Starea de echilibru static. Tipuri de echilibru
Semnul principal al interacțiunii corpurilor în dinamică este apariția accelerațiilor. Cu toate acestea, este adesea necesar să se știe în ce condiții un corp, asupra căruia este acționat de mai multe forțe diferite, nu se mișcă cu accelerație. Să spânzurăm
minge pe o sfoară. Forța gravitației acționează asupra mingii, dar nu provoacă mișcare accelerată către Pământ. Acest lucru este prevenit prin acțiunea unei forțe elastice egale în valoare absolută și direcționată în sens opus. Forța gravitației și forța elasticității se echilibrează reciproc, rezultanta lor este zero, de aceea accelerația bilei este și ea zero (Fig. 40).
Punctul prin care trece rezultanta gravitației în orice locație a corpului se numește centru de greutate (Fig. 41).
Ramura mecanicii care studiază condițiile echilibrului de forțe se numește statică.
Echilibrul corpurilor care nu se rotesc.
Rectilinie uniformă mișcare înainte corpul sau odihna lui este posibilă numai dacă suma geometrică a tuturor forțelor aplicate corpului este egală cu zero.
Un corp care nu se rotește este în echilibru dacă suma geometrică a forțelor aplicate corpului este zero.
Echilibrul corpurilor având o axă de rotație.
LA Viata de zi cu ziși tehnologie, există adesea corpuri care nu se pot mișca înainte, dar se pot roti în jurul unei axe. Exemple de astfel de corpuri sunt ușile și ferestrele, roțile mașinii, balansoarele etc. Dacă vectorul forță P se află pe o linie dreaptă care intersectează axa de rotație, atunci această forță este echilibrată de forța elastică din partea laterală a axei de rotație. (Fig. 42).
Dacă linia dreaptă pe care se află vectorul forță F nu intersectează axa de rotație, atunci această forță nu poate fi echilibrată


forță elastică din partea laterală a axei de rotație, iar corpul se rotește în jurul axei (Fig. 43).
Rotația unui corp în jurul unei axe sub acțiunea unei forțe poate fi oprită prin acțiunea unei a doua forțe.Experiența arată că, dacă două forțe separat fac corpul să se rotească în direcții opuse, atunci când acționează simultan, corpul este în echilibru dacă este îndeplinită următoarea condiție:
unde sunt cele mai scurte distanțe de la liniile drepte pe care se află vectorii forțe (liniile de acțiune a forțelor) până la axa de rotație (Fig. 44). Distanța se numește brațul forței, iar produsul dintre modulul forței și brațul se numește momentul forței M:
Dacă un semn pozitiv este atribuit momentelor de forțe care fac corpul să se rotească în jurul unei axe în sensul acelor de ceasornic și un semn negativ momentelor de forțe care provoacă rotația în sens invers acelor de ceasornic, atunci condiția de echilibru pentru un corp cu o axă de rotație poate fi formulat ca o regulă a momentelor: un corp având o axă fixă de rotație este în echilibru dacă suma algebrică a momentelor tuturor forțelor aplicate corpului în jurul acestei axe este egală cu zero:
Unitatea SI de cuplu este un moment de forță de 1 N, a cărui linie de acțiune se află la o distanță de axa de rotație. Această unitate se numește newtonmetru.
Condiția generală pentru echilibrul unui corp. Combinând cele două concluzii, putem formula o condiție generală pentru echilibrul unui corp: un corp este în echilibru dacă suma geometrică a vectorilor tuturor forțelor aplicate lui și suma algebrică a momentelor acestor forțe în jurul axei lui rotația sunt egale cu zero.
Când condiția de echilibru general este îndeplinită, corpul nu este neapărat în repaus. Conform celei de-a doua legi a lui Newton, când rezultanta tuturor forțelor este egală cu zero, accelerația corpului este egală cu zero și poate fi în repaus sau? mișcați uniform și în linie dreaptă.
Egalitatea la zero a sumei algebrice a momentelor forțelor nu înseamnă, de asemenea, că în acest caz corpul este neapărat în repaus. Timp de câteva miliarde de ani, rotația Pământului în jurul axei sale continuă cu o perioadă constantă tocmai pentru că suma algebrică a momentelor forțelor care acționează asupra Pământului de la alte corpuri este foarte mică. Din același motiv, o roată de bicicletă care se învârte continuă să se rotească la o frecvență constantă și numai forțele externe opresc această rotație.
Tipuri de echilibru.
