Real physics. See what "Deformation" is in other dictionaries
Under the influence of external forces, solid bodies change their shape and volume, i.e. are deformed.
As a result of the action of forces applied to the body, the particles of which it consists move. The distances between atoms and their mutual arrangement change. This phenomenon is called deformation .
If, after the termination of the force, the body returns to its original shape and volume, then such a deformation is called elastic , or reversible . In this case, the atoms again take the position in which they were before the force began to act on the body.
If we squeeze a rubber ball, it will change shape. But he will immediately restore it as soon as we let him go. This is an example of elastic deformation.
If, as a result of the action of a force, the atoms are displaced from their equilibrium positions by such distances that the interatomic bonds no longer act on them, they cannot return to their original state and occupy new equilibrium positions. In this case, in physical body irreversible changes occur.
Squeeze a piece of plasticine. He will not be able to return to his original form when we stop working on him. It has deformed irreversibly. This deformation is called plastic , or irreversible .
Irreversible deformations can also occur gradually over time if the body is subjected to a constant load, or under the influence of various factors, mechanical stress arises in it. Such deformations are called creep deformations .
For example, when parts and assemblies of some units experience serious mechanical loads during operation, and are also exposed to significant heat, creep deformation is observed in them over time.
Under the influence of the same force, a body can experience elastic deformation if the force is applied to it for a short time. But if the same force acts on the same body for a long time, then the deformation may become irreversible.
The amount of mechanical stress at which the deformation of the body will still be elastic, and the body itself will restore its shape after the load is removed, is called elastic limit . At values above this limit, the body will begin to collapse. But destroying a solid body is not so easy. It resists. And this property is called strength .
When two vehicles connected by a tow cable start moving, the cable is deformed. It stretches, and its length increases. And when they stop, the tension is released, and the length of the cable is restored. But if the cable is not strong enough, it will simply break.
Types of deformation
Depending on how the external force is applied, there are tensile-compressive deformations, shear, bending, torsion.
Tensile-compressive deformation
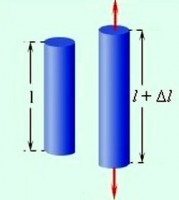
Tensile-compressive deformation caused by forces that are applied to the ends of the beam parallel to its longitudinal axis and directed in different directions.
Under the influence of external forces, particles solid matter, oscillating about their equilibrium position, are displaced. But they try to interfere with this process internal forces interactions between particles, trying to keep them in their original position at a certain distance from each other. Forces that prevent deformation are called elastic forces .
Tensile deformation is experienced by a stretched bowstring, a towing cable of a car during towing, coupling devices of railway cars, etc.
When we climb stairs, the steps are deformed by our gravity. This is a compression strain. The same deformation is experienced by the foundations of buildings, columns, walls, a pole with which an athlete jumps.
Shear deformation
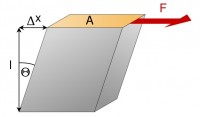
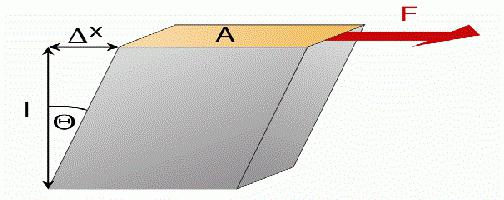
If an external force is applied tangentially to the surface of the bar, the lower part of which is fixed, then shear strain . In this case, the parallel layers of the body seem to shift relative to each other.
Imagine a rickety stool on the floor. We apply a force to it tangentially to its surface, that is, we simply pull the upper part of the stool towards ourselves. All its planes parallel to the floor will shift relative to each other by the same angle.
