Određivanje stepena pokretljivosti. Strukturna analiza i sinteza mehanizama. Vrste assur grupa II klase
2 Strukturna analiza i sinteza mehanizama
2.1 Određivanje broja stupnjeva slobode kinematičkog lanca
Kao što je gore navedeno, broj ulaznih karika za transformaciju kinematičkog lanca u mehanizam mora biti jednak broju stupnjeva slobode ovog kinematičkog lanca.
Broj stupnjeva slobode kinematičkog lanca u ovom slučaju znači broj stupnjeva slobode pokretnih karika u odnosu na stalak (karika uzeta kao fiksna). Međutim, sam stalak u stvarnom prostoru može se pomicati.
Ekvivalentna komunikacijska mobilnost Ovlašteno Ovlašteno Zabranjeno Ovlašteno Ovlašteno Ovlašteno. Serija kombinacija kugličnog i kliznog zgloba. Napomene: Serijsko spajanje ima prednost u zamjeni lomljive kontaktne točke ili tipa linije s tehnološki zanimljivijom kontaktnom površinom, jer smanjuju pritisak i time poboljšavaju pouzdanost veze. Ako je mobilnost dozvoljena svakom elementarnom vezom, dolazi do pojave interne mobilnosti dijela sadržanog u serijskoj vezi.
Na primjer, svako nepomično tijelo na Zemlji ima nulti stepen slobode, ali u svemirskom prostoru svijeta, zajedno sa Zemljom, kreće se koristeći svih šest stupnjeva slobode. Drugi primjer: kinematički lanac koji leži u osnovi klipni motor, ima jedan stepen slobode u odnosu na stalak (veza uzeta u studiji za fiksnu, koja se sastoji od cilindra pričvršćenog za kućište radilice i okvira ili karoserije automobila, motocikla ili druge mašine), iako sam stalak takođe se kreće kada se automobil kreće.
To može biti rotacija ili translacija bez izazivanja pomicanja drugih dijelova. Koristeći prethodni primjer o paralelnim vezama za pretraživanje i povezivanje. Dakle, za razliku od serijske veze, veza koja uključuje nekoliko elementarnih veza koje se nalaze paralelno jedna s drugom smanjuje količinu mobilnosti između dva dijela. Ovo potiskivanje stepena pokretljivosti vrši se prenošenjem mehaničkih dejstava između dva snažna, zbog postojanja određenih komponenti prenošenog torzora, s obzirom da: - ova pokretljivost je zabranjena u translaciji duž ose odgovara ne -nula vrijednost komponente ključne komponente zbroja. - Pokretljivost je zabranjena rotacija oko ose kao rezultat nenulte vrijednosti vremenske komponente ključnog elementa duž ove ose.
Međutim, bez obzira da li se stroj kreće ili ne, priroda kretanja karika klipnog motora u odnosu na stalak ostaje nepromijenjena.
Hajde da uvedemo sljedeću notaciju:
k je broj karika kinematičkog lanca
p 1 - broj kinematičkih parova prve klase u datom lancu
p 2 - broj parova druge klase
p 3 - broj parova treće klase
Veza je izostatična ako je broj nepoznatih pridruženog torzora koji se prenosi jednak. Referenca je neodređena ako broj nepoznanica prenesenog ključa premašuje. Broj jednačina predviđenih osnovnim principom. Diploma primijenjenog inženjerstva 11.
U nastavku nudi dvije opcije koristeći elementarne karike paralelne sa zakretnom. Veza je prstenasta linearna karika ose, karika je os ose rotacije. Određuje statički zavoj linije. Odredite stepen hiperstatizma veze. U kinematičkoj studiji, definirajte torzor ekvivalentan dvije veze paralelno i. i hiperstatične nepoznanice. kinematička veza ekvivalentna dvije veze i. tako da je veza ekvivalentna dvije veze izostatična pivot veza, nudi nekoliko mogućih modifikacija veze, a veza ostaje nepromijenjena.
p 4 - broj parova četvrte klase
p 5 je broj parova pete klase.
Ukupan broj stupnjeva slobode k slobodnih veza smještenih u prostoru je 6k. U kinematičkom lancu oni su povezani u kinematičke parove (tj. veze su superponirane na njihovo relativno kretanje).
