Kinematik juftlarning turlari va ularning qisqacha tavsifi
Fizik miqdorlar va o'lchov birliklari,
Mexanikada qo'llaniladi
| Jismoniy miqdor | O'lchov birligi | ||
| Ism | Belgilanish | Ism | Belgilanish |
| Uzunlik Massa Vaqti Tekislik burchagi Nuqtaning siljishi Chiziqli tezlik Burchak tezligi Chiziqli tezlanish Burchak tezlanishi Aylanish chastotasi Materiallar zichligi Inersiya momenti Kuch Kuch momenti momenti Ish Kinetik energiya Quvvat | L, l, r m T, t a, b, g, d S u w a e n r J F, P, Q, G M T A E N | Metr Kilogramm Ikkinchi Radian, gradus Metr soniyada metr Radian soniyada Metr kvadrat soniyada Radian kvadrat soniyada inqilob daqiqada bir kub metr Kilogramm kvadrat Nyuton Nyuton metr Nyuton metr Joul Joul Vatt | m kg s rad, a 0 m m / s rad / s, 1 / s m / s 2 rad / s 2, 1 / s 2 rpm kg / m 3 kg. m 2 N (kg. m / s 2) Nm Nm J \u003d Nm J W (J / s) |
MEXANIZMLARNING TUZILISHI VA TASNIFI
Mexanizm tuzilishi
Mexanizmlar o'z ichiga oladi qattiq jismlar kim chaqiriladi havolalar. Bog'lanishlar mustahkam bo'lmasligi mumkin (masalan, kamar). Gidravlik va pnevmomexanizmlardagi suyuqliklar va gazlar bog'lanish hisoblanmaydi.
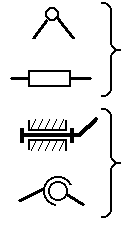
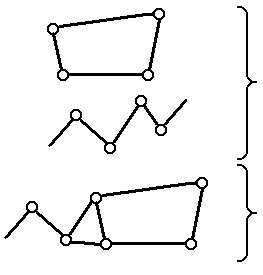
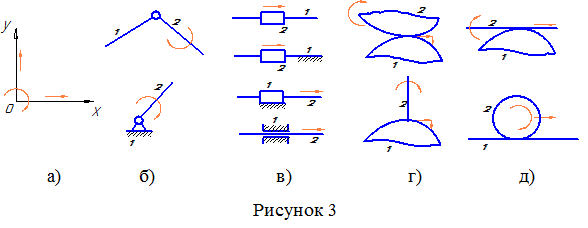
Mexanizmlarning kinematik diagrammalarida havolalarning shartli ko'rinishi GOST tomonidan tartibga solinadi. Ba'zi havolalarning rasmlariga misollar shaklda ko'rsatilgan. 1.1.
Guruch. 1.1. Bog'langan rasmlarga misollar
mexanizmlarning kinematik diagrammalarida
Bog'lanishlar sodir bo'ladi:
– kiritish(rahbarlar) - ularning ajralib turadigan xususiyati shundaki boshlang'ich ish ularga qo'llaniladigan kuchlar ijobiydir (agar kuchning yo'nalishi uni qo'llash nuqtasi yoki ostidagi harakat yo'nalishiga to'g'ri kelsa, kuchning ishi ijobiy hisoblanadi. o'tkir burchak unga);
– dam olish kunlari(qul) - ularga qo'llaniladigan kuchlarning elementar ishi manfiy (agar kuchning yo'nalishi uni qo'llash nuqtasining harakat yo'nalishiga qarama-qarshi bo'lsa, kuchning ishi salbiy hisoblanadi);
– mobil;
– harakatsiz(to'shak, tokcha).
Kinematik diagrammalarda havolalar arab raqamlari bilan ko'rsatilgan: 0, 1, 2 va boshqalar. (1.1-rasmga qarang).
Ikki qo'shni bo'g'inning harakatlanuvchi ulanishi deyiladi kinematik juftlik. Bu bir bo'g'inning boshqasiga nisbatan harakatlanish imkoniyatini beradi.
Tasniflash kinematik juftliklar
1. Bog'lanishlarni ulash elementlari bo'yicha kinematik juftliklar bo'linadi:
- yuqori uchun(ular, masalan, tishli va vitesli mexanizmlarda mavjud) - aloqalar bir chiziq bo'ylab yoki bir nuqtada bir-biriga bog'langan:
– pastroq- zvenolarning bir-biri bilan bog'lanishi sirtda sodir bo'ladi. O'z navbatida, quyi birikmalar bo'linadi:
aylanish uchun
progressiv
silindrsimon
|
sharsimon
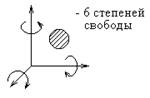
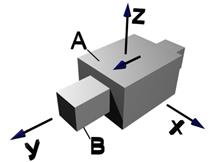
2. Ustiga qo‘yilgan bog‘lanishlar soni bo‘yicha. Kosmosda bo'lgan tana (kartezian koordinata tizimida). X, Y, Z) 6 erkinlik darajasiga ega. U uchta o'qning har biri bo'ylab harakatlanishi mumkin X, Y va Z, shuningdek, har bir o'q atrofida aylantiring (1.2-rasm). Agar jism (bog'lanish) boshqa jism (bog') bilan kinematik juftlik hosil qilsa, u bu 6 erkinlik darajasidan birini yoki bir nechtasini yo'qotadi.
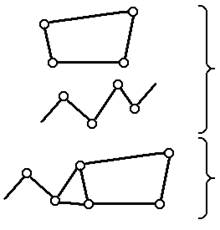
Tananing (bog'lanish) yo'qotgan erkinlik darajalari soniga ko'ra kinematik juftliklar 5 sinfga bo'linadi. Masalan, kinematik juftlikni hosil qilgan jismlar (bog'lar) har biri 5 daraja erkinlikni yo'qotgan bo'lsa, bu juftlik 5-sinfning kinematik juftligi deyiladi. Agar erkinlikning 4 darajasi yo'qolsa - 4-sinf va boshqalar. Turli sinflarning kinematik juftliklariga misollar shaklda ko'rsatilgan. 1.2.
