Tayanch tushunchalar va mustaqil ishlarni bajarishga misol
bog'lanish
Tutqich mexanizmi - bo'g'inlari faqat aylanma, tarjima, silindrsimon va sharsimon juftlarni tashkil etadigan mexanizm. Tutqichli mexanizmga misol sifatida tirgak mexanizmi - tutqich mexanizmlarini kam mexanizmlar bilan bog'laydigan qurilma. Bunday ulanishlar ikkita versiyada amalga oshiriladi:
1) izchil;
2) parallel.
Ko'pgina hollarda, shisha-qo'l mexanizmi deb tushuniladi parallel ulanishlar. Cam-tutqich mexanizmlari harakat jarayonida tutqich mexanizmlari bo'g'inlarining uzunligini o'zgartirish va shunga mos ravishda harakatning belgilangan qonunlarini olish va ish faoliyatini yaxshilash uchun ishlatiladi. Tutqich mexanizmlari eng ko'p tishli mexanizmlar yoki tishli dastagi mexanizmlari bilan birgalikda qo'llaniladi. Ushbu turdagi mexanizmlar bir-biri bilan o'zaro ta'sir qiluvchi tishli va tutqich mexanizmlarini o'z ichiga olgan qurilmalar bo'lib, ularning ulanishlari ketma-ket yoki parallel bo'lishi mumkin.
Mashinasozlik sanoatida turli xil dastgohlar, mashinalar va avtomatik boshqaruv tizimlarida, asosan, parallel ulangan tishli tutqichli mexanizmlar qo'llaniladi. Xususan, Rim deb ataladigan mexanizm qo'llaniladi - yig'ish dastagi orqali boshqariladigan slayderli etti bo'g'inli mexanizm va ikkita tishli bir-biriga bog'lab turadigan ikkita bog'lovchi novda. Bunday mexanizmda qo'l yoki vites haydovchi yoki qul bo'lishi mumkin. Bir qator variantlardagi tishli dastagi mexanizmlari odatda ikkita juft o'zaro ta'sir qiluvchi vitesni o'z ichiga oladi, ulardan biri tutqich mexanizmining aloqasi bilan bog'langan. Umuman olganda, tishli dastagi mexanizmlari bo'g'inlar harakatining turli qonunlarini olish, takomillashtirish imkonini beradi quvvat xususiyatlari butun mexanizm. Ko'pgina hollarda tishli dastagi mexanizmlari qo'llanmalar va uzatish mexanizmlari sifatida ishlatiladi (ayniqsa, Rossiya sanoat va iqtisodiy kompleksining ko'plab tarmoqlarida qo'llaniladigan avtomatik mashina liniyalarida).
muallif Mualliflar jamoasiQisqichbaqa mexanizmi - bu teshilgan lentani (xususan, kino proyektorlari yoki kinokameralardagi plyonkalarni) tsiklik tortish uchun qurilma. Bunday mexanizm intervalgacha bir tomonlama harakatni amalga oshiradi. Qopqoq mexanizmi sifatida
Kitobdan Katta ensiklopediya texnologiya muallif Mualliflar jamoasiTishli mexanizm Murakkab tishli mexanizm - bu ikkitadan ortiq vites ishtirok etadigan tishli mexanizmli qurilma. Qurilmalar ham o'ziga xos strukturaviy texnologiya sifatida, ham ketma-ketlik yordamida ishlab chiqilishi mumkin.
"Buyuk texnologiya ensiklopediyasi" kitobidan muallif Mualliflar jamoasi "Buyuk texnologiya ensiklopediyasi" kitobidan muallif Mualliflar jamoasiShisha mexanizmi - bu kamerani o'z ichiga olgan mexanizm. Rossiya sanoat-xo'jalik majmuasining turli tarmoqlarida kamera mexanizmlari turli xil versiyalarda keng qo'llaniladi.Birinchi variant: mexanizmda kamera ishlaydigan mexanizmga ega.