Osim toga, kao mehanizam koristi se kinematički lanac sa stalkom (karika uzeta kao fiksna). Stoga će broj stupnjeva slobode kinematičkog lanca biti jednak ukupan broj stupnjevi slobode svih karika minus ograničenja nametnuta njihovom relativnom kretanju:
Statičke veze torza i imaju. Dijagram povezivanja izgleda ovako: Statički moment: Po osnovnom principu statike, to pokazuje. Kinematička deformacija: koristeći zakon sastava kinematičkih tora, dobijamo.
Kretanje postoji između i svih veza. Hyperstatism and Mobility: Writing Relationships. Jednako broju kinematičkih nepoznanica koje ne zavise od ekvivalentne veze. Dio ima unutarnju pokretljivost u mehanizmu ako može imati kretanje koje ne uzrokuje pomicanje drugih dijelova mehanizma. Dakle, ekvivalentan odnos.
W=6k– ∑ S i
Broj veza koje nameću svi parovi klase I jednak je njihovom broju, jer svaki par prve klase nameće jednu vezu na relativno kretanje karika povezanih u takav par; broj veza koje nameću svi parovi klase II jednak je njihovom udvostručenom broju (svaki par druge klase nameće dvije veze) itd.
Α = α2 β = β2 γ = γ1 γ 2 ekvivalenta. Imajte na umu da je ova lakoća izrade djelomično nadoknađena složenijim mehanizmom. Složenost je obično uzrokovana uvođenjem međukomponenti u nizu u vezama kako bi se povećao broj stupnjeva slobode. Pazite da površine koje se spajaju budu u kontaktu. Dakle, tačno poznavanje teorije zavrtnja svake karike, što omogućava procenu.
Izostatski dizajn vodi postavljanje tačne pozicije dijela u odnosu na druge. ispravan pritisak između kontaktnih površina. Primjer: izostatičko pozicioniranje Kelvin U ovom položaju se koristi, na primjer, za okretanje kupola, izostatičko i potpuno spajanje između dijelova i izvodi se pomoću paralelne kombinacije sljedeće tri veze:: priključna tačka.: prstenasta linearna veza, čija osa prolazi kroz centar.
Svih šest stepeni slobode su oduzeti od linka, uzeti kao fiksni (šest veza je superponirano na stalak). Na ovaj način:
S 1 = p 1, S 2 = 2p 2, S 3 = 3p 3, S 4 = 4p 4, S 5 = 5p 5, S stalak \u003d 6,
i zbir svih veza
∑ S i =p 1 +2p 2 +3p 3 +4p 4 +5p 5 +6.
Rezultat je sljedeća formula za određivanje broja stupnjeva slobode prostornog kinematičkog lanca:
Ravan koju formiraju os kružne linearne veze i tačka kontakta priključne tačke. Međutim, neodređeni mehanizam je često rigidniji od izostatskog mehanizma, što je također faktor u tačnosti položaja dijela u odnosu na drugi. Oni koji obezbeđuju i pozicioniranje i održavanje kontakta u prostoriji.
Njegovi nosači spadaju u dvije kategorije. Prikazani odnosima u paralelnoj studiji, tako dobiveni ekvivalentni odnos između radnog komada i jedinice za obradu je izostatičan i potpun. Proučite održavanje kontakta osiguranog zavrtnjima.
W=6k–p 1 –2p 2 –3p 3 –4p 4 –5p 5 –6.
Grupisanjem prvog i poslednjeg člana jednačine dobijamo:
W=6(k–1)–p 1 –2p 2 –3p 3 –4p 4 –5p 5 ,
ili konačno:
W=6n–p 1 –2p 2 –3p 3 –4p 4 –5p 5 ,
gdje je n broj pokretnih karika kinematičkog lanca.
Ova jednačina se zove strukturnu formulu opšti kinematički lanac.
Formulu je prvi put (u malo drugačijem obliku) dobio P.I. Somov 1887. godine, a razvio A.P. Malyshev 1923. Stoga se često naziva formulom Somov-Malyshev. U nekim se udžbenicima naziva formula Malysheva - prema autorstvu konačne verzije.