 Guruch. 1.2. Turli sinflarning kinematik juftliklariga misollar
Guruch. 1.2. Turli sinflarning kinematik juftliklariga misollar
Strukturaviy va konstruktiv asosda kinematik juftlarni aylanma, tarjima, sferik, silindrsimon va boshqalarga bo'lish mumkin.
Kinematik zanjir
Kinematik juftliklar bilan o'zaro bog'langan bir nechta bog'lanishlar hosil bo'ladi kinematik zanjir.
Kinematik zanjirlar quyidagilar:
yopiq
ochiq
Kinematik zanjirdan jihoz oling, zarur:
- bitta havolani ko'chmas holga keltiring, ya'ni. ramka (rafta) hosil qilish;
- bir yoki bir nechta bo'g'inlar uchun harakat qonunini boshqa barcha bo'g'inlar bajaradigan tarzda o'rnating (ularni etakchi qilib qo'ying). talab qilinadi maqsadli harakatlar.
Mexanizmning erkinlik darajalari soni- bu butun kinematik zanjirning sobit bo'g'inga (rack) nisbatan erkinlik darajalari soni.
Uchun fazoviy kinematik zanjir umumiy ko'rinish shartli ravishda belgilang:
harakatlanuvchi qismlar soni - n,
bu barcha bog'lanishlarning erkinlik darajalari soni 6n,
5-sinfning kinematik juftlari soni - P5,
5-sinf kinematik juftliklari tomonidan ularga kiritilgan bog'lanishlarga o'rnatilgan bog'lanishlar soni, - 5R 5 ,
4-sinf kinematik juftliklar soni - R 4,
4-sinf kinematik juftliklari tomonidan ularga kiritilgan bog'lanishlarga o'rnatilgan bog'lanishlar soni, - 4P 4 va hokazo.
Uchun tekis kinematik zanjir va shunga mos ravishda tekis mexanizm uchunUshbu formula P.L deb ataladi. Chebishev (1869). Buni Malyshev formulasidan olish mumkin, agar tekislikda tananing oltita emas, balki uch erkinlik darajasi bo'lsa:
W \u003d (6 - 3)n - (5 - 3)P 5 - (4 - 3) P 4.
Vt qiymati mexanizm qancha harakatlantiruvchi bo'g'inlarga ega bo'lishi kerakligini ko'rsatadi (agar V= 1 - bir, V= 2 - ikkita etakchi havolalar va boshqalar).
Mexanizm tuzilishi.
Kinematik juftlarning tasnifi
Kinematik juftliklar (KP) quyidagi mezonlarga ko'ra tasniflanadi:
1) bog'lanish yuzalarining aloqa nuqtasi (ulanish nuqtasi) turiga ko'ra:
Bog'lanishlarning aloqasi tekislik yoki sirt (surma juftlari) bo'ylab amalga oshiriladigan pastki bo'lganlar;
Yuqori, unda bog'lanishlarning aloqasi chiziqlar yoki nuqtalar bo'ylab amalga oshiriladi (dumalab siljish imkonini beruvchi juftliklar). Ular, masalan, tishli va vites mexanizmlarida mavjud).
2) juftlik hosil qiluvchi bog‘lanishlarning nisbiy harakatiga ko‘ra:
aylanish;
Tarjima;
silindrsimon;
sharsimon;
Vida;
Yassi.
Bog'lanishlari faqat aylanma, translatsiya, silindrsimon va sferik juftlarni hosil qiladigan mexanizm deyiladi. dastagi.
3) yopilish usuliga ko'ra (juftlik bo'g'inlari orasidagi aloqani ta'minlash):
Quvvat (og'irlik kuchlarining ta'siri yoki bahorning elastik kuchi tufayli);
Geometrik (juftning ishchi yuzalarining dizayni tufayli).
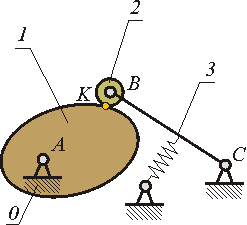
2.1-rasm 2.2-rasm
4) bo'g'inlarning nisbiy harakatida harakatchanlik soniga ko'ra.
5) bog'lanishlarning nisbiy harakatiga qo'yilgan ulanish shartlari soniga ko'ra (ulanish shartlari soni kinematik juftlik sinfini belgilaydi);
Kosmosda bo'lgan tana (X, Y, Z Dekart koordinatalari tizimida) 6 erkinlik darajasiga ega. U X, Y va Z uchta o'qning har biri bo'ylab harakatlanishi, shuningdek, har bir o'q atrofida aylanishi mumkin (2.3-rasm). Agar jism (bog'lanish) boshqa jism (bog') bilan kinematik juftlik hosil qilsa, u bu 6 erkinlik darajasidan birini yoki bir nechtasini yo'qotadi.
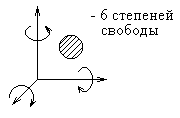
Guruch. 2.3. Tananing kosmosdagi erkinlik darajalari
Bog'lanishlarning har birining harakatchanligiga o'rnatilgan bog'lanishlar soniga qarab, barcha juftliklar beshta sinfga bo'linadi. Masalan, kinematik juftlikni hosil qilgan jismlar (bog'lar) har biri 5 daraja erkinlikni yo'qotgan bo'lsa, bu juftlik 5-sinfning kinematik juftligi deyiladi. Agar erkinlikning 4 darajasi yo'qolsa - 4-sinf va boshqalar. Erkinlik darajalari soni bilan ko'rsatiladi. O'rnatilgan ulanishlar soni bilan belgilanadi. Bunda harakatchanlik darajalari sonini quyidagi formula bilan aniqlash mumkin.
