I.2.1 Prvi Newtonov zakon. inercijski referentni sistemi
Tijelo (materijalna tačka) , koji nije podložan vanjskim utjecajima, ili miruje ili se kreće pravolinijski i jednoliko. Takvo tijelo se zove besplatno. Kretanje takvog tijela naziva se slobodno kretanje ili inercija.
Postoji referentni okvir u kojem se sva slobodna tijela kreću pravolinijski i jednoliko
Postoje takvi referentni okviri, koji se nazivaju inercijski, u odnosu na koje materijalna tačka, u odsustvu vanjskih utjecaja, zadržava veličinu i smjer svoje brzine na neograničeno vrijeme
Takvi sistemi se nazivaju inercijski referentni sistemi - Prvi Newtonov zakon.
Njutnov drugi zakon
Svako tijelo se opire kada ga pokušava pokrenuti, tj. daj mu malo brzine. Ovo svojstvo tijela naziva se inercija. Mjera inercije - težina.
Sistem tijela koji nije pod utjecajem drugih tijela naziva se zatvoreni sistem ili izolovani sistem. U takvim sistemima tela mogu samo da komuniciraju jedno sa drugim zatvoreni sistem sastoji se od dva tijela (dvije materijalne tačke). Brzina tijela i , i prirast ovih brzina za isti vremenski period. Vektori i imaju suprotne smjerove i povezani su relacijom ![]() . Koeficijenti i su konstantni i imaju identični znaci i nazivaju se masama ili inercijskim masama tijela 1 i 2.
. Koeficijenti i su konstantni i imaju identični znaci i nazivaju se masama ili inercijskim masama tijela 1 i 2.
Puls ili količina kretanja materijalne tačke- vektor jednak proizvodu mase tačke i njene brzine.
Sistemski momentum - vektorska suma impulsi pojedinih materijalnih tačaka koje čine sistem: ![]() za sistem koji se sastoji od materijalnih tačaka.
za sistem koji se sastoji od materijalnih tačaka.
Puls izolovani sistem ostaje konstantan tokom vremena Zakon održanja impulsa.
Snaga (u mehanici)- bilo koji razlog koji mijenja zamah tijela (ovo je kvalitativna karakteristika). Kvantitativna karakteristika je izražena jednačinom:
![]()
Ova jednadžba vrijedi samo ako m ne zavisi od brzine.
U inercijskom referentnom okviru, derivacija količine gibanja materijalne tačke u odnosu na vrijeme jednaka je sili koja djeluje na nju.
U inercijskom referentnom okviru, ubrzanje koje prima materijalna tačka je direktno proporcionalno rezultanti svih sila koje se na nju primenjuju i obrnuto proporcionalno njenoj masi
Gore navedene izjave nisu ništa drugo do dvije formulacije Njutnov drugi zakon. Jednačina koja odgovara definiciji zakona je jednačina kretanja materijalne tačke.
Njutnov treći zakon
Sile interakcije dviju materijalnih tačaka su jednake po veličini, suprotno usmjerene i djeluju duž prave linije koja spaja ove materijalne tačke.
Za svaku akciju postoji jednaka i suprotna reakcija.
Materijalne tačke deluju jedna na drugu u parovima sa silama iste prirode, usmerenim duž prave linije koja spaja ove tačke, jednake po apsolutnoj vrednosti i suprotnog smera: . Ili, ako se sistem sastoji od skupa materijalnih tačaka, onda , tj. materijalne tačke međusobno deluju u parovima. Obje sile su usmjerene duž prave linije koja spaja ove tačke.
Ova tri izraza su različite formulacije Njutnov treći zakon.
Svaki sistem koji se kreće ubrzanjem u odnosu na inercijski referentni sistem je neinercijalni.
I.2.1 PRVI NJUTNOV ZAKON. INERCIJALNI REFERENTNI SISTEMI.
Prvi Newtonov zakon: svako tijelo zadržava stanje mirovanja ili ravnomjernog pravolinijskog kretanja sve dok ga vanjski utjecaj ne prisili da promijeni ovo stanje.
Prvi Newtonov zakon kaže da stanje mirovanja ili ravnomjernog pravolinijskog kretanja ne zahtijeva nikakve vanjske utjecaje da bi se održalo. Ovo manifestuje posebno dinamičko svojstvo tela, tzv inercija . Prema tome, prvi Newtonov zakon se također naziva zakon inercije , a kretanje tijela oslobođeno vanjskih utjecaja je inercija .