Neka djeluje na spiralno mehaničko djelovanje, mogu se odrediti poznate statičke nepoznate reference. Povezivanje radnog komada sa procesnom jedinicom preko vijka uključuje sledeće dve serijske veze: tačka spajanja osovine, primenjene licence u mašinstvu 20. Odrediti teoriju vijčanog ekvivalenta povezivanja ova dva serijska kanala. Prema tome, ekvivalentna veza između sklopa i radnog komada s uređajem za držanje je labava veza.
Ovaj uređaj za držanje kontakata ne dodaje nikakve statičke nepoznate već unesenim vezama za pozicioniranje dijelova. Stoga je ekvivalentni odnos s vezama dio-sklop uvijek izostatičan. Općenito, ekvivalentan odnos između dvoje čvrste materije držač kontakta koji ne obezbeđuje relativno pozicioniranje čvrstih čestica treba da bude labav spoj. Takav odnos omogućava da se ne poveća stepen hiperstatizma koji je već postignut odnosima relativnog pozicioniranja dvoje čvrste materije.
p 1 - broj jednokrećućih parova (tj. kinematičkih parova koji pružaju jedan stepen slobode u relativnom kretanju),
p 2 je broj parova koji se pokreću, itd.
Odnosno, indeks u ovom slučaju ne pokazuje broj veza, već broj stupnjeva slobode, a u formuli se zamjenjuju oznake p 1 i p 5, kao i p 2 i p 4. Stoga je pri korištenju raznih udžbenika potrebno pažljivo pratiti interpretaciju autora, jer se, nažalost, često različitih autora Ista oznaka ima različita značenja. Kao rezultat toga, sa istom notacijom, iste formule imaju različite oblike.
Kontinuirani krug je zatvoren. U slučaju zatvorenog kontinuiranog lanca koji se sastoji od čvrstih tijela sastavljenih uzastopno pomoću karika, graf veze izgleda ovako: zatvoreni neprekidni lanac naziva se i jednostavan lanac ili petlja. Takođe je pokazano da je stepen pokretljivosti m zatvorenog neprekidnog lanca: m = 6n - gs, gde je m broj nezavisnih kinematičkih nepoznanica zatvorenog kontinuiranog lanca. Ovaj odnos nam omogućava da izračunamo stepen hiperstatizma, znajući stepen mobilnosti. Kinematsko istraživanje.
Takođe se može reći da je stepen pokretljivosti zatvorenog kontinuiranog lanca broj nezavisnih kinematičkih nepoznanica koje se moraju fiksirati da bi se odredile sve ostale. Razmotrite mehanizam za upravljanje štapom pomoću ekscentra. Predložite rješenje kako bi ovaj mehanizam bio izostatičan. Da biste dodali ova tri torza, oni moraju biti izraženi u istoj tački.
Manipulatori i industrijski roboti koriste otvorene (otvorene) kinematičke lance. U takvim lancima, broj pokretnih karika jednak je ukupnom broju kinematičkih parova:
n=p 1 +2p 2 +3p 3 +4p 4 +5p 5 ,
W=6(p 1 +2p 2 +3p 3 +4p 4 +5p 5)–p 1 -2p 2 -3p 3 -4p 4 -5p 5 ,
ili konačno:
W=5p 1 +4p 2 +3p 3 +2p 4 +p 5 .
Dakle, broj stupnjeva slobode otvorenog kinematičkog lanca jednak je zbiru pokretljivosti (stepena slobode) kinematičkih parova uključenih u ovaj lanac. Pored stepena slobode, na kvalitet rada manipulatora i industrijskih robota u velikoj meri utiče i njihova manevarska sposobnost.
Primijenjena diploma mašinstva 25. Napomena. Ova relacija omogućava izračunavanje stepena hiperstatizma, znajući stepen pokretljivosti složenog lanca. Mobilna čeljust ima klizni priključak. Primijenjena licenca u mašinstvu 26. Zaključak Hiperstatski nepoznati mehanizmi se određuju iz statičke studije.
