TSU edukativni portal. Velika enciklopedija nafte i gasa
Stranica 1
Stepen pokretljivosti mehanizma je tri. U međuvremenu, kretanje pozornice je prisilno, a dva dodatna stepena pokretljivosti karakterišu sposobnost pozornice i kamena da se samostalno rotiraju oko zajedničke ose BC i ne utiču na zakone kretanja tačaka pozornice i njene ose. .
Stepen pokretljivosti mehanizma ili broj njegovih stupnjeva slobode odgovara broju njegovih vodećih karika, što je neophodno za sigurnost kretanja vođenih karika. Ako, na primjer, mehanizam ima jedan stepen mobilnosti, onda bi ovaj mehanizam trebao imati jednu vodeću kariku. Ako je stepen pokretljivosti jednak tri (w 3), onda mehanizam mora imati tri veze sa datim zakonima kretanja.
Stepen pokretljivosti mehanizma određen je brojem vodećih karika, čiji su zakoni kretanja dati.
Stepen mobilnosti mehanizma je broj nezavisnih parametara koji se moraju postaviti da bi se odredio položaj svih njegovih pokretnih karika.
| Mehanizam konhoidografa. a vodeća karika je prva, b vodeća karika. |
Stupanj mobilnosti mehanizma određuje se Chebyshev formulom.
Ako je očekivani stepen pokretljivosti mehanizma /2, potrebno je postaviti vrijednosti dva parametra i odrediti vrijednosti preostalih parametara iz sistema jednadžbi (1.4). Stupanj mobilnosti je f 2 ako su za sve fiksne vrijednosti dva parametra, preostali parametri izračunati iz sistema jednačina (1.4) jednoznačno određeni. Rješenje sistema jednačina (1.4) se po pravilu može izvesti samo numerički pomoću računara.
Ali u ovom slučaju, stepen mobilnosti mehanizma postao bi jednak nuli.
U ovim formulama, w je stepen pokretljivosti mehanizma, n je broj pokretnih karika, p5 p4 p3, Pr PI je broj kinematičkih parova odgovarajućih klasa. Tri varijante kinematičkih lanaca. a dvije grupe asura druge klase, b grupa treće klase, c grupa četvrte klase.| Mehanizam preklopne ploče za helikopter. Primjer podjele na grupe Assur.
Veze koje formiraju pasivne veze i uvode dodatne stepene slobode ne treba uzimati u obzir prilikom izračunavanja stepena pokretljivosti mehanizma.
Povećanje broja stupnjeva slobode manipulatora preko šest daje mu vrijedno svojstvo manevarske sposobnosti, koje se podrazumijeva kao broj stupnjeva slobode mehanizma sa fiksnim radnim tijelom.
Funkcije S3 (φ) i s2 (φ) su jednovrijedne (jedine vrijednosti s3 i s2 odgovaraju fiksnoj vrijednosti φ), stoga je stupanj pokretljivosti mehanizma zaista jednak jedan.
Kinematički lanci prema prirodi relativnog kretanja karika dijele se na ravne i prostorne. Kinematički lanac naziva se ravan ako tačke njegovih karika opisuju putanje koje leže u paralelnim ravnima. Kinematički lanac se naziva prostornim ako tačke njegovih karika opisuju neplanarne putanje ili putanje koje leže u ravninama koje se sijeku.
Prema vrsti karika uključenih u kinematičke lance, potonji se dijele na jednostavne i složene.
Jednostavan lanac je takav lanac u kojem je svaka karika uključena u najviše dva kinematička para (slika 2).
Složeni kinematički lanac je lanac u kojem postoji najmanje jedna karika uključena u više od dva kinematička para (slika 3).
Fig.2 Sl.3
Kinematički lanac se naziva zatvorenim, čija je svaka karika uključena u dva ili više kinematičkih parova.
Otvoreni kinematički lanac je kinematički lanac u kojem su karike uključene u samo jedan kinematički par.
Uz jednak broj pokretnih karika, zatvoreni lanci imaju manje stupnjeva slobode od otvorenih. Zatvorena kola se široko koriste u kinematskim krugovima radnih mašina, alatnih mašina, automatskih mašina itd., Otvorena kola - u krugovima manipulatora i robota.