În practică, un rol important îl joacă nu numai îndeplinirea condiției de echilibru pentru corpuri, ci și caracteristica calitativă a echilibrului, numită stabilitate. Există trei tipuri de echilibru al corpurilor: stabil, instabil și indiferent.
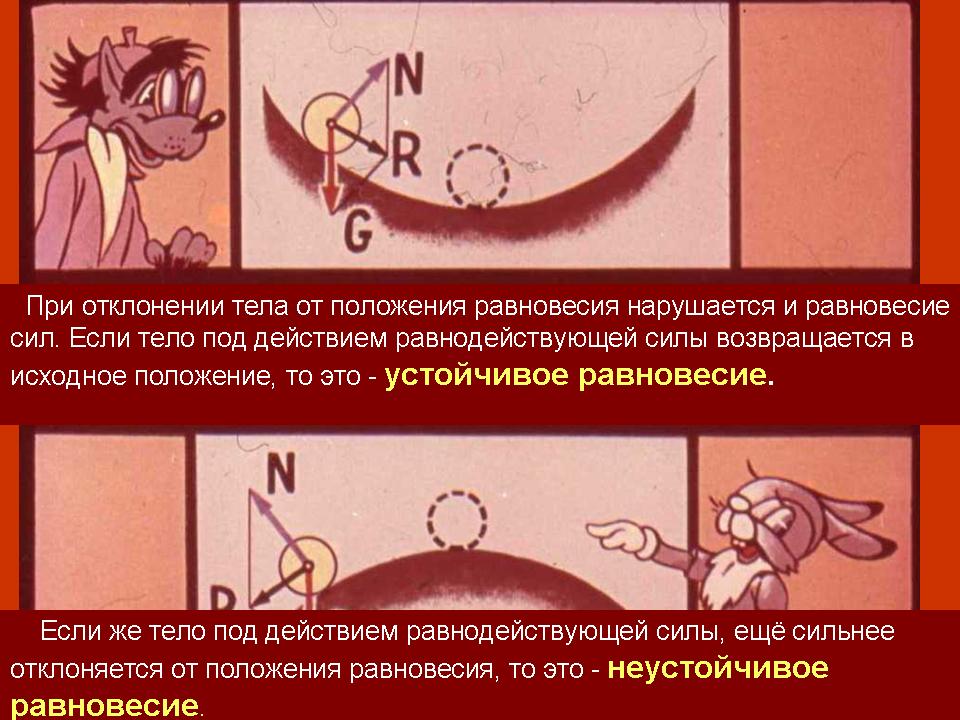
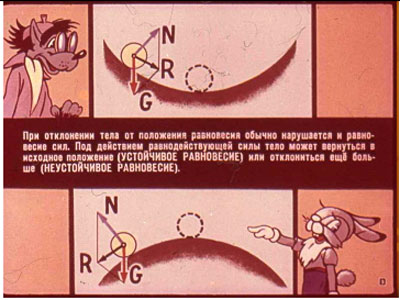
Echilibrul se numește stabil dacă, după mici influențe externe, corpul revine la starea inițială de echilibru. Acest lucru se întâmplă dacă, cu o deplasare ușoară a corpului în orice direcție față de poziția inițială, rezultanta forțelor care acționează asupra corpului devine nenulă și este îndreptată spre poziția de echilibru. În echilibru stabil se află, de exemplu, o minge în partea de jos a adânciturii (Fig. 45).
Echilibrul se numește instabil dacă, cu o ușoară deplasare a corpului din poziția de echilibru, rezultanta forțelor aplicate acestuia este nenulă și este direcționată din poziția de echilibru (Fig. 46).
Dacă, pentru deplasări mici ale corpului față de poziția inițială, rezultanta forțelor aplicate corpului rămâne egală cu zero, atunci corpul se află într-o stare de echilibru indiferent. Mingea se află în echilibru indiferent pe o suprafață orizontală (Fig. 47).


Un corp cu o axă de rotație fixă este în echilibru stabil dacă centrul său de greutate este situat sub axa de rotație și se află pe o linie verticală care trece prin axa de rotație (Fig. 48, a).
Cu o ușoară abatere de la această poziție de echilibru, suma algebrică a momentelor forțelor care acționează asupra corpului devine nenulă și momentul forțelor rezultat transformă corpul în poziția inițială de echilibru (Fig. 48, b).
Dacă centrul de greutate se află pe o linie verticală care trece prin axa de rotație, dar situat deasupra axei de rotație, atunci echilibrul este instabil (Fig. 49, a, b).