Birinchi darajali juftlik: ; .
Ikkinchi darajali juftlik: ; .
Uchinchi sinf juftligi: ; .
To'rtinchi sinf juftligi: ; .
Beshinchi sinf juftligi: ; .
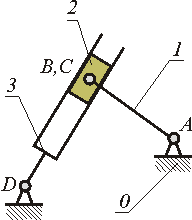
Juftlik tasnifiga misollar:
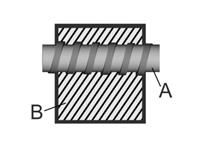
"Vint-gayka" kinematik juftligini ko'rib chiqing (2.4-rasm). Bu juftlikning harakatchanlik darajalari soni 1, o'rnatilgan bog'lanishlar soni esa 5. Bu juftlik beshinchi sinf juftligi bo'ladi, vint yoki gayka uchun faqat bitta harakat turini erkin tanlash mumkin, ikkinchisi esa. harakat hamroh bo'ladi.
2.4-rasm
Kinematik zanjirlarning tasnifi
Kinematik juftliklar bilan o'zaro bog'langan bir nechta bo'g'inlar kinematik zanjir hosil qiladi.
Kinematik zanjirlar quyidagilar:
Yopiq (oddiy). Yopiq zanjirda har bir bo'g'in kamida ikkita kinematik juftlikni o'z ichiga oladi.
Ochiq (oddiy).
Kompleks.
Filiallar mavjudligiga asoslanadi zanjirlarni farqlash oddiy(zanjirning har bir bo'g'ini ikkitadan ko'p bo'lmagan kinematik juftlikni o'z ichiga oladi) va murakkab yoki tarvaqaylab ketgan(ba'zi havolalar uch yoki undan ortiq juft bo'ladi); tarvaqaylab ketgan zanjirlarda bir nechta (ikki, uch va boshqalar) deb ataladigan menteşeler mavjud bo'lishi mumkin.
Bog'lanishlarning harakatlanish maydoni bo'yicha zanjirlardir tekis(barcha bo'g'inlar nuqtalarining traektoriyalari parallel tekisliklarda yotgan tekis egri chiziqlardir) va fazoviy.
Kinematik zanjirdan mexanizm olish uchun quyidagilar zarur:
Bitta havolani ko'chmas holga keltiring, ya'ni. ramka (rafta) hosil qilish;
Bir yoki bir nechta bo'g'inlar uchun harakat qonunini shunday o'rnating (ularni etakchiga aylantiring), boshqa barcha bo'g'inlar kerakli harakatlarni amalga oshiradi.
Ba'zi qo'shimcha ta'riflar:
Umumlashtirilgan mexanizm koordinatasi- mexanizmning barcha bo'g'inlarining rafga nisbatan o'rnini aniqlaydigan mustaqil koordinatalarning har biri;
Mexanizmning erkinlik darajalari soni- bu butun kinematik zanjirning sobit bo'g'inga (rack) nisbatan erkinlik darajalari soni.
Umumiy ma'noda fazoviy kinematik zanjir uchun biz shartli ravishda belgilaymiz:
Harakatlanuvchi havolalar soni - n,
Bu barcha bog'lanishlarning erkinlik darajalari soni 6n,
5-sinfning kinematik juftlari soni - P 5,
5-sinfning kinematik juftlari tomonidan ularga kiritilgan bog'lanishlarga o'rnatilgan bog'lanishlar soni 5R 5,
4-sinfning kinematik juftlari soni - R 4,
4-sinf kinematik juftliklari tomonidan ularga kiritilgan bog'lanishlarga o'rnatilgan bog'lanishlar soni 4P 4 va boshqalar.
Kinematik zanjirning bo'g'inlari, boshqa zvenolar bilan kinematik juftliklar hosil qilib, erkinlik darajalarining bir qismini yo'qotadi. Rafga nisbatan kinematik zanjirning erkinlik darajalarining qolgan sonini formula bo'yicha hisoblash mumkin.
Bu fazoviy kinematik zanjirning strukturaviy formulasi yoki P.I. tomonidan olingan Malyshev formulasi. Somov 1887 yilda ishlab chiqilgan va A.P. Malyshev 1923 yilda.
Vt qiymati mexanizmning harakatchanlik darajasi deb ataladi (agar mexanizm kinematik zanjirdan hosil bo'lsa).
Yassi kinematik zanjir uchun va shunga mos ravishda tekis mexanizm uchun
![]()
Ushbu formula P.L deb ataladi. Chebishev (1869). Buni Malyshev formulasidan olish mumkin, agar tekislikda tananing oltita emas, balki uch erkinlik darajasi bo'lsa:
W qiymati mexanizmning qancha etakchi bo'g'inlarga ega bo'lishi kerakligini ko'rsatadi (agar W = 1 - bitta, W = 2 - ikkita etakchi havola va boshqalar).
