Vrste kinematičkih parova i njihov kratak opis
Fizičke veličine i mjerne jedinice,
Koristi se u mehanici
| Fizička količina | Jedinica mjerenja | ||
| Ime | Oznaka | Ime | Oznaka |
| Dužina Masa Vreme Ravan ugao Pomeranje tačke Linearna brzina Ugaona brzina Linearno ubrzanje Ugaona ubrzanja Frekvencija rotacije Gustina materijala Moment inercije Sila Moment sile Obrtni moment Rad Kinetička energija Snaga | L, l, r m T, t a, b, g, d S u w a e n r J F, P, Q, G M T A E N | Metar Kilogram Drugi radijan, Stepen Metar Metar u sekundi Radijan u sekundi Metar u sekundi kvadratni Radijan po sekundi kvadratni Okret u minuti Kilogram po kubnom metru Kilogram metar kvadratni Njutn Njutn metar Njutn metar Joule Joule Watt | m kg s rad, α 0 m m / s rad / s, 1 / s m / s 2 rad / s 2, 1 / s 2 o/min kg / m 3 kg. m 2 N (kg. m / s 2) Nm Nm J \u003d Nm J W (J / s) |
STRUKTURA I KLASIFIKACIJA MEHANIZAMA
Struktura mehanizma
Mehanizmi uključuju čvrsta tela koji se zovu linkovi. Karike možda nisu čvrste (na primjer, kaiš). Tečnosti i gasovi u hidrauličkim i pneumomehanizmima ne smatraju se karika.
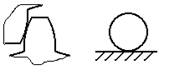
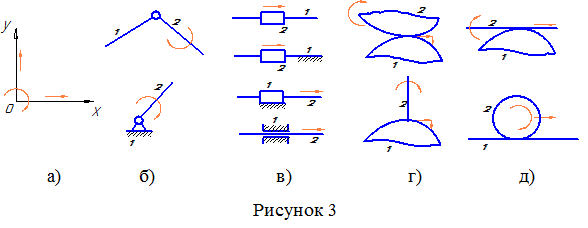
Uvjetni prikaz karika na kinematičkim dijagramima mehanizama reguliran je GOST-om. Primjeri slika nekih veza prikazani su na sl. 1.1.
Rice. 1.1. Primjeri slika veza
na kinematičkim dijagramima mehanizama
Linkovi se dešavaju:
– unos(lideri) - njihova prepoznatljiva karakteristika je to elementarni rad sile koje se na njih primjenjuju su pozitivne (rad sile se smatra pozitivnim ako se smjer sile poklapa sa smjerom kretanja točke njene primjene ili ispod oštar ugao Njoj);
– vikendom(slave) - elementarni rad sila koje se na njih primjenjuju je negativan (rad sile se smatra negativnim ako je smjer sile suprotan smjeru kretanja tačke njene primjene);
– mobilni;
– nepomičan(krevet, stalak).
Na kinematičkim dijagramima veze su označene arapskim brojevima: 0, 1, 2 itd. (vidi sliku 1.1).
Pokretna veza dviju susjednih karika naziva se kinematičkog para. Omogućava mogućnost kretanja jedne karike u odnosu na drugu.
Klasifikacija kinematičke parove
1. Po elementima veze veza kinematski parovi su podijeljeni:
- za više(dostupne su, na primjer, u zupčanicima i zupčastim mehanizmima) - karike su povezane jedna s drugom duž linije ili u tački:
– niže- povezivanje karika međusobno se dešava na površini. Zauzvrat, niža jedinjenja se dijele:
za rotaciju
progresivan
cilindrični
|
sferni
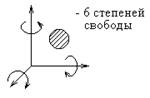
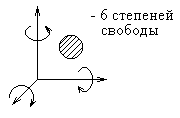
2. Po broju superponiranih veza. Tijelo, koje se nalazi u prostoru (u kartezijanskom koordinatnom sistemu X, Y, Z) ima 6 stepeni slobode. Može se kretati duž svake od tri ose X, Y i Z, kao i rotirati oko svake ose (slika 1.2). Ako tijelo (karika) formira kinematski par sa drugim tijelom (karicom), onda gubi jedan ili više od ovih 6 stupnjeva slobode.
Prema broju stupnjeva slobode koje tijelo gubi (link), kinematički parovi se dijele u 5 klasa. Na primjer, ako su tijela (karike) koja su formirala kinematski par izgubila po 5 stupnjeva slobode, ovaj par se naziva kinematičkim parom 5. klase. Ako se izgube 4 stepena slobode - 4. klasa itd. Primjeri kinematičkih parova različitih klasa prikazani su na sl. 1.2.
