Sus pe un plan înclinat. Mișcarea unui corp pe un plan înclinat
caz de deplasare accelerată în jos
Mișcarea corpului de-a lungul plan înclinat
Mișcarea unui corp de-a lungul unui plan înclinat este un exemplu clasic de mișcare a unui corp sub acțiunea mai multor forțe necodirecționale. Metoda standard pentru rezolvarea problemelor de acest tip de mișcare este extinderea vectorilor tuturor forțelor în componente direcționate de-a lungul axelor de coordonate. Astfel de componente sunt liniar independente. Acest lucru vă permite să scrieți a doua lege a lui Newton pentru componentele de-a lungul fiecărei axe separat. Deci a doua lege a lui Newton, care este ecuație vectorială, se transformă într-un sistem de două (trei pentru cazul tridimensional) ecuații algebrice.
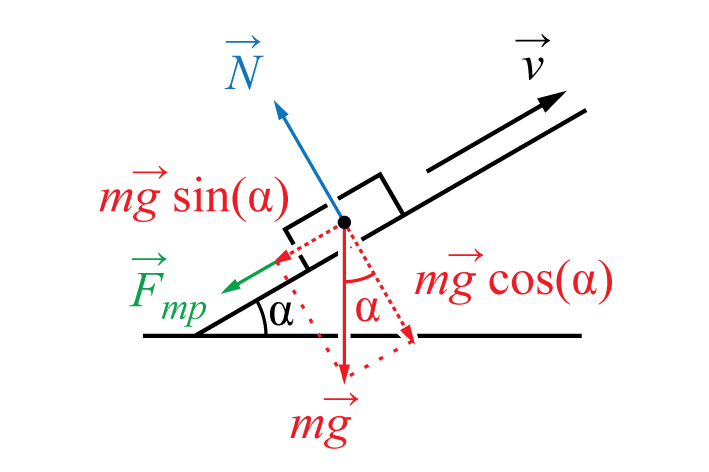
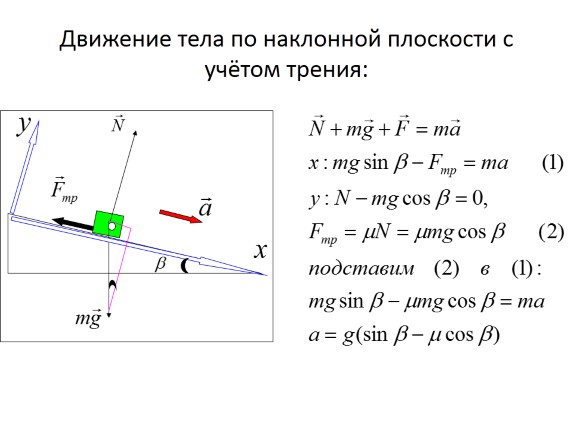
Luați în considerare un corp care alunecă pe un plan înclinat. În acest caz, asupra lui acţionează următoarele forţe:
- Gravitatie m g , îndreptată vertical în jos;
- Susține forța de reacție N , îndreptată perpendicular pe plan;
- forța de frecare de alunecare F tr, îndreptată opus vitezei (în sus de-a lungul planului înclinat când corpul alunecă)
forța de frecare de alunecare F tr = µN proporţională cu forţa de reacţie a suportului. Acest lucru vă permite să obțineți următoarea expresie pentru forța de frecare: F tr = mmg cos( α ) . Această forță este opusă componentei de „tragere” a gravitației. Prin urmare, pentru corpul alunecând în jos , obținem expresiile pentru forța totală rezultantă și accelerația:
F x= mg(păcat( α
) – µ
cos( α
));
A x= g(păcat( α
) – µ
cos( α
)).
Nu este greu de văzut că dacă µ α) , atunci expresia are semn pozitiv și avem de-a face cu o mișcare uniform accelerată în jos pe planul înclinat. Dacă µ >tg( α ), atunci accelerația va avea semn negativ și mișcarea va fi la fel de lentă. O astfel de mișcare este posibilă numai dacă corpului i se dă o viteză inițială în jos pe panta. În acest caz, corpul se va opri treptat. Dacă, sub rezerva µ >tg( α ) obiectul este inițial în repaus, apoi nu va începe să alunece în jos. Aici, forța de frecare statică va compensa pe deplin componenta de „tragere” a gravitației.