U mašinama se obično koriste takvi kinematski lanci kod kojih je jedna od karika nepomična, tj. je štand. Na primjer, u motoru unutrašnjim sagorevanjem radilica, klipnjača, klip i cilindar čine kinematički lanac, u kojem je fiksna karika (zupčanik) cilindar sa okvirom motora (sl. 4 a, b).
Veza u mehanizmu na koju se utiče spoljne sile koji ga je pokrenuo zove se vođa. Karika na koju se primenjuju korisni otpori, radi prevazilaženja kojih je mehanizam izgrađen, naziva se vođena karika.

Slika 4 a Slika 4 b
Prilikom proučavanja kinematike mehanizma, kretanje jedne od karika smatra se datim. Zove se ulaz. Veza, čije kretanje žele da odrede u zavisnosti od kretanja ulaza, naziva se izlaz. U našem primjeru, klizač je izlazna veza, ručica je ulazna veza.
> Stepen pokretljivosti ravnog kinematičkog lanca
kinematičkog parnog lanca ravnog mehanizma
Svaki slobodno telo pri ravno-paralelnom kretanju ima tri stepena slobode, pa su, prije povezivanja K-karika u kinematičke parove, svi imali ZK stepene slobode.
Prilikom povezivanja karika u kinematičke parove, potonji im oduzimaju određeni broj stupnjeva slobode: parovi V klase u ravnim mehanizmima oduzimaju dva stupnja slobode (od tri), ostavljajući jedan; parovi klase IV oduzimaju jedan stepen slobode, ostavljajući dva.
Dakle, ravan kinematički lanac će imati sljedeću količinu slobode:
H = 3K - 2p1 - p2
Ako se jedna karika kinematičkog lanca napravi fiksnom, tada će se broj stupnjeva slobode smanjiti za još tri i, u odnosu na fiksnu kariku, bit će jednak:
W = H - 3 ili W=3(k-1) - 2p1 - p2
Označavajući k - 1 \u003d n (broj pokretnih veza), konačno dobijamo:
W = 3n - 2p1 - p2
n je broj pokretnih karika kinematičkog lanca;
p1 - broj viših parova (preklapanje jednog uvjeta veze);
p2 je broj nižih parova u kinematičkom lancu (koji nameću po dva uslova veze).
Dakle, kinematski lanac motora ima 3 pokretne karike, 3 para rotacije i 1 translatorni par, ukupno 4 donja para. I za nju
W = 3 3 - 2 4 =1
Broj stupnjeva slobode kinematičkog lanca u odnosu na fiksnu kariku W naziva se stupanj pokretljivosti kinematičkog lanca.
Formulu za određivanje stepena pokretljivosti kinematičkog lanca prvi je dobio poznati ruski naučnik P. L. Čebišev 1869. godine i nosi njegovo ime. Ova formula je prikladna samo za planarne kinematičke lance.
S obzirom na različite kombinacije ovih brojeva, mogu se dobiti grupe različite vrste. Sve grupe dobijene na ovaj način mogu se podijeliti u klase.
Razmotrite strukturnu klasifikaciju ravnih mehanizama.
Uslovno nazovimo vodeću kariku i stalak, koji čine kinematički par klase V, mehanizmom klase I (slika 5).
Formiranje bilo kojeg planarnog mehanizma može se predstaviti kao sekvencijalno vezivanje grupa veza koje zadovoljavaju uslov W = 0 na početni mehanizam.
vodeći link vodeća veza
Na primjer, prva grupa (slika 6.a) je vezana za jedan mehanizam klase I (vodeća karika i stalak), sljedeća grupa - ili na karike prve grupe, ili djelomično na karike prve grupe i vodeću vezu ili na stalak, itd.
Mehanizmi formirani vezivanjem nekoliko grupa na mehanizam klase I, kao i sam mehanizam, imaju stepen mobilnosti jednak jedan, budući da grupe ne menjaju stepen mobilnosti mehanizma za koji su vezane.
Mehanizmi se takođe mogu formirati udruživanjem grupa istovremeno sa nekoliko mehanizama klase I (slika 6.b). U ovim slučajevima, stepen mobilnosti dobijenih mehanizama biće jednak broju mehanizama klase I za koje su takve grupe vezane, tj. broj vodećih karika rezultirajućeg mehanizma.
