Vrste kinematičkih parova. Pogledajte šta je "Kinematički par" u drugim rječnicima
Kinematički par je pokretna veza dviju uzastopnih karika koja im osigurava određeno relativno kretanje. Elementi kinematičkog para su skup površina linija ili tačaka duž kojih dolazi do pomične veze dviju karika i koje čine kinematički par. Da bi par postojao, elementi njegovih sastavnih karika moraju biti u stalnom kontaktu T.
Primjer takvog zgloba je zglob kuka. Postoje i zglobovi dva stepena slobode ili jedan stepen slobode. Lanci se zbog svoje pokretljivosti dijele na: krute, normalne i labave. Tvrdi lanac je poseban slučaj Samo ime je na neki način oksimoron. Moramo se nositi s kinematičkim lancem koji se ne kreće! Koristi se u građevinskim konstrukcijama i nije predmet interesovanja u mehanici. Kinematički lanac koji se najčešće koristi je ravan lanac.
U takvom lancu, kretanje jednog elementa utiče na kretanje svih ostalih elemenata sistema. Zatim se primjenjuje slobodni lanac. Primjer slobodnog lanca je mjenjač, mjenjač koji se sastoji od zupčanika u kojima jedan ili više kotača nemaju fiksnu os rotacije.
Podijelite rad na društvenim mrežama
Ako vam ovaj rad ne odgovara, na dnu stranice nalazi se lista sličnih radova. Takođe možete koristiti dugme za pretragu
Predavanje 2
Kakav god da je mehanizam mašine, on se uvek sastoji samo od karika i kinematičkih parova.
Uslovi povezivanja koji se nameću u mehanizmima na pokretnim karikama, u teoriji mašina i mehanizama Uobičajeno je da se nazivaju kinematičkim parovima.
Trenutno se kinematski lanci koriste za opisivanje mnogih složeni sistemi pokret. Ovo se posebno odnosi na robotiku. Na primjer, kretanje manipulatora, odnosno dijela robota koji može obavljati neke funkcije ljudske ruke, opisuje se kao kinematski lanac koji se sastoji od elemenata i pokretnih karika između njih, koji se u robotu spominje u obliku konektora ili šarki. Ali koncept kinematičkog lanca također se koristi u opisivanju kretanja ljudskog tijela. Kinematički lanac je ovdje definiran kao kombinacija nekoliko uzastopnih zglobova koji čine sistem kretanja.
Kinematički parnazivamo pokretnom vezom dviju susjednih karika, osiguravajući im određeno relativno kretanje.
U tabeli. 2.1 prikazani su nazivi, crteži, simboli najčešćih kinematičkih parova u praksi, kao i njihova klasifikacija.
Karike, kada se kombinuju u kinematički par, mogu doći u dodir jedna s drugom duž površina, linija i tačaka.
Obično je ovo običan, jednostavan lanac. Ribnjaci, kao što se ovdje može vidjeti, su kinematski parovi, a kosti su fiksni elementi lanca. Ljudska biomehanika uvodi i podjelu kinematičkih lanaca na otvorene i zatvorene. U zatvorenom krugu njegova krajnja linija nije slobodna. U ljudskom tijelu postoje dvije zatvorene kinematike - grudni koš i karlica. S druge strane, otvoreni kinematički lanac je onaj u kojem je posljednja karika slobodna i spaja se samo na jednu susjednu kariku.
Većina pokreta koje izvode udovi omogućavaju da se mete otvore jer imaju vatrenu ruku ili nogu na krajevima. S druge strane, mnogi radovi su izvedeni ljudsko tijelo takođe zahtevaju uzemljenje. Na primjer, kada se povlači konopac, mišići kuka i tlo ispod stopala mogu se smatrati vrstom zatvorenog kruga koji omogućava da se konopac kreće po tlu.
Elementi kinematičkog paraoni nazivaju skup površina, linija ili tačaka duž kojih se javlja pokretna veza dviju karika i koje čine kinematski par. U zavisnosti od vrste kontakta elemenata kinematičkih parova, postoje sve više i niže kinematičke parove.
Kinematički parovi, formirane elementima u obliku linije ili tačke, nazivaju se viši.
Biokinetički par formira krute krute elemente i zglobove. Stepen slobode naziva se nezavisno kretanje u zglobu, a broj stepeni slobode ukupan broj nezavisnih relativnih kretanja krutog tela. Zakačeno tijelo ima 6 stupnjeva slobode: može izvesti 3 rotirajuća pokreta oko 3 ose i 3 progresivna kretanja duž njih. Ne može imati više od 5 stepeni slobode. Kada je relativno kretanje elemenata manje od 5 stepeni ili 1-3 mm, onda se kombinacija smatra igrom, a ne kinematičkim parom.
Kinematički parovi formirani elementima u obliku površina nazivaju se niže.
Da bi par postojao, elementi njegovih sastavnih karika moraju biti u stalnom kontaktu, tj. biti zatvoren. Zatvaranje kinematičkih parova može bitigeometrijski ili nasilno, Na primjer, uz pomoć vlastite mase, opruga itd.
Klasa kinematičkog para definira broj koji je razlika između maksimalan broj stupnjevi slobode člana i broj stupnjeva slobode datog spoja. Kod ljudi su mogući samo rotacijski pokreti u koštano-zglobnom sistemu. Ovo je rezultat jednosmjernog djelovanja mišića koji može povući, a ne gurnuti. Sferni i acetabularni zglob imaju tri stepena slobode. Biocistični lanac je koherentan skup elemenata povezanih parovima biokinetičkih parova. Krug može biti otvoren ili zatvoren.
O otvorenom lancu govorimo kada je zadnja karika slobodna, to može biti, na primjer, prst. Manipulatori i industrijski roboti najčešće imaju otvoreni kinematički lanac. Ovi lanci se sastoje od nekoliko aktivnih karika koje omogućavaju prostorno kretanje i orijentaciju radnog vrha, odnosno efektora.