U gornjoj formulaciji prvog Newtonovog zakona podrazumijeva se da tijelo nije deformisano, tj. apsolutno solidan, te da u odsustvu vanjskih utjecaja ide naprijed. Osim toga, kruto tijelo se također može ravnomjerno rotirati po inerciji. Ako u prvom Newtonovom zakonu ne govorimo o "telu", već o materijalnoj tački, koja se po samoj definiciji ne može deformisati ili rotirati, onda nestaje potreba za svim tim rezervama. Uzimajući u obzir sve navedeno, možemo dati sljedeću formulaciju ovog zakona: postoje takvi referentni okviri, koji se nazivaju inercijski, u odnosu na koje materijalna tačka, u odsustvu vanjskih utjecaja, zadržava veličinu i smjer svoje brzine neograničeno. Zakon važi iu situaciji kada su spoljašnji uticaji prisutni, ali međusobno kompenzovani (ovo proizilazi iz 2. Newtonovog zakona, pošto kompenzovane sile daju telu nulto ukupno ubrzanje).
Činjenica da tijelo miruje (tj. održava brzinu jednaku nuli) sve dok na njega ne djeluje drugo tijelo sasvim je razumljiva i potvrđuju se svakodnevnim zapažanjima. Sam kamen se neće pomeriti sve dok ga neko ili nešto ne pomeri. Ali teško nam je povjerovati da tijelo može zauvijek održavati jednolično i pravolinijsko kretanje. Bačeni kamen doživljava otpor zraka i privlačnost prema zemlji. Da nema takvih uticaja, telo bi zadržalo stanje ravnomernog i pravolinijskog kretanja (tj. zadržalo bi veličinu i smer svoje brzine). Ili drugi primjer, nakon što je dotrčala, osoba ne može trenutno stati ili se momentalno okrenuti u stranu. Da bi u trčanju zaobišla motku, osoba je instinktivno hvata rukom, tj. pribegava uticaju drugog tela (stuba) da promeni smer svoje brzine.
I.2.2 SNAGE
Na silu zove vektor fizička količina, što je mjera uticaja drugih tijela ili polja na materijalnu tačku ili tijelo.
Poseban oblik materije koji povezuje čestice materije u jedinstvene sisteme i prenosi dejstvo jednih čestica na druge konačnom brzinom naziva se fizičko polje.
Polje koje djeluje silom na materijalnu tačku naziva se stacionarno polje, ako se ne mijenja tokom vremena, tj. ako u bilo kojoj tački na terenu
Interakcija između udaljenih tijela odvija se pomoću gravitacijskih i elektromagnetnih polja.
Gravitaciona interakcija- nastaje između tijela u skladu sa zakonom univerzalne gravitacije.
Elektromagnetna interakcija - javlja se između tijela ili čestica koje imaju električni naboj.
Osim toga, postoje i jaka interakcija, koji postoji, na primjer, između čestica koje čine jezgra atoma i slaba interakcija karakterizirajući, na primjer, procese transformacije nekih elementarnih čestica.
Problemi mehanike uzeti u obzir gravitacionih sila (gravitaciona sila) i dvije vrste elektromagnetnih sila - elastične sile i sile trenja.
Zovu se sile interakcije između dijelova nekog razmatranog sistema tijela unutrašnje sile.
Zovu se sile uticaja na tijela datog sistema od drugih tijela koja nisu uključena u ovaj sistem spoljne sile.
Agregat fizička tijela, u kojem interakcije sa vanjskim tijelima izostaju ili su kompenzirane, naziva se zatvoreno(izolovan) sistem.
Sila je potpuno definirana ako su dati njen modul, smjer i tačka primjene. Linija duž koje je sila usmjerena naziva se linija sile.
Istodobno djelovanje više sila ( , …, ) na materijalnu tačku je ekvivalentno djelovanju jedne sile, tzv. rezultantno ili rezultirajući sila i jednaka njihovoj geometrijskoj sumi:
Formula (I.48) je princip superpozicije sila.
VRSTE SILA U PRIRODI
Najjednostavniji tipovi sila su one koje nastaju zbog direktnih mehaničko djelovanje jednog tijela na drugo kada dođu u kontakt, to uključuje: vučne sile, trenje, pritisak, elastičnost, napetost.
Zaustavimo se samo na nekima od njih.