Când coeficientul de frecare este exact egal cu tangenta unghiului de înclinare al planului: µ
= tg( α
) , avem de-a face cu o compensare reciprocă a tuturor celor trei forțe. În acest caz, conform primei legi a lui Newton, corpul poate fi fie în repaus, fie se poate mișca cu o viteză constantă (În acest caz, mișcarea uniformă este posibilă numai în jos).
Forțele care acționează asupra blocului
alunecare pe un plan înclinat:
sus carcasa cu încetinitorul
Cu toate acestea, corpul poate conduce și în sus în planul înclinat. Un exemplu de astfel de mișcare este mișcarea unui disc de hochei pe un tobogan de gheață. Când un corp se mișcă în sus, atât forța de frecare, cât și componenta de „tragere” a gravitației sunt direcționate în jos de-a lungul unui plan înclinat. În acest caz, avem întotdeauna de-a face cu o mișcare uniformă lentă, deoarece forța totală este îndreptată în direcția opusă vitezei. Expresia accelerației pentru această situație se obține într-un mod similar și diferă doar în semn. Prin urmare corpul alunecând într-un plan înclinat , avem:
A x= g(păcat( α
) + µ
cos( α
)).
id="tabs-1">
Acest model este o diagramă animată a unei școli clasice munca de laboratorîn fizică, pentru a studia mișcarea accelerată a unui corp sub acțiunea mai multor forțe pe un plan înclinat.
În acest model, puteți seta următoarele valori:
- Înălțimea / unghiul planului înclinat (punct roșu);
- Coeficientul de frecare de alunecare a barei pe suprafață (glisor superior);
- Poziția inițială a corpului (punct albastru M);
- Poziția senzorilor cronometrului (triunghiuri roșii S 1 și S 1);
- Steagul pentru afișarea vectorilor de forță care acționează asupra corpului.
- Unghiul de înclinare al planului înclinat;
- Timpul mișcării corpului de la primul senzor de cronometru la al doilea:
- La calcularea timpului, acesta este introdus artificial eroare de măsurare a timpului, repartizat conform legii normale!
- Coordonatele senzorului;
- Coordonatele pozitiei initiale a barei;
- Se construiesc vectorii forțelor care acționează asupra corpului.
Gestionarea modelului interactiv
- Schimbați scara: „CTRL + rotiță mouse” sau "CTRL + "+""–"CTRL + "-""
- Schimba poziția: trageți în timp ce țineți apăsat „CTRL + butonul stâng al mouse-ului”
- Ștergeți toate „urmele”: CTRL+F»
Descărcați modelul
Modelele marcate cu © CC-BY-SA sunt create de persoanele enumerate pe site. Modele interactive distribuite sub licență Creative Commons Atribuire-Partajare Like 3.0
Atribuire-Partajare la fel (de-sa)- Licență „Cu indicație de autor – Copyleft”. Această licență permite altora să relueze, să corecteze și să dezvolte lucrarea, chiar și în scopuri comerciale, cu condiția ca atribuirea să fie acordată și lucrările derivate să fie licențiate în condiții similare. Această licență este o licență copyleft. Toate lucrările noi bazate pe cele licențiate în temeiul acesteia vor avea aceeași licență, astfel încât toate lucrările derivate vor putea fi modificate și utilizate în scopuri comerciale. La reproducerea lucrărilor distribuite sub această licență, este necesar un link către site!
Descărcați modelul
id="tabs-2">
Întrebări pentru autoexaminare pe tema „Plan înclinat”
- Când mișcarea pe un plan înclinat este uniform lentă?
- Când alunecă un corp uniform pe un plan înclinat?
- La ce valori ale unghiului de înclinare se poate sprijini bara pe un plan înclinat?