Recimo: bez obzira na ovaj mehanizam. njegov stepen hiperstatizma. Da li dimenzionalni i ugaoni uslovi relativnog položaja karika odgovaraju? Ovih šest jednačina su nezavisne. Otuda i stepen pokretljivosti lanca. Vlasnik primijenjene licence u mašinstvu 27.
Upravljivost je broj stupnjeva slobode manipulatora sa fiksnim hvatom. Određuje sposobnost manipulatora (industrijskog robota) da zaobiđe prepreke i izračunava se po sljedećoj formuli:
gdje je M manevarska sposobnost manipulatora.
Kao što je gore navedeno, značajan broj mehanizama koji se koriste u praksi su ravni mehanizmi (odnosno, bazirani su na ravnim kinematičkim lancima). Postavljanje kinematičkog lanca u ravan nameće tri opšta ograničenja na kretanje svih karika ovog lanca, tako da k slobodnih karika postavljenih u ravan ima ukupno 3k stepena slobode.
Ovaj stepen mobilnosti odgovara tri komponente. Kretanje iz. KOMUNIKACIJE KOMISIJE EVROPSKOM PARLAMENTU, SAVJETU, EVROPSKOM EKONOMSKO-SOCIJALNOM KOMITETU I KOMITETU REGIONA. Evropska strategija mobilnosti s niskim emisijama.
Mobilnost sa niskim emisijama je važan element u ukupnoj tranziciji na niskougljičnu kružnu ekonomiju koja je potrebna Evropi da bi ostala konkurentna i zadovoljila potrebe mobilnosti ljudi i robe. Transport čini gotovo četvrtinu emisija stakleničkih plinova u Evropi; takođe je glavni uzrok zagađenja vazduha u gradovima. Odgovor Evrope na ove izazove je nepovratan pomak ka mobilnosti s niskom emisijom ugljika i zagađivačima zraka. Emisije zagađujućih materija u zrak koje su štetne po naše zdravlje moraju se odmah smanjiti.
Ako se pokaže da je kinematički lanac, koji u skladu s formulom Čebiševa ima nulti stupanj slobode, pomičan, to znači da u ovom lancu postoje pasivne (prekomerne) karike. Prilikom proučavanja mehanizma u ovom slučaju, veze koje stvaraju pasivne veze jednostavno se uklanjaju iz razmatranja.
Slika 4a prikazuje kinematičku shemu mehanizma elipsografa (W=3 ⋅ 3 – 2 ⋅ 4 = 1). Ima sljedeća svojstva: tačke A i B kreću se translatorno duž X i Y osi kao da pripadaju klizačima 1 i 3.
Prelazak na mobilnost s niskim emisijama već je počeo na globalnom nivou i ubrzava se. Ovo daje velike mogućnosti. To omogućava evropskim proizvođačima automobila da se modernizuju, aktivno promovišu nove tehnologije i povrate povjerenje potrošača. To je također prilika za druge industrije i proizvođače da održe globalne standarde i izvoze svoje proizvode. Također pruža priliku inovativnim energetskim kompanijama i pružaocima usluga, kao i investitorima, da promoviraju održivi rast i otvore nova radna mjesta.
U ovom slučaju, tačka M opisuje elipsu sa malom poluosom koja je jednaka segmentu AM i koja se nalazi duž Y ose, a sa velikom poluosom BM koja se nalazi duž X ose (tj. elipsa produžena duž X ose); tačka N opisuje elipsu sa malom poluosom BN i velikom poluosom AN, produženom duž Y ose.
Tačka C (sredina segmenta AB) opisuje "elipsu" sa jednakim poluosama, tj. krug. Ako je neka karika 5 spojena šarkama na fiksnu tačku O (početak koordinata) i na bilo koju tačku na linku AB (na primjer, na tačku N - slika 4b), onda dobijamo fiksni sistem (truss):
Njegov trenutni tempo bi trebao biti ubrzan kroz postojeću strategiju mobilnosti sa niskim emisijama, istovremeno pružajući mobilnost potrebnu za efikasno domaće tržište i globalnu povezanost. To će zahtijevati širok spektar aktivnosti. Akcionim planom utvrđene su radnje koje Komisija namjerava da preduzme, u skladu sa principima i procesima za unapređenje zakonodavstva, kako bi se osiguralo da sve predložene mjere budu činjenične, efikasne, efikasne, proporcionalne i da u potpunosti poštuju princip supsidijarnosti.