Čvrstoća, otpornost na habanje i trajnost kinematičkih parova ovise o njihovoj vrsti i dizajnu. Niži parovi su otporniji na habanje od viših. To se objašnjava činjenicom da se u nižim parovima kontakt elemenata parova javlja duž površine, pa stoga, s istim opterećenjem, u njoj nastaju niži specifični pritisci nego u višem. Habanje, ceteris paribus, proporcionalno je specifičnom pritisku, pa se stoga niži parovi troše sporije od viših. Stoga je, kako bi se smanjilo trošenje strojeva, poželjno koristiti niže parove, međutim, često korištenje viših kinematičkih parova omogućava značajno pojednostavljenje strukturnih dijagrama strojeva, što smanjuje njihove dimenzije i pojednostavljuje dizajn. Stoga je ispravan izbor kinematičkih parova složen inženjerski problem.
Broj stupnjeva slobode je broj varijabilnih pozicija koje se moraju specificirati da bi se jedinstveno odredio prostorni raspored. Da biste odredili broj stupnjeva slobode, koristite formulu. Na osnovu gornje formule određen je broj stupnjeva slobode za nekoliko jednostavnih manipulatora.
Koristeći jednačinu, broj stupnjeva slobode je jednak. Da bi manipulator imao četiri stepena slobode, koristite četiri pogona, kao što je prikazano na sl. Koristite 5 aktuatora, kao što je prikazano na slici 7, da manipulator obavlja određene zadatke.
Kinematički parovi su također podijeljeni pobroj stepena slobode(mobilnost), koje čini dostupnim linkovima povezanim preko njega, ilibroj uslova veze(razred u paru), koju par nameće na relativno kretanje povezanih karika. Kada koriste takvu klasifikaciju, programeri mašina dobijaju informacije o mogućim relativnim pomeranjima veza i o prirodi interakcije faktora sile između elemenata para.
Kako je lako uočiti broj stupnjeva slobode otvorenog kinematičkog lanca, on je jednak broju kinematičkih parova rotirajuće i klizne pete klase. U slučaju kinematičkih parova koji nisu očevi, šablon se mora primijeniti u skladu s tim, ili se moraju zamijeniti svi kinematički parovi s rotirajućim ili kliznim petama.
Postoji nekoliko načina za rješavanje ovog problema: kuglični zglob možete zamijeniti sa tri rotirajuća zgloba bez pomaka ili možete zamijeniti odgovarajući kinematički par za crtež. Kao što možete vidjeti iz DOF proračuna, 6 aktuatora treba primijeniti na pojedinačne komponente kao što je prikazano na sl.
Besplatna veza koja je u opštem slučaju u M - dimenzionalni prostor, dozv P vrste najjednostavnijih pokreta, ima niz stupnjeva slobode! ( H) ili W - pokretno.
Dakle, ako je veza u trodimenzionalnom prostoru, omogućava šest vrsta jednostavnih pokreta - tri rotirajuća i tri translacijska oko i duž osi X, V, Z , onda kažemo da ima šest stupnjeva slobode, ili da ima šest generaliziranih koordinata, ili da je šestokretno. Ako je veza u dvodimenzionalnom prostoru koji omogućava tri vrste jednostavnih pokreta - jednu rotaciju unaokolo Z i dva translatorna duž osi X i Y , onda kažu da ima tri stepena slobode, ili tri generalizovane koordinate, ili da je tropokretna, itd.
Ispod su dijagrami manipulatora sa datim brojem stupnjeva slobode za introspekciju. Kinematičke komponente koje čine kinematički par sa priključenim pogonom, koje omogućavaju kretanje relativnih kinematičkih parova da formiraju blok kretanja.
Kinematički blok manipulatora stvara kinematičkog mehanizma sa priključenim diskovima. Mehanizam mašine za manipulaciju određuje dva kinematička parametra. Pokretljivost - broj stupnjeva slobode kinematičkog lanca imobiliziranog mehanizma - osnova; manevarska sposobnost - broj stupnjeva slobode kinematičkog lanca fiksnog mehanizma: element je baza, a element je posljednji u kinematičkom lancu. Prvi od ovih parametara označava broj veza koje se moraju postaviti na mehanizam da bi se potpuno imobilizirao.
Tabela 2.1
Kada se veze kombinuju korišćenjem kinematičkih parova, one gube stepen slobode. To znači da kinematski parovi nameću veze koje spajaju brojem S.
Ovisno o broju stupnjeva slobode koje veze spojene u kinematički par imaju u relativnom kretanju, odredite mobilnost para ( W = H ). Ako je H broj stupnjeva slobode karika kinematičkog para u relativnom kretanju, to pokretljivost para se određuje na sljedeći način:
Slično, ali nakon dodatne imobilizacije posljednjeg slobodnog elementa, određuje slobodu kretanja mehanizma, kada, na primjer, hvataljka ili alat kinematičke jedinice zauzima točno određeni položaj. Pored sintetičkih parametara kao što su brojevi pokretljivosti i manevarske sposobnosti, mehanizam kinematičke jedinice manipulatora opisuje se njegovim općim geometrijskim svojstvima, odnosno takozvanom kinematičkom strukturom prikazanom za primjer manipulatora na Sl.
Prema konceptu kinematičke strukture, lanac ili mehanizam se definira kao definicija kinematičkog dijagrama u obliku skice, koristeći nazive članova i kinematičke parove. Vrlo često, kada je struktura manipulatora složena, moguće je prikazati kinematičku strukturu u trodimenzionalnom prostoru, kao što je prikazano na Sl. 11 za ilustrovani manipulator prikazan na Sl.
gdje je P - mobilnost prostora u kojem postoji par koji se razmatra; S - broj obveznica nametnutih od strane para.