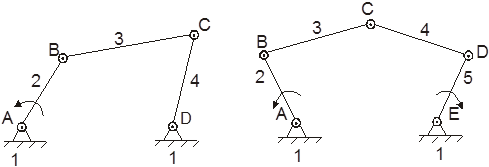
a) 2 - vodeća karika b) 2 i 5 - vodeća karika
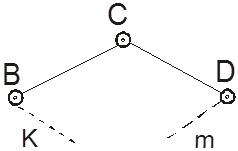
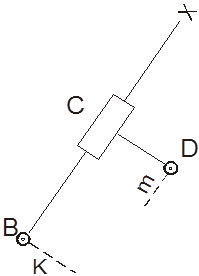
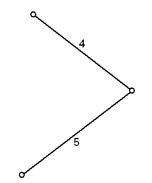
Grupa karika (slika 7), koja ima dvije karike i tri para klase V, naziva se grupa II klase drugog reda ili dvovodna grupa Assur. (Pričvršćivanje ove grupe na glavni mehanizam se vrši pomoću dva povodca BC i CD).
Redoslijed grupe određen je brojem elemenata s kojima je grupa vezana za glavni mehanizam.
Mehanizmi, koji uključuju grupe klasa koje nisu veće od druge, nazivaju se mehanizmima klase II.
Svi naredni tipovi grupe II klase mogu se dobiti zamjenom pojedinačnih rotacijskih parova translacijskim parovima.
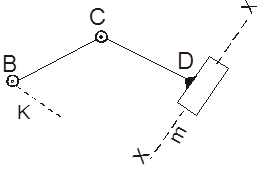
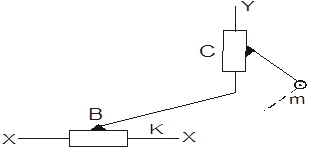
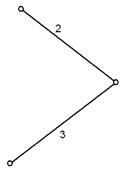
Drugi tip je onaj kod kojeg je jedan od ekstremnih rotacijskih parova zamijenjen translacijskim parom (slika 8).
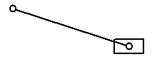
Treći tip - translacioni par je zamenjen srednjim rotacionim parom (slika 9).
Četvrti pogled - dva ekstremna rotaciona para su zamenjena sa dva translaciona para (slika 10).

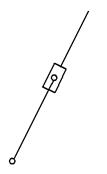
Peti tip - translacioni parovi su zamenjeni ekstremnim i srednjim rotacionim parovima (slika 11).
Dakle, u ravnim mehanizmima sa rotacionim, translacionim i višim parovima klase IV i V postoji pet grupa klase II. Većina savremenih mehanizama koji se koriste u tehnici spadaju u klasu II mehanizama.
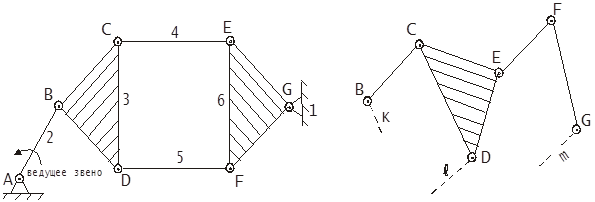
Razmotrimo sada drugu moguću kombinaciju broja karika i kinematičkih parova. Sledeća grupa po broju karika treba da sadrži četiri karike i šest parova klase V (slika 12). Za ovu kombinaciju mogu se dobiti tri vrste kinematičkih lanaca čiji su strukturni principi formiranja različiti.
Prvi kinematički lanac je složeniji otvoreni kinematički lanac i spada u grupu III klase trećeg reda i naziva se trovodna grupa.
EFC veza je osnovna veza.
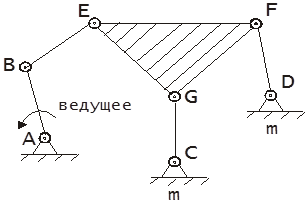
Mehanizmi, koji uključuju grupe koje nisu veće od grupa trećeg reda klase III, nazivaju se mehanizmi klase III (slika 13).