The same deformation occurs when a sheet of paper is cut with scissors, a wooden beam is sawn with a saw with sharp teeth, etc. All fasteners connecting the surfaces - screws, nuts, etc. - undergo shear deformations.
bending deformation
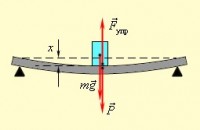
Such a deformation occurs if the ends of a beam or rod lie on two supports. In this case, it is subjected to loads perpendicular to its longitudinal axis.
Bending deformation is experienced by all horizontal surfaces laid on vertical supports. The simplest example is a ruler lying on two books of the same thickness. When we put something heavy on top of it, it will bend. In the same way, a wooden bridge thrown over a stream sags when we walk along it.
Torsional deformation
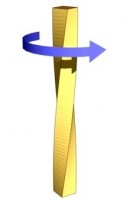
Torsion occurs in a body when a couple of forces are applied to its cross section. In this case, the cross sections will rotate around the axis of the body and relative to each other. Such deformation is observed in the rotating shafts of machines. If you manually wring out (twist out) wet laundry, it will also be subjected to torsion deformation.
Hooke's Law

Observations of various types of deformation showed that the amount of deformation of the body depends on the mechanical stress arising under the action of forces applied to the body.
This dependence is described by a law discovered in 1660. English scientist Robert Hooke , who is called one of the fathers of experimental physics.
It is convenient to consider the types of deformation on the beam model. This is a body, one of the three dimensions of which (width, height or length) is much larger than the other two. Sometimes instead of the term "beam" the term "rod" is used. The length of the rod is much greater than its width and height.
Let us consider this dependence for tensile-compressive deformation.
Let us assume that the rod initially has a length L . Under the action of external forces, its length will change by the value ∆l . It is called absolute elongation (compression) of the rod .
For tensile-compressive deformation, Hooke's law has the form:
F - the force that compresses or stretches the rod; k - coefficient of elasticity.
The elastic force is directly proportional to the elongation of the body up to a certain limit value.
E - modulus of elasticity of the first kind, or Young's modulus . Its value depends on the properties of the material. This is a theoretical value introduced to characterize the elastic properties of bodies.
S - cross-sectional area of the rod.
The ratio of absolute elongation to the original length of the rod is called elongation or relative deformation .
When stretched, its value is positive, and when compressed, it is negative.
Module relation external force to the cross-sectional area of the rod is called mechanical stress .
Then Hooke's law for relative values will look like this:
Voltage σ directly proportional to relative strain ε .
It is assumed that the force tending to lengthen the rod is positive ( F˃0 ), and the force shortening it has a negative value ( F ˂ 0 ).
Deformation measurement

When designing and operating various mechanisms, technical objects, buildings, bridges and other engineering structures, it is very important to know the magnitude of the deformation of materials.
Since elastic deformations are small, the measurements must be carried out with very high accuracy. For this purpose, devices called strain gauges .
The strain gauge consists of a strain gauge and indicators. It may also include a recording device.
Depending on the principle of operation, strain gauges are optical, pneumatic, acoustic, electrical and X-ray.
Optical strain gauges are based on measuring the deformation of a fiber optic thread glued to the object of study. Pneumatic strain gauges record the change in pressure during deformation. In acoustic strain gauges, piezoelectric sensors are used to measure the values by which the speed of sound and acoustic damping change during deformation. Electrical strain gauges calculate strain based on changes electrical resistance. X-ray determine the change in interatomic distances in the crystal lattice of the studied metals.
Until the 1980s, sensor signals were recorded by recorders on ordinary paper tape. But when computers appeared and began to develop rapidly modern technologies, it became possible to observe deformations on monitor screens and even give control signals that allow changing the mode of operation of the tested objects.
A person begins to face the process of deformation from the first days of his life. It allows us to feel touch. Plasticine can be recalled as a vivid example of deformation from childhood. Exist different types deformations. Physics considers and studies each of them. To begin with, we introduce the definition of the process itself, and then gradually consider the possible classifications and types of deformation that can occur in solid objects.