Treba napomenuti da je mobilnost para W , definisan sa (2.1), ne zavisi od tipa prostora u kome se implementira, već samo od konstrukcije.
Na primjer, rotacijski (translacijski) (vidi tabelu 2.1) par, kako u šesto- i tropokretnom prostoru, i dalje će ostati jednopokretni, u prvom slučaju će mu biti nametnuto 5 veza, au drugom slučaju - 2 obveznice, i tako ćemo imati, respektivno:
Struktura kinematičke jedinice, zajedno sa opisom dimenzija kinematičkog dijagrama i raspona kretanja pokretača, jasno definira kretanje mehanizma i rezultirajuće hvatanje ili kretanje alata. Iz operativnih razloga, ovaj prostor se opisuje nezavisno od dimenzionalne skice i zapreminom. Sljedeća područja su istaknuta u radnom prostoru.
Na primjer, za strukturu manipulatora prikazanu na Sl. 10, glavni radni prostor je prikazan na sl. Radni i kolizioni prostori se dijele na: mehanički i upravljački. Mehanički prostori su izvedeni iz strukturnih svojstava kinematičke jedinice s korelacijama koje proizlaze, na primjer, iz sumiranja u vezama, statičkih i dinamičkih deformacija, itd. ovi prostori su obično veći od nominalnih prostora određenih na osnovu geometrije zupčanika. Kontrolni prostori uključuju kontrolne granice koje se odnose na svojstva sistema za mjerenje pomaka, ograničenja obrade i sam sistem upravljanja, kao što su granice opsega servo kontrole.
za šestokretni prostor:
za tropokretni prostor:
Kao što vidite, mobilnost kinematičkih parova ne zavisi od karakteristika prostora, što je prednost ove klasifikacije. Naprotiv, česta podjela kinematičkih parova na klase pati od činjenice da klasa para ovisi o karakteristikama prostora, što znači da isti par u različitim prostorima ima različitu klasu. Ovo je nezgodno za praktične svrhe, što znači da je takva klasifikacija kinematičkih parova iracionalna, pa je bolje da je ne koristite.
Ovi prostori su obično manji od nominalnih. Odnos zapremine radnog prostora i prelaza ili kolizije određuje ispravnost donete odluke kinematičke jedinice manipulacione mašine, rešenje je bolje, veći deo kolizionog prostora zauzima radni prostor. Kao parametri, koeficijenti su dati izrazima.
Neki od ranih dijagrama manipulatora dobili su raspon kretanja za pojedinačne elemente, a njihovi glavni obrasci detalja su prikazani u nastavku. Saobraćaj je grana privrede koja obuhvata prevoz robe i putnika na različite načine. Infrastruktura Transportni objekti.
Moguće je izabrati takav oblik elemenata para, tako da jednim nezavisnim elementarnim kretanjem nastane drugi - zavisni (derivat). Primjer takvog kinematičkog para je vijak (tabela 2. 1) . U ovom paru, rotacijsko kretanje vijka (matice) uzrokuje njegovo translacijsko kretanje duž osi. Takav par treba pripisati jednom pokretnom, jer se u njemu ostvaruje samo jedan nezavisni najjednostavniji Pokret.
Na selu. Opća upotreba. Upotreba prema dolje. Tehnika - materijalni alati ljudske aktivnosti. Spušta ljude na posao, čini ih manjim. Najizdašnija je tehnika proizvodnje. Transport. Sportsko obrazovanje i kultura.
Mehanizam je sistem tijela u kojem se kretanje jednog ili više tijela pretvara u pravilno kretanje drugih tijela. Mašina - mehanički pokretni uređaj za pretvaranje energije, materijala ili informacija. Cilj je olakšati fizički ili mentalni rad osobe.
Kinematske veze.
Kinematički parovi dani u tabeli. 2.1, jednostavan i kompaktan. Oni implementiraju gotovo sva najjednostavnija relativna kretanja karika potrebnih za stvaranje mehanizama. Međutim, pri stvaranju strojeva i mehanizama oni se rijetko koriste. To je zbog činjenice da velike sile trenja obično nastaju na mjestima dodira karika koje čine par. To dovodi do značajnog trošenja elemenata para, a time i do njegovog uništenja. Stoga se najjednostavniji kinematički lanac s dvije karike kinematičkog para često zamjenjuje dužim kinematičkim lancima, koji zajedno ostvaruju isto relativno kretanje karika kao i kinematski par koji se zamjenjuje.
Prema prirodi potrošnje, automobili se dijele na. Energetska mašina je mašina koja se koristi za pretvaranje energije bilo koje vrste u mehaničku energiju i obrnuto. Ako se bilo koja energija pretvara u mehaničku, onda su takve mašine motori. Ako od mehaničkog do bilo kojeg - generatora.
Radna mašina je mašina koja koristi mehanička energija iz motora ili drugog izvora energije za pretvaranje materijala. Radne mašine se dele na: Tehnološki transport. Informacijske mašine - informacije o procesu. Kibernetičke mašine - modifikacija ili simulacija ulaza mehanizama, fizioloških i bioloških procesa, svojstvenih čoveku i prirodi. Karakteriziraju ga elementi umjetne inteligencije.
Kinematički lanac dizajniran da zamijeni kinematičku paru naziva se kinematička veza.
Navedimo primjere kinematičkih lanaca, za najčešće u praksi rotacijske, translacijske, spiralne, sferne i ravan-ravninske kinematičke parove.
Iz tabele. 2.1 može se vidjeti da je najjednostavniji analog rotacijskog kinematičkog para ležaj s kotrljajućim elementima. Isto tako, kotrljajne vodilice zamjenjuju linearni par i tako dalje.
