Stanje statičke ravnoteže. Vrste balansa
Glavni znak interakcije tijela u dinamici je pojava ubrzanja. Međutim, često je potrebno znati pod kojim uvjetima se tijelo, na koje djeluje više različitih sila, ne kreće ubrzano. Hajde da se visimo
lopta na žici. Sila gravitacije djeluje na loptu, ali ne uzrokuje ubrzano kretanje prema Zemlji. To se sprječava djelovanjem elastične sile jednake po apsolutnoj vrijednosti i usmjerene u suprotnom smjeru. Sila gravitacije i sila elastičnosti se međusobno balansiraju, njihova rezultanta je nula, stoga je i ubrzanje lopte nula (slika 40).
Tačka kroz koju rezultanta gravitacije prolazi na bilo kojoj lokaciji tijela naziva se težište (slika 41).
Grana mehanike koja proučava uslove za ravnotežu sila naziva se statika.
Ravnoteža nerotirajućih tijela.
Uniform rectilinear kretanje napred tijelo ili njegovo mirovanje moguć je samo ako je geometrijski zbir svih sila primijenjenih na tijelo jednak nuli.
Nerotirajuće tijelo je u ravnoteži ako je geometrijski zbir sila primijenjenih na tijelo nula.
Ravnoteža tijela koja imaju os rotacije.
AT Svakodnevni život i tehnologije, često postoje tijela koja se ne mogu kretati naprijed, ali mogu rotirati oko ose. Primjeri takvih tijela su vrata i prozori, kotači automobila, ljuljačke itd. Ako vektor sile P leži na pravoj liniji koja siječe os rotacije, tada je ta sila uravnotežena elastičnom silom sa strane ose rotacije (Sl. 42).
Ako prava linija na kojoj leži vektor sile F ne siječe os rotacije, ta sila se ne može uravnotežiti


elastična sila sa strane ose rotacije, a telo rotira oko ose (sl. 43).
Rotacija tijela oko ose pod djelovanjem jedne sile može se zaustaviti djelovanjem druge sile.Iskustvo pokazuje da ako dvije sile zasebno uzrokuju rotaciju tijela u suprotnim smjerovima, onda kada djeluju istovremeno, tijelo je u ravnoteži ako je ispunjen sljedeći uslov:
gdje su najkraće udaljenosti od pravih linija na kojima leže vektori sila (linije djelovanja sila) do ose rotacije (slika 44). Udaljenost se naziva krak sile, a proizvod modula sile i kraka se naziva moment sile M:
Ako se momentima sila koje uzrokuju rotaciju tijela oko ose u smjeru kazaljke na satu dodijeli pozitivan predznak, a momentima sila koje uzrokuju rotaciju u smjeru suprotnom od kazaljke na satu - negativan predznak, tada se može formulirati uvjet ravnoteže za tijelo koje ima os rotacije kao pravilo momenata: tijelo koje ima fiksnu os rotacije je u ravnoteži ako je algebarski zbir momenata svih sila primijenjenih na tijelo oko ove ose jednak nuli:
SI jedinica momenta je moment sile od 1 N, čija je linija djelovanja udaljena od ose rotacije. Ova jedinica se zove njutn metar.
Opšti uslov za ravnotežu tela. Kombinirajući ova dva zaključka, možemo formulirati opći uvjet za ravnotežu tijela: tijelo je u ravnoteži ako je geometrijski zbir vektora svih sila primijenjenih na njega i algebarski zbir momenata tih sila oko ose rotacije su jednake nuli.
Kada je ispunjen uslov opšte ravnoteže, telo ne mora nužno da miruje. Prema drugom Newtonovom zakonu, kada je rezultanta svih sila jednaka nuli, ubrzanje tijela je jednako nuli i ono može mirovati ili? kreću se ravnomjerno i pravolinijski.
Jednakost algebarskog zbira momenata sila sa nulom također ne znači da u ovom slučaju tijelo nužno miruje. Nekoliko milijardi godina, rotacija Zemlje oko svoje ose nastavlja se sa konstantnim periodom upravo zato što je algebarski zbir momenata sila koje na Zemlju djeluju iz drugih tijela vrlo mali. Iz istog razloga, kotač bicikla koji se okreće nastavlja da se okreće konstantnom frekvencijom, a samo vanjske sile zaustavljaju ovu rotaciju.
Vrste balansa.