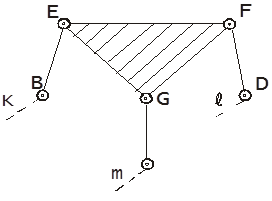
Drugi kinematički lanac je zatvoreni kinematički lanac, koji je vezan za karike "k" i "m" glavnog mehanizma ne elementima uzica, već slobodnim elementima B i G koji pripadaju osnovnim karikama (Sl. 14 ).
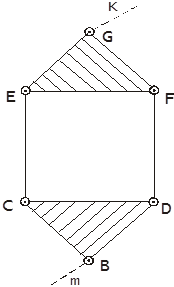
Ova grupa, pored dvije osnovne jedinice BCD i EGF, koje čine dvije krute zatvorene petlje, ima i jedan pokretni četverostrani CEFD zatvorene petlje (Sl. 15).
Grupe koje uključuju pokretna četvorostrana zatvorena kola klasifikuju se kao grupe klase IV.
Treći tip kinematičkog lanca: ovaj lanac se raspada u dvije jednostavne grupe klase II - BCD i EFG - i stoga pripada onima koje smo prethodno razmatrali i ne predstavlja ništa suštinski novo (Sl. 16).
Rice. 1.15 Sl.1.16
Dakle, grupa II klase uključuje jednostrano kolo, grupa III klase - trostrano zatvoreno kolo, grupa IV klase - zatvoreno četvorostrano kolo. Sve razmatrane grupe se dobijaju odgovarajućim promenama u strukturi kontura.
Generalizirana koordinata mehanički sistem(mehanizam) naziva se nezavisna koordinata koja na jedinstven način određuje položaj sistema u prostoru.
Broj generaliziranih koordinata određuje broj stupnjeva slobode sistema.
besplatno solidan(link) u prostoru ima 6 stepeni slobode, tj. može napraviti 3 neovisna translatorni pokreti duž međusobno okomitih osa i 3 rotirajuća kretanja oko istih osa.
Ako je karika uključena u kinematičku paru, tada je njeno relativno kretanje, tj. određena ograničenja su nametnuta kretanju u odnosu na drugu kariku uključenu u ovaj par. Ova ograničenja se nazivaju uslovi veze - S.
Prema broju uslova povezivanja nametnutih relativnim kretanjima veza, parovi se dijele na klase.
Klasa kinematičkog para odgovara broju uslova veze nametnutih relativnom kretanju karika uključenih u ovaj par.
U zavisnosti od načina povezivanja karika u kinematičku paru, broj uslova povezivanja može varirati od 1 do 5.
Stoga se svi kinematički parovi mogu podijeliti u 5 klasa.
Klasa I uključuje parove koji nameću jedan uslov na relativno kretanje karika (5 pokretnih parova).
Klasa II uključuje parove koji nameću dva uslova (4-pokretno) itd.
Ako se kretanju karike u prostoru ne nameću uvjeti veze, onda ona ima 6 stupnjeva slobode.
Zatim, ako je broj karika u kinetičkom lancu K, onda ukupan broj stepeni slobode koje K karike imaju pre nego što se povežu u kinetički lanac - 6 K
(stepen slobode) prije spajanja na kinematski lanac.
Povezivanje karika u kinematičkom lancu nameće različit broj veza na relativno kretanje karika, u zavisnosti od klase parova.
onda je iz 6k stupnjeva slobode koje su karike imale prije ulaska u kinematičke parove potrebno isključiti one stepene slobode koji se oduzimaju ulaskom karika u kinematičke parove.
Tada će broj stupnjeva slobode H koje ima kinematički lanac biti jednak:
Broj W stupnjeva slobode kinematičkog lanca u odnosu na stalak naziva se broj stupnjeva nepokretnosti (stepen nepokretnosti) kinematičkog lanca.
Zamjena (1) u (2):
ako označimo () kroz n, dobijamo:
gdje je n broj pokretnih karika kinematičkog lanca.
Ova jednakost se naziva formula mobilnosti ili formula Somov-Malyshev.
|
|
| a) kinematski lanac |

Stepen pokretljivosti mehanizma W je broj nezavisnih pokreta koje je potrebno dovesti do mehanizma da bi se dobio jedan izlaz ili obrnuto.