Sile elastičnosti. Sile koje proizlaze iz elastične deformacije tijela nazivaju se elastične sile . Ove sile djeluju između dodirnih slojeva deformabilnog tijela, kao i na mjestu kontakta između deformabilnog tijela i tijela koje uzrokuje deformaciju.

Na primjer, sa strane elastično deformirane ploče na šipku koja leži na njoj (slika 25) djeluje elastična sila. Elastične sile su sile elektromagnetne prirode.
Sila elastičnosti koja djeluje na tijelo razmatrano u ovom problemu sa strane oslonca ili ovjesa naziva se snaga reakcije podrške(suspenzija) ili sila zatezanja suspenzije. Na sl. 26 prikazani su primjeri primjene sila reakcije oslonca (sile) i sile zatezanja ovjesa (sile) na tijela.
Sila elastičnosti zavisi samo od promene rastojanja između delova datog elastičnog tela. Rad elastične sile ne ovisi o obliku putanje i jednak je nuli kada se kreće po zatvorenoj putanji. Dakle, elastične sile su potencijalne sile (koncept rada i potencijal sila biće razmotreni u ovom poglavlju I.3 (§ I.3.1, str. 41), (§ I.3.2, str. 45)).
Hookeov zakon: elastična sila je proporcionalna vektoru istezanja (kompresije) i suprotna njemu u pravcu:
![]() , (I.49)
, (I.49)
gdje - ukočenost tela- vrijednost određena elastičnom silom koja proizlazi iz jedne deformacije datog tijela;
Vektor elongacije je vrijednost koja karakterizira jednodimenzionalnu (linearnu) napetost (kompresiju).
Sile trenja. Svakim kretanjem jednog tijela na površini drugog nastaje otpor tom kretanju, koje mi zamišljamo sila trenja protiv ovog pokreta.
Razlikovati vanjsko i unutrašnje trenje. spoljašnje trenje naziva se mehanički otpor koji proizlazi iz relativnog kretanja dvaju dodirujućih tijela u ravnini njihovog kontakta. Na primjer, vanjsko trenje postoji između šipke i kosoj ravni na kojoj se šipka oslanja ili sa koje klizi. Pod određenim uvjetima, vanjsko trenje se pretvara u unutrašnjeg trenja, pri čemu nema skoka brzine u kontaktnoj zoni pri prelasku s jednog tijela na drugo.
Trenje između površina dva čvrsta tijela u dodiru u odsustvu tekućeg ili plinovitog sloja između njih naziva se suvo trenje. Trenje između površina čvrsto telo a okolna tečna ili gasovita sredina u kojoj se telo kreće naziva se tečnost ili viskozno trenje.
Suvo trenje se dijeli na:
§ statičko trenje– trenje u odsustvu relativnog pomeranja tela u kontaktu;
§ trenje klizanja- trenje pri relativnom kretanju dodirujućih tijela.
Sila trenja koja sprječava kretanje jednog tijela po površini drugog naziva se statička sila trenja.
Obično, kada se govori o sili statičkog trenja, oni misle krajnja sila statičkog trenja. Označiti sa vanjskom silom primijenjenom na tijelo u dodiru s drugim tijelom. Ova sila je paralelna sa ravninom kontakta. Relativno kretanje tijela se javlja pod uslovom ![]() . Statička sila trenja je uzrokovana zahvatanjem neravnih površina tijela, elastičnim deformacijama ovih nepravilnosti i prianjanjem (slijepljenjem) tijela na onim mjestima gdje su razmaci između njihovih čestica mali i dovoljni za nastanak međumolekularnog privlačenja. U tom smislu, sila statičkog trenja može se smatrati vrstom manifestacije elastičnih sila.
. Statička sila trenja je uzrokovana zahvatanjem neravnih površina tijela, elastičnim deformacijama ovih nepravilnosti i prianjanjem (slijepljenjem) tijela na onim mjestima gdje su razmaci između njihovih čestica mali i dovoljni za nastanak međumolekularnog privlačenja. U tom smislu, sila statičkog trenja može se smatrati vrstom manifestacije elastičnih sila.
Eksperimentalno je utvrđeno da maksimalna statička sila trenja () ne ovisi o kontaktnoj površini tijela i približno je proporcionalna modulu normalne sile pritiska (), pritiskajući površine za trljanje jedna na drugu: .
Faktor bez dimenzija naziva se koeficijent statičkog trenja. Zavisi od prirode i stanja površina koje se trljaju.
