Konceptet bazë dhe një shembull i të bërit punë të pavarur
lidhjen
Mekanizmi i levës - një mekanizëm, lidhjet e të cilit formojnë vetëm çifte rrotulluese, përkthimore, cilindrike dhe sferike. Një shembull i një mekanizmi levash është një mekanizëm me levë me kamerë - një pajisje që është një lidhje e mekanizmave të levës me mekanizmat e kamerës. Lidhje të tilla bëhen në dy versione:
1) konsistente;
2) paralele.
Në shumicën e rasteve, mekanizmi i levës me kamerë kuptohet si lidhjet paralele. Mekanizmat e levës së kamerës përdoren për të ndryshuar gjatësinë e lidhjeve të mekanizmave të levës në procesin e lëvizjes dhe, në përputhje me rrethanat, për të marrë ligjet e specifikuara të lëvizjes dhe për të përmirësuar performancën. Mekanizmat e levës përdoren më gjerësisht në kombinim me mekanizmat e ingranazheve ose mekanizmat e levës së marsheve. Ky lloj mekanizmash janë pajisje që përmbajnë mekanizma ingranazhesh dhe levash që ndërveprojnë me njëri-tjetrin dhe lidhjet e tyre mund të jenë serike ose paralele.
Në veglat e ndryshme të makinerive, makineritë dhe sistemet e kontrollit automatik në industritë inxhinierike, përdoren kryesisht mekanizmat e levës së marsheve të lidhura paralelisht. Në veçanti, përdoret i ashtuquajturi ingranazh romak - një mekanizëm me shtatë lidhje me një rrëshqitës të drejtuar përmes një levë përmbledhëse dhe dy shufra lidhëse nga dy ingranazhe që lidhen me njëri-tjetrin. Në një mekanizëm të tillë, ose një levë ose një ingranazh mund të jetë ose një makinë ose një skllav. Mekanizmat e levës së dhëmbëve në një numër variantesh zakonisht përmbajnë dy palë ingranazhesh ndërvepruese, njëra prej të cilave është e lidhur me një lidhje të mekanizmit të levës. Në përgjithësi, mekanizmat e levës së ingranazheve bëjnë të mundur marrjen e ligjeve të ndryshme të lëvizjes së lidhjeve, përmirësimin karakteristikat e fuqisë i gjithë mekanizmi. Në shumicën e rasteve, mekanizmat e levës së ingranazheve përdoren si udhëzues dhe mekanizma transmetimi (veçanërisht në linjat automatike të makinave të përdorura në shumë sektorë të kompleksit industrial dhe ekonomik të Rusisë).
autor Ekipi i autorëveMekanizmi i gocës së gocës Mekanizmi i gocës së gocës është një pajisje për tërheqjen ciklike të një shiriti të shpuar (në veçanti, shiritit filmik në projektorë filmash ose në kamera filmike). Një mekanizëm i tillë kryen lëvizje me ndërprerje të njëanshme. Si një mekanizëm gocë e moluskut
Nga libri Enciklopedia e Madhe teknologjisë autor Ekipi i autorëveMekanizmi i ingranazheve Një mekanizëm kompleks ingranazhi është një pajisje me ingranazhe, në të cilën përfshihen më shumë se dy ingranazhe. Pajisjet mund të zhvillohen si një lloj teknologjie strukturore, ashtu edhe me ndihmën e njëpasnjëshme,
Nga libri Enciklopedia e Madhe e Teknologjisë autor Ekipi i autorëve Nga libri Enciklopedia e Madhe e Teknologjisë autor Ekipi i autorëveMekanizmi i kamerës Një mekanizëm me kamerë është një mekanizëm që përfshin një kamerë. Në sektorë të ndryshëm të kompleksit industrial dhe ekonomik të Rusisë, mekanizmat e kamerës përdoren gjerësisht në versione të ndryshme Opsioni i parë: në mekanizëm, kamera ka një funksion
Nga libri Enciklopedia e Madhe e Teknologjisë autor Ekipi i autorëveMekanizmi lëkundës Mekanizmi lëkundës është një mekanizëm levë, i cili përfshin një lëkundës. Në makina të ndryshme përdoren gjerësisht veglat e makinerive dhe pajisjet e tjera lloje te ndryshme mekanizëm lëkundëse: 1) mekanizëm lëkundës-rrëshqitës; 2) manovër-roker