Za ravne mehanizme se primjenjuje formula Chebyshev:
W \u003d 3n - 2p 1 - p 2,(2.1)
gdje n- broj pokretnih dijelova mehanizma;
p1- broj jednokretnih kinematičkih parova;
p2- broj dvopokretnih kinematičkih parova.
U prostornim mehanizmima, stepen mobilnosti je određen formulom Somova-Malysheva:
W \u003d 6n - 5p 1 - 4p 2 - 3p 3 - 2p 4 - p 5,(2.2)
gdje p 3- broj tropokretnih kinematičkih parova;
p 4- broj četvoropokretnih kinematičkih parova;
p 5- broj pet pokretnih kinematičkih parova.
Većina mehanizama ima određeni stepen mobilnosti W=1. Oni se nazivaju racionalnim. Ovi mehanizmi nisu osjetljivi na greške u montaži, proizvodnji i deformaciji. Takvi mehanizmi ne zahtijevaju uhodavanje.
Za diferencijalne zupčanike W=2, za robote i manipulatore Š=4-8, na glavnom mehanizmu bagera W=4. Ako a W=0, onda dobijamo fiksnu strukturu - farmu.
Strukturni princip formiranja mehanizama. Assur grupe
Osnovni princip formiranja mehanizama prvi je formulisao 1916. godine ruski naučnik Leonid Vladimirovič Asur, profesor na Politehničkom institutu u Sankt Peterburgu.
Prema ideji L.V. Assura, svaki mehanizam se formira serijskim povezivanjem na vodeće karike i stalak kinematičkih lanaca koji zadovoljavaju uslov da je stepen njihove pokretljivosti W=0.
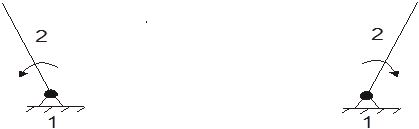
Vodeća karika uključena u kinematičku paru sa jednim pokretom sa stalkom čini početni mehanizam.(Sl. 2.1 a, b).
Vodeća karika može biti ili poluga ili klizač. Početnom mehanizmu je dodijeljena 1 klasa. Stepen pokretljivosti početnog mehanizma W =1.
 Kinematički lanci, u kojima je stepen pokretljivosti W=0, nazivaju se Assur grupe.
Kinematički lanci, u kojima je stepen pokretljivosti W=0, nazivaju se Assur grupe.
|
|||||
|
|||||
|
|||||
Početni mehanizam Assura grupe Assura Group
mehanizam II klase II klase
Koristeći gornje definicije, možemo reći da se bilo koji mehanizam formira dodavanjem Assur grupa početnom mehanizmu.
Vrste assur grupa II klase
Razmotrimo kinematičke lance, koji uključuju samo jednokrećuće kinematičke parove.
Za grupu Assura
![]() ili (2.3)
ili (2.3)
Budući da broj kinematičkih parova mora biti cijeli brojevi, broj veza u grupi Assur može biti samo paran broj. Stoga se jednakost (2.1) može zadovoljiti sljedećim nizom brojeva:
n(broj pokretnih dijelova) 2 4 6
p1(broj jednokrevetnih parova) 3 6 9
Assur grupa klasa II III IV itd.
Grupa Asura klase II može uključivati: 2 pokretne karike i 3 kinematička para , koji su potrebni za pričvršćivanje karika na stalak ili na druge karike. Ako označimo rotacijski kinematički par AT i progresivna P, tada su moguće sljedeće vrste Assur grupa II klase:
1.VVV(sl.2.2); 2. BDP(sl.2.3); 3. ERW(sl.2.4); 4. PPV (slika 2.5); 5. PVP (slika 2.6).

Sl.2.2 Sl.2.3 Sl.2.4
 |

Sl.2.5 Sl.2.6.
Čini se da bi, slijedeći put zamjene rotacijskih parova translatornim, bilo moguće zamijeniti sva tri rotirajuća para translacijskim ( RFP). Ali u ovom slučaju, kada se pričvrsti na stalak, ova grupa Assur će se pretvoriti u ravan mehanizam sa samo translatornim parovima - klinasti mehanizam (slika 1.7).
Grupe assur razlikuju unutrašnje i vanjske kinematičke parove.