- De ce este convenabil să alegeți un sistem de coordonate oblic pentru un plan înclinat?
- Care este forța de frecare care ține blocul în repaus?
- Ce se întâmplă cu forța de reacție a suportului când unghiul de înclinare crește?
- Se poate mișca un corp uniform într-un plan înclinat?
          |
Slide-urile și textul acestei prezentări
slide 1
slide 2
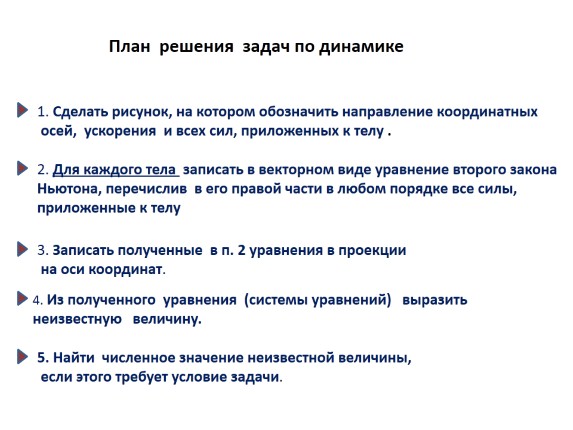
Plan pentru rezolvarea problemelor în dinamică
1. Realizați un desen pe care să indicați direcția axelor de coordonate, accelerația și toate forțele aplicate corpului.
2. Pentru fiecare corp, notează sub formă vectorială ecuația celei de-a doua legi a lui Newton, înscriind pe partea dreaptă în orice ordine toate forțele aplicate corpului
3. Notati ecuatiile obtinute in paragraful 2 in proiectie pe axele de coordonate.
5. Aflați valoarea numerică a mărimii necunoscute, dacă este necesar de condiția problemei.
4. Din ecuația rezultată (sistemul de ecuații) exprimă cantitate necunoscută.
slide 3
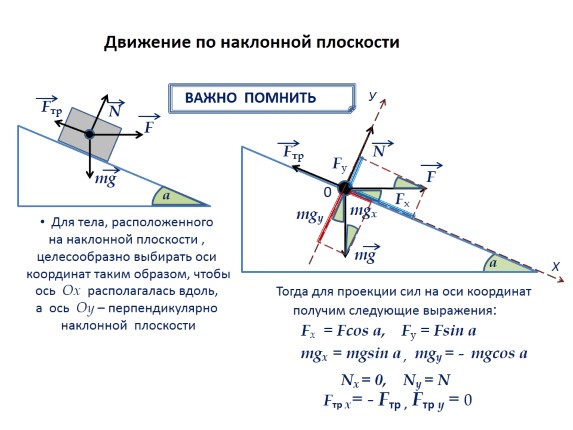
Mișcarea pe un plan înclinat
IMPORTANT DE REȚINUT
mg
N
F
Ftr.
Pentru un corp situat pe un plan înclinat, este indicat să alegeți axele de coordonate în așa fel încât axa Ox să fie situată de-a lungul, iar axa Oy să fie perpendiculară pe planul înclinat.
A
Apoi pentru proiecția forțelor pe axele de coordonate obținem următoarele expresii:
Fx. = Fcos a, Fu = Fsin a
mgx. = mgsin a, mgy = - mgcos a
Nx = 0,
Ny=N
Ftr x= - Ftr., Ftr y = 0 .