"Buyuk texnologiya ensiklopediyasi" kitobidan muallif Mualliflar jamoasiRoker mexanizmi Roker mexanizmi qo'l mexanizmi bo'lib, rokerni o'z ichiga oladi. Turli mashinalarda, dastgohlar va boshqa uskunalar keng qo'llaniladi har xil turlari roker mexanizmi: 1) roker-slayder mexanizmi; 2) krank-roker
"Buyuk texnologiya ensiklopediyasi" kitobidan muallif Mualliflar jamoasiMexanizm - bu bir necha elementlardan (yoki bo'g'inlardan) tashkil topgan va bir yoki bir nechta qattiq elementlarning harakatini ushbu tizimning boshqa elementlarining zarur harakatlariga aylantirish uchun mo'ljallangan tizim. Mexanizmlar quyidagilar bilan tavsiflanadi: 1) mexanik
"Buyuk texnologiya ensiklopediyasi" kitobidan muallif Mualliflar jamoasiTutqich mexanizmi Tutqich mexanizmi bu mexanizm bo'lib, uning bo'g'inlari faqat aylanma, translatsiya, silindrsimon va sferik juftlarni hosil qiladi. Tutqich mexanizmiga misol sifatida tirgak mexanizmi - ulanish bo'lgan qurilma
"Buyuk texnologiya ensiklopediyasi" kitobidan muallif Mualliflar jamoasiQatlama mexanizmi Buklama mexanizmi qog'oz varag'ini buklash uchun mo'ljallangan qurilma bo'lib, matbaa ishlarida keng qo'llaniladi.Ushbu mexanizm quyidagicha ishlaydi: oziqlantiruvchi tsilindr aylanganda qog'oz varag'i harakatlanadi.
"Buyuk texnologiya ensiklopediyasi" kitobidan muallif Mualliflar jamoasiIshqalanish mexanizmi Ishqalanish mexanizmi - bu bir-biriga bosilgan elementlar orasidagi ishqalanish kuchlari hisobiga harakat, tezlanish yoki tormozning uzatilishi amalga oshiriladigan qurilma. Qattiq elementlardan tashkil topgan ishqalanish mexanizmida (transmissiyada, debriyajda,
6.1. Muammoning bayoni, sintez turlari va usullari
Umumiy holatda tutqich mexanizmlarini sintez qilish muammolari strukturaviy, kinematik va dinamik hisoblash bosqichlarini o'z ichiga olgan optimal loyihalashning murakkab muammolari hisoblanadi. Shuning uchun yechimni soddalashtirish uchun faqat ba'zi (asosiy) dizayn shartlari hisobga olinadigan alohida muammolar ko'rib chiqiladi.
Dastlabki ma'lumotlarga qarab, sintezning quyidagi turlari ajratiladi:
Geometrik, bo'g'inlarning alohida pozitsiyalari yoki alohida nuqtalarning traektoriyalari berilganda;
Kinematik, ma'lum tezliklar, tezlashtirishlar yoki ularning nisbatlari berilganda;
Dinamik, ta'sir qiluvchi kuchlar berilganda yoki dinamik parametrlarga ba'zi cheklovlar qo'yilganda.
Sintez usullariga quyidagilar kiradi:
a) eksperimental, berilgan traektoriyani amalga oshirish uchun bog'lamlarning o'lchamlari eksperimental ravishda tanlanganda;
b) grafik;
c) analitik.
Yuqorida sanab o'tilgan sintez turlari va usullarining turli xil kombinatsiyalari mumkin.
6.2. Rod mexanizmlarini optimal sintez qilish masalalarini yechish
Optimal sintez masalasini qo'yishda kirish va chiqish parametrlarini farqlash kerak.
Kirish parametrlari dastlab o'rnatiladigan parametrlar (bog'lanish o'lchamlari, tezliklar, tezlashtirishlar yoki ularning nisbatlari).
Chiqish parametrlari muammoni hal qilish natijasida aniqlangan parametrlardir.
Sintezlashda kinematik, konstruktiv, texnologik va hokazolarning bir qator talablarini hisobga olish kerak, ulardan biri, qoida tariqasida, asosiy, qolganlari esa ikkinchi darajali (qo'shimcha). Agar asosiy talab funktsiya sifatida matematik tarzda yozilsa, qaerda  - chiqish parametrlari, keyin bunday funktsiya chaqiriladi maqsad funktsiyasi(maqsad), sifatida ifodalangan qo'shimcha shartlar esa cheklovlar deyiladi.
- chiqish parametrlari, keyin bunday funktsiya chaqiriladi maqsad funktsiyasi(maqsad), sifatida ifodalangan qo'shimcha shartlar esa cheklovlar deyiladi.
Optimal sintezning vazifasi barcha cheklovlarni hisobga olgan holda Z ning ekstremal qiymatini ta'minlashdir.
Masalan, mexanizmning og‘irligini uning parametrlarining (bo‘g‘in uzunliklari) Z funksiyasi sifatida ifodalash orqali uning mavjudligi sharoitlarida Z ni minimallashtirish masalasini hal qilish mumkin. Bu shartlarga krankni bo'g'imli to'rt barli bog'lanishda aylantirish shartlari, berilgan bosim burchagini ushlab turish sharti va boshqalar kiradi.
