayısını adlandırmak gelenekseldir.
Mekanizma, tamamen sabitlenmiş bir bağlantıya sahip olması bakımından kinematik zincirden farklıdır. Sabit bağlantı altı serbestlik derecesinin tamamını kaybetti. Bu nedenle mekanizmadaki hareketli bakla sayısı n-1'dir. n-1 hareketli bağlantıların sayısını formül (1) ile değiştirerek, mekanizmanın hareketlilik derecesini belirlemek için bir formül elde ederiz:
W=6(n-1)-5P 5 -4P 4 -3P 3 -2P 2 -1P 1 . (2)
Formül (2) ilk olarak Malyshev tarafından uzamsal mekanizmalar için elde edildi.
Düz mekanizmaların hareketlilik derecesini belirlemek için Malyshev formülünü düşünün. Düz bir mekanizmanın tüm bağlantıları üç serbestlik derecesine sahip olabilir ve kinematik çiftler sırasıyla 1 veya 2 serbestlik derecesine sahip olabilir. Düzlemsel kinematik çiftler sınıflar tarafından ele alınırsa, bunlar yalnızca beşinci ve dördüncü sınıflardandır. Aynı zamanda, düz mekanizmanın tüm bağlantılarının toplam serbestlik derecesi sayısının 3(n-1) olduğunu dikkate almak son derece önemlidir. Beşinci sınıfın çiftleri, dördüncü - bir olmak üzere iki derece hareketlilik kaybeder. Bu nedenle, düz mekanizmanın hareketlilik derecesi aşağıdaki formülle belirlenmelidir:
W=3(n-1)-2P 5-P4. (3)
Düz bir mekanizmanın hareketlilik derecesini belirlemek için formül (3) ilk önce P. L. Chebyshev tarafından elde edildi.
Mekanizmaya dayatılan genel ilişki koşullarının sayısının bağımlılığı dikkate alınarak, mekanizmalar ailelere ayrılır.
Mekanizma aileleri ve yapısal formülleri Tablo 1'de gösterilmiştir.
Tablo 2.1 Çeşitli mekanizma ailelerinin yapısal formülleri

Başvuruyu Düşünün yapısal formül Chebyshev P. L. belirli bir örnek üzerinde. Şekil 5, eklemli bir dört-bağlantıyı göstermektedir.
1e- bağlantı- krank- taahhütler döner hareket O ekseni etrafında ( tam dönüş);
2e- AB bağlantısı - biyel - düzlem-paralel bir hareket yapar;
3e- BC bağlantısı - külbütör (veya dengeleyici) - C ekseni etrafında ileri geri bir dönme hareketi gerçekleştirir ( eksik ciro);
4e- OS bağlantısı - stand (yatak) - sabit bağlantı.
Bağlantı sayısı n=4. Kinematik çiftler: 4-1, 1-2, 2-3, 3-4. 4 tek hareketli çiftimiz var 5 inci sınıf. Tüm bağlantıların bağıl hareketi düzdür. Mekanizma düzdür. Hareketlilik derecesini Chebyshev P. L. formülüne göre belirliyoruz:
W=3(n-1)-2P 5 -P 4 =3(4-1)-2×4-0=1.
Mekanizmanın hareketlilik derecesi 1'e eşittir. Bu, çerçeveye rijit bir şekilde bağlı olan koordinat sistemindeki mekanizmanın herhangi bir bağlantısına bir koordinat koymanın, diğer tüm bağlantıların konumlarını belirlemek için yeterli olduğu anlamına gelir. Örneğin, bizim durumumuzda, krank j 1 'in dönüş açısını ayarlamak yeterlidir.
 Pasif Linkler ve Fazla Linkler
Pasif Linkler ve Fazla Linkler
Bağlantılar ve kinematik çiftler, mekanizmanın hareketinin doğasını bir bütün olarak etkilemeyen, denir yedekli (ekstra) bağlantılar ve çiftler, ve bunlar tarafından koşullandırılan bağlara pasif bağlar denir.
Mekanizmanın hareketlilik derecesi belirlenirken, gereksiz bağlantılar ve kinematik çiftler dikkate alınmamalıdır.