Instrumenti - uređaji koji se koriste za mjerenje fizičke veličine, procesi upravljanja, automatizacija upravljanja i regulacije. Mehanizmi su kombinacija pokretnih dijelova koji mijenjaju jedan pokret za potreban pokret drugih. čvrste materije. Kada se tekućina zamijeni promjenom kretanja, to su hidraulički mehanizmi u kojima je plin pneumatski.
Glavni motor motora unutrašnjim sagorevanjem je mehanizam kliznog zamašnjaka koji kliznu klipnjaču pretvara u rotirajuću radilicu. Najvažniji mehanizam kompresora pretvara rotaciono kretanje radilice u klizno kretanje klipa.
Kinematske veze su pogodnije i pouzdanije u radu, izdržavaju mnogo veće sile (momente) i omogućavaju mehanizmima da rade pri velikim relativnim brzinama karika.
Glavne vrste mehanizama.
Mehanizam se može posmatrati kao poseban slučaj kinematički lanac u kojem je barem jedna karika pretvorena u stalak, a kretanje preostalih karika određeno je određenim kretanjem ulaznih karika.
Posebnosti kinematičkog lanca, koji predstavlja mehanizam, su mobilnost i sigurnost kretanja njegovih karika u odnosu na stalak.
Mehanizam može imati nekoliko ulaznih i jednu izlaznu vezu, u kom slučaju se naziva mehanizam za sabiranje, i obrnuto, jedan ulaz i nekoliko izlaznih veza, tada se naziva diferencirajući mehanizam.
Mehanizmi se dijele navodilice i prenos.
prenosni mehanizamnaziva se uređaj dizajniran za reprodukciju datog funkcionalnog odnosa između kretanja ulaznih i izlaznih veza.
mehanizam za vođenjeoni nazivaju mehanizam u kojem se putanja određene tačke veze koja formira kinematičke parove samo sa pokretnim karikama poklapa sa datom krivom.
Razmotrite glavne vrste mehanizama koji su našli široku primjenu u tehnologiji.
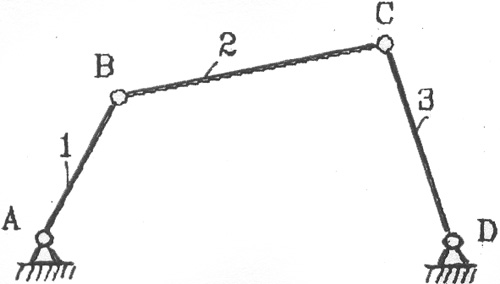
Mehanizmi, čije karike čine samo donje kinematičke parove, nazivaju sezglobna poluga. Ovi mehanizmi se široko koriste zbog činjenice da su izdržljivi, pouzdani i jednostavni za rukovanje. Glavni predstavnik ovakvih mehanizama je zglobna četverokraka (slika 2.1).
Nazivi mehanizama obično su određeni nazivima njihovih ulaznih i izlaznih veza ili karakterističnom karikom uključenom u njihov sastav.
Ovisno o zakonima kretanja ulaznih i izlaznih karika, ovaj mehanizam se može nazvati klackalica, dvostruka klackalica, dvostruka klackalica, klackalica.
Zglobna četverokraka koristi se u mašinogradnji, izradi instrumenata, kao iu poljoprivrednim, prehrambenim, snježnim i drugim mašinama.

Ako, na primjer, zamijenimo rotacijski par u zglobnoj četverokraki D , na translaciju, onda dobijamo dobro poznati mehanizam klizača radilice (slika 2.2).
Rice. 2.2. Različite vrste mehanizama radilice:
1 radilica 2 - klipnjača; 3 - klizač
Mehanizam radilica-klizač (slider-crank) našao je široku primenu u kompresorima, pumpama, motorima sa unutrašnjim sagorevanjem i drugim mašinama.
Zamjena rotacijskog para u zglobnoj četverokraki OD translacijski, dobijamo preklopni mehanizam (slika 2.3).
Na p i c .2.3, u mehanizmu klackalice se dobija od zglobne četverokrake zamjenom rotacijskih parova u njemu C i O za progresivne.
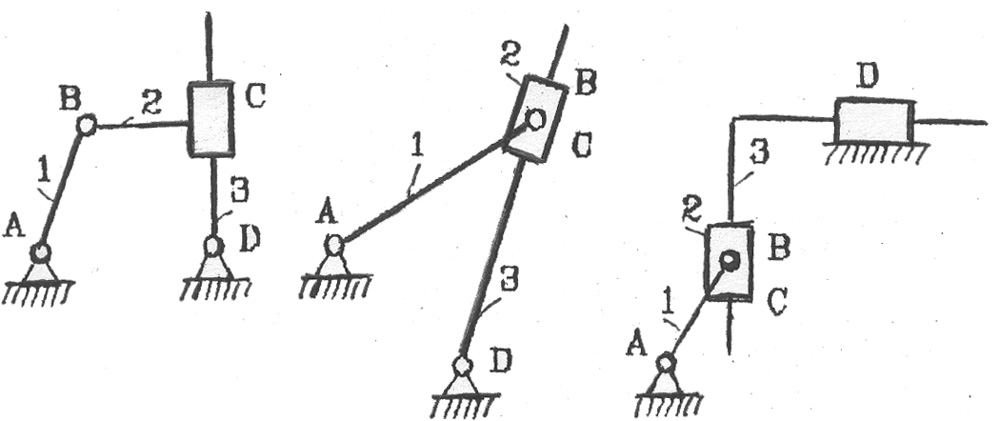
Mehanizmi za klackanje našli su široku primjenu u blanjalicama zbog svoje inherentne osobine asimetričnosti radnog i idle move. Obično imaju dug radni hod i brz hod u praznom hodu koji osigurava povratak rezača u prvobitni položaj.