Nga libri Enciklopedia e Madhe e Teknologjisë autor Ekipi i autorëveMekanizmi Një mekanizëm është një sistem i përbërë nga disa elementë (ose lidhje) dhe i projektuar për të kthyer lëvizjen e një ose më shumë elementeve të ngurtë në lëvizjet e nevojshme të elementeve të tjerë të këtij sistemi. Mekanizmat karakterizohen nga: 1) mekanike
Nga libri Enciklopedia e Madhe e Teknologjisë autor Ekipi i autorëveMekanizmi i levës Një mekanizëm levë është një mekanizëm, lidhjet e të cilit formojnë vetëm çifte rrotulluese, përkthimore, cilindrike dhe sferike. Një shembull i një mekanizmi levë është një mekanizëm me levë me kamerë - një pajisje që është një lidhje
Nga libri Enciklopedia e Madhe e Teknologjisë autor Ekipi i autorëveMekanizmi i palosjes Mekanizmi i palosjes është një pajisje e krijuar për të palosur një fletë letre dhe përdoret gjerësisht në punët e printimit.Ky mekanizëm funksionon si më poshtë: një fletë letre lëviz kur cilindri i ushqimit rrotullohet në
Nga libri Enciklopedia e Madhe e Teknologjisë autor Ekipi i autorëveMekanizmi i fërkimit Një mekanizëm fërkimi është një pajisje në të cilën transmetimi i lëvizjes, nxitimit ose frenimit kryhet për shkak të forcave të fërkimit midis elementëve të shtypur kundër njëri-tjetrit. Në një mekanizëm fërkimi të përbërë nga elementë të ngurtë (në një transmetim, tufë,
6.1. Paraqitja e problemit, llojet dhe metodat e sintezës
Problemet e sintezës së mekanizmave të levës në rastin e përgjithshëm janë probleme komplekse të projektimit optimal, duke përfshirë fazat e llogaritjes strukturore, kinematike dhe dinamike. Prandaj, për të thjeshtuar zgjidhjen, merren parasysh probleme të veçanta, në të cilat merren parasysh vetëm disa kushte (bazë) të projektimit.
Në varësi të të dhënave fillestare, dallohen llojet e mëposhtme të sintezës:
Gjeometrike, kur jepen pozicione individuale të lidhjeve ose trajektoreve të pikave individuale;
Kinematike, kur jepen shpejtësi, nxitime ose raporte të caktuara të tyre;
Dinamik, kur jepen forcat vepruese ose vendosen disa kufizime në parametrat dinamikë.
Metodat e sintezës përfshijnë:
a) eksperimentale, kur dimensionet e lidhjeve zgjidhen eksperimentalisht për të zbatuar një trajektore të caktuar;
b) grafik;
c) analitike.
Kombinime të ndryshme të llojeve dhe metodave të sintezës të listuara më sipër janë të mundshme.
6.2. Zgjidhja e problemeve të sintezës optimale të mekanizmave të shufrës
Kur vendosni problemin e sintezës optimale, duhet bërë dallimi midis parametrave të hyrjes dhe daljes.
Parametrat e hyrjes janë parametra të vendosur fillimisht (madhësitë e lidhjeve, shpejtësitë, nxitimet ose raportet e tyre).
Parametrat e daljes janë parametrat e përcaktuar si rezultat i zgjidhjes së problemit.
Gjatë sintetizimit, është e nevojshme të merren parasysh një sërë kërkesash të një natyre kinematike, konstruktive, teknologjike, etj., Ndër të cilat njëra, si rregull, është kryesore, dhe pjesa tjetër janë dytësore (shtesë). Nëse kërkesa kryesore shkruhet matematikisht si funksion , ku  - parametrat e daljes, atëherë thirret një funksion i tillë funksioni i qëllimit(objektivi), ndërsa kushtet shtesë, të shprehura si , quhen kufizime.
- parametrat e daljes, atëherë thirret një funksion i tillë funksioni i qëllimit(objektivi), ndërsa kushtet shtesë, të shprehura si , quhen kufizime.
Detyra e sintezës optimale është të sigurojë një vlerë ekstreme të Z, duke iu nënshtruar të gjitha kufizimeve.
Për shembull, duke shprehur peshën e një mekanizmi si një funksion Z të parametrave të tij (gjatësitë e lidhjeve), mund të zgjidhet problemi i minimizimit të Z në kushtet e ekzistencës së tij. Këto kushte përfshijnë kushtet për kthimin e manivelit në një lidhje të artikuluar me katër bar, kushtin për ruajtjen e një këndi të caktuar presioni dhe një sërë të tjerash.