Karmaşık çubuk mekanizmalarında, hareketlilik derecesini gözle belirlemek her zaman mümkün değildir. Bu durumlarda Chebyshev formülünü kullanmak son derece önemlidir.
 Çift paralelkenar mekanizmasının W'sini tanımlayalım (Şekil 6). Burada AB=BC=KM=MN; bir || BM || CK; AN=BM=CK ve AC || K.N. Bu tür bir bağlantı oranıyla, mekanizma W=1'e sahiptir, yani diğer tüm bağlantıların konumlarını belirlemek için bağlantı 1'in konumunu j 1 açısıyla ayarlamak yeterlidir. Bağlantı 1'i herhangi bir pozisyonda sabitlerseniz, kalan bağlantılar hareketsiz olacaktır. W'yi Chebyshev formülüyle tanımlarız. Bağlantı sayısı - n=5, kinematik çiftler 5 inciР 5 =6 sınıfı, dördüncü sınıfın kinematik çiftlerinin sayısı - Р 4 =0.
Çift paralelkenar mekanizmasının W'sini tanımlayalım (Şekil 6). Burada AB=BC=KM=MN; bir || BM || CK; AN=BM=CK ve AC || K.N. Bu tür bir bağlantı oranıyla, mekanizma W=1'e sahiptir, yani diğer tüm bağlantıların konumlarını belirlemek için bağlantı 1'in konumunu j 1 açısıyla ayarlamak yeterlidir. Bağlantı 1'i herhangi bir pozisyonda sabitlerseniz, kalan bağlantılar hareketsiz olacaktır. W'yi Chebyshev formülüyle tanımlarız. Bağlantı sayısı - n=5, kinematik çiftler 5 inciР 5 =6 sınıfı, dördüncü sınıfın kinematik çiftlerinin sayısı - Р 4 =0.
W=3(n-1)-2P 5 -P 4 =3(5-1)-2×6-0=0.
W=0 ise, bir mekanizma değil, katı bir çiftlik olmalıdır. Mekanizmanın hareketi gerçekleştirebildiğini görüyoruz. durumunda ise bu mekanizma bağlantı 5'i (veya 2) zihinsel olarak kaldırın, ardından kalan bağlantıların hareketinin doğası değişmeden kalacaktır. Mekanizma, W'sini zaten belirlediğimiz sıradan bir dört bağlantıya dönüşür - W=1. Bağlantı 5 ortadan kaldırıldığında, 2 kinematik çift aynı anda elimine edilir: 5-1, 5-3. Sonuç olarak, bu mekanizmada, bir bağlantı ve iki kinematik çift gereksizdir.
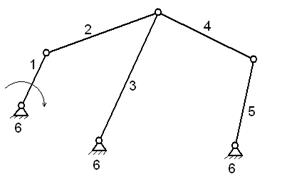
 Başka bir örnek düşünün - genellikle sallanan bir konveyör için tahrik olarak kullanılan Marcus mekanizması (Şekil 7). Bağlantı sayısı n=6. Kinematik çiftler: 6-1, 1-2, 2-3, 2-4, 3-4, 3-6, 4-5, 5-6 tüm beşinci sınıf R 5 = 8, R 4 = 0 .
Başka bir örnek düşünün - genellikle sallanan bir konveyör için tahrik olarak kullanılan Marcus mekanizması (Şekil 7). Bağlantı sayısı n=6. Kinematik çiftler: 6-1, 1-2, 2-3, 2-4, 3-4, 3-6, 4-5, 5-6 tüm beşinci sınıf R 5 = 8, R 4 = 0 .
W'yi Chebyshev formülüyle tanımlarız:
W=3(n-1)-2P 5 -P 4 =3(6-1)-2×8-0=-1.
Mekanizma şemasına göre çalışacağı ve W=1 olduğu görülmektedir.
2-3 numaralı bağlantıların doğrudan bağlantısı olmasın. 3, 4, 5 bağlantıları, 1, 2, 4 bağlantılarının bu açıda sabitlenmesi gerektiğinden, bağlantı 1'in j 1 dönüş açısına karşılık gelen bir pozisyon almaya devam edecektir. Aynısı, 2-4 veya 4-3 kinematik çifti kaldırıldığında da elde edilebilir. Burada bir kinematik çift gereksizdir. Göz ardı edilebilir. O zamanlar:
W=3(6-1)-2×7=1.