Strukturaviy sintez va tahlil tushunchasi
Har qanday texnik tizimning tuzilishi funktsional jihatdan bog'langan elementlar to'plami va ular orasidagi munosabatlar bilan belgilanadi. Shu bilan birga, mexanizmlar uchun elementlar deganda bo'g'inlar, bo'g'inlar guruhlari yoki tipik mexanizmlar, aloqalar esa harakatlanuvchi (KP) yoki qo'zg'almas ulanishlar sifatida tushuniladi. Shuning uchun, ostida mexanizm tuzilishi uning elementlari va ular o'rtasidagi munosabatlarning yig'indisi sifatida tushuniladi, ya'ni. bog'lanishlar, guruhlar yoki odatiy mexanizmlar va harakatlanuvchi yoki qo'zg'almas ulanishlar to'plami. Mexanizmning geometrik tuzilishi uning elementlarining geometrik shakli, joylashuvi va ular orasidagi bog'lanish turini ko'rsatish orqali to'liq tavsiflanadi. Mexanizm tuzilishi dizaynning turli bosqichlarida, turli darajadagi mavhumlik bilan tavsiflanishi mumkin: funktsional darajada - funktsional diagramma, bo'g'inlar va strukturaviy guruhlar darajasida - blok-sxema va boshqalar. Strukturaviy sxema - grafik tasvir GOST tomonidan tavsiya etilgan belgilar (masalan, GOST 2.703-68 ga qarang) yoki maxsus adabiyotlarda qabul qilingan, elementlarning soni va joylashuvi (bog'lanishlar, guruhlar), shuningdek kinematikning turi va sinfi to'g'risidagi ma'lumotlarni o'z ichiga olgan mexanizm. bu elementlarni bog'laydigan juftliklar. Mexanizmning kinematik diagrammasidan farqli o'laroq, strukturaviy diagrammada havolalarning o'lchamlari haqida ma'lumot mavjud emas va o'lchovni kuzatmasdan chiziladi. (Eslatma: kinematik sxema- uning kinematikasini o'rganish uchun mo'ljallangan mexanizmning grafik modeli.)
Strukturaviy sintezda dizaynning har qanday bosqichida bo'lgani kabi, sintez vazifalari va tahlil vazifalari farqlanadi.
Strukturaviy tahlil vazifasi ma'lum bir mexanizmning strukturasi parametrlarini aniqlash vazifasi - bo'g'inlar va tizimli guruhlar soni, CP soni va turi, harakatchanlik soni (asosiy va mahalliy), konturlar soni va ortiqcha bog'lanishlar soni. .
vazifa strukturaviy sintez Belgilangan xususiyatlarga ega yangi mexanizmning tuzilishini sintez qilish vazifasi: harakatchanlik soni, mahalliy harakatchanlikning yo'qligi va haddan tashqari ulanishlar, ma'lum bir turdagi juftliklar bilan bog'lanishlarning minimal soni (masalan, faqat aylanish, texnologik jihatdan eng ilg'or) va boshqalar.
Strukturaviy sintez va analizning asosiy tushunchalari
Mexanizmning harakatchanligi- tekislikdagi yoki kosmosdagi mexanizm bo'g'inlarining holatini yagona aniqlaydigan mustaqil umumlashtirilgan koordinatalar soni.
Ulanish- tananing berilgan koordinata bo'ylab harakatlanishiga qo'yilgan cheklash.
Ortiqcha (passiv)- berilgan koordinatada mavjud bo'lgan bog'lanishlarni takrorlaydigan yoki takrorlaydigan mexanizmdagi bunday bog'lanishlar va shuning uchun mexanizmning haqiqiy harakatchanligini o'zgartirmaydi. Bunday holda, mexanizmning hisoblangan harakatchanligi pasayadi va uning statik noaniqlik darajasi oshadi. Ba'zida boshqa ta'rif ishlatiladi: Ortiqcha ulanishlar- bu bog'lanishlar bo'lib, ularning soni mexanizmdagi kinematik juftliklar tomonidan o'rnatilgan bog'lanishlarning umumiy soni va barcha bo'g'inlarning harakatchanlik darajalari yig'indisi, mahalliy harakatchanlik va berilgan (kerakli) harakatchanlik o'rtasidagi farq bilan belgilanadi. butun mexanizm.
Mahalliy harakatchanlik- mexanizmning harakatchanligi, bu uning joylashish funktsiyasiga (va uzatish funktsiyalariga) ta'sir qilmaydi, lekin mexanizmga boshqa maqsadlarda kiritiladi (masalan, rulman mexanizmidagi rolikning harakatchanligi eng yuqori siljish juftligini almashtirishni ta'minlaydi. dumalab ishqalanish bilan ishqalanish).
Mexanizm tuzilishi
Mexanizmlar konstruksiyalarining xilma-xilligi orasida: novda (tutqich), shisha, ishqalanish, tishli mexanizmlar, egiluvchan bo'g'inli mexanizmlar (masalan, kamar uzatmalari) va boshqa turlar mavjud.
Kamroq tarqalgan tasniflar tekis yoki fazoviy dizayndagi pastki yoki yuqori juftliklarga ega mexanizmlarning mavjudligini anglatadi.
Kinematik juftlik tushunchasi
Kinematik juftlik ikki zvenoning harakatlanuvchi tutashuvi deyiladi. Kinematik juftliklar turli mezonlarga ko'ra tasniflanadi:
1) kinematik juftlikda bog'langan zvenolarning nisbiy harakati ustiga qo'yilgan bog'lanishlar soniga ko'ra. Shu asosda kinematik juftliklar sinflarga bo'linadi. Quyidagi belgilar qabul qilinadi:
W - erkinlik darajalari soni
S - bog'lanishlarning nisbiy harakati ustiga qo'yilgan bog'lanishlar soni.
Kosmosdagi erkin aloqa oltita erkinlik darajasiga ega. Bog'lanishlar ulanganda, ushbu erkinlik darajalarining bir qismi olib tashlanadi ("bog'lanishlar o'rnatiladi"). Bog'lanishlarning nisbiy harakatida o'rnatilgan bog'lanishlar soni va qolgan erkinlik darajalari o'rtasidagi bog'liqlik aniq:
yoki
S=6–W,
Shunday qilib, kinematik juftlarning beshta sinfi mavjud (agar siz barcha oltita erkinlik darajasini olib tashlasangiz, siz qattiq ulanishga ega bo'lasiz).