 Rice. 1.2. Primjeri kinematičkih parova različitih klasa
Rice. 1.2. Primjeri kinematičkih parova različitih klasa
Na strukturnoj i konstruktivnoj osnovi kinematičke parove možemo podijeliti na rotacijske, translacijske, sferne, cilindrične itd.
Kinematički lanac
Formira se nekoliko karika međusobno povezanih kinematičkim parovima kinematičkog lanca.
Kinematički lanci su:
zatvoreno
otvoren
Do iz kinematičkog lanca nabavi opremu, potrebno:
- učiniti jednu kariku nepokretnom, tj. formirati okvir (rack);
- postaviti zakon kretanja za jednu ili više karika (učiniti ih vodećim) na način da sve ostale karike rade potrebno svrsishodnih pokreta.
Broj stupnjeva slobode mehanizma- ovo je broj stupnjeva slobode cijelog kinematičkog lanca u odnosu na fiksnu kariku (rack).
Za prostorni kinematski lanac u opšti pogled uslovno označiti:
broj pokretnih dijelova - n,
broj stepeni slobode svih ovih karika je 6n,
broj kinematičkih parova 5. klase - P5,
broj veza nametnutih kinematičkim parovima 5. klase na karike uključene u njih, - 5R 5 ,
broj kinematičkih parova 4. klase - R 4,
broj veza nametnutih kinematičkim parovima 4. klase na karike uključene u njih, - 4P 4 itd.
Za stan kinematičkog lanca i, shodno tome, za ravni mehanizamOva formula se zove P.L. Čebišev (1869). Može se dobiti iz formule Malysheva, pod uslovom da na ravni tijelo ima ne šest, već tri stepena slobode:
W \u003d (6 - 3) n - (5 - 3) P 5 - (4 - 3) P 4.
Vrijednost W pokazuje koliko pogonskih karika mehanizam treba da ima (ako W= 1 - jedan, W= 2 - dvije vodeće veze, itd.).
Struktura mehanizma.
Klasifikacija kinematičkih parova
Kinematički parovi (KP) se klasifikuju prema sledećim kriterijumima:
1) prema vrsti kontaktne tačke (tačke spajanja) površina veze:
Donji, u kojima se kontakt karika vrši duž ravnine ili površine (klizni parovi);
Viša, u kojoj se kontakt karika vrši duž linija ili tačaka (parovi koji omogućavaju klizanje uz kotrljanje). Nalaze se, na primjer, u zupčanicima i zupčastim mehanizmima).
2) prema relativnom kretanju karika koje formiraju par:
Rotational;
Translational;
Cilindrični;
sferni;
Screw;
Stan.
Mehanizam čije karike formiraju samo rotacijske, translacijske, cilindrične i sferne parove naziva se poluga.
3) prema načinu zatvaranja (obezbeđivanje kontakta između karika para):
Snaga (zbog djelovanja sila težine ili elastične sile opruge);
Geometrijski (zbog dizajna radnih površina para).
Sl.2.1 Sl.2.2
4) prema broju pokretljivosti u relativnom kretanju karika.
5) prema broju uslova veze nametnutih relativnom kretanju karika (broj uslova veze određuje klasu kinematičkog para);
Tijelo, koje se nalazi u prostoru (u kartezijanskom koordinatnom sistemu X, Y, Z) ima 6 stupnjeva slobode. Može se kretati duž svake od tri ose X, Y i Z, kao i rotirati oko svake ose (slika 2.3). Ako tijelo (karika) formira kinematski par sa drugim tijelom (karicom), onda gubi jedan ili više od ovih 6 stupnjeva slobode.
Rice. 2.3. Stepeni slobode tijela u prostoru
Svi parovi su podijeljeni u pet klasa, ovisno o broju veza nametnutih na mobilnost svake od karika. Na primjer, ako su tijela (karike) koja su formirala kinematski par izgubila po 5 stupnjeva slobode, ovaj par se naziva kinematičkim parom 5. klase. Ako se izgube 4 stepena slobode - 4. klasa itd. Broj stupnjeva slobode je označen sa . Broj nametnutih veza je označen sa . U ovom slučaju, broj stupnjeva mobilnosti se može odrediti formulom: .
Par prve klase: ; .
Par druge klase: ; .
Par treće klase: ; .
Par četvrte klase: ; .
Par petog razreda: ; .