Aynı zamanda, bağlantının ortadan kaldırılmasının bazı kinematik çiftlerin ortadan kaldırılmasını gerektirdiğini not ediyoruz.
ref.rf'de barındırılıyor
Kinematik çiftlerin ortadan kaldırılması (bağlantıların temasının kesilmesi), içerdiği bağlantıların kaçınılmaz olarak ortadan kaldırılmasını gerektirmez.
3 veya daha fazla bağlantının bağlı olduğu bağlantıların bağlantısına genel olarak denir. düğüm. Bir düğümde bağlantılardan daha az bir kinematik çift vardır.
 Aşırı kinematik çiftler ve bağlantılar, mekanizmanın üretiminin doğruluğuna ek koşullar getirir, ancak buna rağmen, herhangi bir ek gerekli nitelikleri elde etmek için bazen mekanizmaya pasif bir bağlantı veya ekstra bir bağlantı eklenir; mukavemette artış, sürtünmede azalma vb.
Aşırı kinematik çiftler ve bağlantılar, mekanizmanın üretiminin doğruluğuna ek koşullar getirir, ancak buna rağmen, herhangi bir ek gerekli nitelikleri elde etmek için bazen mekanizmaya pasif bir bağlantı veya ekstra bir bağlantı eklenir; mukavemette artış, sürtünmede azalma vb.
Şekil 2.8'de gösterilen kam mekanizmasının W'sini belirleyelim. Burada bağlantılar 1 - kam, 2 - itici, 3 - silindir, 4 - raftır. Bağlantı sayısı n=4. Beşinci sınıfın kinematik çiftleri 1-4, 2-4, 2-3 ve 3-1 - en yüksek düz kinematik çift 4 inci sınıf.
Kam j açısıyla döndürüldüğünde, itici belirli bir pozisyon alacaktır. İlk bakışta W=1. W'yi Chebyshev formülüyle tanımlarız:
W=3(4-1)-2×3-2=2.
Burada ekstra bir hareketlilik derecesi var. Silindir bir itici ile sabitlenmişse, mekanizmanın W'si bire eşit olacaktır. Baklaların geri kalanına göre silindirin dönmesinin hiçbir etkisi yoktur. Silindirin dönüş açısı, mekanizmanın ekstra serbestlik derecesidir.
Ekstra bir özgürlük derecesi Bazı bağlantıların hareketinde böyle bir serbestlik derecesi olarak adlandırmak gelenekseldir; bunun ortadan kaldırılması, kinematik hususlar için diğer bağlantıların hareketinin doğasında değişikliklere neden olmaz.
Bu, bağlantının mutlak veya göreli hareketini ifade eder. Fazladan bir serbestlik derecesinin ortadan kaldırılması, bağlantının ortadan kaldırılmasını gerektirmez.
Chebyshev formülünü kullanmadan önce, pasif kısıtlamaları ve ekstra serbestlik derecelerini zihinsel olarak dışlamak son derece önemlidir.
Chebyshev formülü genellikle doğru cevabı verir. Genel durumlarda, pasif bağlantılar ve ekstra serbestlik dereceleri yoktur ve sadece özel durumlarda mevcuttur.
Örneğin: çift paralelkenar mekanizması, bağlantılar paralel olmadığında aynı mekanizmanın özel bir durumudur (Şekil 9a); Marcus mekanizması, bağlantı 2, 4'ün döner mafsallarının eksenleri çakışmadığında mekanizmanın özel bir durumudur (Şekil 9b); yuvarlak bir silindir, bir silindirin geometrik şeklinin daha özel bir durumudur yuvarlak biçimde(Şekil 9c).
Böylece, Chebyshev formülü tanımlamayı mümkün kılar. özellikler(özellikle) mekanizmalar.
Mekanizmanın hareketlilik derecesinin belirlenmesi - kavram ve türleri. "Mekanizmanın hareketlilik derecesinin belirlenmesi" kategorisinin sınıflandırılması ve özellikleri 2014, 2015.





