Drugi uslov za ravnotežu tela. Uslovi ravnoteže za kruto tijelo
Sistem sila tzv. uravnotežen, ako pod dejstvom ovog sistema telo ostane u mirovanju.
Uslovi ravnoteže:
Prvi uslov ravnoteže čvrsto telo:
Za ravnotežu krutog tijela potrebno je da zbir spoljne sile primijenjena na tijelo bila je jednaka nuli.
Drugi uslov za ravnotežu krutog tijela:
Kada je kruto tijelo u ravnoteži, zbir momenata svih vanjskih sila koje na njega djeluju oko bilo koje ose jednak je nuli.
Opći uvjet ravnoteže za kruto tijelo:
Za ravnotežu krutog tijela, zbir vanjskih sila i zbir momenata sila koje djeluju na tijelo mora biti jednak nuli. Početna brzina centra mase i ugaona brzina rotacije tijela također moraju biti jednake nuli.
Teorema. Tri sile uravnotežuju kruto tijelo samo ako sve leže u istoj ravni.
11. Ravni sistem sila su sile u istoj ravni.
Tri oblika jednadžbi ravnoteže za ravan sistem:
Težište tijela.
centar gravitacije tijela konačne veličine naziva se tačka, u odnosu na koju je zbir momenata gravitacije svih čestica tijela jednak nuli. U ovom trenutku se primjenjuje sila gravitacije tijela. Težište tijela (ili sistema sila) obično se poklapa sa centrom mase tijela (ili sistema sila).
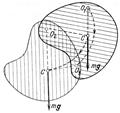
Težište ravne figure:
Praktičan način za pronalaženje centra mase ravne figure: objesite tijelo u polje gravitacije tako da se može slobodno rotirati oko tačke ovjesa O1 . Centar mase u ravnoteži OD je na istoj vertikali sa tačkom ovjesa (ispod nje), pošto je jednaka nuli
momenta gravitacije, koji se može smatrati primijenjenim u centru mase. Promjenom tačke ovjesa, na isti način nalazimo drugu pravu liniju Oko 2 C , prolazeći kroz centar mase. Položaj centra mase je dat tačkom njihovog presjeka.
Centar mase brzine:
Impuls sistema čestica jednak je proizvodu mase čitavog sistema M= Σmi na brzinu njegovog centra mase V :
![]()
Centar mase karakteriše kretanje sistema kao celine.
15. Trenje klizanja- trenje pri relativnom kretanju dodirujućih tijela.
Trenje mirovanja– trenje u odsustvu relativnog pomeranja tela u kontaktu.
sila trenja klizanja Ftr između površina dodirujućih tijela za vrijeme njihovog relativnog kretanja zavisi od sile normalne reakcije N , ili od sile normalnog pritiska PN , i Ftr=kN ili Ftr=kPn , gdje je k – koeficijent trenja klizanja , što zavisi od istih faktora kao i koeficijent statičkog trenja k0 , kao i na brzinu relativnog kretanja dodirujućih tijela.
16. Trenje kotrljanja je kotrljanje jednog tijela preko drugog. Sila trenja klizanja ne ovisi o veličini trljajućih površina, već samo o kvaliteti površina tijela za trljanje i o sili koja smanjuje trljajuće površine i usmjerena je okomito na njih. F=kN, gdje F- sila trenja, N je vrijednost normalne reakcije, a k je koeficijent trenja klizanja.
17. Ravnoteža tijela u prisustvu trenja- ovo je maksimalna sila prianjanja proporcionalna normalnom pritisku tijela na ravan.
Ugao između ukupne reakcije, izgrađene na najvećoj sili trenja za datu normalnu reakciju, i smjera normalne reakcije naziva se ugao trenja.
Konus s vrhom na mjestu primjene normalne reakcije hrapave površine, čija generatriksa čini kut trenja s ovim normalna reakcija, zove se frikcioni konus.
Dynamics.
1. AT dinamika razmatra se uticaj interakcija između tela na njihovo mehaničko kretanje.
Težina- ovo je slikarska karakteristika materijalne tačke. Masa je konstantna. Težina je aditivna (zbraja se)
snaga - ovo je vektor koji u potpunosti karakterizira interakciju materijalne točke na njoj s drugim materijalnim tačkama.
Materijalna tačka- tijelo čije su dimenzije i oblik beznačajni u razmatranom kretanju (npr. u translatornom kretanju, kruto tijelo se može smatrati materijalnom tačkom)
sistem materijala pozvane tačke mnogo materijalne tačke u međusobnoj interakciji.