U praksi važnu ulogu igra ne samo ispunjenje uslova ravnoteže za tijela, već i kvalitativna karakteristika ravnoteže, koja se zove stabilnost. Postoje tri vrste ravnoteže tijela: stabilna, nestabilna i indiferentna.
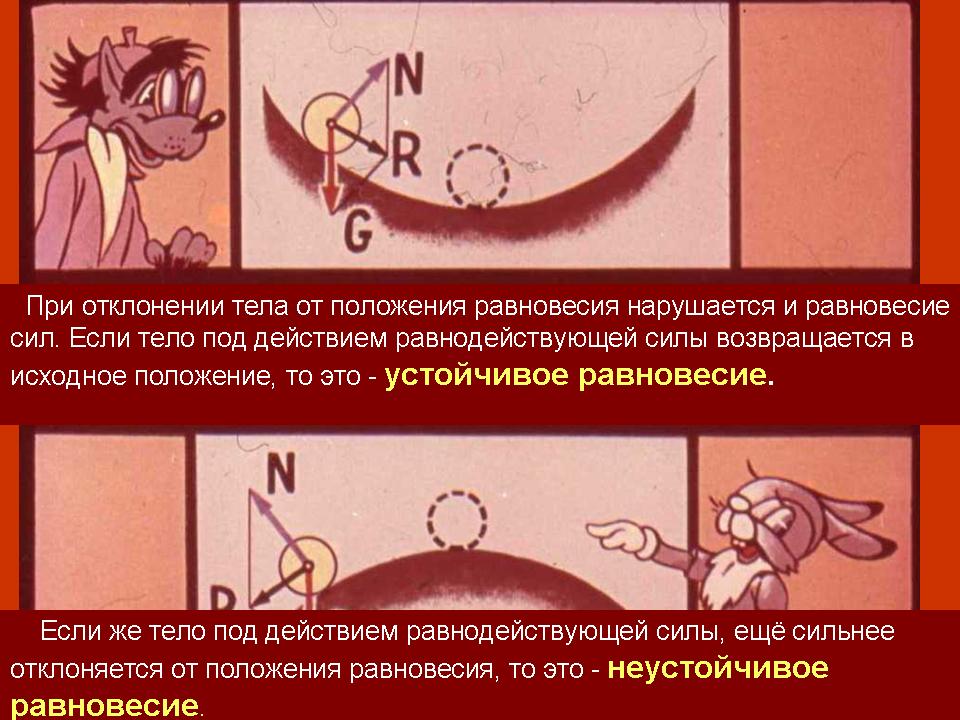
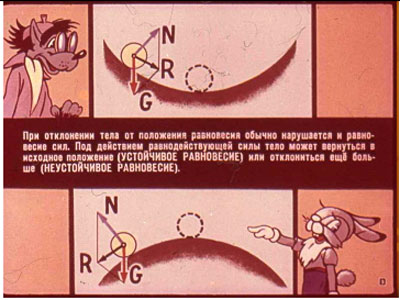
Ravnoteža se naziva stabilnom ako se tijelo nakon malih vanjskih utjecaja vrati u prvobitno stanje ravnoteže. To se događa ako, uz neznatno pomicanje tijela u bilo kojem smjeru od početnog položaja, rezultanta sila koje djeluju na tijelo postane različita od nule i bude usmjerena prema ravnotežnom položaju. U stabilnoj ravnoteži je, na primjer, lopta na dnu udubljenja (slika 45).
Ravnoteža se naziva nestabilnom ako je, uz blagi pomak tijela iz ravnotežnog položaja, rezultanta sila primijenjenih na njega različita od nule i usmjerena je iz ravnotežnog položaja (Sl. 46).
Ako za male pomake tijela iz prvobitnog položaja rezultanta sila primijenjenih na tijelo ostane jednaka nuli, tada je tijelo u stanju indiferentne ravnoteže. Lopta je u indiferentnoj ravnoteži na horizontalnoj površini (slika 47).


Tijelo s fiksnom osom rotacije je u stabilnoj ravnoteži ako mu se težište nalazi ispod ose rotacije i nalazi se na okomitoj liniji koja prolazi kroz os rotacije (Sl. 48, a).
Uz neznatno odstupanje od ovog ravnotežnog položaja, algebarski zbir momenata sila koje djeluju na tijelo postaje različit od nule i rezultirajući moment sila okreće tijelo u njegov prvobitni ravnotežni položaj (Sl. 48, b).