Primjeri klasifikacije parova:
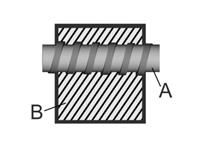
Razmotrimo kinematičku paru "vijak-matica" (slika 2.4). Broj stepeni pokretljivosti ovog para je 1, a broj nametnutih veza je 5. Ovaj par će biti par pete klase, može se slobodno birati samo jedan tip kretanja za vijak ili maticu, a drugi kretanje će biti prateći.
Sl.2.4
Klasifikacija kinematičkih lanaca
Nekoliko karika međusobno povezanih kinematičkim parovima čine kinematski lanac.
Kinematički lanci su:
Zatvoreno (jednostavno). U zatvorenom lancu svaka karika uključuje najmanje dva kinematička para.
Otvoreno (jednostavno).
Kompleks.
Na osnovu prisutnosti grana razlikovati lance jednostavno(svaka karika lanca ne uključuje više od dva kinematička para) i kompleks ili razgranat(neke veze dolaze u tri ili više para); takozvane višestruke (dvostruke, trostruke, itd.) šarke mogu biti prisutne u razgranatim lancima.
Po području kretanja karika lanci su stan(putanja tačaka svih karika su ravne krive koje leže u paralelnim ravnima) i prostorni.
Da bi se dobio mehanizam iz kinematičkog lanca, potrebno je:
Učinite jednu vezu nepokretnom, tj. formirati okvir (rack);
Postavite zakon kretanja za jednu ili više karika (učinite ih vodećim) na takav način da sve ostale karike vrše tražena svrsishodna kretanja.
Neke dodatne definicije:
Koordinata generalizovanog mehanizma- svaka od nezavisnih koordinata koje određuju položaj svih karika mehanizma u odnosu na stalak;
Broj stupnjeva slobode mehanizma- ovo je broj stupnjeva slobode cijelog kinematičkog lanca u odnosu na fiksnu kariku (rack).
Za prostorni kinematički lanac općenito, uvjetno označavamo:
Broj pokretnih veza - n,
Broj stepeni slobode svih ovih veza je 6n,
Broj kinematičkih parova 5. klase - P 5,
Broj veza nametnutih kinematičkim parovima 5. klase na karike uključene u njih je 5R 5,
Broj kinematičkih parova 4. klase - R 4,
Broj veza koje nameću kinematski parovi 4. klase na karike uključene u njih je 4P 4, itd.
Karike kinematičkog lanca, formirajući kinematičke parove sa drugim karikama, gube neke od stupnjeva slobode. Preostali broj stupnjeva slobode kinematičkog lanca u odnosu na stalak može se izračunati po formuli
Ovo je strukturna formula prostornog kinematičkog lanca, ili formula Malysheva, koju je dobio P.I. Somov 1887. godine, a razvio A.P. Malyshev 1923.
Vrijednost W se naziva stepenom pokretljivosti mehanizma (ako je mehanizam formiran iz kinematičkog lanca).
Za ravan kinematički lanac i, shodno tome, za ravan mehanizam
![]()
Ova formula se zove P.L. Čebišev (1869). Može se dobiti iz formule Malysheva, pod uslovom da na ravni tijelo ima ne šest, već tri stepena slobode:
Vrijednost W pokazuje koliko vodećih veza mehanizam treba da ima (ako je W = 1 - jedna, W = 2 - dvije vodeće veze, itd.).
Koncept strukturalne sinteze i analize
Struktura svakog tehničkog sistema određena je funkcionalno povezanim skupom elemenata i odnosa među njima. Istovremeno, za mehanizme se elementi shvataju kao veze, grupe karika ili tipični mehanizmi, a odnosi kao pokretne (KP) ili fiksne veze. Stoga, pod struktura mehanizma shvata se kao ukupnost njegovih elemenata i odnosa među njima, tj. skup karika, grupa ili tipičnih mehanizama i pokretnih ili fiksnih veza. Geometrijska struktura mehanizma u potpunosti je opisana navođenjem geometrijskog oblika njegovih elemenata, njihove lokacije i naznakom vrste veza između njih. Struktura mehanizma se može opisati u različitim fazama projektovanja na različite načine, sa različitim nivoima apstrakcije: na funkcionalnom nivou - funkcionalni dijagram, na nivou veza i strukturnih grupa - blok dijagram, itd. Strukturna shema - grafička slika mehanizam, napravljen pomoću simbola koje preporučuje GOST (vidi, na primjer, GOST 2.703-68) ili prihvaćen u posebnoj literaturi, koji sadrži informacije o broju i lokaciji elemenata (veza, grupa), kao i o vrsti i klasi kinematičke parovi koji povezuju ove elemente. Za razliku od kinematičkog dijagrama mehanizma, strukturni dijagram ne sadrži informacije o dimenzijama karika i crta se bez promatranja mjerila. (Bilješka: kinematička šema- grafički model mehanizma dizajniran za proučavanje njegove kinematike.)