Rice. 2.3. Različite vrste klackalica:
1 ručica; 2 kamena; 3 krila.
Mehanizmi sa šarkom su našli veliku upotrebu u robotici (slika 2.4).
Posebnost ovih mehanizama je da imaju veliki broj stepena slobode, što znači da imaju mnogo pokreta. Koordinirani rad pogona ulaznih karika osigurava kretanje hvataljke po racionalnoj putanji i do zadanog mjesta u okolnom prostoru.
Široka primjena u inženjerstvubregasti mehanizmi. Uz pomoć grebenastih mehanizama, strukturno je najlakši način da se postigne gotovo svako pomicanje vođene karike prema datom zakonu,
Trenutno postoji veliki broj varijeteti zupčastih mehanizama, od kojih su neki prikazani na sl. 2.5.

Potreban zakon kretanja izlazne karike bregastog mehanizma postiže se davanjem odgovarajućeg oblika ulaznoj karici (bregasti). Gredica može obavljati rotaciju (slika 2.5, a, b ), translacijski (Sl. 2.5, c, g ) ili složeno kretanje. Izlazna veza, ako napravi translacijsko kretanje (slika 2.5, a, in ), koji se naziva potiskivač, a ako se ljulja (slika 2.5, G ) - rocker. Za smanjenje gubitaka trenja u višem kinematičkom paru AT koristite dodatni valjak (slika 2.5, G).
Grebenasti mehanizmi se koriste kako u radnim mašinama tako iu raznim vrstama komandnih uređaja.
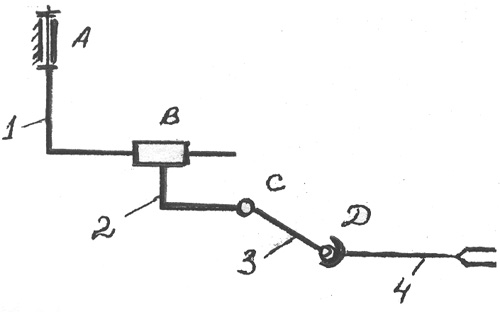
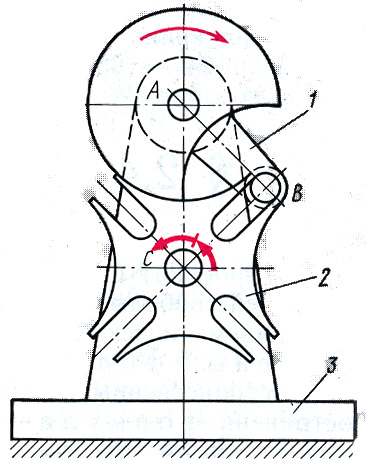
Vrlo često se u mašinama za rezanje metala, presama, raznim instrumentima i mjernim uređajima koriste vijčani mehanizmi, od kojih je najjednostavniji prikazan na sl. 2.6:
Rice. 2.6 Vijčani mehanizam:
1 - vijak; 2 - matica; A, B, C - kinematički parovi
Vijčani mehanizmi se obično koriste tamo gdje je potrebno rotacijsko kretanje pretvoriti u međuzavisno translacijsko kretanje ili obrnuto. Međuzavisnost kretanja uspostavlja se pravilnim odabirom geometrijskih parametara vijčanog para AT .
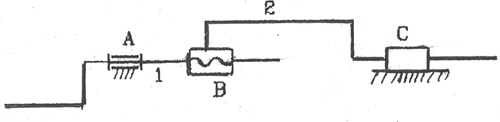
Klin mehanizmi (slika 2.7) se koriste u različite vrste steznih uređaja i učvršćenja kod kojih je potrebno stvoriti veliku izlaznu silu sa ograničenim ulaznim silama. Posebnost ovih mehanizama je jednostavnost i pouzdanost dizajna.
Mehanizmi u kojima se prijenos kretanja između dodirujućih tijela vrši zbog sila trenja nazivaju se frikcioni. Najjednostavniji trokraki frikcioni mehanizmi prikazani su na sl. 2.8

Rice. 2.7 Klinasti mehanizam:
1, 2 - karike; L, V, C - kinematičke gozbe.

Rice. 2.8 Mehanizmi trenja:
a - frikcioni mehanizam sa paralelnim osovinama; b - frikcioni mehanizam sa osama koje se ukrštaju; in - frikcioni mehanizam zupčanika; 1 - ulazni valjak (točak);
2 izlazni valjak (točak); 2" - šina
Zbog činjenice da su linkovi 1 i 2 pričvršćeni jedno na drugo, duž linije kontakta između njih, nastaje sila trenja koja vuče pogonsku kariku zajedno sa sobom 2 .
Frikcioni zupčanici se široko koriste u uređajima, trakama, varijatorima (mehanizmi sa glatkom kontrolom brzine).
Za prijenos rotaciono kretanje prema datom zakonu, između osovina se koriste različite vrste zupčanika sa paralelnim, ukrštajućim i ukrštajućim osovinama mehanizama . Uz pomoć zupčanika moguće je prenijeti kretanje i između osovina safiksne osovine, tako sa kretanje u prostoru.
Mehanizmi zupčanika se koriste za promjenu frekvencije i smjera rotacije izlazne veze, zbrajanje ili razdvajanje pokreta.

Na sl. 2.9 prikazani su glavni predstavnici zupčanika sa fiksnim osovinama.
Slika 2.9. Zupčanici sa fiksnim osovinama:
a - cilindrična; b - konusni; u - kraj; g - stalak;
1 - zupčanik; 2 - zupčanik; 2 * šina
Manji od dva zupčanika se zove oprema i još mnogo toga - zupčanik.
Zupčanik je poseban slučaj zupčanika u kojem je polumjer zakrivljenosti jednak beskonačnosti.