Ako je težište na okomitoj liniji koja prolazi kroz os rotacije, ali se nalazi iznad ose rotacije, tada je ravnoteža nestabilna (Sl. 49, a, b).

Tijelo je u indiferentnoj ravnoteži kada osa rotacije tijela prolazi kroz njegovo težište (slika 50).
Balans tijela na osloncu.
Ako okomita linija povučena kroz težište C tijela prelazi područje oslonca, tada je tijelo u ravnoteži (Sl. 51). Ako okomita linija povučena kroz centar gravitacije ne prelazi područje oslonca, tada se tijelo prevrće (Sl. 52).

















![]()





 Nazad napred
Nazad napred
Pažnja! Pregled slajda je samo u informativne svrhe i možda neće predstavljati puni obim prezentacije. Ako si zainteresovan ovo djelo preuzmite punu verziju.
Ciljevi lekcije: Proučiti stanje ravnoteže tijela, upoznati se sa razne vrste balans; saznati uslove pod kojima je tijelo u ravnoteži.
Ciljevi lekcije:
- Obuka: Proučiti dva uslova ravnoteže, vrste ravnoteže (stabilna, nestabilna, indiferentna). Saznajte pod kojim uslovima su tijela stabilnija.
- u razvoju: Promovirati razvoj kognitivnog interesa za fiziku. Razvoj vještina za upoređivanje, generalizaciju, isticanje glavne stvari, donošenje zaključaka.
- edukativni: Negovati pažnju, sposobnost izražavanja i odbrane svog gledišta, razvijati komunikacijske veštine učenika.
Vrsta lekcije: lekcija učenje novog gradiva uz kompjutersku podršku.
Oprema:
- Disk "Rad i snaga" iz "Elektronske lekcije i testovi.
- Tabela "Uslovi ravnoteže".
- Prizma nagnuta sa viskom.
- Geometrijska tijela: cilindar, kocka, konus, itd.
- Računar, multimedijalni projektor, interaktivna tabla ili ekran.
- Prezentacija.
Tokom nastave
Danas ćemo u lekciji naučiti zašto ždral ne pada, zašto se igračka Roly-Vstanka uvijek vraća u prvobitno stanje, zašto Krivi toranj u Pizi ne pada?
I. Ponavljanje i ažuriranje znanja.
- Formulirajte prvi Newtonov zakon. Kakav je status zakona?
- Na koje pitanje odgovara Njutnov drugi zakon? Formula i formulacija.
- Na koje pitanje odgovara Njutnov treći zakon? Formula i formulacija.
- Kolika je rezultujuća sila? Kako je ona?
- Sa diska "Kretanje i interakcija tijela" ispunite zadatak br. 9 "Rezultanta sila različitih smjerova" (pravilo sabiranja vektora (2, 3 vježbe)).
II. Učenje novog gradiva.
1. Šta se zove ravnoteža?
Ravnoteža je stanje mirovanja.
2. Uslovi ravnoteže.(slajd 2)
a) Kada tijelo miruje? Iz kog zakona ovo dolazi?
Prvi uslov ravnoteže: Tijelo je u ravnoteži ako je geometrijski zbir spoljne sile primijenjen na tijelo je nula. ∑ F = 0
b) Neka dva jednake sile, kao što je prikazano na slici.

Hoće li biti u ravnoteži? (Ne, ona će se okrenuti)
Samo centralna tačka miruje, dok se ostale kreću. To znači da je da bi tijelo bilo u ravnoteži, potrebno je da zbir svih sila koje djeluju na svaki element bude jednak 0.
Drugi uslov ravnoteže: Zbir momenata sila koje djeluju u smjeru kazaljke na satu mora biti jednak zbroju momenata sila koje djeluju u smjeru suprotnom od kazaljke na satu.
∑ M u smjeru kazaljke na satu = ∑ M suprotno od kazaljke na satu
Moment sile: M = F L
L - rame sile - najkraća udaljenost od tačke oslonca do linije djelovanja sile.
3. Težište tijela i njegova lokacija.(slajd 4)
Težište tijela je tačka kroz koju je rezultanta svega paralelne sile gravitacija koja djeluje na pojedine elemente tijela (u bilo kojem položaju tijela u prostoru).
Pronađite težište sljedećih figura:

4. Vrste ravnoteže.
a) (slajdovi 5-8)
zaključak: Ravnoteža je stabilna ako, uz malo odstupanje od ravnotežnog položaja, postoji sila koja teži da ga vrati u ovaj položaj.