Corpul se află în echilibru indiferent când axa de rotație a corpului trece prin centrul său de greutate (Fig. 50).
Echilibrul corpului pe un suport.
Dacă o linie verticală trasată prin centrul de greutate C al corpului traversează zona de sprijin, atunci corpul este în echilibru (Fig. 51). Dacă linia verticală trasată prin centrul de greutate nu traversează zona de sprijin, atunci corpul se răstoarnă (Fig. 52).

















![]()





 Inapoi inainte
Inapoi inainte
Atenţie! Previzualizarea slide-ului are doar scop informativ și este posibil să nu reprezinte întreaga amploare a prezentării. Dacă sunteți interesat acest lucru vă rugăm să descărcați versiunea completă.
Obiectivele lecției: Pentru a studia starea de echilibru a corpurilor, pentru a se familiariza cu tipuri variate echilibru; afla conditiile in care corpul se afla in echilibru.
Obiectivele lecției:
- Instruire: Pentru a studia două condiții de echilibru, tipuri de echilibru (stabil, instabil, indiferent). Aflați în ce condiții corpurile sunt mai stabile.
- În curs de dezvoltare: Pentru a promova dezvoltarea interesului cognitiv pentru fizică. Dezvoltarea abilităților de a compara, generaliza, evidenția principalul lucru, trage concluzii.
- Educational: Să cultive atenția, capacitatea de a-și exprima punctul de vedere și de a-l apăra, de a dezvolta abilitățile de comunicare ale elevilor.
Tip de lecție: lecție de învățare a materialelor noi cu suport computer.
Echipament:
- Disc „Munca și putere” din „Lecții și teste electronice.
- Tabelul „Condiții de echilibru”.
- Prismă înclinată cu un plumb.
- Corpuri geometrice: cilindru, cub, con etc.
- Computer, proiector multimedia, tablă interactivă sau ecran.
- Prezentare.
În timpul orelor
Astăzi în lecție vom învăța de ce macaraua nu cade, de ce jucăria Roly-Vstanka revine întotdeauna la starea inițială, de ce Turnul înclinat din Pisa nu cade?
I. Repetarea și actualizarea cunoștințelor.
- Formulați prima lege a lui Newton. Care este statutul legii?
- La ce întrebare răspunde cea de-a doua lege a lui Newton? Formula și formularea.
- La ce întrebare răspunde cea de-a treia lege a lui Newton? Formula și formularea.
- Care este forța rezultantă? Cum este ea?
- De pe discul „Mișcarea și interacțiunea corpurilor” finalizați sarcina nr. 9 „Rezultata forțelor cu direcții diferite” (regula adunării vectoriale (2, 3 exerciții)).
II. Învățarea de materiale noi.
1. Ce se numește echilibru?
Echilibrul este o stare de odihnă.
2. Condiții de echilibru.(diapozitivul 2)
a) Când este corpul în repaus? Din ce lege vine asta?
Prima condiție de echilibru: Corpul este în echilibru dacă suma geometrică forțe externe aplicat pe corp este zero. ∑ F = 0
b) Fie doi forțe egale, așa cum se arată în imagine.

Va fi ea în echilibru? (Nu, se va întoarce)
Doar punctul central este în repaus, în timp ce ceilalți se mișcă. Aceasta înseamnă că pentru ca corpul să fie în echilibru, este necesar ca suma tuturor forțelor care acționează asupra fiecărui element să fie egală cu 0.
A doua condiție de echilibru: Suma momentelor forțelor care acționează în sensul acelor de ceasornic trebuie să fie egală cu suma momentelor forțelor care acționează în sens invers acelor de ceasornic.
∑ M în sensul acelor de ceasornic = ∑ M în sens invers acelor de ceasornic
Momentul forței: M = F L
L - umărul forței - cea mai scurtă distanță de la punctul de sprijin până la linia de acțiune a forței.
3. Centrul de greutate al corpului și locația acestuia.(diapozitivul 4)
Centrul de greutate al corpului este punctul prin care rezultanta tuturor forțe paralele gravitația care acționează asupra elementelor individuale ale corpului (în orice poziție a corpului în spațiu).
Aflați centrul de greutate al următoarelor figuri:

4. Tipuri de echilibru.
A) (diapozitivele 5-8)
Concluzie: Echilibrul este stabil dacă, cu o mică abatere de la poziția de echilibru, există o forță care tinde să-l readucă în această poziție.