Kichik miqdordagi chiqish parametrlari bilan optimallashtirish muammosining echimini analitik shaklda olish mumkin. Aks holda, optimal echimlarni yo'naltirilgan, tasodifiy yoki kombinatsiyalangan qidirishning raqamli usullari qo'llaniladi.
6.3. To'rt bo'g'inli bo'g'inda krankning aylanish shartlari
P  To'rt mentli mexanizmni loyihalashda (sintez qilishda) e'tiborga olinishi kerak bo'lgan shartlardan biri bo'g'inlarning tirsakliligi, ya'ni bir yoki ikkita krankning mavjudligi bo'lishi mumkin. Bu ulanishlar uzunligi nisbatiga bog'liq. Masalan, to'rt bo'g'inli zvenoning AB zvenosi (37-rasm) krankka aylanishi uchun u ketma-ket ikkita ekstremal holatdan o'tishi kerak. Mexanizmning uchta pozitsiyasidan foydalanib, biz quyidagi shartlarni olamiz:
To'rt mentli mexanizmni loyihalashda (sintez qilishda) e'tiborga olinishi kerak bo'lgan shartlardan biri bo'g'inlarning tirsakliligi, ya'ni bir yoki ikkita krankning mavjudligi bo'lishi mumkin. Bu ulanishlar uzunligi nisbatiga bog'liq. Masalan, to'rt bo'g'inli zvenoning AB zvenosi (37-rasm) krankka aylanishi uchun u ketma-ket ikkita ekstremal holatdan o'tishi kerak. Mexanizmning uchta pozitsiyasidan foydalanib, biz quyidagi shartlarni olamiz:
1, 2, 3-pozitsiyalar uchun havolalarning uzunligini oldindan ko'rsatgan holda:
Bunda:
ya'ni krank va boshqa har qanday bo'g'inning uzunliklari yig'indisi qolgan bo'g'inlar yig'indisidan kichikdir.
Biz juftlik bilan olingan tengsizliklarni qo'shamiz va olamiz:


 , ya'ni krank eng qisqa bo'g'indir. Va agar bu shartlar bajarilmasa, mexanizm ikki krank yoki ikkita rokker bo'ladi. Bu shartlar geometrik sintezda qo'llaniladi.
, ya'ni krank eng qisqa bo'g'indir. Va agar bu shartlar bajarilmasa, mexanizm ikki krank yoki ikkita rokker bo'ladi. Bu shartlar geometrik sintezda qo'llaniladi.
Federal ta'lim agentligi
Davlat ta'lim muassasasi oliy kasbiy ta'lim
"MATI" - Rossiya davlati Texnologiya universiteti nomidagi K.E. Tsiolkovskiy
“Mashina va mexanizmlar mexanikasi” kafedrasi
RUQ MEXANIZMLARINI KUCHNI HISOBI
Mexanizmlar va mashinalar nazariyasi bo'yicha kursni loyihalash bo'yicha ko'rsatmalar
Tuzuvchi: Chufistov V.A. Shuvalova L.S.
Moskva 2006 yil
1. KUCHNI HISOBLASHNING MAQSADLARI VA MAZMUNI
Mexanizmlarning quvvatini hisoblash mexanizmning har bir bo'g'iniga qo'llaniladigan barcha kuchlar va kuchlarning momentlarini aniqlashdan iborat. Bog'lanishlar va kinematik juftlarga ta'sir qiluvchi kuchlarning kattaligi, yo'nalishi va qo'llanilishi nuqtalari mustahkamlik, aşınma qarshilik, ishonchlilik va mexanizmlarni loyihalashning boshqa muammolarini hal qilish uchun keyingi hisob-kitoblar uchun ma'lum bo'lishi kerak. Mexanizm uning bo'g'inlariga qo'llaniladigan barcha tashqi kuchlar ta'sirida, shuningdek uning bo'g'inlarining notekis harakatlanishi natijasida ishlayotganda. kinematik juftliklar reaktsiya kuchlari paydo bo'ladi, ya'ni. zvenolar orasidagi o'zaro ta'sir kuchlari. Quvvatni hisoblashda reaktsiya kuchlari mexanizmning ishlashini baholash va ta'minlash, xususan, podshipniklarni tanlash va hisoblash uchun aniqlanadi.
Quvvatni hisoblashning asosiy vazifasi - mexanizmlarning kinematik juftliklarida reaktsiyani aniqlash, shuningdek, muvozanatlashuvchi kuch yoki kuchlar juftligini (muvozanat momenti) va dvigatel quvvatini aniqlash.