1 Newtonov zakon: bilo koja materijalna tačka održava stanje mirovanja ili ravnomernog pravolinijskog kretanja sve dok spoljašnji uticaji ne promene ovo stanje.
Njutnov 2. zakon: ubrzanje stečeno materijalnom tačkom u inercijski sistem referenca, direktno proporcionalna sili koja djeluje na tačku, obrnuto proporcionalna masi tačke i poklapa se u smjeru sa silom: a=F/m
Njutnov treći zakon: sile interakcije dviju materijalnih tačaka u inercijskom referentnom okviru jednake su po apsolutnoj vrijednosti i usmjerene u suprotnim smjerovima : Fik= - Fki
U statici, kao i u kinematici (br. 51), sistem materijalnih tačaka, koje su nepromenljivo međusobno povezane, naziva se kruto telo. Ovaj sistem je, dakle, apsolutno kruto tijelo čije tačke ostaju na konstantnoj udaljenosti jedna od druge, bez obzira na sile koje djeluju na te tačke i bez obzira na kretanje tijela.
Ovako definirano tijelo je, naravno, idealizacija. Prije svega, fizika nas uči da se čvrsta tijela sastoje od molekula, koje same po sebi imaju vrlo složenu strukturu i mogu biti u širokom spektru skrivenih kretanja. Radi se o molekulima zauzetim u svojim srednjim pozicijama za koje se može reći da ostaju u velikoj mjeri aproksimacije na istom
iste udaljenosti jedna od druge. Stoga molekule u njihovim srednjim pozicijama ovdje možemo gledati samo kao materijalne tačke. Ali to nije sve; čak i ako zanemarimo skrivena molekularna kretanja i obratimo pažnju samo na vidljiva kretanja čestica, onda i tada sva prirodna tijela mijenjaju svoj oblik pod djelovanjem sila koje se na njih primjenjuju; unutrašnje sile koje djeluju između čestica istog tijela zavise, kao što znamo (br. 109), od ovih deformacija. Međutim, budući da su deformacije tijela koje se u fizici nazivaju "čvrstim" vrlo male, one se mogu zanemariti u prvoj aproksimaciji, osim ako sile primijenjene na tijela nisu prevelike i ako ne proučavamo unutrašnje sile. Određivanje unutrašnjih sila i prividnih deformacija koje se javljaju u čvrstim tijelima je težak zadatak, koji se više ne odnosi na statiku, već na teoriju elastičnosti. Teorija koju ćemo izložiti je primenljiva na čvrsta tela sa većom tačnošću. fizička tijelašto se više približavaju savršeno krutom tijelu.
Sa logičke tačke gledišta, geometrijsku statiku krutog tijela treba posmatrati kao teorija granica. Ona je krenula poznati broj opći zakoni primjenjivi na sve čvrste tvari, bez obzira na njihovu molekularnu strukturu i njihova elastična svojstva, samo ako se deformacije mogu smatrati beskonačno malim. Međutim, ovako konstruisana teorija je nepotpuna teorija ravnoteže, jer sistematski ostavlja po strani elastična svojstva, čije je uključivanje u nekim slučajevima apsolutno neophodno. U tim slučajevima, metode geometrijske statike su se pokazale nedovoljnim za rješavanje svih pitanja koja problem ravnoteže može postaviti pred nas. Neka od ovih pitanja mogu se čak pokazati i kontradiktornima, ako se zadrži hipoteza o apsolutnoj nepromjenjivosti krutog tijela.
Jedan uslov nedeformabilnosti nije dovoljan da potkrijepi teoriju ravnoteže čvrstih tijela;
Ovome se mora dodati, kao dopuna definiciji krutog tijela, sljedeći mehanički postulat:
Postulat. - Ne menjajući ništa u uslovima ravnoteže krutog tela, može se dodati ili oduzeti dve jednake i direktno suprotne sile primenjene na dve njegove tačke.
Ovaj postulat bi mogao biti izveden iz opšteg principa poznatog kao princip virtuelnih pomeranja, ali to za sada nećemo činiti. Navedeni princip ćemo uspostaviti u jednom od sljedećih poglavlja kao temelj analitičke statike. Također bi bilo beskorisno uvoditi ovaj postulat ako prihvatimo osnovne zakone dinamike u obliku u kojem smo ih predstavili u prethodnom dijelu predmeta, budući da je postulat koji se razmatra, kao što ćemo kasnije vidjeti, jednostavan poseban slučaj jedan opšta teorema dinamika krutog tijela. Ako to uvedemo ovdje, činimo to kako bismo očuvali karakter nezavisne discipline iza statičnosti. Na ovaj postulat gledaćemo, sa stanovišta fizike, kao na direktnu posledicu iskustva; sa iste tačke gledišta teorijska mehanika smatrat ćemo ga dodatkom definiciji čvrstog tijela usvojenoj u statici, s tim što ćemo dobiti prednost da smo oslobođeni uvođenja molekularne hipoteze.