Trenje klizanja nastaje zbog hrapavosti površina za trljanje. Sile međumolekularne interakcije također igraju važnu ulogu.
Zakoni trenja klizanja.
I. Odnos sile trenja i sile pritiska (one. na silu koja pritišće jedna drugu trljajuću površinu) postoji konstantna vrijednost za ove površine.
Prvi zakon trenja može se formulirati na sljedeći način: sila trenja je direktno proporcionalna sili pritiska.
Eksperimentalno je pokazano da je sila trenja klizanja proporcionalna sili normalnog pritiska: ![]() .
.
II. Koeficijent trenja zavisi od materijala površina za trljanje.
III. Koeficijent trenja ne ovisi o veličini trljajućih površina. Ako je površina vrlo mala, tako da tijelo koje se kreće može ostaviti ogrebotinu na nepokretnom (na primjer, vrh nokta), onda ovaj zakon više ne vrijedi.
IV. Koeficijent trenja opada sa povećanjem brzine. To se objašnjava činjenicom da pri velikim brzinama nemaju sve izbočine grubih površina vremena da se prianjaju jedna uz drugu dovoljno duboko.
Na slici 27 prikazan je graf zavisnosti koeficijenta trenja od brzine kretanja.
 |
Iz grafikona se može vidjeti da najveći koeficijent trenja (dakle, najveća sila trenja) postoji u mirovanju. Ovo se ukratko izražava na sljedeći način: maksimalna vrijednost statičke sile trenja je veća od sile trenja klizanja. Zakone I, II i III pronašao je Coulomb iz eksperimenata sa tribometrom.
Bilješka: u najjednostavnijim slučajevima, sila trenja i normalna sila pritiska povezane su nejednakošću , koja postaje jednakost samo u prisustvu relativnog kretanja. Ovaj omjer se zove
Formulacija prvi zakon Newton , čija je eksperimentalna osnova stvorena eksperimentima, Galileja, davne 1636. godine, nekoliko puta se mijenjala, ali je njena suština ostala ista. Trenutno su u upotrebi dvije formulacije ovog zakona. Najčešće korišteni su sljedeći:
Postoje takvi referentni okviri u odnosu na koje tijelo koje se progresivno kreće održava konstantnom svoju brzinu ako na njega ne djeluju druga tijela ili se djelovanje drugih tijela kompenzira.
Prvi Newtonov zakon je drugačije formulisan.
Tijelo održava stanje mirovanja ili ravnomjernog pravolinijskog kretanja sve dok ne bude podvrgnuto nekompenziranom djelovanju drugih tijela ili fizičkih polja.
Fizičko značenje: 1) Zakon navodi šta će se desiti sa tijelom ako na njega ne utiču druga tijela ili se djelovanje drugih tijela nadoknadi. 2) Od svih referentnih okvira, Njutnov prvi zakon izdvaja one u kojima je ispunjen; takvi referentni okviri se nazivaju inercijalnim
Fenomen da tijelo koje nije podložno nekompenziranim vanjskim utjecajima održava svoju brzinu konstantnom (uključujući nulu ako tijelo miruje) naziva se inercija, a referentni okviri u odnosu na koje se takva tijela kreću konstantnom brzinom ili miruju su pozvani inercijalni. U tom smislu, prvi Newtonov zakon se često naziva zakonom inercije. Pravolinijsko ravnomjerno kretanje tijela u inercijskom referentnom okviru naziva se inercijalno kretanje. Koncept inercijalnog referentnog okvira je fundamentalan u fizici općenito, a posebno u mehanici.
Zakoni mehanike ne zavise od toga na koji inercijski referentni okvir se odnose. Drugim riječima, svi inercijski referentni okviri za bilo koju mehaničku pojavu su jednaki, tj. ne postoji poseban, "glavni" inercijski referentni okvir, kretanje u odnosu na koji bi se moglo smatrati "apsolutnim kretanjem".
8. Snaga. Njutnov drugi zakon.
Njutnov prvi zakon ukazuje da bi se promenila brzina tela u odnosu na inercijalni referentni sistem, tj. Za ubrzano kretanje tijela potrebno je da na ovo tijelo djeluje neko drugo tijelo. Takav uticaj se zove sila . Priroda sila može biti različita, ali za svaku silu su karakteristična dva osnovna svojstva.