Poziția în care energia sa potențială este minimă este stabilă. (diapozitivul 9)
b) Stabilitatea corpurilor situate pe fulcr sau pe fulcrum.(diapozitivele 10-17)

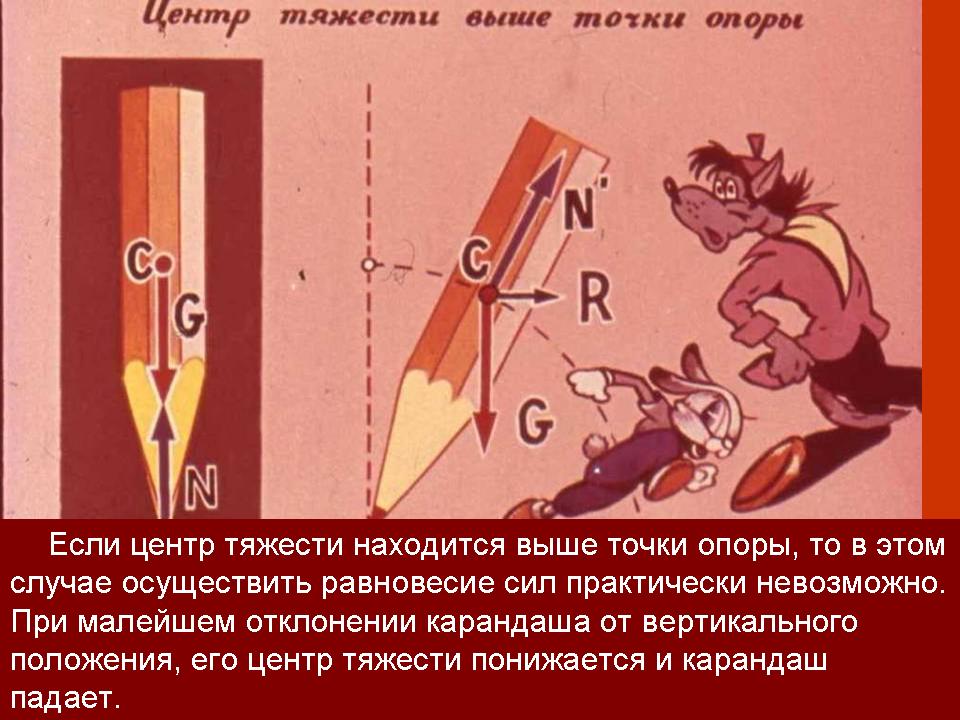
Concluzie: Pentru stabilitatea unui corp situat pe un punct sau linie de sprijin, este necesar ca centrul de greutate să fie sub punctul (linia) de sprijin.
c) Stabilitatea corpurilor pe o suprafață plană.
(diapozitivul 18)
1) Suprafata de sustinere- aceasta nu este întotdeauna o suprafață care este în contact cu corpul (dar una care este limitată de linii care leagă picioarele mesei, trepied)

2) Analiza unui slide din „Lecții și teste electronice”, disc „Munca și putere”, lecția „Tipuri de echilibru”.
Poza 1.
- Cum sunt diferite scaunele? (picior pătrat)
- Care este mai stabil? (cu suprafata mai mare)
- Cum sunt diferite scaunele? (Locația centrului de greutate)
- Care este cel mai stabil? (care centru de greutate este mai jos)
- De ce? (Deoarece poate fi deviat la un unghi mai mare fără a se răsturna)
3) Experienta cu o prisma devianta
- Să punem o prismă cu un plumb pe tablă și să începem să o ridicăm treptat peste o margine. Ce vedem?
- Atâta timp cât plumbul traversează suprafața delimitată de suport, echilibrul se menține. Dar de îndată ce verticala care trece prin centrul de greutate începe să depășească limitele suprafeței de sprijin, biblioteca se răstoarnă.
Analizare diapozitivele 19–22.
![]()
Concluzii:
- Corpul cu cea mai mare zonă de sprijin este stabil.
- Dintre două corpuri de aceeași zonă, corpul al cărui centru de greutate este mai jos este stabil, deoarece poate fi deviat fără a se răsturna la un unghi mare.
Analizare diapozitivele 23–25.

Care nave sunt cele mai stabile? De ce? (Pentru care încărcătura este situată în cale, și nu pe punte)

Ce mașini sunt cele mai stabile? De ce? (Pentru a crește stabilitatea mașinilor la viraj, patul drumului este înclinat în direcția virajului.)