Položaj u kojem je njegova potencijalna energija minimalna je stabilan. (slajd 9)
b) Stabilnost tijela koja se nalaze na uporištu ili na uporištu.(slajdovi 10-17)

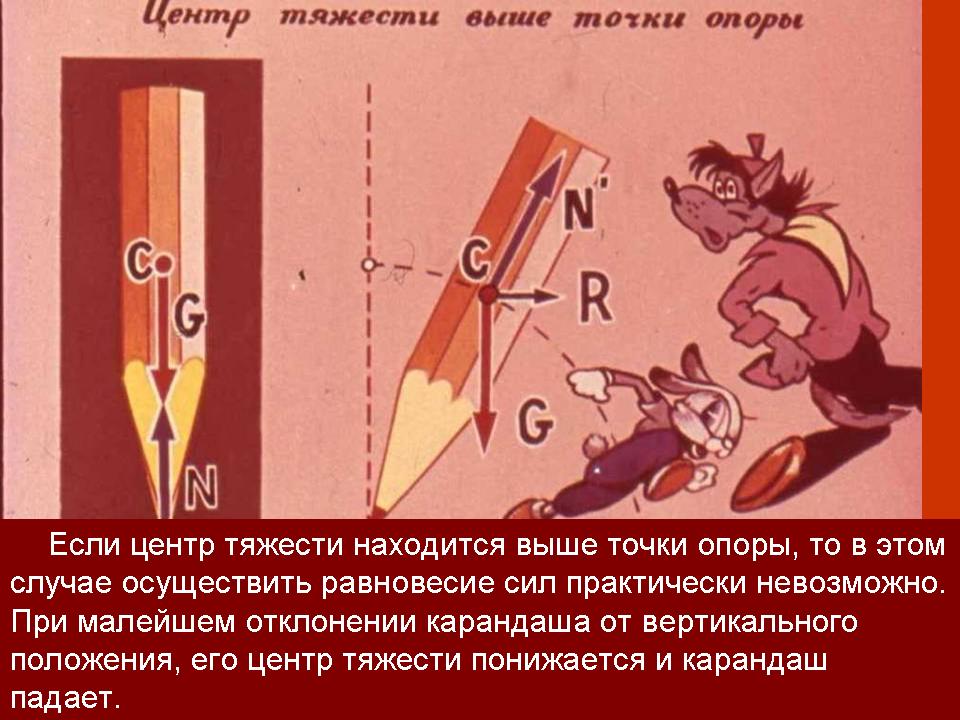
zaključak: Za stabilnost tijela koje se nalazi na jednoj tački ili liniji oslonca, potrebno je da težište bude ispod tačke (linije) oslonca.
c) Stabilnost tijela na ravnoj površini.
(slajd 18)
1) Potporna površina- ovo nije uvijek površina koja je u kontaktu sa tijelom (već ona koja je ograničena linijama koje spajaju noge stola, tronošca)

2) Analiza slajda iz "Elektronskih lekcija i testova", diska "Rad i snaga", lekcije "Vrste ravnoteže".
Slika 1.
- Po čemu se stolice razlikuju? (Kvadratna osnova)
- Koji je stabilniji? (sa većom površinom)
- Po čemu se stolice razlikuju? (Lokacija centra gravitacije)
- Koji je najstabilniji? (koji je centar gravitacije niži)
- Zašto? (Zato što se može skrenuti na veći ugao bez prevrtanja)
3) Iskustvo sa devijantnom prizmom
- Stavimo prizmu sa viskom na dasku i počnimo je postepeno podizati preko jedne ivice. šta vidimo?
- Sve dok linija viska prelazi površinu omeđenu osloncem, ravnoteža se održava. Ali čim vertikala koja prolazi kroz centar gravitacije počne izlaziti izvan granica potporne površine, polica za knjige se prevrće.
Parsing slajdovi 19–22.
![]()
Zaključci:
- Tijelo s najvećom površinom oslonca je stabilno.
- Od dva tijela iste površine, tijelo čije je težište niže je stabilno, jer može se skrenuti bez prevrtanja pod velikim uglom.
Parsing slajdovi 23–25.

Koji su brodovi najstabilniji? Zašto? (za koje se teret nalazi u skladištima, a ne na palubi)

Koji su automobili najstabilniji? Zašto? (Da bi se povećala stabilnost automobila na skretanjima, podloga se naginje u smjeru skretanja.)