W = 3 ⋅ 4 – 2 ⋅ 6 = 0.
Međutim, ako je karika 5 pričvršćena sa drugom šarkom za vezu AB u tački C (slika 4c), tada kretanje tačke C koja pripada karici 5 i kretanje tačke C koja pripada linku AB postaju koordinirane - obe tačke se kreću duž istu putanju (duž kruga poluprečnika OC).
U ovom jedinom konkretnom slučaju, kinematički lanac postaje pomičan (formula ne može „predvidjeti“ takvo poseban slučaj- daje rezultat za opći slučaj odgovarajuće kombinacije karika i kinematičkih parova). U ovom slučaju, veza 5 nameće pasivnu (prekomernu) vezu, a ova veza se može zanemariti prilikom proučavanja mehanizma.
Zbog automobilski transport odgovoran za više od 70% emisija gasova staklene bašte iz transporta i veći deo zagađenja vazduha, ovo je oblast na koju će napori biti fokusirani, ali svi transportni sektori mogu i treba da daju svoj doprinos. Kroz svoje inicijative, EU će stvoriti povoljno okruženje i pružiti snažne poticaje za mobilnost s niskim emisijama. Mjere najavljene u ovoj komunikaciji dio su holističkog pristupa koji zahtijeva dugoročnu uključenost svih dionika, uključujući države članice, od kojih će se tražiti da daju doprinos u skladu sa svojim odgovornostima.
Prisustvo pasivnih karika može se utvrditi konstruisanjem nove pozicije datog kinematičkog lanca sa nultim (ili negativnim) stepenom slobode za iste veličine karika. Ako je kolo izgrađeno na drugim pozicijama, ima pasivne veze. Ako se dimenzije ne uklapaju u novu poziciju, onda je to zaista fiksni sistem - rešetka (sa negativnim brojem stupnjeva slobode - rešetka je statički neodređena).
Istraživači, proizvodni i uslužni sektori u Evropi moraju nastaviti da inoviraju i donose svoje strateške odluke sa ciljem iz sredine stoljeća. Trebat će im pravi poticaji i ulaganja u pravo vrijeme kako bi svoje inovacije iznijeli na tržište u Evropi i svijetu. Regije i gradovi će također biti važni igrači u pronalaženju rješenja za mobilnost s niskim emisijama gdje se izazovi najbolje osjećaju, a na kraju će izbor spola za mobilne korisnike odrediti koliko smo uspješni.
Samo hvala trajna akcija Od svih učesnika, Evropa će biti u stanju da uspešno transformiše svoj transportni sistem, koji je ključan za njen prosperitet i dobrobit njenih građana. Regulatorni okvir za mobilnost niske emisije.
Dodatni stepeni slobode - ako mehanizam ima kretanje bilo koje karike koje ne utiče na kretanje ostalih karika ovog mehanizma, onda daje dodatni stepen slobode.

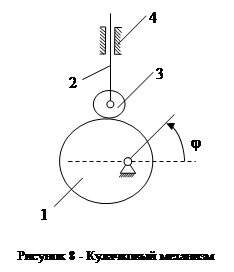
Obično se dodatni stepen slobode formira u prisustvu okruglog valjka. Rotirajući oko svoje ose, ne menja prirodu kretanja preostalih karika.
Slika 5a prikazuje mehanizam sa nekružnim valjkom - ovdje će položaj potiskača 2 ovisiti ne samo o položaju grebena, već i o položaju valjka. To jest, mehanizam zaista ima dva stepena slobode. U mehanizmu na slici 5b valjak je okrugao i njegov kut rotacije ne utječe na položaj potiskača - položaj potiskača je u potpunosti određen položajem brega.
Dakle, u stvari, mehanizam ima jedan efektivni stepen slobode (rotacija valjka oko sopstvene ose formalno daje drugi stepen slobode, ali to kretanje ne utiče na kretanje preostalih karika mehanizma).