Concluzii: Echilibrul poate fi stabil, instabil, indiferent. Stabilitatea corpurilor este mai mare, cu cât aria de sprijin este mai mare și cu atât centrul de greutate este mai scăzut.
III. Aplicarea cunoștințelor despre stabilitatea corpurilor.
- Ce specialități au nevoie cel mai mult de cunoștințe despre echilibrul corpului?
- Proiectanți și constructori de diferite structuri (cladiri înalte, poduri, turnuri TV etc.)
- Artiști de circ.
- Șoferi și alți profesioniști.
(diapozitivele 28–30)
- De ce Roly-Vstanka revine la poziția de echilibru la orice înclinare a jucăriei?
- De ce Turnul din Pisa este înclinat și nu cade?
- Cum își mențin echilibrul bicicliștii și motocicliștii?
Recomandări ale lecției:
- Există trei tipuri de echilibru: stabil, instabil, indiferent.
- Poziția corpului este stabilă, în care energia sa potențială este minimă.
- Stabilitatea corpurilor pe o suprafață plană este mai mare, cu cât aria de sprijin este mai mare și cu atât centrul de greutate este mai scăzut.
Teme pentru acasă: § 54 – 56 (G.Ya. Myakishev, B.B. Buhovtsev, N.N. Sotsky)
Surse și literatură utilizate:
- G.Ya. Myakishev, B.B. Buhovtsev, N.N. Sotsky. Fizică. Clasa 10.
- Bandă de film „Stability” 1976 (scanată de mine pe un scanner de film).
- Disc „Mișcarea și interacțiunea corpurilor” din „Lecții și teste electronice”.
- Disc „Munca și putere” din „Lecții și teste electronice”.
Tip de echilibru corp solid determinat de acţiunea gravitaţiei în cazul unei abateri arbitrar de mici: a) echilibru indiferent - acţiunea gravitaţiei nu se modifică; b) stabil - readuce întotdeauna corpul în poziția anterioară (există un moment de stabilitate); c) instabil - acţiunea gravitaţiei determină întotdeauna răsturnarea corpului (există un moment de răsturnare); d) limitat-stabil - înaintea barierei de potențial se reface poziția corpului (există un moment de stabilitate), după aceasta corpul se răstoarnă (există un moment de răsturnare).
În mecanica corpului rigid, există trei tipuri de echilibru : indiferent, stabil și instabil. Aceste specii diferă în comportamentul corpului, ușor deviat de la poziția echilibrată. Când corpul unei persoane menține complet o poziție („întărire”), i se aplică legile echilibrului unui corp rigid.
Echilibrul indiferent Este caracteristic că, cu orice abateri, echilibrul este menținut. O minge, un cilindru, un con circular pe un plan orizontal (suport inferior) pot fi rotite după cum doriți și vor rămâne în repaus. . Linia de acțiune a gravitației (G)într-un astfel de corp (sau, după cum se spune, linia gravitațională este mai scurtă) trece întotdeauna prin punctul de sprijin, coincide cu linia de acțiune a forței de reacție a suportului (R); se echilibrează reciproc. În tehnologia sportivă, echilibrul indiferent nu se găsește practic niciodată nici pe uscat, nici în apă.
echilibru durabil caracterizată printr-o revenire la poziţia anterioară cu orice abatere. Este stabil cu o abatere arbitrar mică din două motive; a) centrul de greutate al corpului se ridică mai sus (Dh), se creează o rezervă energie potențialăîn câmpul gravitațional; b) linia gravitațională (G) nu trece prin suport, apare bratul gravitatiei (d) si apare momentul gravitatiei (momentul de stabilitate M gura = Gd), readucerea corpului (cu o scădere a energiei potenţiale) în poziţia anterioară. Un astfel de echilibru se găsește la o persoană cu un suport superior. De exemplu, o gimnastă atârnată pe inele; brațul atârnând liber de articulația umărului. Forța de gravitație a corpului însuși readuce corpul în poziția anterioară.
Echilibru instabil Este caracteristic că o abatere arbitrar mică provoacă o abatere și mai mare și corpul însuși nu poate reveni la poziția anterioară. Aceasta este situația cu suport inferior când corpul are un punct sau linie (marginea corpului) de sprijin. Când corpul deviază: a) centrul de greutate scade sub (-Dh), energia potențială scade în câmpul gravitațional al pământului; b) linia gravitațională (G) cu deviația corpului se îndepărtează de punct de sprijin, umărul crește (d)și momentul gravitației (momentul de răsturnare M def. =Gd ); se abate din ce în ce mai mult corpul de la poziţia anterioară. Echilibrul instabil în natură este practic aproape imposibil.