Određivanje stepena pokretljivosti mehanizma
Određivanje stepena pokretljivosti prostornog kinematičkog lanca
Neka imamo n karika iz kojih je sastavljen kinematički lanac. Dok veze nisu povezane u kinematičke parove, svaka od njih ima šest stupnjeva slobode (stepena slobode). Stoga su sve karike prije spajanja u kinematički lanac imale 6n stupnjeva slobode. Nakon sklapanja karika u kinematski lanac, dobićemo kinematičke parove različitih klasa (s različitim stepenom pokretljivosti). Pretpostavimo da naš kinematski lanac ima kinematičke parove svih pet klasa. Prihvatamo sljedeću notaciju:
P 5 - broj kinematičkih parova pete klase u kinematičkom lancu koji smo formirali,
P 4 - broj kinematičkih parova četvrte klase,
P 3 - broj kinematičkih parova treće klase,
P 2 - broj kinematičkih parova druge klase,
P 1 - broj kinematičkih parova prve klase.
Svaki kinematički par ograničava kretanje karika, oduzima im onoliko stupnjeva slobode koliko je njegova klasa. Svaki kinematički par 5. klase bira 5 stupnjeva slobode iz karika. Svi parovi pete klase biće oduzeti od karika 5P 5 stepeni slobode, četvrte klase - 4P 4, trećeg - 3P 3, drugog - 2P 2, prvog - 1P 1. Ako se od ukupnog broja stepeni slobode karika 6n oduzmu svi izgubljeni stepeni slobode, dobija se broj stepeni slobode kinematičkog lanca W:
W \u003d 6n-5P 5 -4P 4 -3P 3 -2P 2 -1P 1. (jedan)
Stepen pokretljivosti mehanizma Uobičajeno je da se imenuje broj nezavisnih koordinata koje je izuzetno važno postaviti za određivanje položaja karika mehanizma u koordinatnom sistemu koji je kruto povezan sa stalkom.
Mehanizam se razlikuje od kinematičkog lanca po tome što ima jednu kariku potpuno fiksiranu. Fiksna veza je izgubila svih šest stepeni slobode. Dakle, broj pokretnih karika u mehanizmu je n-1. Zamjenom broja pokretnih karika n-1 u formulu (1) dobijamo formulu za određivanje stepena pokretljivosti mehanizma:
W=6(n-1)-5P 5 -4P 4 -3P 3 -2P 2 -1P 1 . (2)
Formulu (2) je prvi dobio Malyshev za prostorne mehanizme.
Razmotrite formulu Malysheva za određivanje stupnja pokretljivosti ravnih mehanizama. Sve karike ravnog mehanizma mogu imati tri stepena slobode, a kinematski parovi mogu imati 1 ili 2 stepena slobode. Ako se planarni kinematički parovi razmatraju po klasama, onda su oni samo pete i četvrte klase. Istovremeno, izuzetno je važno uzeti u obzir da je ukupan broj stepeni slobode svih karika ravnog mehanizma 3(n-1). Parovi pete klase gube dva stepena pokretljivosti, četvrti - jedan. Dakle, stepen mobilnosti ravnog mehanizma mora se odrediti formulom:
W=3(n-1)-2P 5 -P 4 . (3)
Formulu (3) za određivanje stepena pokretljivosti ravnog mehanizma prvi je dobio P. L. Čebišev.
Uzimajući u obzir zavisnost broja opštih uslova odnosa nametnutih mehanizmu, mehanizmi se dijele na porodice.
Familije mehanizama i njihove strukturne formule prikazane su u tabeli 1.
Tabela 2.1 Strukturne formule različitih porodica mehanizama

Razmotrite aplikaciju strukturnu formulu Chebyshev P. L. na konkretnom primjeru. Slika 5 prikazuje zglobnu četverokraku.
1e- veza- ručica- urezuje rotaciono kretanje oko ose O ( puni okret);
2e- karika AB - klipnjača - vrši ravnoparalelno kretanje;
3e- BC veza - klackalica (ili balansir) - vrši povratno rotaciono kretanje oko C ose ( nepotpuni promet);
4e- OS link - postolje (krevet) - fiksna veza.