Me një numër të vogël të parametrave të prodhimit, zgjidhja e problemit të optimizimit mund të merret në formë analitike. Përndryshe, përdoren metoda numerike të kërkimit të drejtuar, të rastësishëm ose të kombinuar për zgjidhje optimale.
6.3. Kushtet për rrotullimin e fiksimit në një lidhje të artikuluar me katër lidhje
P  Kur hartoni (sintetizoni) një mekanizëm me katër varëse, një nga kushtet e marra parasysh mund të jetë fiksimi i lidhjeve, domethënë prania e një ose dy fiksimeve. Varet nga raporti i gjatësisë së lidhjeve. Për shembull, në mënyrë që lidhja AB e një lidhjeje me katër lidhje (Fig. 37) të bëhet një manivë, ajo duhet të kalojë në mënyrë sekuenciale nëpër dy pozicione ekstreme. Duke përdorur tre pozicionet e mekanizmit, marrim kushtet e mëposhtme:
Kur hartoni (sintetizoni) një mekanizëm me katër varëse, një nga kushtet e marra parasysh mund të jetë fiksimi i lidhjeve, domethënë prania e një ose dy fiksimeve. Varet nga raporti i gjatësisë së lidhjeve. Për shembull, në mënyrë që lidhja AB e një lidhjeje me katër lidhje (Fig. 37) të bëhet një manivë, ajo duhet të kalojë në mënyrë sekuenciale nëpër dy pozicione ekstreme. Duke përdorur tre pozicionet e mekanizmit, marrim kushtet e mëposhtme:
për pozicionet 1, 2, 3, duke treguar më parë gjatësinë e lidhjeve:
ku:
domethënë, shuma e gjatësive të fiksimit dhe çdo hallkë tjetër është më e vogël se shuma e lidhjeve të mbetura.
Shtojmë pabarazitë e fituara në çift dhe marrim:


 , d.m.th., fiksimi është lidhja më e shkurtër. Dhe nëse këto kushte nuk plotësohen, atëherë mekanizmi do të jetë ose me dy fiksime ose me dy rrotullime. Këto kushte përdoren në sintezën gjeometrike.
, d.m.th., fiksimi është lidhja më e shkurtër. Dhe nëse këto kushte nuk plotësohen, atëherë mekanizmi do të jetë ose me dy fiksime ose me dy rrotullime. Këto kushte përdoren në sintezën gjeometrike.
Agjencia Federale për Arsimin
Shtetit institucion arsimor arsimin e lartë profesional
"MATI" - Shteti rus Universiteti i Teknologjisë me emrin K.E. Tsiolkovsky
Departamenti i "Mekanikës së makinave dhe mekanizmave"
LLOGARITJA E FORCËS SË MEKANIZMAVE LEVE
Udhëzime për hartimin e kurseve mbi teorinë e mekanizmave dhe makinave
Përpiluar nga: Chufistov V.A. Shuvalova L.S.
Moskë 2006
1. OBJEKTIVAT DHE PËRMBAJTJA E LLOGARITJES SË FORCËS
Llogaritja e fuqisë së mekanizmave konsiston në përcaktimin e të gjitha forcave dhe momenteve të forcave të aplikuara në secilën lidhje të mekanizmit. Madhësia, drejtimi dhe pikat e zbatimit të forcave që veprojnë në lidhjet dhe çiftet kinematike duhet të njihen për llogaritjet e mëvonshme të forcës, rezistencës ndaj konsumit, besueshmërisë dhe për zgjidhjen e problemeve të tjera të projektimit të mekanizmave. Kur mekanizmi funksionon nën veprimin e të gjitha forcave të jashtme të aplikuara në lidhjet e tij, si dhe si rezultat i lëvizjes së pabarabartë të lidhjeve të tij në çiftet kinematike lindin forcat e reagimit, d.m.th. forcat e ndërveprimit ndërmjet lidhjeve. Forcat e reagimit në llogaritjen e forcës përcaktohen për të vlerësuar dhe siguruar funksionimin e mekanizmit, veçanërisht për zgjedhjen dhe llogaritjen e kushinetave.