În exercițiile fizice, un alt tip de echilibru este cel mai des întâlnit atunci când există o zonă de sprijin situată dedesubt (suport inferior) . Cu o ușoară abatere a corpului, centrul său de greutate se ridică (+ Dh) și apare un moment de stabilitate (M gura =Gd). Există semne ale unui echilibru stabil; momentul de greutate al corpului îl va readuce în poziția anterioară. Dar acest lucru continuă doar atunci când este deviat la anumite limite, până când linia gravitațională ajunge la marginea zonei de sprijin. În această poziție, apar deja condiții de echilibru instabil: cu o abatere suplimentară, corpul se răstoarnă; la cea mai mică abatere în sens opus revine la poziţia anterioară. Limita zonei de sprijin corespunde vârfului „barierei potențiale” (energie potențială maximă). În limitele dintre bariere opuse ("gaura potențială") în toate direcțiile, echilibru stabil mărginit .
2.4. Stabilitatea unui corp rigid și sistemele corpului
Stabilitatea unui obiect se caracterizează prin capacitatea acestuia, contracarând dezechilibrul, de a menține poziția. Distingeți indicatorii statici ai stabilității ca abilitatea de a rezista dezechilibrului și dinamici ca abilitatea de a restabili echilibrul.
Indicator static de sustenabilitate un corp rigid servește (într-un echilibru mărginit-stabil) factor de stabilitate . Pe fig. 51, A momentul de răsturnare este creat de forța de răsturnare (F ODA) aplicată pe umăr (h) față de linia de basculare (O), în jurul căreia este deviat corpul. Momentul de stabilitate relativ la aceeași linie de răsturnare ia naștere de la începutul aplicării forței F def. Devine cel mai mare la începutul răsturnării (momentul limită de stabilitate), apoi brațul de greutate G scade și momentul de stabilitate scade la zero (în poziția limită - BCT deasupra liniei de răsturnare).
A- coeficientul de stabilitate al organismului; b, c - unghi de stabilitate (anunț- stabilitatea statica si dinamica a sistemului de corpuri; d - suprafața de rulment (linie întreruptă) și zona efectivă de rulment (umbrită) (original)
Coeficientul de stabilitate este egal cu raportul dintre momentul limită de stabilitate și momentul de răsturnare. Când coeficientul de stabilitate al unui corp în repaus este egal sau mai mare decât unu, nu există răsturnare. Dacă este mai mică de unu, echilibrul nu poate fi menținut.
Cu toate acestea, rezistența doar acestor doi factori mecanici (două momente de forțe) pt sistemele corpului, dacă se poate schimba configurația nu epuizează imaginea reală. Să presupunem că luptătorul care rezistă (Fig. 51, d), îndoindu-și picioarele, coboară centrul de greutate al corpului strict vertical. Din aceasta, nici forța de gravitație a corpului său, nici umărul acestuia și, prin urmare, momentul de stabilitate nu se va schimba. Dar punctul de aplicare F onp va scădea, umărul acestei forțe va scădea, momentul ei va deveni mai mic. In acest fel, luptatorul isi poate creste factorul de stabilitate al corpului prin reducerea momentului de rasturnare. Înclinând corpul înapoi, nu va schimba momentul de răsturnare, ci va crește umărul gravitației corpului său și momentul de stabilitate. Aici câștigă și în stabilitate statică. Luptătorul, încordându-și mușchii și sprijinindu-se pe covor, creează o altă forță orizontală externă (forța de frecare) îndreptată spre el, reducând astfel efectul împingerii răsturnate. Acesta din urmă depinde și de disponibilitatea mușchilor luptătorului de a contracara aplicarea bruscă. Acțiunile frauduloase le pot înrăutăți drastic pregătirea și pot provoca o răsturnare cu forță redusă. Cel mai esențial lucru pentru un sistem biomecanic nu este utilizarea pasivă a gravitației corpului, ci tragerile active ale mușchilor care mențin și schimbă postura corpului. În sistemul corpului, fiecare verigă trebuie să fie în echilibru, menținându-și configurația (postura corpului uman).