Kao iu bilo kojoj fazi projektovanja u strukturnoj sintezi, razlikuju se zadaci sinteze i zadaci analize.
Zadatak strukturne analize je zadatak određivanja parametara strukture datog mehanizma - broja veza i strukturnih grupa, broja i vrste CP, broja mobilnosti (glavnih i lokalnih), broja kontura i broja redundantnih veza. .
zadatak strukturna sinteza je zadatak sintetiziranja strukture novog mehanizma sa specificiranim svojstvima: brojem mobilnosti, odsustvom lokalne mobilnosti i prekomjernih veza, minimalnim brojem veza, sa parovima određenog tipa (na primjer, samo rotacijskim, kao tehnološki najnapredniji) itd.
Osnovni koncepti strukturalne sinteze i analize
Mobilnost mehanizma- broj nezavisnih generalizovanih koordinata koje jednoznačno određuju položaj karika mehanizma na ravni ili u prostoru.
Veza- ograničenje nametnuto kretanju tijela duž date koordinate.
redundantno (pasivno)- takve veze u mehanizmu koje ponavljaju ili dupliraju veze koje već postoje na datoj koordinati, te stoga ne mijenjaju stvarnu mobilnost mehanizma. U tom slučaju se izračunata pokretljivost mehanizma smanjuje, a stepen njegove statičke neodređenosti povećava. Ponekad se koristi druga definicija: Redundantne veze- to su veze čiji je broj u mehanizmu određen razlikom između ukupnog broja veza nametnutih kinematičkim parovima i zbroja stupnjeva pokretljivosti svih karika, lokalne pokretljivosti i zadate (potrebne) pokretljivosti mehanizam u celini.
Lokalna mobilnost- pokretljivost mehanizma, koji ne utječu na njegovu funkciju položaja (i prijenosne funkcije), ali se uvode u mehanizam za druge svrhe (npr. pokretljivost valjka u zupčastom mehanizmu omogućava zamjenu u najvišem paru klizanja trenje trenjem kotrljanja).
Struktura mehanizma
Među raznovrsnim dizajnom mehanizama nalaze se: šipka (poluga), ekscentrični, frikcioni, zupčasti mehanizmi, mehanizmi sa fleksibilnim karikama (na primjer, remenski pogoni) i drugi tipovi.
Manje uobičajene klasifikacije podrazumijevaju prisustvo mehanizama sa nižim ili višim parovima u ravnom ili prostornom dizajnu, itd.
Koncept kinematičkog para
Kinematički par naziva se pokretna veza dviju karika. Kinematički parovi se klasifikuju prema različitim kriterijumima:
1) prema broju veza superponiranih na relativno kretanje karika povezanih u kinematičkom paru. Na osnovu toga kinematski parovi se dijele na klase. Prihvataju se sljedeće oznake:
W je broj stupnjeva slobode
S je broj veza superponiranih na relativno kretanje karika.
Slobodna veza u prostoru ima šest stepeni slobode. Kada se veze povežu, neki od ovih stepena slobode se oduzimaju („veze se nameću“). Odnos između broja superponiranih veza i preostalog broja stupnjeva slobode u relativnom kretanju karika je očigledan:
ili
S=6–W,
dakle, postoji pet klasa kinematičkih parova (ako oduzmete svih šest stepeni slobode, dobijate fiksnu vezu).
Slika 2 prikazuje primjere nekih kinematičkih parova.
| a) |
S \u003d 1 \u003d\u003e I razred.
|
S \u003d 2 \u003d\u003e II klasa.
|
S \u003d 3 \u003d\u003e III klasa.
|
 b)
b)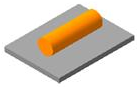 u)
u)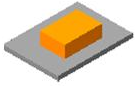 G)
G)Slika 2
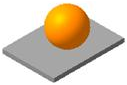
Lopta u odnosu na ravan (slika 2b), bez odvajanja od nje, može nastupiti rotacionim pokretima oko sve tri koordinatne ose, kao i kretanje duž ose "X" i "Y". Kada se kreće duž "Z" ose, lopta će izaći iz ravni, tj. postojaće dve slobodne veze - kinematički par će prestati da postoji. Dakle, jedna veza je superponirana na relativno kretanje karika - ovo je kinematički par klase I.