Detyra kryesore e llogaritjes së forcës është përcaktimi i reaksionit në çiftet kinematike të mekanizmave, si dhe përcaktimi i forcës balancuese ose çifti i forcave (momenti balancues) dhe fuqia e motorit.
Llogaritja e forcës mund të kryhet me ose pa forca të fërkimit. Në shumicën e mekanizmave, humbjet për të kapërcyer fërkimin janë të vogla, dhe neglizhimi i tyre bën të mundur thjeshtimin dhe shkurtimin e ndjeshëm të llogaritjes. Llogaritja kinetostatike mund të kryhet me metodën e planeve të forcës ose me metodën e profesorit N.E. Zhukovsky.
Në projektin e kursit, llogaritja kinetostatike e mekanizmit kryhet për një pozicion të caktuar të mekanizmit në të dyja mënyrat. Rezultatet e marra krahasohen, dhe mospërputhja nuk duhet të kalojë 5%.
2. LLOGARITJA E FORCES SIPAS METODES TE PLANEVE TE FORCES
2.1 Informacion i përgjithshëm.
Metoda kinetostatike e llogaritjes së forcës bazohet në parimin d'Alembert, sipas të cilit ekuacionet e statikës mund të zbatohen në një sistem që lëviz me nxitim nëse ngarkesave statike që veprojnë në sistem u shtohen ngarkesa dinamike. Ngarkesat statike varen nga pesha e lidhjeve G i, rezistencat e dobishme dhe të dëmshme F. Dinamik
ngarkesat varen nga masat G g i , momentet e inercisë së lidhjeve I si , lineare
nxitimet e qendrave të masës së lidhjeve a si dhe nxitimet këndore të lidhjeve ε i .
Ngarkesa dinamike e çdo lidhjeje të një mekanizmi të sheshtë reduktohet në qendrën e tij të gravitetit dhe, në rastin e përgjithshëm, përbëhet nga vektori kryesor dhe momenti kryesor i forcave të inercisë. Moduli i forcës së inercisë së një lidhjeje që kryen një lëvizje paralele në plan ose që rrotullohet në mënyrë jo të njëtrajtshme rreth një boshti fiks llogaritet me formulën:
ku I si është momenti i inercisë së lidhjes në lidhje me qendrën e saj të gravitetit. Momenti drejtohet në drejtim të kundërt me nxitimin këndor të lidhjes M H i → − ε G i .
Në mungesë të forcave të fërkimit, supozohet se reagimi në çiftin kinematik të përkthimit është pingul me udhëzuesit. Nëse qendra e masës
i rrëshqitësit përkon me menteshën, me anë të së cilës rrëshqitësi lidhet me lidhjen e shufrës, reaksioni kalon nëpër menteshë dhe detyra e llogaritjes është gjetja e madhësisë së reaksionit. Nëse qendra e masës së rrëshqitësit nuk përkon me menteshën, detyra e llogaritjes është të përcaktohet madhësia e reaksionit dhe pika e aplikimit të tij. Reagimi në çiftin kinematik rrotullues zbatohet në qendër të menteshës dhe detyra e llogaritjes është përcaktimi i madhësisë dhe drejtimit të tij. Ndonjëherë këshillohet që një reagim i tillë të përfaqësohet në formën e dy komponentëve, njëra prej të cilëve drejtohet përgjatë lidhjes dhe quhet përbërës normal, dhe tjetra është pingul me të dhe quhet përbërës tangjent. Është zakon të caktohet reagimi i aplikuar në lidhjen "k" nga ana e lidhjes "i", R ik, dhe përbërësit e reaksionit
R n ik dhe R τ ik.
2.2 Të dhënat fillestare
Plani i mekanizmit.
Shpejtësia e rrotullimit këndor ω .
Koordinata e pozicionit të manivelit ϕ deg.
Pozicionet e qendrave të masës së lidhjeve S i.
Peshat G i dhe momentet e inercisë së lidhjeve I si .
Forca e dobishme e rezistencës (forca prerëse) F .
2.3. Sekuenca e llogaritjes së fuqisë.
Rendi i mëposhtëm i llogaritjes së forcës përcaktohet pa marrë parasysh forcat e fërkimit në çifte kinematike.
2.3.1. Ne vizatojmë një plan të mekanizmit për një pozicion të caktuar të fiksimit
në shkallë e zgjedhurμ l .