Ako zupčanik ima zupčanike sa pokretnim osovinama, oni se nazivaju planetarni (slika 2.10):
Planetarni zupčanici, međutim, u poređenju sa zupčanicima fiksne osovine, omogućavaju prijenos veće snage i prijenosnih odnosa s manjim brojem stupnjeva prijenosa. Oni se također široko koriste u stvaranju mehanizama za sumiranje i diferencijale.
Prijenos kretanja između osa koje se sijeku vrši se pomoću pužnog zupčanika (slika 2.11).

Pužni zupčanik se dobiva iz prijenosa s navrtkom uzdužno sečenjem matice i preklapanjem dvaput u međusobno okomitim ravninama. Pužni zupčanik ima svojstvo samokočenja i omogućava vam da implementirate velike omjere prijenosa u jednoj fazi.
Rice. 2.11. pužni zupčanik:
1 - puž, 2 - pužni točak.
Mehanizmi zupčanika s prekidnim kretanjem također uključuju malteški križni mehanizam. Na sl. Z-L "2. prikazuje mehanizam četvorokrakog "malteškog krsta".
Mehanizam "malteškog križa" pretvara kontinuiranu rotaciju vodeće ravnomjerne - ručice 1 s fenjerom 3 u isprekidanu rotaciju "križa" 2, fenjer 3 ulazi u radijalni žlijeb "križa" bez udara 2 i okreće ga do ugla gde z je broj žljebova.
Za izvođenje kretanja samo u jednom smjeru koriste se začepni mehanizmi. Na slici 2.13 prikazan je čegrtaljki mehanizam, koji se sastoji od klackalice 1, začepnog točka 3 i papučica 3 i 4.

Prilikom zamaha klackalice 1 psa za ljuljanje 3 daje rotaciju začepnom točku 2 samo kada se klackalica pomera suprotno od kazaljke na satu. Da držim volan 2 od spontane rotacije u smjeru kazaljke na satu kada se klackalica pomiče u odnosu na sat, koristi se papučica za zaključavanje 4 .
Malteški i čegrtaljki mehanizmi se široko koriste u alatnim mašinama i instrumentima,
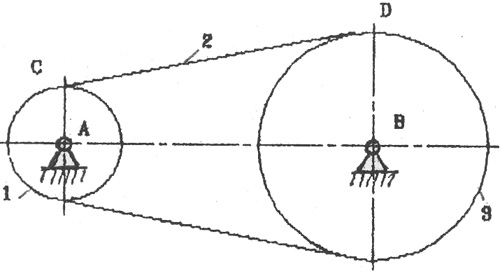
Ako je potrebno prenijeti na relativno velika udaljenost mehanička energija od jedne tačke u prostoru do druge, zatim se koriste mehanizmi sa fleksibilnim karikama.
Pojasevi, užad, lanci, konci, trake, kuglice itd. koriste se kao fleksibilne karike koje prenose kretanje s jednog mehanizma na drugi,
Na sl. 2.14 prikazuje blok dijagram najjednostavnijeg mehanizma sa fleksibilnom vezom.
Zupčanici sa fleksibilnim karikama se široko koriste u mašinstvu, izradi instrumenata i drugim industrijama.
Najtipičniji jednostavni mehanizmi su razmatrani gore. mehanizmi su dati iu posebnoj literaturi, pa-sertifikatima i priručnicima, npr.
Strukturne formule mehanizama.
Postoje opći obrasci u strukturi (strukturi) različitih mehanizama koji povezuju broj stupnjeva slobode W mehanizam sa brojem karika i brojem i vrstom njegovih kinematičkih parova. Ovi obrasci se nazivaju strukturne formule mehanizama.
Za prostorne mehanizme trenutno je najčešća Malyshevova formula čije je izvođenje slijedeće.
Pustite mehanizam sa m karike (uključujući stalak), - broj jedno-, dvo-, tro-, četvero- i petokretnih parova. Označimo broj pokretnih veza. Kad bi sve pokretne veze bile slobodnih tela, ukupan broj stepena slobode bi bilo 6 n . Međutim, svaki par u pokretu V klasa nameće relativno kretanje karika koje formiraju par, 5 veza, svaki par koji se kreće po dva IV klasa - 4 veze, itd. Dakle, ukupan broj stepeni slobode, jednak šest, biće smanjen za iznos
gdje je pokretljivost kinematičkog para, broj parova čija je pokretljivost jednaka i . Ukupan broj superponiranih veza može uključivati određeni broj q redundantne (ponovljene) veze koje dupliciraju druge veze bez smanjenja mobilnosti mehanizma, već ga samo pretvaraju u statički neodređen sistem. Stoga je broj stupnjeva slobode prostornog mehanizma, koji je jednak broju stupnjeva slobode njegovog kinematičkog lanca koji se kreće u odnosu na stalak, određen sljedećom Malyshev formulom:
ili stenografski
(2.2)
za mehanizam statički određen sistem, za - statički neodređen sistem.
U opštem slučaju, rešenje jednačine (2.2) je težak problem, pošto je nepoznato W i q ; dostupna rješenja su složena i ne razmatraju se u ovom predavanju. Međutim, u posebnom slučaju, ako W , jednak broju generaliziranih koordinata mehanizma, pronađenih iz geometrijskih razmatranja, iz ove formule možete pronaći broj redundantnih veza (vidi Reshetov L. N. Dizajniranje racionalnih mehanizama. M., 1972)
(2.3)
i riješiti problem statičke odredivosti mehanizma; ili, znajući da je mehanizam statički određen, pronaći (ili provjeriti) W.