Kuchni hisoblash ishqalanish kuchlari bilan yoki ularsiz amalga oshirilishi mumkin. Ko'pgina mexanizmlarda ishqalanishni bartaraf etish uchun yo'qotishlar kichikdir va ularni e'tiborsiz qoldirish hisobni sezilarli darajada soddalashtirish va qisqartirish imkonini beradi. Kinetostatik hisoblash kuch rejalari usuli bilan yoki professor N.E. Jukovskiy.
Kurs loyihasida mexanizmning kinetostatik hisobi mexanizmning bitta berilgan holati uchun ikkala usulda ham amalga oshiriladi. Olingan natijalar taqqoslanadi va kelishmovchilik 5% dan oshmasligi kerak.
2. KUCHLAR REJALARI USULLARI BO'YICHA KUCHNI HISOBLASH
2.1 Umumiy ma'lumot.
Kuchni hisoblashning kinetostatik usuli d'Alembert printsipiga asoslanadi, unga ko'ra tizimga ta'sir qiluvchi statik yuklarga dinamik yuklar qo'shilsa, tezlashuv bilan harakatlanuvchi tizimga statika tenglamalarini qo'llash mumkin. Statik yuklar bog'lanishlarning og'irligiga bog'liq G i , foydali va zararli qarshilik F . dinamik
yuklar massalarga bog'liq G g i, zvenolarning inersiya momentlari I si, chiziqli
a si zvenolarning massa markazlarining tezlanishlari va zvenolarning burchak tezlanishlari e i .
Yassi mexanizmning har qanday bo'g'inining dinamik yuki uning og'irlik markaziga kamayadi va umumiy holda, asosiy vektor va inersiya kuchlarining asosiy momentidan iborat. Tekis-parallel harakatni amalga oshiradigan yoki qo'zg'almas o'q atrofida bir xilda aylanmayotgan bo'g'inning inertsiya kuchi moduli quyidagi formula bo'yicha hisoblanadi:
bu yerda I si - zvenoning tortishish markaziga nisbatan inersiya momenti. Moment M H i → - e G i bog'lanishning burchak tezlashishiga qarama-qarshi yo'nalishda yo'naltiriladi.
Ishqalanish kuchlari bo'lmasa, translatsiya kinematik juftligidagi reaktsiya yo'riqnomalarga perpendikulyar bo'ladi deb taxmin qilinadi. Agar massa markazi
ning slayderi ilgakka to'g'ri keladi, uning yordamida slayder novda zanjiriga ulanadi, reaksiya ilgak orqali o'tadi va hisoblash vazifasi reaksiyaning kattaligini topishdir. Agar slayderning massa markazi menteşe bilan mos kelmasa, hisoblash vazifasi reaktsiyaning kattaligini va uni qo'llash nuqtasini aniqlashdan iborat. Aylanadigan kinematik juftlikdagi reaktsiya menteşe markazida qo'llaniladi va hisoblash vazifasi uning kattaligi va yo'nalishini aniqlashdir. Ba'zan bunday reaktsiyani ikkita komponent shaklida ifodalash tavsiya etiladi, ulardan biri zveno bo'ylab yo'naltirilgan va normal komponent deb ataladi, ikkinchisi esa unga perpendikulyar bo'lib, teginish komponenti deb ataladi. “K” zvenosiga qo‘llaniladigan reaksiyani “i” zvenosi tomonidan R ik va reaksiya komponentlarini belgilash odatiy holdir.
R n ik va R t ik.
2.2 Dastlabki ma'lumotlar
Mexanizm rejasi.
Burchak aylanish tezligi ō .
Krank holatining koordinatasi s gradus.
S i zvenolarning massa markazlarining pozitsiyalari.
Og'irliklar G i va bo'g'inlarning inersiya momentlari I si .
Foydali qarshilik kuchi (kesish kuchi) F .
2.3. Quvvatni hisoblash ketma-ketligi.
Kinematik juftliklarda ishqalanish kuchlarini hisobga olmasdan quyidagi kuchlarni hisoblash tartibi o'rnatiladi.
2.3.1. Krankning berilgan pozitsiyasi uchun mexanizm rejasini tuzamiz
ichida tanlangan shkala m l.
2.3.2. S i massa markazlarida G i bog'lamlarining og'irliklarini va foydali qarshilik kuchini F slayderga qo'llaymiz. Barcha kuchlar bir xil uzunlikdagi (15 - 20 mm) vektorlar sifatida masshtabsiz tasvirlangan.