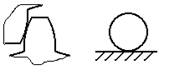
2-rasmda ba'zi kinematik juftliklarga misollar ko'rsatilgan.
| a) |
S \u003d 1 \u003d\u003e I sinf.
|
S \u003d 2 \u003d\u003e II sinf.
|
S \u003d 3 \u003d\u003e III sinf.
|
 b)
b)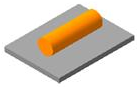 ichida)
ichida)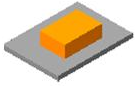 G)
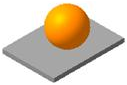
G)2-rasm
Samolyotga nisbatan to'p (2b-rasm), undan uzoqlashmasdan, bajarishi mumkin aylanish harakatlari barcha uchta koordinata o'qi atrofida, shuningdek, "X" va "Y" o'qlari bo'ylab harakatlaning. "Z" o'qi bo'ylab harakatlanayotganda, to'p samolyotdan tushadi, ya'ni. ikkita bepul havola bo'ladi - kinematik juftlik mavjud bo'lishni to'xtatadi. Shunday qilib, bitta ulanish bog'lanishlarning nisbiy harakatiga o'rnatiladi - bu I sinf kinematik juftlik.
Xuddi shunday, kontaktning tabiatini buzmasdan, silindrni "Z" o'qi bo'ylab harakatlantirish va "Y" o'qi atrofida aylantirish mumkin emas (2c-rasm), ya'ni. obligatsiyalar soni ikkita - sinf II juftligi. Boshqa tekislikka nisbatan tekislik "X" va "Y" o'qlari bo'ylab translyatsion ravishda harakatlanishi mumkin, shuningdek, kontaktning tabiatini buzmasdan "Z" o'qi atrofida aylanishi mumkin. "Z" o'qi bo'ylab translatsion harakat va "X" va "Y" o'qlari atrofida aylanish harakatlari mumkin emas (2d-rasm). Shunday qilib, bog'lanishlar soni uchta - sinf III kinematik juftlik.
Eslatma: agar kinematik juftlik ikkita funktsiyaga ega bo'lsa bog'liq harakatlar(birisiz ikkinchisi mavjud bo'lmaydi), ular bir daraja erkinlik beradi.
Misol uchun, murvat va gayka beshinchi sinfning kinematik juftligini tashkil qiladi. Bunday holda, sobit murvat bilan gaykaning ikkita harakati mavjud - murvat o'qi atrofida aylanish harakati va bu o'q bo'ylab tarjima harakati, lekin siz gaykani o'q bo'ylab uni aylantirmasdan harakatlantira olmaysiz yoki gaykani shunday aylantira olmaysiz. o'qi bo'ylab harakat qilmasligi. Bundan tashqari, ipning parametrlarini bilib, burilish burchagi va gaykaning tarjima harakati o'rtasidagi munosabatni aniqlash oson.
Bu ikki harakat bitta murakkab (bu holda spiral) harakatni hosil qiladi. Bu bog'lanishlarning nisbiy harakatida bir erkinlik darajasini belgilaydi, ya'ni. havolalar soni - beshta;
2) kinematik juftlikda bog'langan zvenolarning kontakt xarakteriga ko'ra. Shu asosda kinematik juftliklar yuqori va pastki qismlarga bo'linadi. Yuqori juftliklar ushbu kinematik juftlikni tashkil etuvchi bog'lanishlarning nuqta yoki chiziqli kontaktiga ega.
Pastki juftlikda bo'g'inlar ba'zi bir sirt bo'ylab (muayyan holatda, tekislik bo'ylab) bir-biri bilan aloqa qiladi.
Pastki kinematik juftliklar katta yuk ko'tarish qobiliyatiga ega, tk. katta aloqa maydoniga ega (yuqori juftlikda aloqa maydoni nazariy jihatdan nolga teng, lekin aslida u kinematik juftlik elementlari - "aloqa joyi" tufayli olinadi). Ammo pastki juftliklarda bitta sirt. ish paytida boshqasiga nisbatan siljiydi, yuqori juftlarda esa u ham sirpanish, ham dumalab turishi mumkin.
Qoidaga ko'ra, toymasin qarshilik bir sirtni boshqasiga nisbatan siljitish qarshiligidan kattaroqdir, ya'ni. Yuqori juftlikdagi ishqalanish yo'qotishlari (faqat dumaloq ishlatilsa) pastki juftlikdan kamroq (shuning uchun koeffitsientni oshirish uchun) foydali harakat silliq rulmanlar odatda rulmanlar bilan almashtiriladi).
2b va 2c-rasmlarda ko'rsatilgan kinematik juftliklar eng yuqori, 2d-rasmdagi juftlik esa eng past kinematik juftlikdir;
3) kinematik juftlikni tashkil etuvchi zvenolarga mansub nuqtalarning harakat traektoriyasi bo'ylab. Shu asosda fazoviy va tekis kinematik juftliklar ajratiladi.
Yassi kinematik juftlikda barcha nuqtalar bir yoki parallel tekislikda harakatlanadi va ularning harakat traektoriyalari tekis egri chiziqlardir. Fazoviy juftliklarda nuqtalar turli tekisliklarda harakatlanadi va fazoviy egri shaklida traektoriyalarga ega.
Amalda qo'llaniladigan mexanizmlarning katta qismi tekis mexanizmlardir (I.I.Artobolevskiy tasnifiga ko'ra - uchinchi oila mexanizmlari), shuning uchun tekis kinematik juftlarni batafsilroq ko'rib chiqish kerak.
Tekislikda joylashtirilgan erkin zveno uch erkinlik darajasiga ega (koordinata o'qlari bo'ylab translatsion harakat va berilgan tekislikka perpendikulyar o'q atrofida aylanish harakati). Shunday qilib, havolani tekislikka joylashtirish undan uch darajadagi erkinlikni olib tashlaydi (uchta bog'lanishni o'rnatadi). Ammo bu bog'lanishning kinematik juftlikdagi boshqasi bilan bog'lanishi nisbiy harakatga ko'proq bog'lanishlarni keltirib chiqaradi (minimal raqam 1). Natijada, nisbiy harakatda ikki yoki bir daraja erkinlikka ega bo'lgan tekislikda faqat kinematik juftliklar mavjud bo'lishi mumkin.