1. Sila je fizička veličina, tj. može se okarakterisati ne samo s kvalitativne strane, što ga razlikuje od drugih fizičkih veličina, već se može izraziti i na određeni kvantitativan način. To potvrđuje i eksperimentalna činjenica da različite sile uzrokuju različita ubrzanja.
2. Sila je vektorska veličina. Kao rezultat djelovanja sile na tijelo, ono dobiva ubrzanje, što je vektorska veličina. Dakle, sila je i vektorska veličina: promjenom smjera sile mijenjamo smjer ubrzanja. Modul vektora sile određuje mjeru djelovanja drugih tijela na dato tijelo.
Na ovaj način, snagu - vektorska fizička veličina koja karakterizira djelovanje jednog tijela na drugo, koje, budući da je nekompenzirano, dovodi do promjene ubrzanja ovog tijela i mjera je takvog udara. U SI sistemu sila je 1 N. Silu karakterišu: tačka primene, modul, pravac.
Direktan kvantitativan odnos između sile koja djeluje na tijelo i ubrzanja ovog tijela uspostavlja se pomoću Njutnov drugi zakon :
Ubrzanje koje tijelo dobije pod djelovanjem sile je direktno proporcionalno ovoj sili, a njegov smjer se poklapa sa smjerom ove sile. Ili: Rezultanta svih sila koje djeluju na tijelo jednaka je proizvodu mase tijela i ubrzanja.
Fizičko značenje: 1) Zakon povezuje kinematičke i dinamičke karakteristike jedno tijelo; 2) Zakon kaže šta će se dogoditi sa tijelom ako na njega djeluju druga tijela ili polja 3) Jedinica za snagu je 1 Njutn
Dinamika je grana mehanike koja se bavi različite vrste mehanička kretanja, uzimajući u obzir međusobnu interakciju tijela. Osnove dinamike su Njutnova tri zakona, koji su rezultat generalizacije opservacija i eksperimenata u oblasti mehaničkih pojava koje su bile poznate i pre Njutna, a koje je sproveo sam Njutn. Newtonovi zakoni dinamike (inače nazvani klasičnom dinamikom) imaju ograničeno područje primjene. Oni vrijede za makroskopska tijela koja se kreću brzinama mnogo manjim od brzine svjetlosti u vakuumu. Fenomen inercije Napravimo zapažanja ponašanja različitih tijela u odnosu na Zemlju, birajući fiksni referentni okvir povezan sa površinom Zemlje. Naći ćemo da se brzina bilo kojeg tijela mijenja samo pod djelovanjem drugih tijela. Na primjer, neka tijelo stoji na stacionarnim kolicima. Gurnimo kolica - i tijelo će se prevrnuti protiv kretanja. Ako se, naprotiv, pokretna kolica s tijelom naglo zaustave, ona će se prevrnuti u smjeru kretanja. Očigledno, da nije bilo trenja između kolica i karoserije, onda se tijelo ne bi prevrnulo. U prvom slučaju bi se dogodilo sljedeće: pošto je brzina stojećeg tijela nula, a brzina kolica je počela da raste, kolica bi iskliznula naprijed ispod nepokretnog tijela. U drugom slučaju, prilikom kočenja kolica, tijelo koje stoji na njima zadržalo bi brzinu i klizilo bi naprijed sa zaustavljenih kolica.
Još jedan primjer. Metalna kugla se kotrlja niz nagnuti žlijeb na horizontalnu ravan sa iste visine h (slika 16), pa je njena brzina u tački u kojoj počinje horizontalno kretanje uvijek ista. Ostavite da se horizontalna površina prvo posipa pijeskom. Lopta će preći kratku udaljenost s1 i zaustaviti se. Zamijenite pješčanu površinu glatkom daskom. Lopta će putovati do zaustavljanja već mnogo veće udaljenosti s2. Zamijenite dasku ledom. Lopta će se kotrljati jako dugo i preći će razdaljinu s3 >> s2 dok se ne zaustavi. Ovaj slijed eksperimenata pokazuje da ako smanjimo utjecaj okruženje na tijelu koje se kreće, njegovo horizontalno kretanje u odnosu na Zemlju neograničeno se približava ravnomjernom i pravolinijskom. (Kada se tijelo kreće duž horizontalne površine, privlačnost ovog tijela od strane Zemlje kompenzira se elastičnošću oslonca - dasaka, leda, itd.) Činjenica da tijelo teži da ne održava bilo kakvo kretanje, odnosno pravolinijsko, je dokazano, na primjer, sljedećim eksperimentom (slika 17). Lopta koja se kreće pravolinijski duž ravne horizontalne površine, sudarajući se s preprekom krivolinijskog oblika, prisiljena je da se kreće u luku pod djelovanjem ove prepreke. Međutim, kada lopta dođe do ivice prepreke, prestaje da se kreće u krivolinijskom pravcu i ponovo počinje da se kreće pravolinijski. Sumirajući rezultate gornjih (i sličnih) zapažanja, možemo zaključiti da ako na dato tijelo ne djeluju druga tijela ili su njihova djelovanja međusobno kompenzirana, ovo tijelo miruje ili njegova brzina ostaje nepromijenjena u odnosu na referentni okvir fiksno povezan sa Zemljinom površinom. Pojava tijela koje održava stanje mirovanja ili pravolinijskog ravnomjernog kretanja u odsustvu ili nadoknadi vanjskih utjecaja na ovo tijelo naziva se inercija.