Važno je napomenuti da strukturne formule ne uključuju veličine karika, pa se u strukturnoj analizi mehanizama može pretpostaviti da su bilo koje (u određenim granicama). Ako nema redundantnih veza (), montaža mehanizma se odvija bez deformacije karika, čini se da se potonje samopodešavaju; stoga se takvi mehanizmi nazivaju samousklađujućim. Ako postoje suvišne veze (), tada montaža mehanizma i kretanje njegovih karika postaju mogući samo kada su potonje deformirane.
Za ravne mehanizme bez redundantnih karika strukturnu formulu nosi ime P. L. Čebiševa, koji ga je prvi predložio 1869. za polužne mehanizme sa rotacionim parovima i jednim stepenom slobode. Trenutno je formula Čebiševa proširena na sve ravne mehanizme i izvedena je uzimajući u obzir prekomjerna ograničenja kako slijedi
Pustiti ravan mehanizam sa m karika (uključujući stalak), - broj pomičnih karika, - broj nižih parova i - broj viših parova. Kada bi sve pokretne karike bile slobodna tijela koja se kreću u ravnini, ukupan broj stupnjeva slobode bio bi jednak 3 n . Međutim, svaki niži par nameće dvije veze na relativno kretanje karika koje čine par, ostavljajući jedan stepen slobode, a svaki viši par nameće jednu vezu, ostavljajući 2 stepena slobode.
Broj superponiranih veza može uključivati određeni broj redundantnih (ponovljenih) veza čije eliminiranje ne povećava mobilnost mehanizma. Prema tome, broj stupnjeva slobode ravnog mehanizma, odnosno broj stupnjeva slobode njegovog pokretnog kinematičkog lanca u odnosu na stalak, određen je sljedećom Čebiševljevom formulom:
(2.4)
Ako je poznato, ovdje možete pronaći broj redundantnih veza
(2.5)
Indeks "p" se odnosi na činjenicu da mi pričamo o idealno ravnom mehanizmu, tačnije o njegovoj ravnoj shemi, budući da je zbog nepreciznosti u proizvodnji ravan mehanizam u određenoj mjeri prostoran.
Prema formulama (2.2)-(2.5) vrši se strukturna analiza postojećih mehanizama i sinteza strukturnih dijagrama novih mehanizama.
Strukturna analiza i sinteza mehanizama.
Utjecaj redundantnih priključaka na performanse i pouzdanost strojeva.
Kao što je gore spomenuto, s proizvoljnim (u određenim granicama) veličinama karika, mehanizam sa redundantnim vezama () ne može se sastaviti bez deformiranja karika. Stoga ovakvi mehanizmi zahtijevaju povećanu preciznost izrade, inače se u procesu montaže karike mehanizma deformišu, što uzrokuje opterećenje kinematičkih parova i karika značajnim dodatnim silama (pored onih osnovnih spoljne sile, za čiji prijenos je mehanizam namijenjen). Uz nedovoljnu preciznost u izradi mehanizma s prekomjernim karikama, trenje u kinematskim parovima može se uvelike povećati i dovesti do zaglavljivanja karika, stoga su, s ove točke gledišta, prekomjerne veze u mehanizmima nepoželjne.
Što se tiče redundantnih karika u kinematičkim lancima mehanizma, pri projektovanju mašina treba ih eliminisati ili ostaviti na minimum ako se njihovo potpuno eliminisanje pokaže neisplativo zbog složenosti konstrukcije ili iz nekih drugih razloga. U općem slučaju treba tražiti optimalno rješenje, uzimajući u obzir dostupnost potrebne tehnološke opreme, troškove proizvodnje, potrebni vijek trajanja i pouzdanost stroja. Stoga je ovo vrlo težak zadatak za svaki konkretan slučaj.
Na primjerima ćemo razmotriti metodologiju za određivanje i eliminaciju suvišnih karika u kinematičkim lancima mehanizama.
Neka je ravni mehanizam sa četiri karike sa četiri jednokretna rotirajuća para (slika 2.15, a ) zbog nepreciznosti u proizvodnji (na primjer, zbog neparalelnosti osi A i D ) se pokazalo prostornim. Montaža kinematičkih lanaca 4 , 3 , 2 i zasebno 4 , 1 ne izaziva poteškoće, već bodova B , B može se postaviti na osu X . Međutim, sastaviti rotacijski par AT , formirana vezama 1 i 2 , to će biti moguće samo kombinovanjem koordinatnih sistema Bxyz i B x y z , što zahtijeva linearni pomak (deformaciju) tačke B veza 2 duž x-ose i ugaone deformacije veze 2 oko x i z osi (prikazano strelicama). To znači da u mehanizmu postoje tri redundantne veze, što potvrđuje i formula (2.3): . Da bi ovaj prostorni mehanizam bio statički odrediv, potrebna je njegova druga strukturna shema, na primjer, prikazana na sl. 2.15, b , gdje će se montaža takvog mehanizma odvijati bez zatezanja, od poravnanja tačaka B i B biće moguće pomeranjem tačke OD u cilindričnom paru.