2.3.2. Ne aplikojmë peshat e lidhjeve G i në qendrat e masës S i dhe forcën e dobishme të rezistencës F në rrëshqitës. Të gjitha forcat përshkruhen pa shkallë si vektorë me të njëjtën gjatësi (15 - 20 mm).
2.3.3 Ne ndërtojmë një plan nxitimesh në një shkallë μ a m / (s2 mm). Këshillohet që plani i mekanizmit dhe plani i përshpejtimit të transferohen nga fleta e parë. Duke përdorur rregullin e ngjashmërisë, në planin e nxitimeve gjejmë vektorët që përfaqësojnë nxitimet e qendrave të masës së lidhjeve dhe me formulën
një si | = πS i μa ( | ||||
ne llogarisim madhësitë e nxitimeve vetë. Sipas formulës (1), ne përcaktojmë forcat e inercisë së lidhjeve, i zbatojmë ato në qendrat e masës së lidhjeve, duke i drejtuar ato në drejtim të kundërt me vektorin a si.
Ne gjejmë madhësitë dhe drejtimet e nxitimeve këndore për lidhjet përkatëse:
εi= | një ti | |||
sipas formulës (2) - momentet e forcave të inercisë për të njëjtat lidhje dhe në formën e një shigjete rrethore i zbatojmë ato në lidhje. Në këtë rast, duhet të mbahet mend se momenti i forcave të inercisë drejtohet në drejtim të kundërt me nxitimin këndor të lidhjes
(pra për mekanizmin 2 ε 4 = 0 dhe M 4 = 0 ). Në fig. 1a ndërtohet plani i mekanizmit
1 me ngarkesa statike dhe dinamike të aplikuara në lidhjet e tij, në fig. 1b është plani i tij i nxitimit. Prandaj, për mekanizmin 2, plani i mekanizmit dhe plani i nxitimeve janë paraqitur në Fig. 2a,b, për mekanizmin 3 - në fig. 3a,b dhe për mekanizmin 4 - në fig. 4a,b




2.3.4. Ne shkëputim nga mekanizmi një grup strukturor i përbërë nga lidhjet 4 dhe 5. Për mekanizmat 1,3 dhe 4, kjo është diada 2 e një modifikimi të veçantë (Figurat 5a, 7a). Në mekanizmat 1 dhe 4, rrëshqitësi 5 lëviz përgjatë një udhëzuesi horizontal dhe qendra e tij e masës S 5 nuk përkon me menteshën E. Në mekanizmin 3
rrëshqitësi 5 lëviz përgjatë një udhëzuesi vertikal dhe qendrës së tij të masës S 5
përkon me menteshën E. Dyad 4-5 do të jetë në ekuilibër nëse në të zbatohen reagime nga ana e lidhjeve të hedhura - reagimi R 65 nga ana e raftit 6 në rrëshqitësin 5 dhe reagimi R 34 nga ana e prapaskena 3 te shufra lidhëse 4. Reagimi
komponenti tangjencial R τ 34 | pingul me lidhjen 4. |
||||||
Madhësia dhe drejtimi i reaksionit | R τ34 | përcaktoni nëse bëjmë një ekuacion |
|||||
e të gjitha forcave të aplikuara në lidhjen 4 në lidhje me menteshën E: |
|||||||
Σ Μ (4 yje) = Ο → R τ 34 ; | |||||||
h + G h− | M 4 − R τ | DE = 0. | |||||
R τ = U 4 h 1 + G 4 h 2 - M 4 | μ l . | ||||||
Në ekuacionin (7) forcat zëvendësohen në N, krahët e forcave në mm, momenti i inercisë Μ 4 në Nm, shkalla e planit të dyadës -μ l në m/mm. Nëse përgjigja është negative, drejtimi i reaksionit Rτ 34 duhet të ndryshohet.
Reaksionet Rn 34 dhe R65 mund të gjenden nga ekuacioni vektorial shuma e forcave të aplikuara në diadën 4-5.
RG τ | +(F G +U | )+R | ||||||||
Mekanizmat e levave me çifte kinematike më të ulëta përdoren gjerësisht në inxhinierinë mekanike moderne. Përparësitë e mekanizmave të tillë përfshijnë: prodhimtarinë e lartë, mundësinë e përdorimit të kushinetave rrotulluese në nyjet kinematike, mundësinë e transferimit të forcave të mëdha me pak konsum në sipërfaqet kontaktuese, besueshmërinë dhe qëndrueshmërinë në funksionim. Këta mekanizma nuk kërkojnë pajisje që sigurojnë mbylljen e vazhdueshme të çifteve kinematike, ndryshe nga mekanizmat e kamerës.