Definition
Deformation is the process of movement of particles and elements of the body relative to their relative position in the body. Simply put, this is a physical change in the external forms of an object. There are the following types of deformation:
- shift;
- torsion;
- bend;
Like any other physical quantity, deformation can be measured. In the simplest case, the following formula is used:
e \u003d (p 2 -p 1) / p 1,
where e is the simplest elementary deformation (increase or decrease in body length); p 2 and p 1 - body length after and before deformation, respectively.

Classification
In the general case, the following types of deformation can be distinguished: elastic and inelastic. Elastic, or reversible, deformations disappear after the force acting on them disappears. The basis of this physical law is used in strength training equipment, for example, in an expander. If we talk about the physical component, then it is based on the reversible displacement of atoms - they do not go beyond the interaction and the framework of interatomic bonds.
Inelastic (irreversible) deformations, as you understand, are the opposite process. Any force that is applied to the body leaves marks/deformation. This type of impact also includes the deformation of metals. With this type of shape change, other properties of the material can often change as well. For example, the deformation caused by cooling may increase the strength of the product.
Shift
As already mentioned, there are different types of deformation. They are divided according to the nature of the change in the shape of the body. In mechanics, shear is such a change in shape in which the lower part of the beam is fixed, and the force is applied tangentially to the upper surface. The relative shear strain is determined by the following formula:
where X 12 is the absolute shift of the layers of the body (that is, the distance by which the layer has shifted); B is the distance between the fixed base and the parallel shear layer.
Torsion
If the types of mechanical deformations were divided according to the complexity of the calculations, then this one would take the first place. This type of change in the shape of a body occurs when two forces act on it. In this case, the displacement of any point of the body occurs perpendicular to the axis of the acting forces. Speaking of this type of deformation, the following quantities to be calculated should be mentioned:
- Φ is the angle of twist of the cylindrical rod.
- T is the moment of action.
- L is the length of the rod.
- G is the moment of inertia.
- W - shear modulus.
The formula looks like this:
F \u003d (T * L) / (G * W).
Another quantity that needs to be calculated is the relative twist angle:
Q=F/L (values are taken from the previous formula).
bend
This is a type of deformation that occurs when the position and shape of the beam axes change. It is also divided into two types - oblique and straight. Direct bending is a type of deformation in which acting force falls directly on the axis of the beam in question, in any other case we are talking about an oblique bend.
Tension-compression
Different kinds deformations, the physics of which is sufficiently well studied, are rarely used to solve various problems. However, when teaching at school, one of them is often used to determine the level of knowledge of students. In addition to this name, this type of deformation also has another one that sounds like this: a linear stress state.
Tension (compression) occurs when a force acting on an object passes through its center of mass. If we talk about a visual example, then tension leads to an increase in the length of the rod (sometimes to breaks), and compression leads to a decrease in length and the appearance of longitudinal bends. The stress caused by this type of deformation is directly proportional to the force acting on the body, and inversely proportional to the cross-sectional area of the beam.
Hooke's Law
The basic law considered in the deformation of the body. According to him, the deformation that occurs in the body is directly proportional to the acting force. The only caveat is that it is applicable only at small values of the deformation, since at large values and exceeding the proportionality limit, this relationship becomes non-linear. In the simplest case (for a thin tensile bar), Hooke's law has the following form:
where F is the applied force; k - coefficient of elasticity; L is the change in the length of the beam.
If everything is clear with two values, then the coefficient (k) depends on several factors, such as the material of the product and its dimensions. Its value can also be calculated using the following formula:
where E is Young's modulus; C - cross-sectional area; L is the length of the beam.
conclusions
In fact, there are many ways to calculate the deformation of an object. Different types of deformation use different coefficients. The types of deformation differ not only in the form of the result, but also in the forces acting on the object, and for calculations you will need remarkable efforts and knowledge in the field of physics. We hope that this article will help you understand the basic laws of physics, and also allow you to move a little further in the study of this.