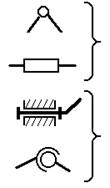
Umumiy tasnifga ko'ra, bu to'rtinchi va beshinchi sinflarning juftliklari. Beshinchi sinfning eng oddiy juftlari faqat bitta harakatni ta'minlaydi - aylanish yoki translatsiya (texnologiyada aylanma kinematik juftlik menteşe deb ataladi, tarjima juftligi tarjimali harakatlanuvchi havolaga o'xshab, ba'zan slayder deb ham ataladi).
Tekislikdagi nisbiy harakatdagi ikki erkinlik darajasi odatda ikkita aloqa profilini ta'minlaydi (kinematik diagrammada bir nuqtada aloqa; haqiqiy mexanizmda bu nuqtaga proyeksiya qilingan chiziq bo'lishi mumkin). Shunday qilib, beshinchi sinfning tekis kinematik juftlari (menteşeler va slayderlar) bir vaqtning o'zida pastki juftliklar va to'rtinchi sinfning kinematik juftlari yuqori juftliklardir.
3-rasmda tekis kinematik juftlarning sxematik ko'rinishi ko'rsatilgan.
4) kinematik juftlikda bog'langan zvenolarning yopilish xususiyatiga ko'ra. Bu jihatdan bir-biridan farq qiluvchi ikki turdagi kinematik juftliklar mavjud. Geometrik yopilgan kinematik juftliklar va kuch bilan yopilgan kinematik juftliklar.
Ijobiy qulflash bilan juftliklarda, ulanishlarning konfiguratsiyasi ularni ish paytida ajratishni oldini oladi. Misol uchun, birlashtiruvchi novda qopqog'i yoki boshqa har qanday ilmoqlar (qobiqli eshik, deraza oynasi bo'lgan deraza va boshqalar) yordamida krank miliga ulash novdasini ulash.
Quvvat pallasida juftlikda ish paytida ulanishlarning aloqasi doimiy ravishda ta'minlanadi faol kuch. 2-rasmda barcha kinematik juftliklar kuch bilan yopilgan juftlikdir va og'irlik yopilish kuchi sifatida ishlaydi. Agar og'irlik etarli bo'lmasa, unda bosim kuchini yaratish uchun odatda turli xil elastik elementlar (ko'pincha buloqlar) ishlatiladi.
MEXANIZMLARNING TUZILISHI
Asosiy tushunchalar va ta'riflar.
Terminlar tizimi har qanday bilimlar tizimini tavsiflashda yagona yondashuvni ta'minlaydi. Shuning uchun, keling, ishlatilgan so'zning ma'nosi va ma'nosini aniqlashdan boshlaylik.
Mexanizm - bir yoki bir nechta harakatni o'zgartirish uchun mo'ljallangan jismlar tizimi qattiq moddalar va (yoki) ularga ta'sir qiluvchi kuchlar boshqa jismlarning va (yoki) kuchlarning zarur harakatlariga. Mexanizmlar va mashinalar nazariyasida qattiq jismlar deganda mutlaqo qattiq va deformatsiyalanuvchi jismlar tushuniladi.
Avtomobil- energiya, materiallar va ma'lumotlarni aylantirish uchun mexanik harakatlarni amalga oshiradigan qurilma. Materiallar deganda mehnat ob'ektlari tushuniladi: qayta ishlangan mahsulotlar, tashilgan tovarlar va boshqalar.
Tafsilot - yig'ish operatsiyalaridan foydalanmasdan, nomi va markasi bo'yicha yagona materialdan tayyorlangan mahsulot.
Havola berilgan harakat transformatsiyasida ishtirok etuvchi qattiq jismdir. Bog'lanish o'zaro nisbiy harakatga ega bo'lmagan bir nechta qismlardan iborat bo'lishi mumkin.
Raf - shartli ravishda qat'iy qabul qilingan havola.
Kirish havolasi- harakat haqida xabar beriladigan havola, u mexanizm tomonidan boshqa bo'g'inlarning kerakli harakatlariga aylantiriladi.
chiqish havolasi- mexanizm mo'ljallangan harakatni amalga oshiradigan aloqa.
Boshlang'ich havola - mexanizmning bir yoki bir nechta umumlashtirilgan koordinatalari tayinlangan havola.
Umumlashtirilgan mexanizm koordinatasi- mexanizmning barcha bo'g'inlarining rafga nisbatan o'rnini aniqlaydigan mustaqil koordinatalarning har biri.
Mexanizmning erkinlik darajalari soni- mexanizmning umumlashtirilgan koordinatalari soni.
Ulanish- mexanizmning erkinlik darajalari sonini kamaytiradigan har qanday holat. Har qanday aloqani uning harakatini reaktsiya bilan almashtirish orqali bekor qilish mumkin.
Ortiqcha ulanish– barham berish mexanizm erkinlik darajalari sonini o‘zgartirmaydigan bog‘lanish.
Kinematik juftlik- mexanizmning ikkita qattiq jismining ulanishi, ularning berilgan nisbiy harakatini ta'minlaydi. Juftlikning mavjudligi sharti: ikkita bo'g'inning mavjudligi, ularning aloqasi va bog'lanishlarning nisbiy harakati.
Kinematik zanjir- bir-biri bilan kinematik juftliklarni hosil qiluvchi bog'lanishlar va (yoki) mexanizmning qattiq holat elementlari tizimi. Kinematik zanjirlarni farqlang ochiq va yopiq. ochiq faqat bitta kinematik juftlikka kiritilgan kamida bitta bog'lanishga ega bo'lgan bunday kinematik zanjir deyiladi. Da yopiq zanjirda kinematik juftlarning erkin elementlariga ega bo'lgan hech qanday aloqa yo'q. Bunday zanjirning har bir bo'g'ini kamida ikkita juftlikka kiritilgan.
mexanizm elementi- bir-biri bilan bevosita aloqada bo'lmagan uning bo'g'inlarining o'zaro ta'sirini ta'minlaydigan mexanizmning qattiq, suyuq yoki gazli tarkibiy qismi.