Mekanizmat krijohen nga kushtet e përmbushjes së kërkesave të procesit teknologjik. Dizajni i mekanizmave është një detyrë komplekse, zgjidhja e së cilës mund të ndahet në dy faza. Faza e parë Sinteza e mekanizmave konsiston në zgjedhjen e një skeme kinematike që siguron formën dhe ligjin e kërkuar të lëvizjes së lidhjes së daljes dhe kushtet e përgjithshme për funksionimin e mekanizmave. Në faza e dytë Janë zhvilluar forma konstruktive të lidhjeve dhe çifteve kinematike për të siguruar forcën dhe besueshmërinë e mekanizmit. Kursi ynë mbulon vetëm faza e parë sintezë.
Skema e mekanizmit, si rregull, zgjidhet në bazë të përvojës, në lidhje me këto kushte specifike. Pastaj përcaktoni parametrat e sintezës, d.m.th. gjatësitë e lidhjeve dhe koordinatat e pikave që ofrojnë trajektoret e kërkuara etj., si dhe kushte shtesë të sintezës.
Kushtet shtesë të sintezës përfshijnë kusht ekzistenca e manivelit, si dhe gjendja e transferimit.
Kushti i transferimit të forcës
Është zakon të karakterizohet cilësia e transferimit të forcës në makina nga këndi i presionit λ, i përcaktuar pa marrë parasysh forcat e gravitetit të lidhjeve dhe forcat e inercisë.
këndi i presionit λ është një kënd akut midis vektorit të forcës që vepron në lidhjen e shtyrë nga ana e lidhjes së lëvizshme ngjitur me të dhe vektorit të shpejtësisë absolute të pikës së aplikimit të kësaj force.
Këndi i transmetimit të lëvizjes γ plotëson këndin e presionit deri në 90°:
γ = 90° - λ .
Në fazën e sintezës metrike, këndet maksimale të lejuara të presionit [λ max ] dhe transmetimi i lëvizjes [γ min ] janë të kufizuara, si rregull, duke i marrë ato:
[λ max ] ≤ 30° dhe [γ min ] ≥ 60° për një lidhje lineare të drejtuar, dhe
[λ max ] ≤ 40°...45° dhe [γ min ] ≥ 50°...45° për një lidhje me lëvizje rrotulluese.
Konsideroni kushtin për transferimin e forcave në një lidhje me katër varëse, e cila është në ekuilibër nën veprimin e momenteve të lëvizjes M D dhe momenti i rezistencës M C (Fig. 3.1). Këndi i presionit λ karakterizon raportin ndërmjet forcës së dobishme të tërheqjes F 23 cos λ tejkalimi i momentit të rezistencës M Me, dhe forcë F 23 e barabartë me
F 23 = M NGA /( l dielli cos λ).
Fig.3.1. Këndi λ i presionit në një menteshë me katër bar
Ndërsa këndi i presionit rritet, duhet të aplikohet më shumë forcë F 23 për të kapërcyer të njëjtin moment rezistence. Kjo çon në një rritje të reaksioneve në çifte kinematike dhe një ulje të efikasitetit të mekanizmit.
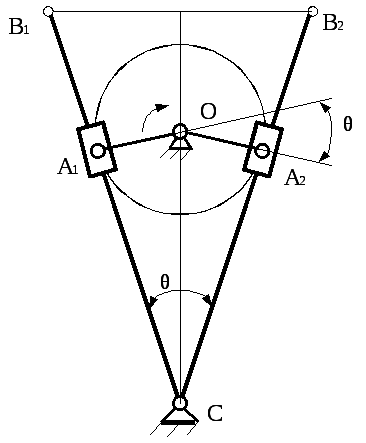
Ndërsa mekanizmi lëviz, këndi i presionit ndryshon. Ky kënd në katër lidhjet e varura arrin vlera ekstreme në pozicionet kur fiksohet OA të vendosura në të njëjtën linjë me raftin OS(Fig. 3.2).

Fig.3.2. Pozicionet e mekanizmit në të cilat arrijnë këndet e presionit
vlerat ekstreme
Në mekanizmin e rrëshqitësit të fiksimit, këndi i presionit fiton vlera ekstreme në pozicionet e treguara në fig. 3.3 kur maniak OA pingul me trajektoren e rrëshqitësit AT.