Zaključci: Ravnoteža može biti stabilna, nestabilna, indiferentna. Stabilnost tijela je veća što je veća površina oslonca i što je niže težište.
III. Primena znanja o stabilnosti tela.
- Kojim specijalnostima je najpotrebnije znanje o ravnoteži tijela?
- Projektanti i konstruktori raznih objekata (visoke zgrade, mostovi, TV tornjevi itd.)
- Cirkuski umjetnici.
- Vozači i drugi profesionalci.
(slajdovi 28–30)
- Zašto se Roly-Vstanka vraća u ravnotežni položaj pri bilo kom nagibu igračke?
- Zašto je Krivi toranj u Pizi nagnut i ne pada?
- Kako biciklisti i motociklisti održavaju ravnotežu?
Lekcija za poneti:
- Postoje tri vrste ravnoteže: stabilna, nestabilna, indiferentna.
- Položaj tijela je stabilan, u kojem je njegova potencijalna energija minimalna.
- Stabilnost tijela na ravnoj površini veća je što je veća površina oslonca i što je niže težište.
Zadaća: § 54 – 56 (G.Ya. Myakishev, B.B. Bukhovtsev, N.N. Sotsky)
Korišteni izvori i literatura:
- G.Ya. Myakishev, B.B. Buhovcev, N.N. Socki. fizika. 10. razred.
- Filmska traka "Stabilnost" 1976 (skenirao sam na filmskom skeneru).
- Disk "Kretanje i interakcija tijela" iz "Elektronske lekcije i testovi".
- Disk "Rad i snaga" iz "Elektronske lekcije i testovi".
Vrsta bilansa čvrsto telo određena djelovanjem gravitacije u slučaju proizvoljno malog odstupanja: a) indiferentna ravnoteža - djelovanje gravitacije se ne mijenja; b) stabilan - uvek vraća telo u prethodni položaj (postoji trenutak stabilnosti); c) nestabilan - dejstvo gravitacije uvek izaziva prevrtanje tela (dolazi do momenta prevrtanja); d) ograničeno-stabilno - prije potencijalne barijere vraća se položaj tijela (dolazi do trenutka stabilnosti), nakon nje se tijelo prevrće (dolazi do momenta prevrtanja).
U mehanici krutih tijela postoje tri vrste ravnoteže : ravnodušan, stabilan i nestabilan. Ove vrste se razlikuju po ponašanju tijela, malo odstupajući od uravnoteženog položaja. Kada tijelo osobe u potpunosti zadrži pozu ("otvrdnjavanje"), na njega vrijede zakoni ravnoteže krutog tijela.
Ravnodušna ravnoteža Karakteristično je da se, uz bilo kakva odstupanja, održava ravnoteža. Lopta, cilindar, kružni konus na horizontalnoj ravni (donji oslonac) možete rotirati kako želite i oni će ostati u mirovanju. . Linija djelovanja gravitacije (G) u takvom tijelu (ili, kako kažu, linija gravitacije je kraća) uvijek prolazi kroz uporište, poklapa se s linijom djelovanja sile reakcije oslonca (R); balansiraju jedno drugo. U sportskoj tehnologiji, ravnodušna ravnoteža se praktički ne nalazi ni na kopnu ni u vodi.
održivu ravnotežu karakterizira povratak na prethodnu poziciju uz bilo kakvo odstupanje. On je stabilan sa proizvoljno malim odstupanjem iz dva razloga; a) težište tijela se diže više (Dh), stvara se rezerva potencijalna energija u polju gravitacije; b) linija gravitacije (G) ne prođe kroz oslonac, pojavljuje se krak gravitacije (d) i nastaje moment gravitacije (moment stabilnosti M usta = Gd), vraćanje tijela (sa smanjenjem potencijalne energije) u prethodni položaj. Takva ravnoteža se nalazi kod osobe sa gornjim osloncem. Na primjer, gimnastičarka u vješanju na prstenovima; ruka slobodno visi u ramenskom zglobu. Sama sila gravitacije vraća tijelo u prethodni položaj.