Zaključak o postojanju fenomena inercije prvi je donio Galileo, a potom i Newton. Ovaj zaključak je formuliran u obliku prvog Newtonovog zakona (zakon inercije): postoje takvi referentni okviri u odnosu na koje tijelo (materijalna tačka), u nedostatku vanjskih utjecaja na njega (ili uz njihovu međusobnu kompenzaciju) , održava stanje mirovanja ili ravnomjernog pravolinijskog kretanja. Referentni okviri u kojima je zadovoljen Njutnov prvi zakon nazivaju se inercijalni. Dakle, inercijski referentni sistemi su takvi referentni sistemi u odnosu na koje materijalna tačka, u odsustvu spoljašnjih uticaja na nju ili njihove međusobne kompenzacije, miruje ili se kreće ravnomerno i pravolinijski. 
Zapažanja pokazuju da se sa vrlo visokim stepenom tačnosti može smatrati inercijskim referentnim okvirom heliocentrični sistem, u kojem je porijeklo povezano sa Suncem, a osi su usmjerene prema određenim "fiksnim" zvijezdama. Referentni okviri koji su kruto povezani sa površinom Zemlje, strogo govoreći, nisu inercijski, jer se Zemlja kreće u orbiti oko Sunca i istovremeno rotira oko svoje ose. Međutim, kada se opisuju kretanja koja nemaju globalnu (tj. svjetsku) skalu, referentni sistemi povezani sa Zemljom mogu se smatrati inercijskim s dovoljnom tačnošću. Referentni okviri koji se kreću jednoliko i pravolinijski u odnosu na bilo koji inercijski referentni okvir su također inercijalni (vidi dolje). Galileo je ustanovio da je nemoguće odrediti da li ovaj sistem miruje ili se kreće ravnomjerno i pravolinijski pomoću bilo kakvih mehaničkih eksperimenata postavljenih unutar inercijalnog referentnog okvira. Ova izjava se zove Galilejev princip relativnosti ili mehanički princip relativnosti. Ovaj princip je kasnije razvio A. Einstein i jedan je od postulata specijalne teorije relativnosti. Inercijski sistemi reference igraju izuzetno važnu ulogu u fizici, budući da, prema Ajnštajnovom principu relativnosti, matematički izraz bilo kog zakona fizike ima isti oblik u svakom inercijalnom referentnom okviru. U budućnosti ćemo koristiti samo inercijalne sisteme (bez da to svaki put pominjemo). Referentni okviri u kojima prvi Newtonov zakon nije ispunjen nazivaju se neinercijalnim. Takvi sistemi uključuju bilo koji referentni okvir koji se kreće ubrzanjem u odnosu na inercijski referentni sistem.
Njutn je kao prvi zakon uzeo Galilejev princip inercije (1632) i dopunio ga konceptom inercijalnog referentnog okvira. Prema Galilejevom principu inercije slobodno telo zadržava stanje mirovanja ili ravnomernog, pravolinijskog kretanja sve dok ga uticaj drugih tela ne izvede iz ovog stanja.
Iz ovog principa slijedi da stanje mirovanja ili ravnomjernog pravolinijskog kretanja ne zahtijeva nikakve vanjske utjecaje da bi se održalo. Ovo manifestuje posebno dinamičko svojstvo tela, tzv inercija. Stoga se prvi Newtonov zakon naziva zakon inercije, a kretanje tijela u odsustvu utjecaja drugih tijela naziva se inerciono kretanje.