Oriz. 3.3. Pozicionet e mekanizmit në të cilin këndet e presionit
kanë vlera ekstreme.
Detyrat e sintezës kinematike të mekanizmave që hasen më shpesh në projektet e kursit janë konsideruar më poshtë.
Sinteza e një katër-lidhjeje të varur nga koeficienti i ndryshimit Shpejtësia mesatare dhe dy pozicione ekstreme të krahut lëkundës
Koeficient k ndryshimet në shpejtësinë mesatare të lidhjes së drejtuar është e barabartë me k = V C 2 – 1 / V C 1 – 2 ,
ku V C 1 – 2 − shpejtësia mesatare e vijës së pikës NGA(Fig. 3.4) gjatë goditjes së punës, V C 2 – 1 − e njëjta gjë për të kundërtën.
Pranoje k> 1, pasi gjatë projektimit të mekanizmave, si rregull, koha e kthimit në pozicionin fillestar merret më pak se koha e goditjes së punës, prandaj k > 1.
Është e lehtë ta vërtetosh këtë k= (180° + θ) / (180° - θ).
Nga ku θ = 180° ( k −1) /(k +1),
ku q − këndi ndërmjet pozicioneve të shufrës lidhëse para Krishtit në fillim dhe në fund të rrjedhës së punës.
Le të prezantojmë shënimin:
l 1 - gjatësia e fiksimit AB,(shih fig. 3.4); l 2 - gjatësia e shufrës lidhëse dielli;
l 3 - gjatësia e rrotullës CD; l 4 - distanca midis mbështetësve (gjatësia e raftit PORD).

Oriz. 3.4. Skema e mekanizmit në pozicionet që korrespondojnë me vlerat e këndeve të dhëna ψ
Jepen këndet ψ 1 dhe ψ 2 , si dhe koeficienti k, përshkruajnë dy pozicione ekstreme të rrotulluesit CD(Fig. 3.5).
pikë NGA 1 dhe NGA 2 lidheni me një vijë të drejtë. Llogaritni këndin q midis pozicioneve ekstreme të shufrës lidhëse dielli. Në pikën NGA 2 ndërto një kënd γ = 90° −
θ, dhe nga pika NGA 1 ulni pingulën me vijën NGA 1 NGA 2 në kryqëzimin me vijën e tërhequr nga pika NGA 2 dhe duke formuar këndin γ. Ne shënojmë pikën e kryqëzimit të këtyre vijave O. Natyrisht, në një trekëndësh kënddrejtë ONGA 1 NGA 2 qoshe NGA 1 OS 2 = θ. Tre pika O, NGA 1 dhe NGA 2 përshkruani një rreth. Këndi i brendashkruar me kulm në një pikë O mbështetet në hark  dhe është e barabartë me këndin θ, si dhe të gjitha këndet e brendashkruara të bazuara në të njëjtin hark. Ne zgjedhim në një rreth të përqendruar në një pikë O pikë arbitrare POR dhe e lidhim me segmente të drejta me pika NGA 1 dhe NGA 2. Si rezultat, duke vendosur mbështetësin e manivelit në pikë POR, marrim një diagram të një mekanizmi me katër lidhje në pozicione ekstreme (shih Fig. 3.5).
dhe është e barabartë me këndin θ, si dhe të gjitha këndet e brendashkruara të bazuara në të njëjtin hark. Ne zgjedhim në një rreth të përqendruar në një pikë O pikë arbitrare POR dhe e lidhim me segmente të drejta me pika NGA 1 dhe NGA 2. Si rezultat, duke vendosur mbështetësin e manivelit në pikë POR, marrim një diagram të një mekanizmi me katër lidhje në pozicione ekstreme (shih Fig. 3.5).

Oriz. 3.5. Sinteza e një katerlidhjeje të varur nga koeficienti k
ndryshimet në shpejtësinë mesatare dhe dy pozicione ekstreme të rrotulluesit
Nga figura rezulton AC 1 = AT 1 NGA 1 −AB 1 = l 2 − l 1 ; AC 2 = AT 2 NGA 2 −AB 2 = l 2 + l 1 .
Ku l 1 = 0,5 (AC 2 −AC 1) μ l / 2; l 2 = AC 2 − l 1 .
Gjatësia e qëndrimit PORD = l 4 do të përcaktohet nga pozicioni i pikës POR.