2.3.3.m a m/(s2 mm) masshtabda tezlanishlar rejasini tuzamiz. Mexanizm rejasini va tezlashtirish rejasini birinchi varaqdan o'tkazish tavsiya etiladi. O'xshashlik qoidasidan foydalanib, tezlanishlar rejasida bog'lanishlar massa markazlarining tezlanishlarini ifodalovchi vektorlarni va formula bo'yicha topamiz.
a si | = pS i mka ( | ||||
biz tezlanishlarning kattaliklarini o'zimiz hisoblaymiz. Formula (1) ga binoan, biz bog'lanishlarning inertsiya kuchlarini aniqlaymiz, ularni bog'lanishlarning massa markazlarida qo'llaymiz, ularni vektorga teskari yo'nalishda yo'naltiramiz a si .
Tegishli bog'lanishlar uchun burchak tezlanishlarining kattaliklari va yo'nalishlarini topamiz:
ei= | a ti | |||
formula (2) bo'yicha - bir xil bog'lanishlar uchun inersiya kuchlarining momentlari va aylana o'q shaklida biz ularni bog'lanishlarga qo'llaymiz. Bunday holda, inersiya kuchlarining momenti bog'lanishning burchak tezlanishiga teskari yo'nalishda yo'naltirilganligini esga olish kerak.
(shuning uchun mexanizm uchun 2 e 4 = 0 va M 4 = 0). Shaklda. 1a mexanizmning rejasi qurilgan
1, uning bo'g'inlariga qo'llaniladigan statik va dinamik yuklar bilan, shakl. 1b - uning tezlashtirish rejasi. Shunga ko'ra, 2-mexanizm uchun mexanizmning rejasi va tezlashtirish rejasi rasmda tasvirlangan. 2a,b, mexanizm 3 uchun - rasmda. 3a,b va mexanizm 4 uchun - shakl. 4a, b




2.3.4. Mexanizmdan 4 va 5-bo'g'inlardan tashkil topgan strukturaviy guruhni ajratamiz. 1,3 va 4-mexanizmlar uchun bu ma'lum bir modifikatsiyaning 2-dyadidir (5a, 7a-rasm). 1 va 4-mexanizmlarda 5-slayder gorizontal yo'riqnoma bo'ylab harakatlanadi va uning massa markazi S 5 menteşe E bilan mos kelmaydi. 3-mexanizmda
slayder 5 vertikal yo'riqnoma va uning S 5 massa markazi bo'ylab harakatlanadi
ilgakka to'g'ri keladi E. Dyad 4-5, agar unga tashlab qo'yilgan bog'lamlar tomonidan reaktsiyalar qo'llanilsa, muvozanat holatida bo'ladi - rels 6 tomonidan slayderga 5 reaktsiyasi R 65 va yon tomondan R 34 reaktsiyasi. orqa sahna 3 bog'lovchi novda 4. Reaktsiya
tangensial komponent R t 34 | havolaga perpendikulyar 4. |
||||||
Reaksiyaning kattaligi va yo'nalishi | R t34 | tenglama tuzamizmi, aniqlang |
|||||
Menteşe E ga nisbatan 4-bo'g'inga qo'llaniladigan barcha kuchlar soni: |
|||||||
S L (4 yulduz) = S → R t 34; | |||||||
h + G h− | M 4 - R t | DE = 0. | |||||
R t = U 4 h 1 + G 4 h 2 - M 4 | m l. | ||||||
(7) tenglamada kuchlar N ga, kuchlarning qo'llari mm ga, inersiya momenti L 4 Nm ga, diada planining masshtabi -m l m/mm ga almashtiriladi. Agar javob salbiy bo'lsa, Rt 34 reaktsiyasining yo'nalishi teskari bo'lishi kerak.
Rn 34 va R65 reaksiyalarini dan topish mumkin vektor tenglamasi 4-5 diadaga qo'llaniladigan kuchlar yig'indisi.
RG t | +(F G +U | )+R | ||||||||
Pastki kinematik juftliklarga ega tutqichli mexanizmlar zamonaviy mashinasozlikda keng qo'llaniladi. Bunday mexanizmlarning afzalliklari quyidagilardan iborat: yuqori ishlab chiqarish qobiliyati, kinematik bo'g'inlarda rulmanlardan foydalanish imkoniyati, kontakt yuzalarining ozgina aşınması bilan katta kuchlarni uzatish imkoniyati, ishning ishonchliligi va chidamliligi. Ushbu mexanizmlar kamera mexanizmlaridan farqli o'laroq, kinematik juftlarning doimiy yopilishini ta'minlaydigan qurilmalarni talab qilmaydi.