slide 4
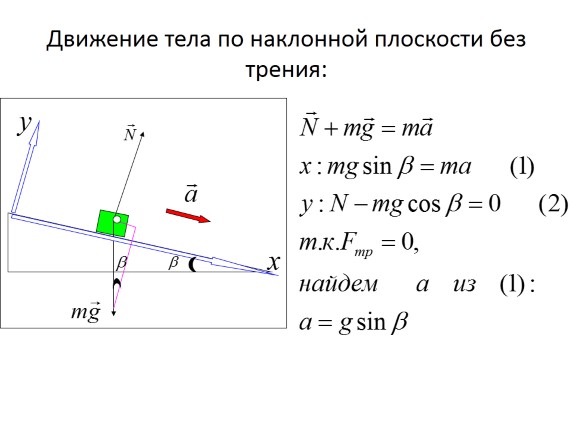
Mișcarea unui corp pe un plan înclinat fără frecare:
slide 5
Mișcarea unui corp de-a lungul unui plan înclinat, ținând cont de frecare:
slide 6
A
β
m1g
m2g
N1
N2
T
T
La
La
X
X
A
A
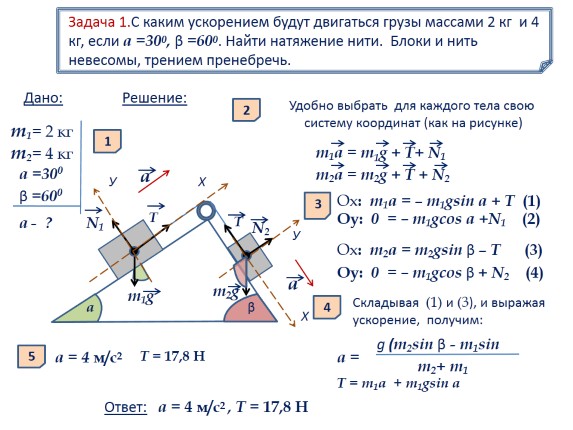
Sarcina 1. Cu ce accelerație se vor deplasa sarcinile maselor de 2 kg și 4 kg, dacă a = 300, β = 600. Găsiți tensiunea firului. Blocurile și firele sunt lipsite de greutate, frecarea este neglijată.
m1= 2 kg
m2= 4 kg
Dat:
a = 300
β=600
A - ?
Soluţie:
1
2
Este convenabil să alegeți pentru fiecare corp propriul sistem de coordonate (ca în figură)
m1a = m1g + T + N1
m2a = m2g + T + N2
3
Ox: m1a \u003d - m1gsin a + T (1)
Oy: 0 = - m1gcos a + N1 (2)
Оx: m2a = m2gsin β – T (3)
Oy: 0 = – m1gcos β + N2 (4)
4
Adăugând (1) și (3) și exprimând accelerația, obținem:
g (m2sin β - m1sin
a =
m2+ m1
T = 17,8 H
T = m1a + m1gsin a
5
a = 4 m/s2
Răspuns: a \u003d 4 m / s2, T \u003d 17,8 H
Slide 7
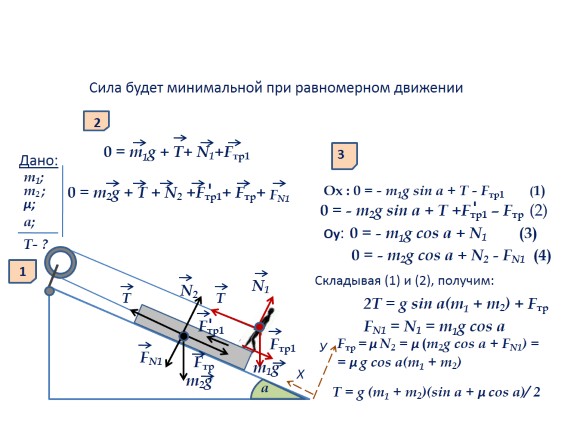
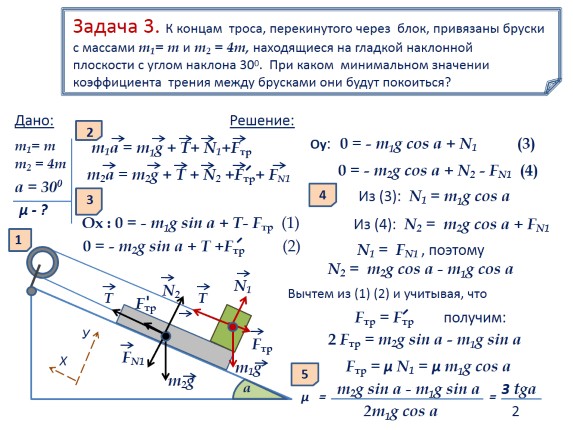
Problema 2. Un om de masa m1, sprijinindu-și picioarele pe o cutie de masa m2, o trage în sus cu o frânghie aruncată peste un bloc de-a lungul unui plan înclinat cu un unghi de înclinare a. Care este forța minimă necesară pentru a trage frânghia pentru a trage cutia spre bloc? Coeficientul de frecare dintre miez și planul înclinat μ
Deci, voi încerca să descriu în detaliu cursul raționamentului meu pe această problemă. La prima lecție, le-am pus întrebarea elevilor: cum se poate mișca un corp de-a lungul unui plan înclinat? Împreună răspundem: rulați uniform, cu accelerație; se odihnește pe un plan înclinat; stai pe el; deplasați-vă sub acțiunea forței de tracțiune uniform, cu accelerație; conduceți sub acțiunea forței de tracțiune uniform, cu accelerație. În figuri, în două sau trei exemple, arătăm ce forțe acționează asupra corpului în acest caz. Pe parcurs, introduc conceptul de rezultanta rulanta. Scriem ecuația de mișcare în formă vectorială, apoi înlocuim suma rezultantei de rulare din ea (notați-o după cum doriți). Facem acest lucru din două motive: în primul rând, nu este nevoie să proiectăm vectorii forței pe axă și să rezolvăm două ecuații; în al doilea rând, echilibrul de forțe va fi afișat corect, pe baza condițiilor problemei.