Kao što je već napomenuto u teoriji vektora (§ 28), ovaj osnovni postulat kao posljedicu podrazumijeva sljedeću tvrdnju:
Bez narušavanja uslova ravnoteže krutog tela, može se preneti tačka primene sile na proizvoljnu tačku na njegovoj liniji delovanja, pod uslovom da je ta nova tačka povezana sa telom.
Podrazumijeva se da ova rečenica govori samo o stanju ravnoteže tijela, a ne o radnjama koje različite tačke tijela vrše jedna na drugu, jer će se ta unutrašnja djelovanja, naravno, promijeniti kada se tačka primjene naznačena sila se menja.
operacija se može, na primjer, izvesti kada se na neke oslonce postavi kruto tijelo, ali se ni u kom slučaju ne može tvrditi da prijenos sile u ovom slučaju neće promijeniti reakcije oslonaca. Stoga bi bila velika greška primijeniti princip prijenosa sile u određivanju reakcija oslonaca, prenoseći, na primjer, jednu ili drugu primijenjenu silu na uporište. Jedini uslovi koji se legitimno mogu primeniti u ovom slučaju su uslovi opšte ravnoteže, pošto su potonji uvek neophodni uslovi.
185. Smanjenje sila primijenjenih na kruto tijelo (statička tačka gledišta).
Upravo smo vidjeli da je moguće, bez narušavanja ravnoteže krutog tijela, izvršiti sljedeće operacije nad silama primijenjenim na tačke tijela:
1°. Zbrajanje ili proširenje sila koje se primjenjuju u jednoj tački.
2°. Sabiranje ili oduzimanje dvije jednake i direktno suprotne sile.
3°. Prijenos sile na proizvoljnu tačku na njenoj liniji djelovanja.
Ove operacije, kao što je ustanovljeno u teoriji vektora (Seek. 29), su upravo one elementarne operacije koje omogućavaju da se dva ekvivalentna sistema vektora dovedu jedan do drugog. Iz ovoga dobijamo sledeću teoremu:
Bez narušavanja ravnoteže krutog tijela, moguće je zamijeniti bilo koji sistem sila primijenjenih na tijelo drugim sistemom sila, koji je sistem vektora ekvivalentan prvom.
Ovakva dva sistema sila nazivaju se ekvivalentnim.
Problem redukcije sistema sila primenjenih na kruto telo se tako poklapa sa problemom redukcije sistema vektora, tako da možemo doneti sledeće zaključke:
1°. Svođenje na dvije sile. Sistem sila primijenjenih na kruto tijelo može se smanjiti,
neravnoteža, samo na dvije sile, od kojih se jedna primjenjuje na proizvoljno odabranu tačku tijela (br. 26).
2°. Smanjenje na snagu i na par. Sistem sila primijenjenih na kruto tijelo može se svesti, bez narušavanja ravnoteže, na jednu silu primijenjenu u proizvoljnoj tački O tijela i na jedan par. Sila je rezultanta R svih sila sistema prenesenih u tačku O ( glavni vektor), a moment para jednak je glavnom momentu O sistema sila u odnosu na istu tačku (n°24).
Da bi se sistem sila sveo na jednu rezultantu R, potrebno je i dovoljno da, za proizvoljno uzeto središte redukcije O, geometrijski zbir R bude različit od nule, a rezultujući moment G (ako nije jednaka nuli) je okomita na R. Rezultanta je u ovom slučaju usmjerena duž centralne ose sistema.
Da bi se sistem sveo na jedan par, potrebno je i dovoljno da glavni vektor R bude jednak nuli, a glavni moment O različit od nule. U ovom slučaju, glavni moment sistema je isti za svaku tačku u prostoru.
Konačno, ako su vektori R i G oba nula, onda je sistem ekvivalentan nuli, a tijelo će biti u ravnoteži. Ovaj slučaj ćemo razmotriti u sljedećem odjeljku.
Sile u avionu. - Kada sve sile djeluju u istoj ravni, a njihov geometrijski zbir R nije jednak nuli, rezultirajući moment G (kao i moment svake sile) je okomit na R. Stoga se ove sile svode na jednu rezultantu R primijenjen u tački centralne ose (koja leži, očigledno, u ravni djelovanja sila). Ako je R jednako nuli, onda se sistem svodi na jedan par, a ako je, osim toga, G jednako nuli, onda je sistem u ravnoteži.