Nestabilna ravnoteža Karakteristično je da proizvoljno malo odstupanje uzrokuje još veće odstupanje i samo tijelo se ne može vratiti u prethodni položaj. Ovo je situacija sa donji oslonac kada tijelo ima tačku ili liniju (ivicu tijela) oslonca. Kada tijelo odstupi: a) centar gravitacije padne ispod (-Dh), potencijalna energija se smanjuje u gravitacionom polju Zemlje; b) linija gravitacije (G) sa devijacija tijela se udaljava od uporišta, rame se povećava (d) i moment gravitacije (moment prevrtanja M def. =Gd ); sve više odmiče telo od prethodnog položaja. Nestabilna ravnoteža u prirodi je praktično nemoguća.
Kod fizičkih vježbi se najčešće susreće druga vrsta ravnoteže kada se ispod nalazi potpora (donji oslonac) . Uz lagano odstupanje tijela, njegovo težište se podiže (+ Dh) i pojavljuje se trenutak stabilnosti (M usta =Gd). Postoje znaci stabilne ravnoteže; moment gravitacije tela će ga vratiti u prethodni položaj. Ali to se nastavlja samo kada se odstupi do određenih granica, sve dok linija gravitacije ne dođe do ruba područja oslonca. U ovom položaju već nastaju uslovi nestabilne ravnoteže: sa daljim odstupanjem telo se prevrće; pri najmanjem odstupanju u suprotnom smjeru, vraća se u prethodni položaj. Granica područja potpore odgovara vrhu "potencijalne barijere" (maksimalna potencijalna energija). U granicama između suprotnih barijera ("potencijalne rupe") u svim smjerovima, ograničeno-stabilna ravnoteža .
2.4. Stabilnost krutog tijela i tjelesnih sistema
Stabilnost objekta karakteriše njegova sposobnost, suprotstavljajući se neravnoteži, da zadrži položaj. Razlikujte statičke pokazatelje stabilnosti kao sposobnost oduprenja neravnoteži i dinamičke kao sposobnost vraćanja ravnoteže.
Pokazatelj statičke održivosti kruto tijelo služi (u ograničeno-stabilnoj ravnoteži) faktor stabilnosti . Na sl. 51, a moment prevrtanja stvara sila prevrtanja (F ODA) primijenjena na rame (h) u odnosu na liniju prevrtanja (O), oko koje se tijelo skreće. Moment stabilnosti u odnosu na istu liniju prevrtanja nastaje od početka primjene sile F def. Najveći postaje na početku prevrtanja (granični momenat stabilnosti), zatim krak gravitacije G opada i moment stabilnosti opada na nulu (u graničnom položaju - BCT iznad linije prevrtanja).
a- koeficijent stabilnosti tijela; b, c - ugao stabilnosti (a);d- statička i dinamička stabilnost sistema tijela; d - nosiva površina (isprekidana linija) i efektivna površina ležaja (zasjenjena) (original)
Koeficijent stabilnosti jednak je omjeru graničnog momenta stabilnosti i momenta prevrtanja. Kada je koeficijent stabilnosti tijela u mirovanju jednak ili veći od jedan, nema prevrtanja. Ako je manji od jedan, ravnoteža se ne može održati.
Međutim, otpor samo ova dva mehanička faktora (dva momenta sila) za tjelesni sistemi, ako može promijeniti konfiguraciju ne iscrpljuje stvarnu sliku. Pretpostavimo da rvač koji se opire (slika 51, d), savijajući noge, spušta težište svog tijela strogo okomito. Od toga se neće promijeniti ni sila gravitacije njegovog tijela, ni njegovog ramena, a samim tim i moment stabilnosti. Ali tačka primjene F onp će se smanjiti, rame ove sile će se smanjiti, njen moment će postati manji. Na taj način, hrvač može povećati faktor stabilnosti svog tijela smanjenjem momenta prevrtanja. Naginjanjem tijela unazad neće promijeniti moment prevrtanja, već će povećati rame gravitacije svog tijela i moment stabilnosti. Ovdje također pobjeđuje u statičkoj stabilnosti. Hrvač, napinjući mišiće i oslanjajući se na tepih, stvara drugu vanjsku horizontalnu silu (silu trenja) usmjerenu prema njemu, čime se smanjuje učinak potiska prevrtanja. Ovo posljednje također ovisi o spremnosti mišića rvača da se suprotstave njegovoj iznenadnoj primjeni. Prevarne radnje mogu drastično pogoršati njihovu spremnost i uzrokovati prevrtanje s malim potiskom. Najvažnija stvar za biomehanički sistem nije pasivna upotreba tjelesne gravitacije, već aktivna povlačenja mišića koja održavaju i mijenjaju držanje tijela. U tjelesnom sistemu svaka karika mora biti u ravnoteži, održavajući svoju konfiguraciju (držanje ljudskog tijela).