În consecință, coeficientul de stabilitate al unui corp și al unui sistem fix de corpuri caracterizează stabilitatea statică ca fiind capacitatea de a rezista la dezechilibru. La oameni, atunci când se determină stabilitatea, trebuie întotdeauna să se țină cont de opoziția activă a tracțiunilor musculare și de disponibilitatea pentru rezistență.
Indicator dinamic de stabilitate corp solid servește unghi de stabilitate . Acesta este unghiul format de linia de acțiune a gravitației și linia dreaptă care leagă centrul de greutate cu marginea corespunzătoare a zonei de sprijin. (vezi fig. 51, b, c).Începem să deviem corpul până când linia gravitațională ajunge la limita zonei de sprijin (poziția la limită a corpului este vârful barierei potențiale). La corp, așezat vertical (Fig. 51, b), baza de sustenabilitate(/i) este mai mică decât cea a aceluiași corp culcat plat (/2) (vezi Fig. 51, în). Aceasta înseamnă că linia gravitațională este mai aproape de limita dincolo de care va începe răsturnarea. Centrul de greutate trebuie ridicat pentru a se rostogoli în primul caz la o înălțime mai mică (Dh 1) decât în al doilea (Dh 2). Unghiul de stabilitate în primul caz (a 1) este clar mai mic decât în al doilea ( a 2).
sens fizic unghiul de stabilitate este că este egal cu unghiul de rotație (<р), на который надо повернуть тело для начала его опрокидывания. Угол устойчивости показывает, в каких пределах еще восстанавливается равновесие. Он характеризует степень динамической устойчивости: если угол больше, то и устойчивость больше. Этот показатель удобен для сравнения степени устойчивости одного тела в разных направлениях (если площадь опоры не круг и линия силы тяжести не проходит через его центр).
Suma a două unghiuri de stabilitate dintr-un plan este considerată ca unghiul de echilibruîn acest plan. Caracterizează marja de stabilitate într-un plan dat, adică determină gama de mișcare a centrului de greutate până la o posibilă răsturnare într-o direcție sau alta (de exemplu, pentru un slalomist când schiează, o gimnastă pe echilibru). grindă, un luptător în poziție în picioare).
În caz de echilibru sistem biomecanic Pentru aplicarea indicatorilor dinamici de stabilitate, este necesar să se țină seama de rafinamente semnificative.
In primul rand, zona de sprijin eficient a unei persoane nu coincide întotdeauna cu suprafața suportului. La o persoană, ca și într-un corp solid, suprafața de sprijin este limitată de linii care leagă punctele extreme de sprijin (sau marginile exterioare ale mai multor zone de sprijin) (vezi Fig. 51, e). Dar la oameni, granița zonei de sprijin efectiv este adesea situată în interiorul conturului suportului, deoarece țesuturile moi (picior desculț) sau verigile slabe (falangele de capăt ale degetelor într-o poziție de mână pe podea) nu pot echilibra sarcină. Prin urmare, linia de basculare este deplasată spre interior de la marginea suprafeței de sprijin, zona de sprijin efectiv este mai mică decât aria suprafeței portante.
În al doilea rând, o persoană nu deviază niciodată cu întregul corp în raport cu linia de răsturnare (ca un cub), ci se mișcă în raport cu axele oricărei articulații, fără a menține complet postura (de exemplu, când sta în picioare - mișcări în articulațiile gleznelor) .
În al treilea rând, atunci când se apropie de poziția de limită, devine adesea dificil să se mențină postura și nu are loc doar răsturnarea „corpului întărit” în jurul liniei de răsturnare, ci o schimbare a posturii cu o cădere. Aceasta diferă semnificativ de deformarea și răsturnarea unui corp rigid în jurul feței de răsturnare (înclinare).
Astfel, unghiurile de stabilitate într-un echilibru stabil mărginit caracterizează stabilitatea dinamică ca fiind capacitatea de a restabili echilibrul. Atunci când se determină stabilitatea corpului uman, este de asemenea necesar să se țină cont limitele zonei de sprijin eficient, fiabilitatea menținerii posturii la poziția de frontieră a corpului și la linia reală de răsturnare.
În exercițiile fizice, se găsește adesea o legătură de ținere (dure). Atunci condițiile de menținere a echilibrului necesită luarea în considerare a conexiunii bidirecționale prin luarea în considerare a forțelor reactive corespunzătoare cauzate de o astfel de conexiune.