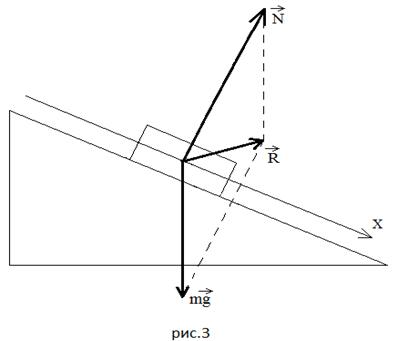
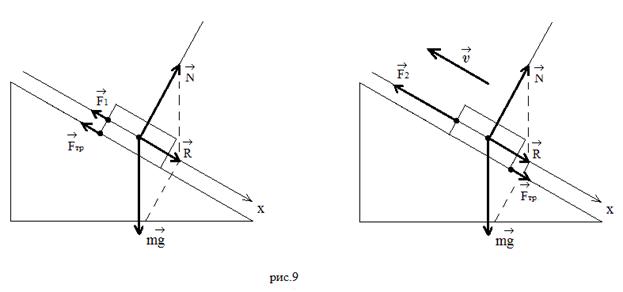
Vă voi arăta cu exemple concrete. Exemplul 1: corpul sub acțiunea forței de tracțiune se deplasează uniform (Figura 1).
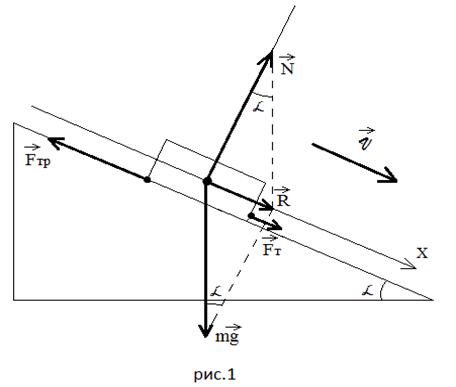
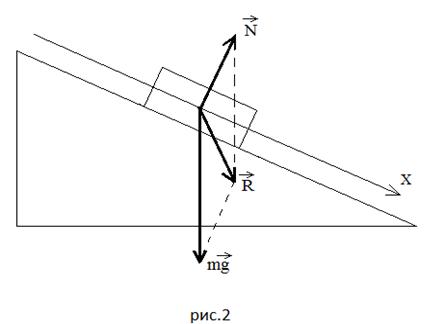
În primul rând, elevii trebuie să învețe algoritmul pentru construirea unui desen. Înfățișăm un plan înclinat, în mijlocul acestuia - un corp sub formă de dreptunghi, desenați o axă prin mijlocul corpului paralel cu planul înclinat. Direcția axei nu este esențială, dar în cazul mișcării uniform accelerate, este mai bine să se arate în direcția vectorului, astfel încât în formă algebrică în ecuația de mișcare din partea dreaptă în față să existe un plus semn. Apoi, construim puterea. Tragem forța de gravitație vertical în jos de o lungime arbitrară (cert să facem desenele mari, astfel încât totul să fie clar pentru toată lumea). Apoi, din punctul de aplicare al forței gravitaționale - perpendicular pe axa, de-a lungul căruia se va îndrepta forța de reacție a suportului. Desenați o linie întreruptă paralelă cu această perpendiculară de la capătul vectorului până când se intersectează cu axa. Din acest punct - o linie punctată paralelă cu intersecția cu perpendiculara - obținem un vector de lungimea corectă. Astfel, am construit un paralelogram pe vectori și , indicând automat valoarea corectă a forței de reacție a suportului și construind, după toate regulile geometriei vectoriale, rezultanta acestor forțe, pe care o numesc rezultanta de rulare (diagonala care coincide cu axa). În acest moment, folosind metoda din manual, într-o figură separată arăt forța de reacție a unui suport de lungime arbitrară: mai întâi, mai scurt decât este necesar și apoi mai lung decât este necesar. Arăt forța rezultantă a gravitației și forța de reacție a suportului: în primul caz, acesta este îndreptat în jos sub un unghi față de planul înclinat (Figura 2), în al doilea caz, în sus sub un unghi față de planul înclinat ( Figura 3).
Tragem o concluzie foarte importantă: raportul dintre forța gravitației și forța de reacție a suportului trebuie să fie astfel încât corpul sub acțiunea lor (sau sub acțiunea unei rezultante de rulare) în absența altor forțe să se deplaseze în jos. de-a lungul plan înclinat. În continuare, întreb: ce alte forțe acționează asupra corpului? Băieții răspund: forță de tracțiune și forță de frecare. Pun următoarea întrebare: ce forță vom arăta mai întâi și apoi ce? Mă străduiesc să obținem un răspuns corect și justificat: mai întâi, în acest caz, este necesar să arătăm forța de tracțiune și apoi forța de frecare, al cărei modul va fi este egală cu suma module de forță de tracțiune și de rulare rezultantă: , deoarece în funcție de starea problemei, corpul se mișcă uniform, prin urmare, rezultanta tuturor forțelor care acționează asupra corpului trebuie să fie egală cu zero conform primei legi a lui Newton. Pentru control, pun o întrebare provocatoare: deci câte forțe acționează asupra corpului? Băieții trebuie să răspundă - patru (nu cinci!): gravitația, forța de reacție a suportului, forța de tracțiune și forța de frecare. Acum scriem ecuația mișcării sub formă vectorială conform primei legi a lui Newton:
Inlocuim suma vectorilor cu o rezultanta rulanta:
Obținem o ecuație în care toți vectorii sunt paraleli cu axa. Acum scriem această ecuație în termenii proiecțiilor vectorilor pe axă:
Această intrare poate fi omisă în viitor. Să înlocuim în ecuație proiecțiile vectorilor pe modulele lor, ținând cont de direcțiile:
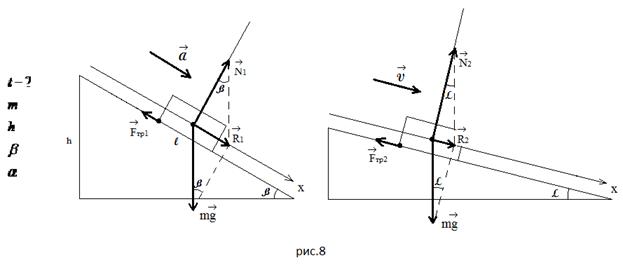
Exemplul 2: corpul sub acțiunea forței de tracțiune se deplasează pe un plan înclinat cu accelerație (Figura 4).