Korisno je napomenuti da se svaki ravni sistem sila uvijek može svesti na dvije sile, pril. u dvije date tačke A i ravni,
Zaista, svaka sila t primijenjena u tački O, koja leži izvan prave AB, razlaže se, duž pravca OA i OB, na dvije komponente koje se mogu prenijeti na tačke A i B. Ako je tačka O primjene sila leži na AB, a prava kroz koju sila prolazi kroz A, tada se tačka primjene sile može prenijeti ako linija djelovanja sile ne prolazi kroz A, tada tačka primjene sile može prenijeti duž linije djelovanja izvan prave linije AB, koja vodi do prvog slučaja.
paralelne sile. - Ako su sile paralelne, a njihov geometrijski zbir R nije jednak nuli, tada je rezultirajući moment G okomit na R, pa se te sile svode na jednu rezultujuću R primijenjenu u tački centralne ose (paralelno na opšti pravac snaga). Ako je R jednako nuli, onda se sistem svodi na jedan par ili je u ravnoteži (kada je moment para jednak nuli).
186. Ravnoteža krutog tijela.
Za ravnotežu slobodnog krutog tijela potrebno je i dovoljno da sistem sila koje se na njega primjenjuju (tj. u ovom slučaju vanjske sile) bude jednak nuli.
Već znamo da je ovaj uslov neophodan, jer je to opšti uslov ravnoteže.
Za kruto tijelo to se također ispostavlja dovoljnim. Zaista, ako je sistem sila ekvivalentan nuli, on se elementarnim operacijama može svesti na nulu i stoga se jednostavno mogu odbaciti sve sile koje ga čine. Na osnovu ovoga imamo dva uslova ravnoteže u vektorskom obliku
Ovi uslovi se rastavljaju na šest algebarskih jednačina. Neka su X, Y, Z projekcije vektora R na tri pravokutne koordinatne ose, ili zbir projekcija svih sila na istu os; neka dalje L, M,
Rezultirajući momenti sistema ovih sila oko istih osa; tada će ovih šest jednačina biti:
Često se kaže da su prve tri jednačine (ekvivalentne R = 0) uslovi ravnoteže za kretanje napred, a posljednja tri (ekvivalentne jednakosti G = 0) su uvjeti ravnoteže za rotaciju. Osnovu za ovakva imena dobićemo kasnije, kada primenimo princip virtuelnog rada na rešenje istog problema.
187. Smanjenje sila primijenjenih na kruto tijelo (dinamičko gledište). dinamička ravnoteža.
U dinamici krutog tijela pokazat ćemo da će u slučaju slobodnog krutog tijela njegovo gibanje biti potpuno određeno ako za svaki trenutak vremena glavni vektor i glavni moment u odnosu na neku tačku svih sila primijenjenih na njega su dati. Stoga imamo sljedeću teoremu:
Ako su dva sistema sila koja se primjenjuju na kruto tijelo stalno međusobno ekvivalentna sa stanovišta teorije vektora, tada će biti ekvivalentni sa stanovišta kretanja tijela.
Ova teorema je suštinski povezana sa dinamikom, ali je takođe usko povezana sa njom geometrijska statika. Zaista, to se može dokazati vrlo jednostavnom generalizacijom osnovnog postulata, koji precizira definiciju krutog tijela u statici (br. 184).
Zaista, ovaj postulat zamjenjujemo sljedećim:
Ne mijenjajući ništa u stanju mirovanja ili kretanja krutog tijela, može se dodati ili oduzeti dvije jednake i direktno suprotne sile primijenjene na dvije točke tijela.
Ovaj opštiji postulat, koji se takođe može potvrditi direktno iskustvom, omogućava nam da damo sledeće
ista generalizacija koncepta redukcije i ekvivalencije sila. Zaista, u svim rečenicama § 185, riječi "bez narušavanja ravnoteže" mogu se zamijeniti riječima "bez promjene bilo čega u stanju mirovanja ili kretanja tijela." Tada se ispostavlja da je zaključak br. 185 ekvivalentan ovdje navedenom dinamičkom principu.
Konkretno, primjećujemo jedan zaključak:
Ako kruto tijelo pod djelovanjem sistema sila S ostane u ravnoteži, onda ovaj sistem sila (koji je ekvivalentan nuli) ne može ništa promijeniti čak ni u stanju kretanja tijela, ako potonje više ne miruje.