Kinematik juftlik interfeysi elementi- boshqa ikkita jismning juftlashuvchi elementlari tomonidan hosil qilingan umumiy sirt, chiziq yoki nuqta.
Kinematik juftlikning erkinlik darajalari (harakatchanlik) soni (N)- kinematik juftliklar bog'lanishlarining nisbiy holatini tavsiflash uchun zarur bo'lgan mustaqil koordinatalar soni.
Ma'lumki, kosmosda erkin harakatlanuvchi jism olti erkinlik darajasiga ega. Aloqa shartlari soni S kinematik juftlik zvenosining nisbiy harakati ustiga qo'yilgani ichida o'zgarishi mumkin. Bir, ikki, uch, to'rt va beshta harakatlanuvchi kinematik juftliklar mavjud. Shunday qilib, biz munosabatlarga egamiz H = 6 - S.
Yagona harakatlanuvchi juftlik- bog'langan qattiq jismlarning nisbiy harakatida bir darajadagi erkinlik bilan kinematik juftlik.
Ikki tomonlama harakatlanuvchi juftlik- bog'langan qattiq jismlarning nisbiy harakatida ikki darajali erkinlik bilan kinematik juftlik.
Uch harakatlanuvchi juftlik- bog'langan qattiq jismlarning nisbiy harakatida uch erkinlik darajasiga ega kinematik juftlik.
To'rtta harakatlanuvchi juftlik- bog'langan qattiq jismlarning nisbiy harakatida to'rtta erkinlik darajasiga ega kinematik juftlik.
Beshta harakatlanuvchi juftlik- bog'langan qattiq jismlarning nisbiy harakatida beshta erkinlik darajasiga ega kinematik juftlik.
Strukturaviy formula – algebraik ifoda, bu mexanizmning erkinlik darajalari soni, harakatlanuvchi aloqalar soni, kinematik juftlarning soni va harakatchanligi o'rtasidagi munosabatni o'rnatadi.
Assura guruhi- kinematik zanjir, uning mexanizmga ulanishi yoki uning uzilishi bir xil xususiyatlarga ega bo'lgan boshqa zanjirlarga bo'linmaydigan dastlabki mexanizmning harakatchanligiga teng harakatchanlikka ega mexanizmni tashkil qiladi.
Masshtab omili- raqamli qiymatning nisbati jismoniy miqdor unga xos bo'lgan birliklarda ushbu qiymatni tasvirlaydigan segment uzunligiga (mm) (diagrammada, grafikda va boshqalarda).
Masshtab masshtab koeffitsientining o'zaro nisbati hisoblanadi.
Kinematik juftlarning tasnifi
1. Raqamga qarab H farqlash bir, ikki, uch, to'rt va beshta harakatlanuvchi kinematik juftliklar. Cheklovchi tenglamalar soni sinf raqami sifatida qabul qilinadi.
2. Bog'lanish elementlarining (aniqrog'i, elementlarning turi) aloqa tabiati bo'yicha juftliklar quyidagilarga bo'linadi. pastroq va ichida yuqoriroq(F. Relo taklifi). Kimga pastroq elementlari sirt bo'lgan kinematik juftlarni o'z ichiga oladi (1.2-rasm). Elementlar yuqoriroq juftliklar chiziqlar yoki nuqtalardir (1.2-rasm).
3. Juftlanishning tabiati bo'yicha kinematik juftliklar kuch bilan yopilishi (bog'larning aloqasi qandaydir kuch ta'sirida ta'minlanadi, masalan, og'irlik yoki prujina) va kinematik (bo'g'inlarning doimiy aloqasiga erishiladi) bilan ajralib turadi. elementlarning strukturaviy shakli tufayli).
4. Bog`lanishlarning nisbiy harakati xarakteriga ko`ra kinematik juftliklar translatsion, aylanma, spiral, silindrsimon, sferik, planarga bo`linadi.
Shaklda. 1.1 bitta harakatlanuvchi juftlarni (V sinfning kinematik juftlarini) ko'rsatadi, keling, ularni batafsil ko'rib chiqaylik.
|
|||||
|
|||||
|
|||||
|
Bir marta harakatlanuvchi juftlik:
1) aylanish(1.1-rasm. a) - silindrsimon ilgak. Ulanishning beshta sharti qo'yiladi: aylanishdan tashqari barcha harakatlar chiqarib tashlanadi.
2) Tarjimaviy(1.1-rasm. b) - ulanishning beshta sharti qo'yiladi: bitta tarjimadan tashqari barcha harakatlar chiqarib tashlanadi.
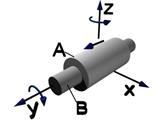
3) vint(1.1-rasm. v) - ulanishning beshta sharti qo'yiladi: tarjimadan tashqari barcha harakatlar chiqarib tashlanadi. (Aylanish erkinlik darajalarini kiritmaydi, chunki bu holda tarjima va aylanish harakatlari mustaqil emas).
Shaklda. 1.2 juftlarni ko'rsatadi ikki, uch, to'rt va beshta harakatlanuvchi(IV, III, II va I sinflarning kinematik juftlari) biz ularni batafsilroq ko'rib chiqamiz.
|
|
|
||||||
|
||||||||
|
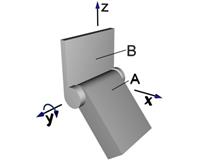
Ikki harakatlanuvchi juftlik(1.2.a-rasm) - rolikdagi vtulka. Ulanishning to'rtta sharti qo'yiladi, OX va OZ o'qlari bo'ylab tarjima va aylanish harakatlari istisno qilinadi.