Mexanizmlar texnologik jarayonning talablarini qondirish shartlaridan yaratiladi. Mexanizmlarni loyihalash murakkab vazifa bo'lib, uning echimini ikki bosqichga bo'lish mumkin. Birinchi bosqich Mexanizmlarning sintezi chiqish bo'g'inining zarur shakli va harakat qonunini hamda mexanizmlarning ishlashi uchun umumiy shartlarni ta'minlovchi kinematik sxemani tanlashdan iborat. In ikkinchi bosqich mexanizmning mustahkamligi va ishonchliligini ta'minlash uchun aloqalar va kinematik juftlarning konstruktiv shakllari ishlab chiqilgan. Bizning kursimiz faqat o'z ichiga oladi birinchi bosqich sintez.
Mexanizmning sxemasi, qoida tariqasida, ushbu o'ziga xos shartlarga nisbatan tajriba asosida tanlanadi. Keyin aniqlang sintez parametrlari, ya'ni. zarur traektoriyalarni ta'minlovchi bo'g'inlar uzunligi va nuqtalar koordinatalari va boshqalar, shuningdek qo'shimcha sintez shartlari.
Qo'shimcha sintez shartlariga quyidagilar kiradi krank mavjudligi holati, va yana uzatish holati.
Majburiy uzatish holati
Mashinalarda kuch uzatish sifatini bog'lanishlarning tortishish kuchlari va inersiya kuchlarini hisobga olmasdan aniqlangan bosim burchagi l bilan tavsiflash odatiy holdir.
bosim burchagi l hisoblanadi harakatlanuvchi bo'g'inning unga qo'shni bo'lgan tomondan harakatlanuvchi zvenoga ta'sir etuvchi kuch vektori va bu kuchni qo'llash nuqtasining mutlaq tezligi vektori orasidagi o'tkir burchak.
Harakatni uzatish burchagi γ 90 ° gacha bo'lgan bosim burchagini to'ldiradi:
γ = 90° - l .
Metrik sintez bosqichida bosimning ruxsat etilgan maksimal burchaklari [l max] va harakatning uzatilishi [g min] cheklangan, qoida tariqasida, ularni hisobga olgan holda:
[l max ] ≤ 30° va [g min ] ≥ 60° chiziqli boshqariladigan rishta uchun va
[l max ] ≤ 40°...45° va [g min ] ≥ 50°...45° aylanuvchi qoʻzgʻaluvchan rishta uchun.
Harakatlanish momentlari ta'sirida muvozanatda bo'lgan mentli to'rt bo'g'inda kuchlarning o'tkazilishi shartini ko'rib chiqing. M D va qarshilik momenti M C (3.1-rasm). Bosim burchagi l foydali tortish kuchi o'rtasidagi nisbatni tavsiflaydi F 23 cos l qarshilik momentini yengish M Bilan, va kuch bilan F 23 ga teng
F 23 = M dan /( l quyosh cos l).
3.1-rasm. Menteşali to'rt barda bosimning l burchagi
Bosim burchagi ortishi bilan ko'proq kuch qo'llanilishi kerak F 23 bir xil qarshilik momentini yengish uchun. Bu kinematik juftliklarda reaktsiyalarning kuchayishiga va mexanizm samaradorligining pasayishiga olib keladi.
Mexanizm harakatlanayotganda bosim burchagi o'zgaradi. Menteşali to'rtta bo'g'indagi bu burchak tirgak paytida pozitsiyalarda ekstremal qiymatlarga etadi O.A raf bilan bir qatorda joylashgan OS(3.2-rasm).

3.2-rasm. Bosim burchaklari etib boradigan mexanizmning pozitsiyalari
ekstremal qadriyatlar
Krank-slayder mexanizmida bosim burchagi 2-rasmda ko'rsatilgan pozitsiyalarda ekstremal qiymatlarga ega bo'ladi. 3.3 krank bo'lganda O.A slayderning traektoriyasiga perpendikulyar DA.

Guruch. 3.3. Bosim burchaklaridagi mexanizmning pozitsiyalari
ekstremal qadriyatlarga ega.
Kurs loyihalarida eng ko'p uchraydigan mexanizmlarning kinematik sintezi vazifalari quyida ko'rib chiqiladi.