Slično, bez narušavanja prirode kontakta, cilindar se ne može pomicati duž "Z" ose i rotirati oko "Y" ose (slika 2c), tj. broj obveznica je dvije - par klase II. Ravan u odnosu na drugu ravan može se kretati translatorno duž "X" i "Y" ose, a takođe i rotirati oko "Z" ose bez narušavanja prirode kontakta. Translacijsko kretanje duž "Z" ose i rotaciono kretanje oko "X" i "Y" ose su nemoguće (slika 2d). Dakle, broj veza je tri - kinematički par klase III.
Napomena: ako kinematički par ima dva funkcionalna povezani pokreti(jedno bez drugog ne može postojati), daju jedan stepen slobode.
Na primjer, vijak i matica čine kinematički par pete klase. U ovom slučaju postoje dva pomeranja matice sa fiksnim vijkom - rotaciono kretanje oko ose vijka i translatorno kretanje duž ove ose, ali ne možete pomerati maticu duž ose bez okretanja, niti rotirati maticu tako da ne kreće se duž ose. Štoviše, poznavajući parametre navoja, lako je odrediti odnos između kuta rotacije i translacijskog kretanja matice.
Ova dva pokreta čine jedno složeno (u ovom slučaju spiralno) kretanje. On određuje jedan stepen slobode u relativnom kretanju ovih karika, tj. broj linkova je pet;
2) prema prirodi kontakta karika povezanih u kinematičkom paru. Na osnovu toga, kinematski parovi se dijele na više i niže. Viši parovi imaju tačkasti ili linearni kontakt karika koje čine ovaj kinematički par.
U donjem paru, karike su u dodiru jedna s drugom duž neke površine (u konkretnom slučaju duž ravni).
Niži kinematički parovi imaju veću nosivost, tk. imaju veliku kontaktnu površinu (u gornjem paru, kontaktna površina je teoretski jednaka nuli, ali u stvarnosti se dobija zahvaljujući elementima kinematičkog para - „tačka kontakta"). Ali u nižim parovima jedna površina klizi u odnosu na druge tokom rada, dok kod viših parova može doći i do klizanja i kotrljanja.
Otpor na klizanje je u pravilu veći od otpora kotrljanja jedne površine u odnosu na drugu, tj. gubici trenja u gornjem paru (ako se koristi samo kotrljanje) manji su nego u donjem paru (dakle, da bi se povećao koeficijent korisna akcija klizni ležajevi se obično zamjenjuju kotrljajućim ležajevima).
Kinematički parovi prikazani na slikama 2b i 2c su najviši, a par na slici 2d je najniži kinematički par;
3) duž putanje kretanja tačaka koje pripadaju karikama koje čine kinematički par. Na osnovu toga razlikuju se prostorni i ravni kinematički parovi.
U ravnom kinematičkom paru sve tačke se kreću u jednoj ili paralelnoj ravni, a putanje njihovog kretanja su ravne krive. U prostornim parovima, tačke se kreću u različitim ravnima i imaju putanje u obliku prostornih krivulja.
Značajan broj mehanizama koji se koriste u praksi su ravni mehanizmi (prema klasifikaciji I.I. Artobolevskog - mehanizmi treće porodice), stoga je potrebno detaljnije razmotriti ravne kinematičke parove.
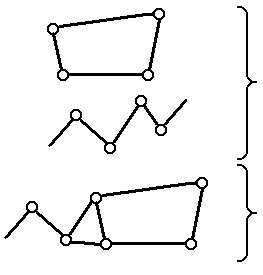
Slobodna karika postavljena u ravni ima tri stepena slobode (translaciono kretanje duž koordinatnih ose i rotaciono kretanje oko ose okomite na datu ravan). Dakle, postavljanje veze u ravan oduzima joj tri stepena slobode (nalaže tri veze). Ali veza ove veze sa drugom u kinematičkom paru nameće više veza na relativno kretanje (minimalni broj je 1). Kao rezultat, samo kinematički parovi mogu postojati na ravni, koji imaju dva ili jedan stepen slobode u relativnom kretanju.
Prema generalnoj klasifikaciji, radi se o parovima četvrtog i petog razreda. Najjednostavniji parovi pete klase pružaju samo jedno kretanje - rotacijsko ili translacijsko (rotacijski kinematički par u tehnologiji naziva se šarka, translacijski par, po analogiji s translacijsko pokretnom vezom, ponekad se naziva i klizač).