Prvi Newtonov zakon nije validan u svim referentnim okvirima. Sistemi na kojima radi se nazivaju inercijski referentni sistemi.
Eksperimentalno je utvrđeno da je praktično inercijski referentni okvir heliocentrični referentni sistem čije je ishodište u centru Sunca, a osi su povučene u pravcu tri udaljene zvijezde, odabrane npr. da su međusobno okomite.
U mnoge praktične svrhe, kada se makroskopska tijela kreću, sistem povezan sa Zemljom se koristi kao referentni sistem. Takav referentni okvir se smatra približno inercijskim zbog uticaja dnevne i godišnje rotacije Zemlje.
Dakle, možemo dati sljedeću formulaciju prvog Newtonovog zakona: postoje takvi referentni okviri u kojima tijelo održava stanje mirovanja ili ravnomjernog pravolinijskog kretanja sve dok ga utjecaj drugih tijela ne izvede iz tog stanja.
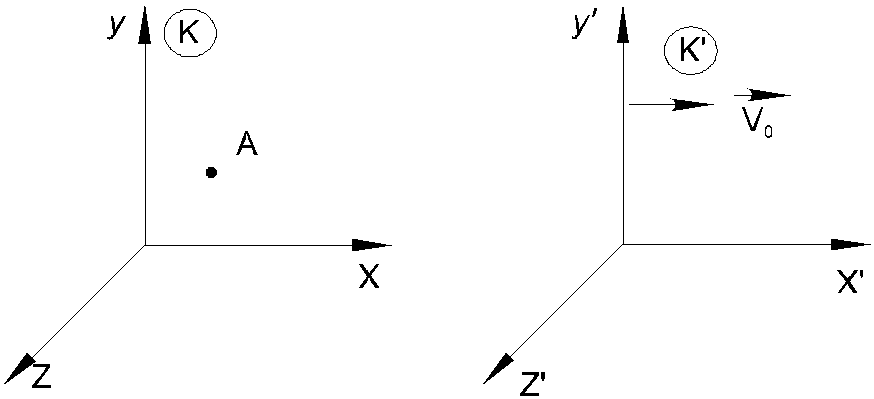
Pokažimo da je svaki referentni okvir koji se kreće jednoliko i pravolinijski u odnosu na inercijalni okvir također inercijalan. Neka tijelo A miruje u inercijskom referentnom okviru K (slika 3.1). Referentni okvir K "kreće se u odnosu na okvir K jednoliko i pravolinijski brzinom. Telo A u odnosu na okvir K" kreće se jednoliko i pravolinijsko brzinom -  , što također zadovoljava prvi Newtonov zakon. Dakle, referentni okvir K" je inercijalan. Dakle, prema poznatom jednom inercijskom referentnom okviru, moguće ih je konstruirati koliko god želite koristeći gore opisanu metodu.
, što također zadovoljava prvi Newtonov zakon. Dakle, referentni okvir K" je inercijalan. Dakle, prema poznatom jednom inercijskom referentnom okviru, moguće ih je konstruirati koliko god želite koristeći gore opisanu metodu.
3.1.2. Njutnov drugi zakon
Ovaj zakon je osnovni zakon dinamike materijalne tačke i krutog tijela koje se kreće naprijed.
Zakon uspostavlja odnos između sile, mase i ubrzanja.
Iskustvo pokazuje da je svaka promjena veličine ili smjera brzine nekog tijela uzrokovana njegovom interakcijom s drugim tijelima.
U mehanici se sila definira kao kvantitativna mjera interakcije tijela koja dovodi do promjene njihove brzine ili deformacije.
Silu karakterizira veličina, smjer i tačka primjene. shodno tome, sila je vektorska veličina.
Prema modernim idejama zasnovanim na iskustvu, sve interakcije uočene u prirodi mogu se svesti na četiri fundamentalne: gravitacionu, slabu, elektromagnetnu i jaku.
Gravitaciona interakcija svojstveno svim materijalnim objektima. Određuje se prisustvom mase u materijalnim tijelima i poštuje Newtonov zakon univerzalne gravitacije. Radijus djelovanja gravitacijske interakcije je neograničen. U oblasti mikrosvijeta uloga gravitacijske interakcije je zanemarljiva.
Slaba interakcija- kratkog dometa, postoji u mikrokosmosu i manifestuje se u tome što dovodi do određene vrste nestabilnosti elementarnih čestica.