O'zgarish koeffitsienti bo'yicha menteşeli to'rt bo'g'inning sintezi o'rtacha tezlik va rocker qo'lining ikkita ekstremal pozitsiyasi
Koeffitsient k boshqariladigan zvenoning o'rtacha tezligidagi o'zgarishlar teng k = V C 2 – 1 / V C 1 – 2 ,
qayerda V C 1 – 2 − nuqta o'rtacha chiziq tezligi FROM(3.4-rasm) ish zarbasi paytida, V C 2 – 1 − teskari uchun ham xuddi shunday.
Qabul qiling k> 1, chunki mexanizmlarni loyihalashda, qoida tariqasida, dastlabki holatga qaytish vaqti ish zarbasidan kamroq olinadi, shuning uchun k > 1.
Buni isbotlash oson k= (180° + th) /(180° - th).
Qayerdan th = 180° ( k −1) /(k +1),
qayerda q − birlashtiruvchi novda pozitsiyalari orasidagi burchak Miloddan avvalgi ish jarayonining boshida va oxirida.
Keling, belgi bilan tanishamiz:
l 1 - krank uzunligi AB,(3.4-rasmga qarang); l 2 - birlashtiruvchi novda uzunligi quyosh;
l 3 - rockerning uzunligi CD; l 4 - tayanchlar orasidagi masofa (raf uzunligi LEKIND).

Guruch. 3.4. Berilgan burchaklarning qiymatlariga mos keladigan pozitsiyalarda mexanizm sxemasi ps
ps 1 va ps 2 burchaklari, shuningdek, koeffitsient berilgan k, rockerning ikkita ekstremal pozitsiyasini tasvirlang CD(3.5-rasm).
ball FROM 1 va FROM 2 to'g'ri chiziq bilan bog'lang. Birlashtiruvchi novdaning o'ta pozitsiyalari orasidagi q burchagini hisoblang quyosh. Nuqtada FROM 2 g = 90° burchak hosil qiling −
th, va nuqtadan FROM 1 chiziqqa perpendikulyar pastga tushiring FROM 1 FROM 2 nuqtadan chizilgan chiziq bilan kesishmagacha FROM 2 va g burchak hosil qilish. Biz bu chiziqlarning kesishish nuqtasini belgilaymiz O. Shubhasiz, to'g'ri uchburchakda OFROM 1 FROM 2 burchak FROM 1 OS 2 = th. Uch nuqta O, FROM 1 va FROM 2 doirani tasvirlang. Bir nuqtada cho'qqisi bilan yozilgan burchak O yoyga suyanadi  va th burchagiga, shuningdek, bir xil yoyga asoslangan barcha chizilgan burchaklarga teng. Biz bir nuqtada markazlashtirilgan doirani tanlaymiz O ixtiyoriy nuqta LEKIN va uni nuqtalar bilan tekis segmentlar bilan bog'lang FROM 1 va FROM 2. Natijada, krank tayanchini nuqtaga qo'yish orqali LEKIN, biz ekstremal pozitsiyalarda to'rt bog'lanish mexanizmining diagrammasini olamiz (3.5-rasmga qarang).
va th burchagiga, shuningdek, bir xil yoyga asoslangan barcha chizilgan burchaklarga teng. Biz bir nuqtada markazlashtirilgan doirani tanlaymiz O ixtiyoriy nuqta LEKIN va uni nuqtalar bilan tekis segmentlar bilan bog'lang FROM 1 va FROM 2. Natijada, krank tayanchini nuqtaga qo'yish orqali LEKIN, biz ekstremal pozitsiyalarda to'rt bog'lanish mexanizmining diagrammasini olamiz (3.5-rasmga qarang).

Guruch. 3.5. k koeffitsienti bo'yicha mentli to'rt bo'g'inning sintezi
o'rtacha tezlikdagi o'zgarishlar va rockerning ikkita ekstremal pozitsiyasi
Bu rasmdan kelib chiqadi AC 1 = DA 1 FROM 1 −AB 1 = l 2 − l 1 ; AC 2 = DA 2 FROM 2 −AB 2 = l 2 + l 1 .
Qayerda l 1 = 0,5 (AC 2 −AC 1) m l / 2; l 2 = AC 2 − l 1 .
Stend uzunligi LEKIND = l 4 nuqtaning joylashuvi bilan belgilanadi LEKIN.
Nuqta pozitsiyasidan boshlab LEKIN o'zboshimchalik bilan tanlangan, muammoni hal qilishning ko'p varianti mavjud. Bu sizga qo'shimcha shartlarni kiritish imkonini beradi, masalan, kuchlarni uzatish sharti, koordinata o'qiga nisbatan tayanchlarning joylashuvining eksantrikligi mavjudligi yoki yo'qligi.