Dva stepena slobode u relativnom kretanju na ravni obično daju dva kontaktna profila (na kinematičkom dijagramu kontakt u tački; u realnom mehanizmu to može biti linija koja je projektovana u tačku). Dakle, ravni kinematički parovi pete klase (šarke i klizači) su istovremeno niži parovi, a kinematički parovi četvrte klase su viši parovi.
Slika 3 prikazuje šematski prikaz ravnih kinematičkih parova.
4) prema prirodi zatvaranja karika povezanih u kinematičkom paru. Postoje dvije vrste kinematičkih parova koji se međusobno razlikuju u ovom pogledu. Kinematički parovi sa geometrijskim zatvaranjem i kinematički parovi sa zatvaranjem sile.
U parovima sa pozitivnim zaključavanjem, konfiguracija karika sprečava njihovo odvajanje tokom rada. Na primjer, spajanje klipnjače na radilicu pomoću poklopca klipnjače, ili bilo koje druge šarke (vrata sa dovratnikom, prozor sa okvirom prozora, itd.).
U parovima sa strujnim krugom, kontakt karika tokom rada je stalno osiguran aktivna snaga. Na slici 2, svi kinematički parovi su parovi sa silom zatvaranja, a težina djeluje kao sila zatvaranja. Ako težina nije dovoljna, obično se koriste različiti elastični elementi (najčešće opruge) za stvaranje sile pritiska.
STRUKTURA MEHANIZAMA
Osnovni pojmovi i definicije.
Sistem termina pruža jedinstven pristup opisu svakog sistema znanja. Stoga, počnimo s razjašnjavanjem značenja i značenja korištene formulacije.
mehanizam - sistem tijela dizajniran da transformiše kretanje jednog ili više čvrste materije i (ili) sile koje na njih djeluju u potrebna kretanja drugih tijela i (ili) sila. U teoriji mehanizama i mašina, čvrsta tijela se shvataju i kao apsolutno kruta i kao deformabilna tijela.
Auto- uređaj koji izvodi mehaničke pokrete za pretvaranje energije, materijala i informacija. Materijali su predmeti rada: prerađeni proizvodi, transportna roba itd.
Detalj - proizvod izrađen od ujednačenog materijala, po imenu i marki, bez upotrebe montažnih operacija.
Veza je kruto tijelo koje učestvuje u datoj transformaciji kretanja. Veza se može sastojati od nekoliko dijelova koji nemaju relativno kretanje između sebe.
stalak - link koji se uslovno prihvata kao fiksni.
Input link- vezu na koju se prijavljuje kretanje, koju mehanizam pretvara u potrebna kretanja drugih veza.
izlazna veza- karika koja vrši kretanje za koje je mehanizam namijenjen.
Početni link - veza kojoj je dodijeljena jedna ili više generaliziranih koordinata mehanizma.
Koordinata generalizovanog mehanizma- svaka od nezavisnih koordinata koje određuju položaj svih karika mehanizma u odnosu na stalak.
Broj stupnjeva slobode mehanizma je broj generaliziranih koordinata mehanizma.
Veza– svaki uslov koji smanjuje broj stupnjeva slobode mehanizma. Svaka veza se može odbaciti zamjenom njenog djelovanja reakcijom.
Redundantna veza– veza čijim se eliminacijom ne mijenja broj stupnjeva slobode mehanizma.
Kinematički par– spoj dva kruta tijela mehanizma, omogućavajući njihovo dato relativno kretanje. Uslov za postojanje para je: prisustvo dve karike, njihov kontakt i relativno kretanje karika.
Kinematički lanac- sistem veza i (ili) čvrstih elemenata mehanizma koji tvore kinematičke parove jedni s drugima. Razlikovati kinematičke lance otvoren i zatvoreno. otvoren naziva se takav kinematički lanac koji ima barem jednu kariku uključenu u samo jedan kinematički par. At zatvoreno u lancu nema karika koje imaju slobodne elemente kinematičkih parova. Svaka karika takvog lanca uključena je u najmanje dva para.
element mehanizma- čvrsta, tečna ili plinovita komponenta mehanizma koja osigurava interakciju njegovih karika koje nisu u direktnom kontaktu jedna s drugom.
Element sučelja kinematskog para- zajednička površina, linija ili tačka koju čine spojni elementi dva druga tijela.
Broj stupnjeva slobode (pokretljivosti) kinematičkog para (N)- broj nezavisnih koordinata potrebnih za opisivanje relativne pozicije karika kinematičkih parova.