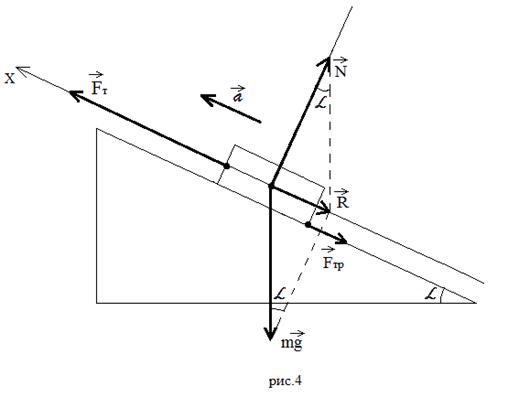
În acest exemplu, elevii ar trebui să spună că după construirea forței gravitaționale, a forței de reacție a suportului și a rezultantei de rulare a următorului, este necesar să se arate forța de frecare, ultima fiind vectorul forței de tracțiune, care trebuie fi mai mare decât suma vectorilor, deoarece rezultanta tuturor forțelor trebuie să fie îndreptată în aceeași direcție cu vectorul accelerație conform celei de-a doua legi a lui Newton. Ecuația de mișcare a corpului trebuie scrisă conform celei de-a doua legi a lui Newton:
Dacă există posibilitatea de a lua în considerare alte cazuri în lecție, atunci nu neglijăm această oportunitate. Dacă nu, atunci dau această sarcină acasă. Cineva poate lua în considerare toate cazurile rămase, cineva unele - dreptul de a alege studenții. În lecția următoare, verificăm, corectăm erorile și trecem la rezolvarea unor probleme specifice, după ce am exprimat anterior din triunghiuri vectoriale și:
Egalitatea (2) este de dorit să se analizeze pentru diferite unghiuri. La ![]() avem: ca la deplasarea orizontală sub acţiunea unei forţe orizontale de împingere. Pe măsură ce unghiul crește, cosinusul său scade, prin urmare, forța de reacție a suportului scade și ea și devine din ce în ce mai mică decât forța gravitațională. La un unghi
avem: ca la deplasarea orizontală sub acţiunea unei forţe orizontale de împingere. Pe măsură ce unghiul crește, cosinusul său scade, prin urmare, forța de reacție a suportului scade și ea și devine din ce în ce mai mică decât forța gravitațională. La un unghi ![]() este egal cu zero, adică corpul nu acționează asupra suportului și suportul, în consecință, „nu reacționează”.
este egal cu zero, adică corpul nu acționează asupra suportului și suportul, în consecință, „nu reacționează”.
Prevăd întrebarea adversarilor: cum se aplică această tehnică în cazurile în care forța de împingere este orizontală sau îndreptată într-un unghi față de un plan înclinat? Voi răspunde cu exemple concrete.
a) Corpul este târât cu accelerație pe un plan înclinat, aplicând o forță de tracțiune pe orizontală (Figura 5).
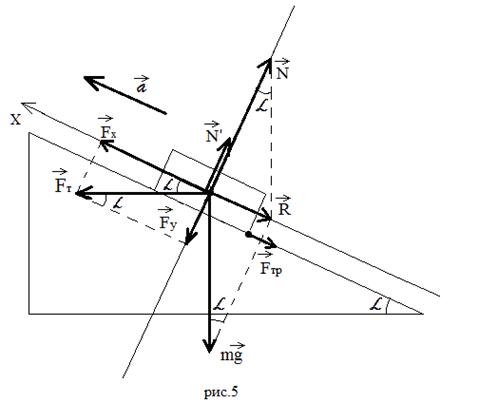
Descompunem forța de tracțiune orizontală în două componente: de-a lungul axei - și perpendicular pe axa - (operația este opusă construcției rezultantei forțelor perpendiculare). Scriem ecuația mișcării:
Înlocuim rezultatul de rulare și în schimb scriem:
Din triunghiuri vectoriale exprimăm: ![]() și :
și : ![]() .
.