Posljedično, koeficijent stabilnosti tijela i fiksnog sistema tijela karakterizira statičku stabilnost kao sposobnost otpora neravnoteži. Kod ljudi, pri određivanju stabilnosti, uvijek se mora uzeti u obzir aktivno suprotstavljanje povlačenja mišića i spremnost na otpor.
Dinamički indikator stabilnostičvrsto tijelo služi ugao stabilnosti . Ovo je ugao formiran od strane gravitacione linije i prave linije koja povezuje centar gravitacije sa odgovarajućom ivicom područja oslonca. (vidi sliku 51, b, c). Počinjemo skretati tijelo sve dok linija gravitacije ne dostigne granicu područja oslonca (granični položaj tijela je vrh potencijalne barijere). Kod tela, postavljenog uspravno (sl. 51, b), osnova održivosti(/i) je manji od onog istog tijela koje leži ravno (/2) (vidi sliku 51, in). To znači da je linija gravitacije bliža granici iza koje će početi prevrtanje. Težište mora biti podignuto da bi se prevrnulo u prvom slučaju na nižu visinu (Dh 1) nego u drugom (Dh 2). Ugao stabilnosti u prvom slučaju (a 1) je jasno manji nego u drugom ( a 2).
fizičko značenje ugao stabilnosti je da je jednak kutu rotacije (<р), на который надо повернуть тело для начала его опрокидывания. Угол устойчивости показывает, в каких пределах еще восстанавливается равновесие. Он характеризует степень динамической устойчивости: если угол больше, то и устойчивость больше. Этот показатель удобен для сравнения степени устойчивости одного тела в разных направлениях (если площадь опоры не круг и линия силы тяжести не проходит через его центр).
Zbir dva ugla stabilnosti u jednoj ravni se smatra kao ravnotežni ugao u ovoj ravni. Karakterizira marginu stabilnosti u datoj ravnini, odnosno određuje raspon kretanja centra gravitacije do mogućeg prevrtanja u jednom ili drugom smjeru (na primjer, za slalomiste na skijanju, gimnastičara na vagi greda, rvač u stojećem stavu).
U slučaju ravnoteže biomehanički sistem Za primjenu dinamičkih pokazatelja stabilnosti potrebno je uzeti u obzir značajne dorade.
prvo, područje efikasne podrške osobe ne poklapa se uvijek s površinom oslonca. Kod osobe, kao i kod čvrstog tijela, površina oslonca je ograničena linijama koje povezuju krajnje tačke oslonca (ili vanjske ivice nekoliko potpornih područja) (vidi sliku 51, e). Ali kod ljudi se granica efektivnog područja potpore često nalazi unutar konture potpore, jer meka tkiva (bosonog stopala) ili slabe karike (krajnje falange prstiju u stojku na rukama na podu) ne mogu uravnotežiti opterećenje. Zbog toga se linija prevrtanja pomiče prema unutra od ivice potporne površine, površina efektivne potpore je manja od površine nosive površine.
Drugo, osoba nikada ne odstupa cijelim tijelom u odnosu na liniju prevrtanja (poput kocke), već se kreće u odnosu na osi bilo kojeg zgloba, bez potpunog održavanja držanja (na primjer, kada stoji - pokreti u skočnim zglobovima) .
Treće, pri približavanju graničnom položaju često postaje teško održati držanje, a ne dolazi samo do prevrtanja „otvrdnulog tijela“ oko linije prevrtanja, već do promjene držanja pri padu. Ovo se značajno razlikuje od otklona i prevrtanja krutog tijela oko lica prevrtanja (naginjanja).
Dakle, uglovi stabilnosti u ograničeno stabilnoj ravnoteži karakterišu dinamičku stabilnost kao sposobnost uspostavljanja ravnoteže. Prilikom utvrđivanja stabilnosti ljudskog tijela također je potrebno uzeti u obzir granice područja efikasne podrške, pouzdanost održavanja držanja do graničnog položaja tijela i prave linije prevrtanja.
U fizičkim vježbama često se nalazi veza za držanje (tvrda). Tada uvjeti za održavanje ravnoteže zahtijevaju uzimanje u obzir dvosmjerne veze uzimajući u obzir odgovarajuće reaktivne sile uzrokovane takvom vezom.