Sada je sasvim prirodno ustanoviti sljedeću definiciju:
Dati sistem sila je u ravnoteži sa stanovišta dinamike, ili u dinamičkoj ravnoteži ako sile ne mogu promijeniti stanje mirovanja ili kretanja krutog tijela na koje su primijenjene.
Sa ovom definicijom možemo dati sljedeću tvrdnju:
Da bi sile koje se primenjuju na kruto telo bile u dinamičkoj ravnoteži, neophodno je i dovoljno da one predstavljaju sistem vektora ekvivalentnih nuli.
Ovakav način predstavljanja ravnoteže sila koje se primjenjuju na kruto tijelo vrlo je rasprostranjen, pa se riječ "ravnoteža" vrlo često koristi u tom smislu. Međutim, ne treba izgubiti iz vida da se takva ideja ravnoteže više odnosi na dinamiku nego na statiku.
188. Težište krutog tijela.
Smanjenje sila koje se primjenjuju na kruto tijelo može se posebno izvesti za sile težine svih materijalnih tačaka od kojih se tijelo sastoji. Svi ovi gutljaji su paralelne sile, jednako orijentisan. Ovaj sistem vektora se stoga svodi na jednu rezultantu jednaku ukupnoj težini P krutog tijela i primjenjuje na centar ovih paralelnih vektora, koji
označićemo G. Ova tačka, čiji položaj u telu ne zavisi od njegove orijentacije u odnosu na površinu Zemlje, je centar gravitacije tela. Vidjet ćemo u sljedećem poglavlju kako možemo odrediti njegove koordinate. Iz prethodnih teorema proizilazi da se djelovanje gravitacije na različite točke krutog tijela, kako sa statičke tako i sa dinamičke tačke gledišta, svodi na jednu silu, na ukupnu težinu primijenjenu na težište tijela.
Da li ste znali, U čemu je laž koncepta "fizičkog vakuuma"?
fizički vakuum - koncept relativističkog kvantna fizika, on se tamo shvata kao najniže (prizemno) energetsko stanje kvantizovanog polja, koje ima nulti impuls, ugaoni moment i drugo kvantni brojevi. Relativistički teoretičari fizički vakuum nazivaju prostorom potpuno lišenim materije, ispunjenim nemjerljivim, pa stoga samo imaginarnim poljem. Takvo stanje, prema relativistima, nije apsolutna praznina, već prostor ispunjen nekim fantomskim (virtuelnim) česticama. Relativistički kvantna teorija field tvrdi da se, u skladu sa Hajzenbergovim principom nesigurnosti, virtuelne čestice neprestano rađaju i nestaju u fizičkom vakuumu, odnosno prividne (kome se čine?), čestice: javljaju se takozvane oscilacije polja nulte tačke. Virtuelne čestice fizičkog vakuuma, a samim tim i same, po definiciji, nemaju referentni okvir, jer bi u suprotnom bio narušen Ajnštajnov princip relativnosti, na kome se zasniva teorija relativnosti (tj. apsolutno merenje sistem sa referencom od čestica fizičkog vakuuma bi postao moguć, što bi, zauzvrat, nedvosmisleno opovrglo princip relativnosti, na kojem je izgrađen SRT). Dakle, fizički vakuum i njegove čestice nisu elementi fizičkog svijeta, već samo elementi teorije relativnosti koji ne postoje u stvarnom svijetu, već samo u relativističkim formulama, kršeći princip kauzalnosti (oni nastaju i nestaju bez razum), princip objektivnosti (virtuelne čestice se mogu smatrati, zavisno od želje teoretičara, bilo postojeće ili nepostojeće), princip stvarne mjerljivosti (neuočljive, nemaju svoj ISO).
Kada jedan ili drugi fizičar koristi koncept "fizičkog vakuuma", on ili ne razumije apsurdnost ovog pojma, ili je lukav, budući da je skriven ili očigledan pristaša relativističke ideologije.
Najlakše je razumjeti apsurdnost ovog koncepta pozivajući se na porijeklo njegovog nastanka. Rodio ga je Paul Dirac 1930-ih, kada je postalo jasno da negacija etra u njegovom čistom obliku, kao što je to učinio veliki matematičar, ali osrednji fizičar, više nije moguća. Previše činjenica je u suprotnosti sa ovim.
Da bi odbranio relativizam, Paul Dirac je uveo afizički i nelogični koncept negativne energije, a zatim postojanje "mora" dvije energije koje se međusobno kompenziraju u vakuumu - pozitivne i negativne, kao i "more" čestica koje kompenziraju jedna drugu. - virtuelni (tj. prividni) elektroni i pozitroni u vakuumu.