Sub acțiunea unei forțe orizontale, corpul nu numai că se ridică în planul înclinat, ci și apăsă suplimentar împotriva acestuia. Prin urmare, apare o forță suplimentară de presiune egală cu modulul vectorului și, conform legii a treia a lui Newton, o forță suplimentară de reacție a suportului: ![]() . Atunci forța de frecare va fi:
. Atunci forța de frecare va fi: ![]() .
.
Ecuația mișcării va lua forma:
Aici am descifrat complet ecuația mișcării. Acum rămâne să exprimăm valoarea dorită din ea. Încercați să rezolvați această problemă în mod tradițional și veți obține aceeași ecuație, doar că soluția va fi mai greoaie.
b) Corpul este tras uniform din planul înclinat, aplicând forța de tracțiune pe orizontală (Figura 6).
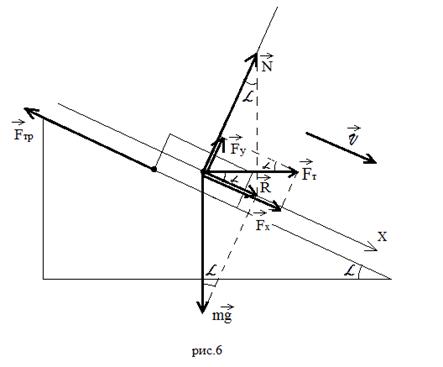
În acest caz, forța de tracțiune, pe lângă tragerea corpului în jos de-a lungul planului înclinat, îl separă și de planul înclinat. Deci ecuația finală arată astfel:
c) Corpul este târât uniform pe un plan înclinat, aplicând o forță de tragere în unghi față de planul înclinat (Figura 7).
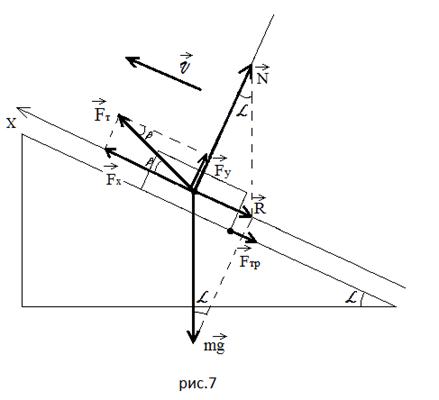
Îmi propun să iau în considerare sarcini specifice pentru a face publicitate și mai convingător abordarea mea metodică de a rezolva astfel de probleme. Dar mai întâi, atrag atenția asupra algoritmului de soluție (cred că toți profesorii de fizică atrag atenția studenților asupra acestuia, iar întreaga mea poveste a fost subordonată acestui algoritm):
1) după ce ați citit cu atenție problema, aflați cum se mișcă corpul;
2) realizați un desen cu imaginea corectă a forțelor, pe baza condițiilor problemei;
3) scrieți ecuația mișcării sub formă vectorială după prima sau a doua lege a lui Newton;
4) scrieți această ecuație în termenii proiecțiilor vectorilor de forță pe axa x (acest pas poate fi omis ulterior, când capacitatea de a rezolva probleme în dinamică este adusă la automatism);
5) exprimă proiecţiile vectorilor în funcţie de modulele acestora, ţinând cont de direcţiile şi scrie ecuaţia în formă algebrică;
6) exprimați modulele de forțe prin formule (dacă este necesar);
7) exprimă valoarea dorită.
Sarcina 1. Cât timp durează ca o masă a unui corp să alunece de pe un plan înclinat cu o înălțime și un unghi de înclinare dacă se mișcă uniform de-a lungul unui plan înclinat cu un unghi de înclinare?
Cum ar fi să rezolvi această problemă în mod obișnuit!
Sarcina 2. Ce este mai ușor: să menții corpul pe un plan înclinat sau să-l miști uniform în sus de-a lungul lui?
Aici, când explic, nu se poate face fără o rezultantă rulantă, după părerea mea.
După cum se poate observa din figuri, în primul caz, forța de frecare ajută la ținerea corpului (este direcționată în aceeași direcție cu forța de reținere), în al doilea caz, aceasta, împreună cu rezultanta de rulare, este direcționată. împotriva mișcării. În primul caz, în al doilea caz.