Moguća je varijanta mehanizma (slika 2.15, in ) sa dva sferna para (); U ovom slučaju, osimosnovna mobilnostpojavljuje se mehanizamlokalna mobilnost- mogućnost rotacije klipnjače 2 oko svoje ose Ned ; ova pokretljivost ne utiče na osnovni zakon kretanja mehanizma i čak može biti korisna u smislu izravnavanja habanja šarki: klipnjača 2 tokom rada mehanizma, može se rotirati oko svoje ose zbog dinamičkih opterećenja. Formula Malysheva potvrđuje da će takav mehanizam biti statički određen:

Rice. 2.15
Najjednostavniji i efikasan metod eliminacija redundantnih veza u mehanizmima uređaja - upotreba višeg para sa tačkastim kontaktom umesto veze sa dva niža para; stupanj pokretljivosti ravnog mehanizma u ovom slučaju se ne mijenja, jer, prema Čebiševovoj formuli (at):
Na sl. 2.16, a, b, c dat je primjer eliminacije suvišnih karika u zupčastom mehanizmu s progresivno pomičnim guračem valjka. Mehanizam (slika 2.16, a ) - četverovezni (); osim glavne mobilnosti (rotacija brega 1
) postoji lokalna pokretljivost (nezavisna rotacija okruglog cilindričnog valjka). 3
oko svoje ose) Shodno tome, . Ravna shema nema redundantne veze (mehanizam je sastavljen bez smetnji). Ako se zbog nepreciznosti u izradi mehanizam smatra prostornim, onda s linearnim kontaktom valjka 3 sa ekscentrom 1 prema Malyshev formuli na , dobivamo, ali pod određenim uvjetom. Kinematički par cilindar - cilindar (sl. 2.16, 6
) kada je relativna rotacija karika nemoguća 1 , 3 oko z-ose bio bi tročlani par. Ako se takva rotacija, zbog nepreciznosti u izradi, dogodi, ali je mala, a linearni kontakt je praktički očuvan (pod opterećenjem kontaktna površina je u obliku pravokutnika), onda je ovo 
kinematički par će biti četvoropokretan, dakle, i
Sl.2.17
Smanjenje klase najvišeg para pomoću valjka u obliku bačve (petokretni par sa tačkastim kontaktom, sl. 2.16, in ), dobijamo za i - mehanizam je statički određen. Međutim, treba imati na umu da linearni kontakt karika, iako zahtijeva povećanu točnost proizvodnje, omogućava prijenos većeg opterećenja od kontakta u tački.
Na slici 2.16, d, e dat je još jedan primjer eliminacije suvišnih veza u zupčaniku sa četiri karike (, kontakt zuba kotača 1, 2 i 2, 3 - linearni). U ovom slučaju, prema formuli Čebiševa, - ravna šema nema redundantne veze; prema formuli Malysheva, mehanizam je statički neodređen, stoga će biti potrebna visoka točnost izrade, posebno kako bi se osigurala paralelnost geometrijskih osa sva tri kotača.
Zamjena zubaca 2 na bačvastom obliku (sl. 2.16, d ), dobijamo statički određen mehanizam.
Kinematički par pokretna konjugacija dve čvrste karike, namećući ograničenja na njihovo relativno kretanje uslovima komunikacije. Svaki od uslova veze eliminiše jedan stepen slobode ,
odnosno mogućnost jednog od 6 nezavisnih relativnih kretanja u prostoru. U pravougaonom koordinatnom sistemu moguća su 3 translatorni pokreti(u smjeru 3 koordinatne ose) i 3 rotacijske (oko ovih osa). Prema broju uslova komunikacije S K. p. podijeljeni su u 5 klasa. Broj stepeni slobode K. p. W=6-S. Unutar svake klase, K. stavke su podijeljene na tipove prema preostalim mogućim relativnim kretanjima veza. Prema prirodi kontakta karika, razlikuju se niži K. p. - s kontaktom duž površina, i viši - s kontaktom duž linija ili u tačkama. Stavke višeg K. moguće su za svih 5 klasa i više tipova; niže - samo 3 klase i 6 vrsta ( sl.1
). Također se pravi razlika između geometrijski zatvorenih i nezatvorenih k.p. pirinač. jedan
), i drugo, potrebna je sila pritiska za zatvaranje, tzv. prisilno zatvaranje (na primjer, u zupčastom mehanizmu). Uobičajeno, pokretne spojnice s nekoliko međukotrljajućih elemenata (na primjer, kuglični i valjkasti ležajevi) i sa srednjim deformabilnim elementima (na primjer, tzv. šarke bez zazora uređaja s ravnim oprugama) nazivaju se k. pirinač. 2
). N. Ya. Niberg.
Veliki sovjetska enciklopedija. - M.: Sovjetska enciklopedija. 1969-1978 .
Pogledajte šta je "Kinematički par" u drugim rječnicima:
Povezivanje 2 karike mehanizma, omogućavajući njihovo relativno kretanje. Kinematički par, u kojem se karike dodiruju na površini, naziva se donji (na primjer, rotacijski zglob, translacijski klizač i vodilica). Kinematički par, ... ... Veliki enciklopedijski rječnik
kinematičkog para- par Veza dve susedne karike, omogućavajući njihovo relativno kretanje. [Zbirka preporučenih termina. Broj 99. Teorija mehanizama i mašina. Akademija nauka SSSR. Komitet za naučnu i tehničku terminologiju. 1984] Teorija tema ... ... Priručnik tehničkog prevodioca- kinematinė pora statusas T sritis fizika atitikmenys: angl. kinematski par vok. kinematisches Elementenpaar, n rus. kinematski par, f pranc. paire cinématique, f … Fizikos terminų žodynas
Povezivanje dve susedne veze, omogućavajući im da budu povezani. saobraćaja. Površine, linije, tačke na koje veza može doći u kontakt sa drugom vezom, tzv. elementi veze. K. p. dijele se na niže (kontaktne površine) i više ... ... Veliki enciklopedijski politehnički rječnik
kinematičkog para- kinematski par Spoj dva kruta tijela mehanizma, omogućavajući njihovo dato relativno kretanje. Šifra IFToMM: 1.2.3 Odjeljak: OPŠTI POJMOVI TEORIJE MEHANIZAMA I MAŠINA ... Teorija mehanizama i mašina
par- kinematski par; par Veza dviju uzastopnih karika, koja omogućava relativno kretanje od njih. par sila; par sistem dva paralelne sile, jednake apsolutne vrijednosti i usmjerene u suprotnim smjerovima ...
top par- Kinematički par u kojem se potrebno relativno kretanje karika može dobiti samo dodirom njegovih elemenata duž linija i u tačkama... Politehnički terminološki rječnik