Kada istražujete mehanizam, zgodno je osloboditi se dodatnog stepena slobode. Da biste to učinili, potrebno je zamijeniti praktični profil teorijskim - ekvidistantnim profilom koji prolazi kroz središte valjka, a valjak ukloniti iz razmatranja (slika 5c).
Određivanje stepena pokretljivosti mehanizma
Određivanje stepena pokretljivosti prostornog kinematičkog lanca
Neka imamo n karika od kojih je kinematički lanac sastavljen. Dok se karike ne povežu u kinematičke parove, svaka od njih ima šest stupnjeva slobode (stepena slobode). Stoga su sve karike prije spajanja u kinematički lanac imale 6n stupnjeva pokretljivosti. Nakon sklapanja karika u kinematički lanac, dobićemo kinematičke parove različitih klasa (različitih stupnjeva pokretljivosti). Pretpostavimo da naš kinematski lanac ima kinematičke parove svih pet klasa. Prihvatamo sljedeću notaciju:
P 5 - broj kinematičkih parova pete klase u kinematičkom lancu koji smo formirali,
R 4 - broj kinematičkih parova četvrte klase,
P 3 - broj kinematičkih parova treće klase,
P 2 - broj kinematičkih parova druge klase,
P 1 - broj kinematičkih parova prve klase.
Svaki kinematički par ograničava kretanje karika, oduzima im onoliko stupnjeva slobode koliko je njegova klasa. Svaki kinematički par 5. klase bira 5 stupnjeva slobode iz karika. Svi parovi pete klase biće oduzeti od karika 5P 5 stepeni slobode, četvrte klase - 4P 4, trećeg - 3P 3, drugog - 2P 2, prvog - 1P 1. Ako od ukupnog broja stepeni slobode karika 6n oduzmemo sve izgubljene stepene slobode, dobićemo broj stepeni slobode kinematičkog lanca W:
W \u003d 6n-5P 5 -4P 4 -3P 3 -2P 2 -1P 1. (jedan)
Stepen pokretljivosti mehanizma Uobičajeno je da se naziva broj nezavisnih koordinata koje je izuzetno važno postaviti za određivanje položaja karika mehanizma u koordinatnom sistemu kruto spojenih na stalak.
Mehanizam se razlikuje od kinematičkog lanca po tome što ima jednu kariku potpuno fiksiranu. Fiksna veza je izgubila svih šest stepeni slobode. Dakle, broj pokretnih karika u mehanizmu je n-1. Zamjenom broja pokretnih karika n-1 u formulu (1) dobijamo formulu za određivanje stepena pokretljivosti mehanizma:
W=6(n-1)-5P 5 -4P 4 -3P 3 -2P 2 -1P 1 . (2)
Formulu (2) je prvi dobio Malyshev za prostorne mehanizme.
Razmotrite formulu Malysheva za određivanje stupnja pokretljivosti ravnih mehanizama. Sve karike ravnog mehanizma mogu imati tri stepena pokretljivosti, a kinematski parovi, respektivno, mogu imati 1 ili 2 stepena pokretljivosti. Ako se planarni kinematički parovi razmatraju po klasama, onda su oni samo pete i četvrte klase. Istovremeno, izuzetno je važno uzeti u obzir da je ukupan broj stepeni slobode svih karika ravnog mehanizma 3 (n-1). Parovi pete klase gube dva stepena pokretljivosti, četvrti - jedan. Dakle, stepen mobilnosti ravnog mehanizma mora se odrediti formulom:
W=3(n-1)-2P 5 -P 4 . (3)
Formulu (3) za određivanje stepena pokretljivosti ravnog mehanizma prvi je dobio P. L. Čebišev.
Uzimajući u obzir zavisnost broja opštih uslova odnosa nametnutih mehanizmu, mehanizmi se dijele na porodice.
Familije mehanizama i njihove strukturne formule prikazane su u tabeli 1.
Tabela 2.1 Strukturne formule različitih porodica mehanizama

Razmotrimo primjenu strukturne formule P. L. Čebiševa na konkretnom primjeru. Slika 5 prikazuje zglobnu četverokraku.