Broj veza n=4. Kinematički parovi: 4-1, 1-2, 2-3, 3-4. Imamo 4 jednokrevetna para 5 th klasa. Relativno kretanje svih karika je ravno. Mehanizam je ravan. Određujemo stepen njegove mobilnosti prema formuli Chebyshev P. L.:
W=3(n-1)-2P 5 -P 4 =3(4-1)-2×4-0=1.
Mehanizam ima stepen mobilnosti jednak 1. To znači da je dovoljno postaviti jednu koordinatu na bilo koju kariku mehanizma u koordinatnom sistemu koji je kruto povezan sa okvirom kako bi se odredile pozicije svih ostalih karika. Na primjer, u našem slučaju dovoljno je podesiti kut rotacije poluge j 1 .
 Pasivne veze i redundantne veze
Pasivne veze i redundantne veze
Karike i kinematički parovi, koji ne utiču na prirodu kretanja mehanizma u celini, nazivaju se suvišne (ekstra) veze i parovi, a njima uslovljene veze nazivaju se pasivne veze.
Prilikom određivanja stepena pokretljivosti mehanizma ne treba uzeti u obzir redundantne karike i kinematičke parove.
U složenim štapnim mehanizmima nije uvijek moguće odrediti stupanj pokretljivosti na oko. U ovim slučajevima izuzetno je važno koristiti formulu Čebiševa.
 Definirajmo W mehanizma dvostrukog paralelograma (slika 6). Ovdje AB=BC=KM=MN; AN || BM || CK; AN=BM=CK i AC || K.N. Sa takvim odnosom karika, mehanizam ima W=1, odnosno dovoljno je postaviti poziciju karike 1 za ugao j 1 da bi se odredile pozicije svih ostalih karika. Ako fiksirate vezu 1 u bilo kojoj poziciji, tada će preostale veze biti nepomične. Definiramo W po Čebiševovoj formuli. Broj karika - n=5, kinematičkih parova 5 th klasa R 5 =6, broj kinematičkih parova četvrte klase - R 4 =0.
Definirajmo W mehanizma dvostrukog paralelograma (slika 6). Ovdje AB=BC=KM=MN; AN || BM || CK; AN=BM=CK i AC || K.N. Sa takvim odnosom karika, mehanizam ima W=1, odnosno dovoljno je postaviti poziciju karike 1 za ugao j 1 da bi se odredile pozicije svih ostalih karika. Ako fiksirate vezu 1 u bilo kojoj poziciji, tada će preostale veze biti nepomične. Definiramo W po Čebiševovoj formuli. Broj karika - n=5, kinematičkih parova 5 th klasa R 5 =6, broj kinematičkih parova četvrte klase - R 4 =0.
W=3(n-1)-2P 5 -P 4 =3(5-1)-2×6-0=0.
Ako je W=0, onda ne bi trebao postojati mehanizam, već kruta farma. Vidimo da mehanizam može izvršiti kretanje. U slučaju da u ovaj mehanizam mentalno uklonite vezu 5 (ili 2), tada će priroda kretanja preostalih karika ostati nepromijenjena. Mehanizam se pretvara u običnu četiri kariku, W za koju smo već odredili - W=1. Kada se karika 5 eliminiše, istovremeno se eliminišu 2 kinematička para: 5-1, 5-3. Shodno tome, u ovom mehanizmu jedna karika i dva kinematička para su redundantni.
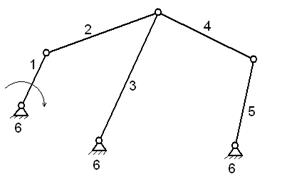
 Razmotrimo još jedan primjer - Marcusov mehanizam, koji se često koristi kao pogon za pokretni transporter (slika 7). Broj veza n=6. Kinematički parovi: 6-1, 1-2, 2-3, 2-4, 3-4, 3-6, 4-5, 5-6 sve pete klase R 5 = 8, R 4 = 0 .
Razmotrimo još jedan primjer - Marcusov mehanizam, koji se često koristi kao pogon za pokretni transporter (slika 7). Broj veza n=6. Kinematički parovi: 6-1, 1-2, 2-3, 2-4, 3-4, 3-6, 4-5, 5-6 sve pete klase R 5 = 8, R 4 = 0 .