DEFINITION
Deformations any changes in the shape, size and volume of the body are called. Deformation determines final result movement of body parts relative to each other.
DEFINITION
Elastic deformations are called deformations that completely disappear after the removal of external forces.
Plastic deformations are called deformations that are fully or partially preserved after the cessation of the action of external forces.
The ability to elastic and plastic deformation depends on the nature of the substance of which the body consists, the conditions in which it is located; ways of making it. For example, if you take different grades of iron or steel, then you can find completely different elastic and plastic properties in them. At ordinary room temperatures, iron is a very soft, ductile material; hardened steel, on the other hand, is a hard, resilient material. The plasticity of many materials is a condition for their processing, for the manufacture of the necessary parts from them. Therefore, it is considered one of the most important technical properties of a solid.
When a solid body is deformed, particles (atoms, molecules, or ions) are displaced from their original equilibrium positions to new positions. At the same time, they change force interactions between the individual particles of the body. As a result, internal forces arise in the deformed body that prevent its deformation.
There are tensile (compression), shear, bending, and torsion strains.
elastic forces
DEFINITION
elastic forces are the forces that arise in the body during its elastic deformation and are directed in the direction opposite to the displacement of particles during deformation.
Elastic forces are of electromagnetic nature. They prevent deformations and are directed perpendicular to the contact surface of the interacting bodies, and if such bodies as springs and threads interact, then the elastic forces are directed along their axis.
The elastic force acting on the body from the side of the support is often called the reaction force of the support.
DEFINITION
Tensile deformation (linear deformation)- this is a deformation in which only one linear dimension of the body changes. Her quantitative characteristics are absolute and relative elongation.
Absolute elongation:
where and are the lengths of the body in the deformed and undeformed states, respectively.
Relative extension:
Hooke's Law
Small and short-term deformations with a sufficient degree of accuracy can be considered as elastic. For such deformations, Hooke's law is valid:
where the projection of the force on the axis is the rigidity of the body, depending on the dimensions of the body and the material from which it is made, the unit of stiffness in the SI system N/m.
Examples of problem solving
EXAMPLE 1
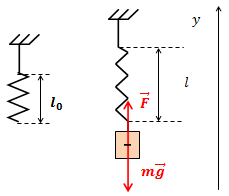
| Exercise | A spring with a stiffness of N / m in an unloaded state has a length of 25 cm. What will be the length of the spring if a load of 2 kg is suspended from it? |
| Solution | Let's make a drawing.
An elastic force also acts on a load suspended on a spring. Projecting this vector equality onto the coordinate axis, we get: According to Hooke's law, the elastic force is: so you can write: whence the length of the deformed spring: Let's convert to the SI system the value of the length of the undeformed spring cm m. |
In solids - amorphous and crystalline - particles (molecules, atoms, ions) perform thermal vibrations around equilibrium positions in which the energy of their interaction is minimal. When the distance between the particles increases, attractive forces arise, and when the distance decreases, repulsive forces arise. Interaction forces between particles determine the mechanical properties of solids.
Deformation rigid body is the result of change under the action of external forces relative position the particles that make up the body, and the distances between them.
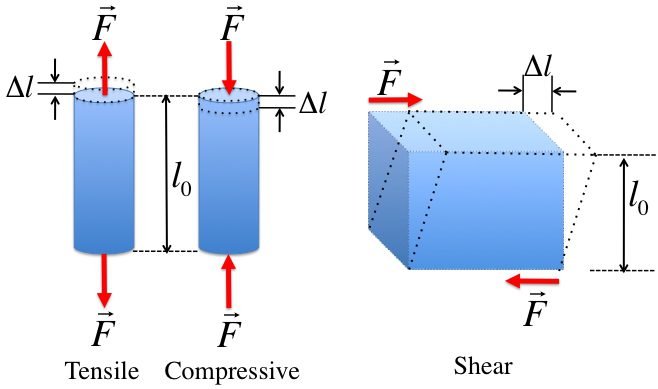
There are several types of deformations of solids. Some of them are shown in Fig. 3.7.1.