1e- veza- ručica- urezuje rotaciono kretanje oko ose O ( puni okret);
2e- karika AB - klipnjača - vrši ravnoparalelno kretanje;
3e- BC veza - klackalica (ili balansir) - vrši povratno rotaciono kretanje oko C ose ( nepotpuni promet);
4e- OS link - stalak (krevet) - fiksna veza.
Broj veza n=4. Kinematički parovi: 4-1, 1-2, 2-3, 3-4. Imamo 4 jednokrevetna para 5 th klasa. Relativno kretanje svih karika je ravno. Mehanizam je ravan. Određujemo stepen njegove mobilnosti prema formuli Chebyshev P. L.:
W=3(n-1)-2P 5 -P 4 =3(4-1)-2×4-0=1.
Mehanizam ima stepen pokretljivosti jednak 1. To znači da je dovoljno postaviti jednu koordinatu na bilo koju kariku mehanizma u koordinatnom sistemu koji je kruto povezan sa okvirom kako bi se odredile pozicije svih ostalih karika. Na primjer, u našem slučaju dovoljno je podesiti kut rotacije poluge j 1 .
 Pasivne veze i redundantne veze
Pasivne veze i redundantne veze
Karike i kinematički parovi, koji ne utiču na prirodu kretanja mehanizma u celini, nazivaju se suvišne (ekstra) veze i parovi, a njima uslovljene veze nazivaju se pasivne veze.
Prilikom određivanja stepena pokretljivosti mehanizma, višak karika i kinematičkih parova ne treba uzeti u obzir.
U složenim štapnim mehanizmima nije uvijek moguće odrediti stupanj pokretljivosti na oko. U ovim slučajevima izuzetno je važno koristiti formulu Čebiševa.
 Definirajmo W mehanizma dvostrukog paralelograma (slika 6). Ovdje AB=BC=KM=MN; AN || BM || CK; AN=BM=CK i AC || K.N. Sa takvim odnosom karika, mehanizam ima W = 1, odnosno dovoljno je postaviti poziciju karike 1 za ugao j 1 da bi se odredile pozicije svih ostalih karika. Ako fiksirate vezu 1 u bilo kojoj poziciji, tada će preostale veze biti nepomične. Definiramo W po Čebiševovoj formuli. Broj karika - n = 5, kinematičkih parova 5 th klasa P 5 = 6, broj kinematičkih parova četvrte klase - P 4 \u003d 0.
Definirajmo W mehanizma dvostrukog paralelograma (slika 6). Ovdje AB=BC=KM=MN; AN || BM || CK; AN=BM=CK i AC || K.N. Sa takvim odnosom karika, mehanizam ima W = 1, odnosno dovoljno je postaviti poziciju karike 1 za ugao j 1 da bi se odredile pozicije svih ostalih karika. Ako fiksirate vezu 1 u bilo kojoj poziciji, tada će preostale veze biti nepomične. Definiramo W po Čebiševovoj formuli. Broj karika - n = 5, kinematičkih parova 5 th klasa P 5 = 6, broj kinematičkih parova četvrte klase - P 4 \u003d 0.
W=3(n-1)-2P 5 -P 4 =3(5-1)-2×6-0=0.
Ako je W=0, onda ne bi trebao postojati mehanizam, već kruta farma. Vidimo da mehanizam može izvršiti kretanje. U slučaju da u ovaj mehanizam mentalno uklonite vezu 5 (ili 2), tada će priroda kretanja preostalih karika ostati nepromijenjena. Mehanizam se pretvara u običnu četiri kariku, W za koju smo već odredili - W=1. Kada se karika 5 eliminiše, istovremeno se eliminišu 2 kinematička para: 5-1, 5-3. Stoga su u ovom mehanizmu jedna karika i dva kinematička para suvišni.
 Razmotrimo još jedan primjer - Marcusov mehanizam, koji se često koristi kao pogon za pokretni transporter (slika 7). Broj veza n=6. Kinematički parovi: 6-1, 1-2, 2-3, 2-4, 3-4, 3-6, 4-5, 5-6 sve pete klase P 5 = 8, P 4 = 0 .
Razmotrimo još jedan primjer - Marcusov mehanizam, koji se često koristi kao pogon za pokretni transporter (slika 7). Broj veza n=6. Kinematički parovi: 6-1, 1-2, 2-3, 2-4, 3-4, 3-6, 4-5, 5-6 sve pete klase P 5 = 8, P 4 = 0 .