Definiramo W po Čebiševljevoj formuli:
W=3(n-1)-2P 5 -P 4 =3(6-1)-2×8-0=-1.
Prema šemi mehanizma, može se vidjeti da će raditi i W=1.
Neka ne postoji direktna veza veza 2-3. Karike 3, 4, 5 će i dalje zauzeti poziciju koja odgovara kutu rotacije j 1 karike 1, pošto karike 1, 2, 4 moraju biti fiksirane pod tim uglom. Isto se može dobiti ako se ukloni kinematički par 2-4 ili 4-3. Ovdje je jedan kinematički par suvišan. Može se zanemariti. onda:
Š=3(6-1)-2×7=1.
Istovremeno, napominjemo da eliminacija veze podrazumijeva eliminaciju nekih kinematičkih parova.
Hostirano na ref.rf
Eliminacija kinematičkih parova (prestanak kontakta karika) ne povlači za sobom neizbježno eliminaciju karika uključenih u njega.
Povezivanje linkova, gdje su spojene 3 ili više veza, obično se naziva čvor. U čvoru je jedan kinematički par manje od veza.
 Previše kinematičkih parova i karika nameću dodatne uslove za tačnost izrade mehanizma, međutim, unatoč tome, u mehanizam se ponekad uvodi pasivna veza ili dodatna veza kako bi se dobile dodatne potrebne kvalitete; povećanje snage, smanjenje trenja itd.
Previše kinematičkih parova i karika nameću dodatne uslove za tačnost izrade mehanizma, međutim, unatoč tome, u mehanizam se ponekad uvodi pasivna veza ili dodatna veza kako bi se dobile dodatne potrebne kvalitete; povećanje snage, smanjenje trenja itd.
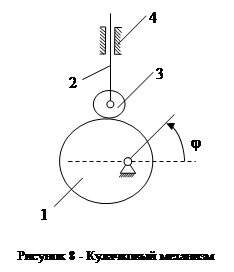
Odredimo W bregastog mehanizma prikazanog na slici 2.8. Ovdje su karike 1 - bregasta, 2 - potiskivač, 3 - valjak, 4 - stalak. Broj veza n=4. Kinematički parovi 1-4, 2-4, 2-3 pete klase i 3-1 - najviši ravni kinematički par 4 th klasa.
Kada se zupčanik zakrene za ugao j, potiskivač će zauzeti određeni položaj. Na prvi pogled W=1. Definiramo W po Čebiševljevoj formuli:
Š=3(4-1)-2×3-2=2.
Ovdje postoji dodatni stepen mobilnosti. Ako je valjak fiksiran potiskom, tada bi W mehanizma bio jednak jedan. Rotacija valjka u odnosu na ostale karike nema efekta. Ugao rotacije valjka je dodatni stepen slobode mehanizma.
Dodatni stepen slobode Uobičajeno je da se takav stepen slobode u kretanju nekih karika naziva, čije uklanjanje ne uzrokuje promjene u prirodi kretanja drugih karika za kinematička razmatranja.
Ovo se odnosi na apsolutno ili relativno kretanje veze. Eliminacija dodatnog stepena slobode ne povlači za sobom eliminaciju veze.
Prije upotrebe Čebiševljeve formule, izuzetno je važno mentalno isključiti pasivna ograničenja i dodatne stupnjeve slobode iz razmatranja.
Formula Čebiševa općenito daje tačan odgovor. U opštim slučajevima, pasivne veze i dodatni stepeni slobode ne postoje i postoje samo u posebnim slučajevima.
Na primjer: mehanizam dvostrukog paralelograma je poseban slučaj istog mehanizma kada veze nisu paralelne (slika 9a); Markusov mehanizam je poseban slučaj mehanizma, kada se osi zakretnih zglobova karika 2, 4 ne poklapaju (slika 9b); okrugli valjak je konkretniji slučaj geometrijskog oblika valjka okruglog oblika(Slika 9c).
Dakle, formula Čebiševa omogućava identifikaciju karakteristike(posebno) mehanizama.
Određivanje stepena pokretljivosti mehanizma - pojam i vrste. Klasifikacija i karakteristike kategorije "Određivanje stepena pokretljivosti mehanizma" 2014, 2015.