Poznato je da tijelo koje se slobodno kreće u prostoru ima šest stupnjeva slobode. Broj uslova komunikacije S superponirano na relativno kretanje karike kinematičkog para može varirati unutar . Postoje jedno-, dvo-, tro-, četvoro- i pet pokretnih kinematičkih parova. Dakle, imamo odnos H = 6 - S.
Jednokretni par– kinematski par sa jednim stepenom slobode u relativnom kretanju povezanih krutih tela.
Dvostruki pokretni par– kinematski par sa dva stepena slobode u relativnom kretanju povezanih krutih tela.
Trokretni par– kinematski par sa tri stepena slobode u relativnom kretanju povezanih krutih tela.
Četvorokretni par– kinematski par sa četiri stepena slobode u relativnom kretanju povezanih krutih tela.
Par u pet selidbi– kinematski par sa pet stupnjeva slobode u relativnom kretanju povezanih krutih tijela.
Strukturna formula – algebarski izraz, koji uspostavlja odnos između broja stupnjeva slobode mehanizma, broja pokretnih karika, broja i pokretljivosti kinematičkih parova.
Assura Group- kinematički lanac čiji spoj na mehanizam ili njegovo isključenje formira mehanizam čija je pokretljivost jednaka pokretljivosti originalnog mehanizma, koji nije podijeljen na druge lance s istim svojstvima.
Faktor skale- odnos brojčane vrijednosti fizička količina u jedinicama karakterističnim za to do dužine segmenta (mm) koji prikazuje ovu vrijednost (na dijagramu, grafikonu, itd.).
Scale je recipročna vrijednost faktora skale.
Klasifikacija kinematičkih parova
1. Ovisno o broju H razlikovati jedno-, dvo-, tro-, četvoro- i petokretni kinematičke parove. Broj jednačina ograničenja uzima se kao broj klase.
2. Po prirodi kontakta elemenata veza (tačnije, vrsti elemenata), parovi se dijele na niže i u viši(prijedlog F. Relo). To inferioran uključuju kinematičke parove čiji su elementi površine (slika 1.2). Elementi viši parovi su linije ili tačke (slika 1.2).
3. Po prirodi uparivanja razlikuju se kinematičke parove sa zatvaranjem sile (kontakt karika se ostvaruje djelovanjem neke sile, na primjer, utega ili opruge) i kinematičke (ostvaruje se stalni kontakt karika zbog strukturalnog oblika elemenata).
4. U zavisnosti od prirode relativnog kretanja karika, kinematski parovi se dele na translatorne, rotacione, spiralne, cilindrične, sferne, planarne.
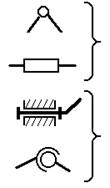
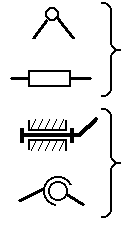
Na sl. 1.1 prikazuje parove sa jednim pokretom (kinematički parovi klase V), razmotrimo ih detaljnije.
|
|||||
|
|||||
|
|||||
|
Par jednokretnih:
1) rotacijski(Sl. 1.1. a) - cilindrična šarka. Nameće se pet uslova povezivanja: svi pokreti su isključeni, osim rotacijskih.
2) Translational(Sl. 1.1. b) - nameće se pet uslova povezivanja: svi pokreti su isključeni, osim jednog translacionog.
3) vijak(Sl. 1.1. c) - nameće se pet uslova povezivanja: svi pokreti su isključeni, osim translatornog. (Rotacija ne uvodi stepene slobode, jer u ovom slučaju translaciono i rotaciono kretanje nisu nezavisne).
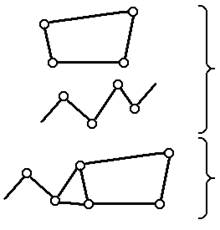
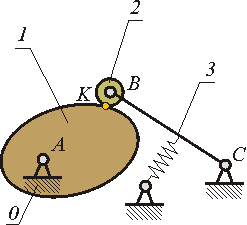
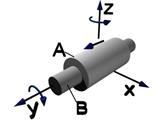
Na sl. 1.2 prikazuje parove dvo-, tro-, četvoro- i petokretni(kinematičke parove IV, III, II i I klase) razmotrićemo ih detaljnije.
|
|
|
||||||
|
||||||||
|
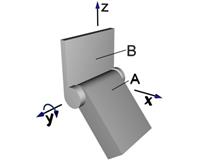
Dvostruki par(Sl. 1.2.a) - čaura na valjku. Nametnuta su četiri uvjeta spajanja, isključena su translacijska i rotirajuća kretanja duž osa OH i OZ.