Definiramo W po Čebiševljevoj formuli:
W=3(n-1)-2P 5 -P 4 =3(6-1)-2×8-0=-1.
Prema šemi mehanizma, može se vidjeti da će raditi i W=1.
Neka ne postoji direktna veza veza 2-3. Karike 3, 4, 5 će i dalje zauzeti poziciju koja odgovara kutu rotacije j 1 karike 1, pošto karike 1, 2, 4 moraju biti fiksirane pod tim uglom. Isto se može dobiti ako se ukloni kinematički par 2-4 ili 4-3. Ovdje je jedan kinematički par suvišan. Može se zanemariti. onda:
Š=3(6-1)-2×7=1.
Istovremeno, napominjemo da eliminacija veze podrazumijeva eliminaciju nekih kinematičkih parova.
Hostovan na ref.rf
Eliminacija kinematičkih parova (prekid kontakta karika) ne povlači za sobom neizbježno eliminaciju karika uključenih u njega.
Povezivanje linkova, gdje su spojene 3 ili više veza, obično se naziva čvor. U čvoru je jedan kinematički par manje od veza.
 Višak kinematičkih parova i karika nameće dodatne uslove za tačnost izrade mehanizma, međutim, uprkos tome, ponekad se u mehanizam uvodi pasivna karika ili dodatna veza kako bi se dobile dodatne potrebne kvalitete; povećanje snage, smanjenje trenja itd.
Višak kinematičkih parova i karika nameće dodatne uslove za tačnost izrade mehanizma, međutim, uprkos tome, ponekad se u mehanizam uvodi pasivna karika ili dodatna veza kako bi se dobile dodatne potrebne kvalitete; povećanje snage, smanjenje trenja itd.
Odredimo W bregastog mehanizma prikazanog na slici 2.8. Ovdje su karike 1 - bregasta, 2 - potiskivač, 3 - valjak, 4 - stalak. Broj veza n=4. Kinematički parovi 1-4, 2-4, 2-3 pete klase i 3-1 - najviši ravni kinematički par 4 th klasa.
Kada se zupčanik zakrene za ugao j, potiskivač će zauzeti određeni položaj. Na prvi pogled W=1. Definiramo W po Čebiševljevoj formuli:
Š=3(4-1)-2×3-2=2.
Ovdje postoji dodatni stepen mobilnosti. Ako je valjak čvrsto fiksiran potiskom, tada bi W mehanizma bio jednak jedan. Rotacija valjka u odnosu na ostale karike nema efekta. Ugao rotacije valjka je dodatni stepen slobode mehanizma.
Dodatni stepen slobode Uobičajeno je da se takav stepen slobode u kretanju nekih karika naziva, čije uklanjanje ne uzrokuje promjene u prirodi kretanja drugih karika iz kinematičkih razloga.
Ovo se odnosi na apsolutno ili relativno kretanje veze. Eliminacija dodatnog stepena slobode ne povlači za sobom eliminaciju veze.
Prije upotrebe Čebiševljeve formule, izuzetno je važno mentalno isključiti pasivna ograničenja i dodatne stupnjeve slobode iz razmatranja.
Formula Čebiševa općenito daje tačan odgovor. U opštim slučajevima, pasivne veze i dodatni stepeni slobode ne postoje i postoje samo u posebnim slučajevima.
Na primjer: mehanizam dvostrukog paralelograma je poseban slučaj istog mehanizma kada veze nisu paralelne (slika 9a); Marcusov mehanizam je poseban slučaj mehanizma kada se ose zglobnih spojeva karika 2, 4 ne poklapaju (slika 9b); okrugli valjak je konkretniji slučaj geometrijskog oblika valjka okruglog oblika(Slika 9c).
Dakle, formula Čebiševa omogućava identifikaciju karakteristike(posebno) mehanizama.
Određivanje stepena pokretljivosti mehanizma - pojam i vrste. Klasifikacija i karakteristike kategorije "Određivanje stepena pokretljivosti mehanizma" 2014, 2015.