3. CONSERVAREA ŞI RESTAURAREA POZIŢIEI CORPULUI UM
O persoană poate nu numai să mențină echilibrul, ci și să-l restabilize în cazuri de încălcare. Diferența dintre echilibrul sistemelor biomecanice și echilibrul corpurilor fizice solide nu constă în prezența unor legi speciale ale mecanicii pentru sistemele vii, ci în utilizarea lor mai complexă datorită particularităților sistemelor vii.
Statica corpului rigid
Statică ia în considerare condițiile de echilibru ale unui corp sau ale unui sistem de corpuri. Dacă asupra unui corp în repaus acționează mai multe forțe, ale căror direcții se intersectează într-un punct, atunci acesta va rămâne în repaus atunci când suma (vectorul) acestor forțe este egală cu zero. Punctul de aplicare a forței poate fi deplasat de-a lungul liniei de acțiune a acesteia.
Centrul de greutate al unui corp rigid sau al unui sistem de corpuri
Gravitația acționează asupra fiecărei particule a corpului. Se numește punctul în care rezultanta forțelor gravitaționale care acționează asupra punctelor individuale ale corpului se numește centrul de greutate. Suma momentelor de greutate ale tuturor particulelor corpului față de centrul de greutate este egală cu zero.
Tipuri de echilibru corporal
Dacă, cu o abatere suficient de mică a corpului de la poziția de echilibru, apar forțe care tind să readucă corpul în poziția inițială, atunci un astfel de echilibru se numește durabil.
De obicei, după acțiunea unor mici perturbații (deplasări, șocuri) asupra unui corp aflat în echilibru stabil, acesta începe să oscileze cu o amplitudine mică în jurul poziției de echilibru; aceste oscilații sunt apoi amortizate prin frecare și echilibrul este restabilit.
În poziția de echilibru stabil, energia potențială a corpului are o valoare minimă (sub acțiunea forțelor conservatoare).
Dacă totuși, cu o abatere arbitrară mică a corpului de la poziția de echilibru, apar forțe care tind să mărească această abatere, atunci o astfel de poziție se numește instabil.
Într-o poziție de echilibru indiferentă, când corpul deviază, nu apar forțe, iar noua poziție este, de asemenea, o poziție de echilibru.
Condiții de echilibru pe un plan înclinat
Pentru a echilibra un corp cu greutatea P, pe un plan înclinat care face un unghi α cu orizontul, trebuie să aplicați o forță F egal cu F 1, și F 1 =P sinα forţă F trebuie îndreptată de-a lungul planului înclinat (Fig. 1). În acest caz, corpul apasă pe un plan înclinat cu o forță F 2 =P sinα, iar planul înclinat acţionează cu aceeaşi forţă asupra corpului culcat pe el. Un corp culcat liber se va sprijini pe un plan înclinat până când forța de rulare devine mai mare decât forța de frecare statică. Acest lucru se va întâmpla când tgα > k, Unde k este coeficientul de frecare static.
Condițiile de egalitate a momentelor de forțe se aplică și echilibrului porții (Fig. 3, a) sau trolii.
Blocuri
Blocul fix (Fig. 3b) servește doar la schimbarea direcției forței care acționează. Blocul mobil (Fig. 3, c) vă permite să obțineți un câștig în forță. Cu un bloc mobil staționar sau care se rotește uniform, suma tuturor forte active iar suma tuturor momentelor de forță este egală cu zero.
De aici rezultă că
Palanul cu lanț (Fig. 4) este un sistem de blocuri mobile și fixe conectate într-un suport comun. Dacă palanul cu lanț are n blocuri mobile și n blocuri fixe, atunci forța F forța de echilibrare P, este egal cu F = P/2n.
În absența frecării, forța P, acționând de-a lungul axei șurubului, este echilibrat de forță F atașat la mâner (Fig. 5):
| Corp | Poziția centrului de greutate |
|---|---|
| tija subțire | În mijlocul tijei |
| Cilindru sau prismă | La mijlocul unei linii drepte care leagă centrele bazelor unui cilindru sau prisme |
| Minge | In centru |
| Segment plat de grosime mică | Pe axa de simetrie, decalat de la bază cu 2/5 din înălțimea acesteia |
| piramidă sau con | Pe segmentul care leagă partea superioară cu centrul bazei; deplasat cu ¼ din acest segment |
| Emisferă | Pe axa de simetrie, decalat față de centru cu 3/8 din rază |
| Placă solidă triunghiulară subțire | În punctul de intersecție a medianelor |