Që nga pozicioni i pikës POR u zgjodh në mënyrë arbitrare, ekziston një multivariancë e zgjidhjes së problemit. Kjo ju lejon të vendosni kushte shtesë, për shembull, kushtin për transferimin e forcave, praninë ose mungesën e ekscentricitetit të vendndodhjes së mbështetësve në lidhje me boshtin koordinativ.
Sinteza e mekanizmit të lëkundës sipas Koeficientk ndryshimet
në prapaskenë me shpejtësi mesatare
Jepet: koeficienti k ndryshimet në shpejtësinë e udhëtimit dhe dy pozicione ekstreme të pikës AT prapaskenë dielli.
Konsideroni mekanizmin rrotullues në dy pozicione ekstreme (Fig. 3.6).
Oriz. 3.6. Sinteza e mekanizmit të lëkundës
Këndi midis pozicionit të fiksimit OA 2 dhe vazhdimi i fiksimit në pozicion OA 1 është e barabartë me θ = 180° ( k −1) /(k+1). qoshet AT 1 M B 2 dhe q do të jenë të barabartë me njëri-tjetrin, si kënde me brinjë pingule reciproke.
Në një vijë të drejtë AT 1 AT 2 ndërtojmë një trekëndësh dykëndësh me një kënd në kulm NGA e barabartë me këndin q. Në vijën e drejtë që ndan këndin q në gjysmë në një pikë arbitrare, zgjidhni një pikë O rreth të cilit rrotullohet fiksimi OA. duke rënë nga pika O pingul me një vijë AT 1 NGA(ose AT 2 NGA), gjeni gjatësinë e fiksimit OA. Mekanizmi i lëkundjes që rezulton do të plotësojë kushtet e dhëna. Ndërtimi i mekanizmit lëkundës sipas kushteve të dhëna është si më poshtë. pikë AT 1 dhe AT 2, pozicioni i të cilit është dhënë, ne do të lidhemi me një vijë të drejtë.
Sinteza e një mekanizmi rrëshqitës me fiksime
Ne pranojmë konventat e mëposhtme (Fig. 3.7):

Oriz. 3.7. Skema e mekanizmit të rrëshqitësit të fiksimit
r- gjatësia e manivelit OA;H- goditje me rrëshqitës; l- gjatësia e shufrës lidhëse AB;
e– deaksiale, d.m.th. kompensimi i rrugës së pikës AT rrëshqitës rreth boshtit Oh ;
L = l/ r- gjatësia relative e shufrës lidhëse;
ν = e/r– relativ deaksial;
h = H/ r- goditje relative e rrëshqitësit ;
λmax është këndi maksimal i presionit (shih Fig. 3.3);
k − koeficienti i ndryshimit në shpejtësinë mesatare të rrëshqitësit (shih § 3.1)
ψ 1 dhe ψ 2 - qoshe të mprehta i formuar nga fiksimi OA me drejtim Oh në pozicionet ekstreme të rrëshqitësit: φ 1 =  AT 1
Oh, φ 2 = AT 2
Oh
;
AT 1
Oh, φ 2 = AT 2
Oh
;
θ \u003d ψ 2 - ψ 1 - një kënd akut midis shufrave lidhës në pozicionet ekstreme të rrëshqitësit.
Detyra 1. E dhënë: Jo, L = l/ r.
Gjej: r; l; ׀λ max ׀.
gjatësia e manivelit OA: r = H / h. Gjatësia e shufrës lidhëse AB: l = L r.
Vlera më e madhe e këndit të presionit ׀ λ max ׀ = mëkat i harkut [(1 + ν) / L] .
Detyra 2. E dhënë: H,k, L= l/ r.
Gjej: r; l; e; ׀ λ max ׀.
Këndi akut midis shufrave lidhës në pozicionet ekstreme të rrëshqitësit
θ = 180 0 ∙( k–1)/(k+1).
Nga shprehja gjejmë goditjen relative të rrëshqitësit
h = {2∙} 0,5 .
Nga shprehja gjejmë relativin deaksial
ν = [( h –2)∙(L 2 –1)] 0,5 .
gjatësia e manivelit r = H/ h; gjatësia e shufrës lidhëse l = L r; desaksiale e =ν r.
Vlera më e madhe e këndit të presionit λ max = mëkat i harkut [(1 + ν) / L].