Ko'ra roker mexanizmining sintezi koeffitsientik o'zgarishlar
sahna orqasida o'rtacha tezlik
Berilgan: koeffitsient k sayohat tezligidagi o'zgarishlar va nuqtaning ikkita ekstremal holati DA sahna orqasida quyosh.
Roker mexanizmini ikkita ekstremal holatda ko'rib chiqing (3.6-rasm).
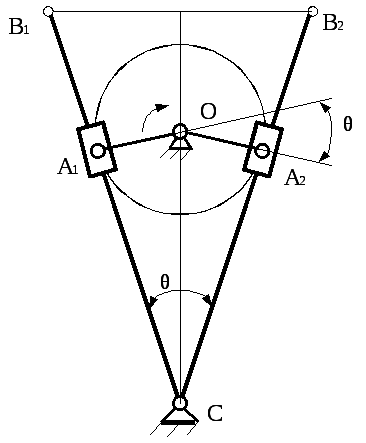
Guruch. 3.6. Roker mexanizmining sintezi
Krank pozitsiyasi orasidagi burchak O.A 2 va krankning holatida davom etishi O.A 1 teng th = 180° ( k −1) /(k+1). burchaklar DA 1 M B 2 va q tomonlari o'zaro perpendikulyar bo'lgan burchaklar kabi bir-biriga teng bo'ladi.
To'g'ri chiziqda DA 1 DA 2 tepada burchakka ega bo'lgan teng yonli uchburchakni quramiz FROM q burchakka teng. q burchakni ixtiyoriy nuqtada yarmiga bo'luvchi to'g'ri chiziqda nuqtani tanlang O uning atrofida krank aylanadi O.A. nuqtadan tushish O chiziqqa perpendikulyar DA 1 FROM(yoki DA 2 FROM), krank uzunligini toping O.A. Olingan roker mexanizmi berilgan shartlarni qondiradi. Berilgan shartlarga ko'ra roker mexanizmining qurilishi quyidagicha. ball DA 1 va DA 2 , kimning pozitsiyasi berilgan bo'lsa, biz to'g'ri chiziq bilan bog'laymiz.
Krank-slayder mexanizmining sintezi
Biz quyidagi konventsiyalarni qabul qilamiz (3.7-rasm):

Guruch. 3.7. Krank-slayder mexanizmining sxemasi
r- krank uzunligi O.A;H- slayderning zarbasi; l- birlashtiruvchi novda uzunligi AB;
e- deaksiyal, ya'ni. nuqta yo'lining siljishi DA eksa atrofidagi slayder Oh ;
L = l/ r- birlashtiruvchi novdaning nisbiy uzunligi;
ν = e/r- nisbiy deaksiyal;
h = H/ r- slayderning nisbiy zarbasi ;
lmax - maksimal bosim burchagi (3.3-rasmga qarang);
k − slayderning o'rtacha tezligini o'zgartirish koeffitsienti (3.1-bandga qarang)
ps 1 va ps 2 - o'tkir burchaklar krank tomonidan hosil qilingan O.A yo'nalishi bilan Oh slayderning ekstremal pozitsiyalarida: ph 1 =  DA 1
Oh, ph 2 = DA 2
Oh
;
DA 1
Oh, ph 2 = DA 2
Oh
;
th \u003d ps 2 - ps 1 - slayderning o'ta pozitsiyalaridagi birlashtiruvchi novdalar orasidagi o'tkir burchak.
Vazifa 1. Berilgan: Yo'q, L = l/ r.
Toping: r; l; l maks.
krank uzunligi O.A: r = H / h. Birlashtiruvchi novda uzunligi AB: l = L r.
Bosim burchagining eng katta qiymati n l max n = arc sin [(1 + n) / L] .
Vazifa 2. Berilgan: H,k, L= l/ r.
Toping: r; l; e; l maks.
Slayderning o'ta pozitsiyalarida birlashtiruvchi novdalar orasidagi o'tkir burchak
th = 180 0 ∙( k–1)/(k+1).
Slayderning nisbiy zarbasini ifodadan topamiz
h = {2∙} 0,5 .
ifodadan nisbiy deaksiyalni topamiz
ν = [( h –2)∙(L 2 –1)] 0,5 .
krank uzunligi r = H/ h; birlashtiruvchi novda uzunligi l = L r; desaksiyal e =ν r.
Bosim burchagining eng katta qiymati l max = arc sin [(1 + n) / L].