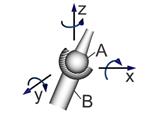
Trokretni par(Sl. 1.2.b) - sferni cilindar. Nametnuta su tri uvjeta povezivanja: translacijska kretanja duž sve tri ose su isključena.
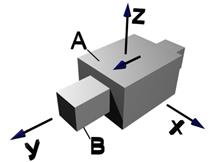
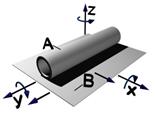
Par četiri pokretne(Sl. 1.2.c) - cilindar na ravni. Nametnuta su dva uvjeta povezivanja: translacijsko kretanje duž ose O Z i rotaciono kretanje oko ose O X su isključeni.
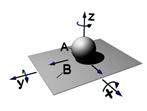
Par petokretnih(Sl. 1.2.d) - lopta na ravni. Postavlja se jedan uslov povezivanja: translatorno kretanje duž ose O Z je isključeno.
Kinematički par pokretna konjugacija dve čvrste karike, namećući ograničenja na njihovo relativno kretanje uslovima komunikacije. Svaki od uslova veze eliminiše jedan stepen slobode ,
odnosno mogućnost jednog od 6 nezavisnih relativnih kretanja u prostoru. U pravougaonom koordinatnom sistemu moguća su 3 translatorni pokreti(u smjeru 3 koordinatne ose) i 3 rotacijske (oko ovih osa). Prema broju uslova komunikacije S K. p. podijeljeni su u 5 klasa. Broj stepeni slobode K. p. W=6-S. Unutar svake klase, K. stavke su podijeljene na tipove prema preostalim mogućim relativnim kretanjima veza. Prema prirodi kontakta karika, razlikuju se niži K. p. - s kontaktom duž površina, i viši - s kontaktom duž linija ili u tačkama. Stavke višeg K. moguće su za svih 5 klasa i više tipova; niže - samo 3 klase i 6 vrsta ( sl.1
). Također se pravi razlika između geometrijski zatvorenih i nezatvorenih k.p. pirinač. jedan
), i drugo, potrebna je sila pritiska za zatvaranje, tzv. prisilno zatvaranje (na primjer, u zupčastom mehanizmu). Uobičajeno, pokretne spojnice s nekoliko međukotrljajućih elemenata (na primjer, kuglični i valjkasti ležajevi) i sa srednjim deformabilnim elementima (na primjer, tzv. šarke bez zazora uređaja s ravnim oprugama) nazivaju se k. pirinač. 2
). N. Ya. Niberg.
Veliki sovjetska enciklopedija. - M.: Sovjetska enciklopedija. 1969-1978 .
Pogledajte šta je "Kinematički par" u drugim rječnicima:
Povezivanje 2 karike mehanizma, omogućavajući njihovo relativno kretanje. Kinematički par, u kojem se karike dodiruju na površini, naziva se donji (na primjer, rotirajuća šarka, translacijski klizač i vodilica). Kinematički par, ... ... Veliki enciklopedijski rječnik
kinematičkog para- par Veza dve susedne karike, omogućavajući njihovo relativno kretanje. [Zbirka preporučenih termina. Broj 99. Teorija mehanizama i mašina. Akademija nauka SSSR. Komitet za naučnu i tehničku terminologiju. 1984] Teorija tema ... ... Priručnik tehničkog prevodioca- kinematinė pora statusas T sritis fizika atitikmenys: angl. kinematski par vok. kinematisches Elementenpaar, n rus. kinematski par, f pranc. paire cinématique, f … Fizikos terminų žodynas
Povezivanje dve susedne veze, omogućavajući im da budu povezani. saobraćaja. Površine, linije, tačke na koje veza može doći u kontakt sa drugom vezom, tzv. elementi veze. K. p. dijele se na niže (kontaktne površine) i više ... ... Veliki enciklopedijski politehnički rječnik
kinematičkog para- kinematski par Spoj dva kruta tijela mehanizma, omogućavajući njihovo dato relativno kretanje. Šifra IFToMM: 1.2.3 Odjeljak: OPŠTI POJMOVI TEORIJE MEHANIZAMA I MAŠINA ... Teorija mehanizama i mašina
par- kinematski par; par Veza dviju uzastopnih karika, koja omogućava relativno kretanje od njih. par sila; par sistem dva paralelne sile, jednake apsolutne vrijednosti i usmjerene u suprotnim smjerovima ...
top par- Kinematički par u kojem se potrebno relativno kretanje karika može dobiti samo dodirom njegovih elemenata duž linija i u tačkama... Politehnički terminološki rječnik