3. OČUVANJE I VRAĆANJE POLOŽAJA LJUDSKOG TIJELA
Osoba ne samo da može održati ravnotežu, već je i vratiti u slučajevima kršenja. Razlika između ravnoteže biomehaničkih sistema i ravnoteže čvrstih fizičkih tela nije u prisustvu posebnih zakona mehanike za žive sisteme, već u njihovoj složenijoj upotrebi zbog specifičnosti živih sistema.
Statika krutog tijela
Statika razmatra ravnotežne uslove tela ili sistema tela. Ako na tijelo koje miruje djeluje više sila čiji se pravci sijeku u jednoj tački, ono će ostati u mirovanju kada je zbir (vektor) tih sila jednak nuli. Tačka primjene sile može se pomjeriti duž linije njenog djelovanja.
Težište krutog tijela ili sistema tijela
Gravitacija djeluje na svaku česticu tijela. Tačka u kojoj se primjenjuje rezultanta sila gravitacije koje djeluju na pojedine točke tijela naziva se centar gravitacije. Zbir momenata gravitacije svih čestica tijela u odnosu na centar gravitacije jednak je nuli.
Vrste ravnoteže tijela
Ako uz dovoljno malo odstupanje tijela od ravnotežnog položaja nastaju sile koje teže da tijelo vrate u prvobitni položaj, tada se takva ravnoteža naziva održivo.
Obično, nakon djelovanja malih poremećaja (pomjeranja, udara) na tijelo u stabilnoj ravnoteži, ono počinje da oscilira malom amplitudom oko ravnotežnog položaja; te oscilacije se zatim prigušuju trenjem i uspostavlja se ravnoteža.
U položaju stabilne ravnoteže potencijalna energija tijela ima minimalnu vrijednost (pod djelovanjem konzervativnih sila).
Ako, međutim, uz proizvoljno malo odstupanje tijela od ravnotežnog položaja nastaju sile koje teže povećanju ovog odstupanja, tada se takav položaj naziva nestabilno.
U indiferentnom ravnotežnom položaju, kada tijelo odstupi, ne nastaju sile, a novi položaj je također ravnotežni položaj.
Uslovi ravnoteže na kosoj ravni
Za balansiranje tijela s težinom P, na kosoj ravni koja čini ugao α sa horizontom, potrebno je primijeniti silu F jednak F 1 , i F 1 =P sinα sila F treba biti usmjerena duž nagnute ravni (slika 1). U tom slučaju tijelo silom pritiska nagnutu ravan F 2 =P sinα, a nagnuta ravan djeluje istom silom na tijelo koje na njoj leži. Slobodno ležeće tijelo će počivati na nagnutoj ravni sve dok sila kotrljanja ne postane veća od sile statičkog trenja. Ovo će se dogoditi kada tgα > k, gdje k je koeficijent statičkog trenja.
Uvjeti jednakosti momenata sila primjenjuju se i na ravnotežu kapije (sl. 3, a) ili vitla.
Blokovi
Fiksni blok (slika 3b) služi samo za promjenu smjera sile djelovanja. Pokretni blok (slika 3, c) omogućava vam da dobijete povećanje snage. Sa stacionarnim ili jednoliko rotirajućim pokretnim blokom, zbir svega aktivne snage a zbir svih momenata sila jednak je nuli.
Otuda to sledi
Lančana dizalica (slika 4) je sistem pokretnih i fiksnih blokova povezanih u zajednički držač. Ako lančana dizalica ima n pokretnih i n fiksnih blokova, tada je sila F balansirajuća sila P, je jednako F = P/2n.
U odsustvu trenja, sila P, koji djeluje duž ose vijka, balansira se silom F pričvršćen za ručku (slika 5):
| Tijelo | Položaj centra gravitacije |
|---|---|
| tanak štap | U sredini štapa |
| Cilindar ili prizma | U sredini prave linije koja povezuje središta osnova cilindra ili prizme |
| Lopta | U centru |
| Ravni segment male debljine | Na osi simetrije, pomaknut od baze za 2/5 njegove visine |
| piramida ili konus | Na segmentu koji povezuje vrh sa središtem baze; pomaknut za ¼ ovog segmenta |
| Hemisfera | Na osi simetrije, pomaknut od centra za 3/8 polumjera |
| Čvrsta trokutasta tanka ploča | U tački preseka medijana |