Elektromagnetna interakcija manifestuje se u interakciji struja i naelektrisanja. Opseg elektromagnetne interakcije je neograničen. Odlučujuća je u formiranju atoma, molekula i makroskopskih tijela.
Nuklearna ili jaka interakcija je najintenzivnija. Radijus jake interakcije je vrlo mali ~10 -15 m. Zbog te interakcije, protoni i neutroni se zadržavaju u jezgrima, uprkos jakom odbijanju protona.
Neosnovne sile uključuju sile elastičnosti, trenja, otpora i druge. Sve ove sile mogu se svesti na elektromagnetne ili gravitacijske, međutim, to dovodi do značajne komplikacije rješavanja problema u mehanici. Zbog toga se u mehanici uz osnovne razmatraju sile elastičnosti i trenja.
Empirijski je ustanovljeno još jedno važno svojstvo sila koje se manifestuje u mehaničkoj interakciji. Sile u mehanici se pokoravaju princip superpozicije, što je kako slijedi: istovremena interakcija čestice M sa nekoliko drugihnčestice sa silama  ekvivalentno djelovanju jedne sile
ekvivalentno djelovanju jedne sile  jednak njihovoj vektorskoj sumi.
jednak njihovoj vektorskoj sumi.
 . (3.1)
. (3.1)
Snaga naziva se rezultanta.
Kao što iskustvo pokazuje, sva tijela imaju svojstvo sprječavanja promjene veličine i smjera brzine. Ovo svojstvo se zove inercija.
Masa se može definirati na dva načina. Prvi od njih je sljedeći. Odabire se referentno tijelo čija je masa m et se uzima kao jedinica mase. Masa m ispitivanog tijela određena je iz sljedećeg omjera, utvrđenog empirijski:
 ,
,
gdje a i a et - ubrzanja uzrokovana djelovanjem iste sile na referentno i ispitivano tijelo. Ovo definiše tzv inertna masa.
Drugi metod se zasniva na upotrebi zakona univerzalne gravitacije. Ovo definiše tzv gravitaciona masa.
A. Ajnštajn je formulisao princip ekvivalencije gravitacione i inercijalne mase: inercijalna i gravitaciona masa istog tela su iste.
Ekvivalencija inercijalnih i gravitacionih masa omogućava odabir jedne mjerne jedinice za njih. Kao jedinica mase u SI sistemu, usvojen je kilogram (kg) - masa referentnog platina-iridijumskog tela pohranjenog u Francuskoj u Međunarodnom birou za tegove i mere.
Dinamički utjecaj tijela koje se kreće na druga tijela ovisi o brzini i masi. Stoga, kao dinamičku karakteristiku intenziteta saobraćaja uvodimo vektorska količina  , koji se naziva impuls (ili impuls) tijela i jednak je proizvodu njegove mase i brzine:
, koji se naziva impuls (ili impuls) tijela i jednak je proizvodu njegove mase i brzine:
 .
(3.2)
.
(3.2)
Jedinica količine kretanja je kilogram-metar podijeljen sa sekundom (kg m/s).
Prema drugom Newtonovom zakonu, vremenski izvod impulsa tijela jednak je rezultanti svih sila koje su na njega primijenjene:
 . (3.3)
. (3.3)
Iz (3.3) slijedi da promjena momenta se događa u smjeru rezultujuće sile .
Primetimo da drugi Newtonov zakon u obliku (3.3) dozvoljava opis kretanja tela promenljive mase. Ako je masa tijela konstantna, onda iz (3.2) i (3.3) dobijamo jednačinu drugog Newtonovog zakona u obliku
 , (3.4)
, (3.4)
odakle, uzimajući u obzir formulu (2.21), dobijamo:
 . (3.5)
. (3.5)
SI jedinica sile je izvedena jedinica čija se definicija zasniva na formuli (3.5). Jedinica sile - 1 Njutn (N) je sila koja daje ubrzanje od 1 m tijelu mase 1 kg./ With 2 .
Njutnov drugi zakon se često naziva osnovnim zakonom dinamike translacionog kretanja. Uz pomoć ovog zakona u mehanici, dva glavna zadatka:
1. Direktan glavni zadatak -uspostavljanje diferencijalnih jednačina kretanja tijela (tačaka) i njihovo rješavanje.
2. Obrnuti glavni problem- utvrđivanje zavisnosti sila interakcije tela od njihovih koordinata, brzina i vremena, odnosno uspostavljanje zakona interakcije.