The simplest type of deformation is tensile or compressive deformation. It can be characterized by absolute elongation Δ l, arising under the action of an external force Relationship between Δ l and F depends not only on the mechanical properties of the substance, but also on the geometric dimensions of the body (its thickness and length).
Absolute elongation ratio Δ l to original length l sample is called elongation or relative deformationε:
The unit of mechanical stress in SI is taken pascal(Pa). Mechanical stress is measured in units of pressure.
The relationship between ε and σ is one of the most important characteristics of the mechanical properties of solids. Graphic image this dependency is called stretch diagram . The relative elongation ε is plotted along the abscissa axis, and the mechanical stress σ is plotted along the ordinate axis. A typical example of a strain diagram for metals (such as copper or soft iron) is shown in fig. 3.7.2.
At small strains (usually significantly less than 1%), the relationship between σ and ε turns out to be linear (section Oha on the diagram). In this case, when the stress is removed, the deformation disappears. Such a deformation is called elastic. The maximum value σ \u003d σ pr, at which a linear relationship between σ and ε is preserved, is called limit of proportionality(dot a). On the linear section, Hooke's law :
Coefficient E in this ratio is called Young's modulus.
With a further increase in stress, the relationship between σ and ε becomes nonlinear (section ab). However, when the stress is removed, the deformation almost completely disappears, i.e., the dimensions of the body are restored. The maximum voltage in this section is called elastic limit .
If σ > σ control, the sample, after the stress is removed, no longer restores its original dimensions and the body retains permanent deformation ε rest. Such deformations are called plastic(sections bc, cd and de). Location on bc deformation occurs almost without an increase in stress. This phenomenon is called fluidity material. At the point d the maximum stress σ max is reached, which the material is able to withstand without destruction ( tensile strength ). At the point e material is destroyed.
Materials in which the tensile diagram has the form shown in fig. 3.7.2 are called plastic. For such materials, usually the deformation ε max at which fracture occurs is ten times greater than the width of the elastic deformation region. These materials include many metals.
Materials in which failure occurs at deformations only slightly exceeding the region of elastic deformations are called fragile(glass, porcelain, cast iron).
Shear deformation also obeys similar patterns (Fig. 3.7.1 (2)). In this case, the force vector is directed tangentially to the sample surface. The relative strain is determined by the dimensionless ratio Δ x / l, and the voltage is the ratio F / S(force acting per unit surface area). For small deformations
G in this respect is called shear modulus . The shear modulus for most solid materials is 2-3 times less than Young's modulus. For example, copper E\u003d 1.1 10 11 N / m 2, G\u003d 0.42 10 11 N / m 2. It should be remembered that for liquid and gaseous substances, the shear modulus is zero.
On fig. 3.7.1 (3) deformation is shown all-round compression a solid body immersed in a liquid. In this case, the mechanical stress coincides with the pressure p in liquid. Relative strain is defined as the ratio of volume change Δ V to original volume V body. For small deformations
Proportionality factor B in this formula is called all-round compression module .
All-round compression can be subjected not only to solids, but also to liquids and gases. By the water B\u003d 2.2 10 9 N / m 2, for steel B\u003d 1.6 10 11 N / m 2. At the bottom of the Pacific Ocean, at a depth of about 4 km, pressure p approximately equal to 4·10 7 N/m 2 . Under these conditions, the relative change Δ V / V the volume of water is 1.8%, while for a steel body it is only 0.025%, i.e. 70 times less. Solids with their rigid crystal lattice are much less compressible compared to liquids, whose atoms and molecules are not so strongly associated with their neighbors. The compressibility of gases is many orders of magnitude higher than that of liquids and solids.
The value of the modulus of all-round compression determines sound speed in this substance