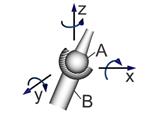
Uch harakatlanuvchi juftlik(1.2.b-rasm) - sharsimon silindr. Uchta ulanish sharti qo'yiladi: barcha uch eksa bo'ylab translatsion harakatlar bundan mustasno.
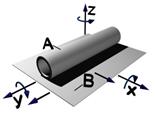
To'rtta harakatlanuvchi juftlik(1.2.v-rasm) - tekislikdagi silindr. Ikki ulanish sharti qo'yiladi: O Z o'qi bo'ylab translatsiya harakati va O X o'qi atrofida aylanish harakati bundan mustasno.
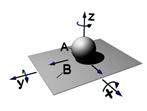
Beshta harakatlanuvchi juftlik(1.2.d-rasm) - tekislikdagi to'p. Bitta ulanish sharti qo'yiladi: O Z o'qi bo'ylab translatsiya harakati istisno qilinadi.
Kinematik juftlik aloqa shartlariga ko'ra ularning nisbiy harakatiga cheklovlar qo'yadigan ikkita qattiq bo'g'inning harakatlanuvchi konjugasiyasi. Bog'lanish shartlarining har biri bir darajadagi erkinlikni yo'q qiladi ,
ya'ni fazoda 6 ta mustaqil nisbiy harakatdan birining imkoniyati. To'rtburchaklar koordinatalar tizimida 3 ta mumkin tarjima harakatlari(3 ta koordinata o'qi yo'nalishi bo'yicha) va 3 ta aylanish (bu o'qlar atrofida). Aloqa shartlari soniga ko'ra S K. p.lar 5 ta sinfga boʻlingan. Erkinlik darajalari soni K. p. W=6-S. Har bir sinf doirasida K. buyumlari boʻgʻinlarning qolgan mumkin boʻlgan nisbiy harakatlariga koʻra turlarga boʻlinadi. Bog'lanishlarning aloqa tabiatiga ko'ra, pastki K. p.lar - sirt bo'ylab aloqa bilan va yuqoriroq - chiziqlar bo'ylab yoki nuqtalarda aloqa bilan ajralib turadi. Yuqori K. ashyolari barcha 5 sinf va koʻp turlar uchun mumkin; pastki - faqat 3 sinf va 6 tur ( 1-rasm
). Geometrik jihatdan yopiq va yopiq bo'lmagan C.P o'rtasida ham farqlanadi. guruch. bitta
), ikkinchidan, yopish uchun bosim kuchi kerak, deb ataladi. kuch bilan yopish (masalan, kamera mexanizmida). An'anaviy ravishda bir nechta oraliq prokat elementlari (masalan, sharli va rulmanli podshipniklar) va oraliq deformatsiyalanuvchi elementlari (masalan, tekis prujinali qurilmalarning orqa tebranishsiz menteşalari deb ataladigan) bilan harakatlanuvchi muftalar k deb ataladi. guruch. 2
). N. Ya. Niberg.
Katta Sovet ensiklopediyasi. - M.: Sovet Entsiklopediyasi. 1969-1978 .
Boshqa lug'atlarda "Kinematik juftlik" nima ekanligini ko'ring:
Mexanizmning 2 ta bo'g'inining ulanishi, ularning nisbiy harakatlanishiga imkon beradi. Bog'lanishlar sirtga tegib turadigan kinematik juftlik pastki deb ataladi (masalan, aylanma menteşe, tarjima slayderi va yo'riqnoma). Kinematik juftlik, ...... Katta ensiklopedik lug'at
kinematik juftlik- juftlik Ikki qo'shni bo'g'inning ulanishi, ularning nisbiy harakatlanishiga imkon beradi. [Tavsiya etilgan shartlar toʻplami. 99-son. Mexanizmlar va mashinalar nazariyasi. SSSR Fanlar akademiyasi. Ilmiy-texnik terminologiya qo'mitasi. 1984] Mavzular nazariyasi ...... Texnik tarjimon uchun qo'llanma- kinematinė pora statusas T sritis fizika atitikmenys: angl. kinematik juftlik vok. kinematisches Elementenpaar, n rus. kinematik juftlik, f pranc. paaire cinématique, f … Fizikos terminų žodynas
Ikki qo'shni bog'lanishning ulanishi, ularni bog'lash imkonini beradi. tirbandlik. Bog'lanish boshqa havola bilan aloqa qilishi mumkin bo'lgan yuzalar, chiziqlar, nuqtalar deyiladi. ulanish elementlari. K. p. pastki (kontakt yuzalar) va yuqori ... ... bo'linadi. Katta ensiklopedik politexnika lug'ati
kinematik juftlik- kinematik juftlik Mexanizmning ikkita qattiq tanasining ulanishi, ularning berilgan nisbiy harakatini ta'minlaydi. Kod IFToMM: 1.2.3 Bo'lim: MEXANIZMLAR VA MOSHINALAR NAZARIYASI HAQIDA UMUMIY TUSHUNCHALAR ... Mexanizmlar va mashinalar nazariyasi
juft- kinematik juftlik; juft Ikki qoʻshni boʻgʻinning ulanishi, ulardan nisbiy harakatlanish imkonini beradi. juft kuchlar; juftlik tizimi ikkinchi parallel kuchlar, mutlaq qiymatda teng va qarama-qarshi yo'nalishda yo'naltirilgan ...
yuqori juftlik- Bog'lanishlarning kerakli nisbiy harakatini faqat uning elementlariga chiziqlar bo'ylab va nuqtalarda tegizish orqali olish mumkin bo'lgan kinematik juftlik ... Politexnik terminologik izohli lug'at





