State of static equilibrium. Types of balance
The main sign of the interaction of bodies in dynamics is the occurrence of accelerations. However, it is often necessary to know under what conditions a body, which is acted upon by several different forces, does not move with acceleration. Let's hang
ball on a string. The force of gravity acts on the ball, but does not cause accelerated motion towards the Earth. This is prevented by the action of an elastic force equal in absolute value and directed in the opposite direction. The force of gravity and the force of elasticity balance each other, their resultant is zero, therefore the acceleration of the ball is also zero (Fig. 40).
The point through which the resultant of gravity passes at any location of the body is called the center of gravity (Fig. 41).
The section of mechanics that studies the conditions for the balance of forces is called statics.
Equilibrium of non-rotating bodies.
Uniform rectilinear forward movement body or its rest is possible only if the geometric sum of all forces applied to the body is equal to zero.
A non-rotating body is in equilibrium if the geometric sum of the forces applied to the body is zero.
Equilibrium of bodies having an axis of rotation.
AT Everyday life and technology, there are often bodies that cannot move forward, but can rotate around an axis. Examples of such bodies are doors and windows, car wheels, swings, etc. If the force vector P lies on a straight line that intersects the axis of rotation, then this force is balanced by the elastic force from the side of the axis of rotation (Fig. 42).
If the straight line on which the force vector F lies does not intersect the axis of rotation, then this force cannot be balanced


elastic force from the side of the axis of rotation, and the body rotates around the axis (Fig. 43).
The rotation of a body around an axis under the action of one force can be stopped by the action of a second force. Experience shows that if two forces separately cause the body to rotate in opposite directions, then when they act simultaneously, the body is in equilibrium if the following condition is met:
where are the shortest distances from the straight lines on which the force vectors (lines of action of forces) lie to the axis of rotation (Fig. 44). The distance is called the arm of the force, and the product of the modulus of force and the arm is called the moment of force M:
If a positive sign is assigned to the moments of forces that cause the body to rotate around an axis clockwise, and a negative sign to the moments of forces that cause counterclockwise rotation, then the equilibrium condition for a body with an axis of rotation can be formulated as a rule of moments: a body having a fixed axis of rotation is in equilibrium if the algebraic sum of the moments of all forces applied to the body about this axis is equal to zero:
The SI unit of torque is a moment of force of 1 N, the line of action of which is at a distance from the axis of rotation. This unit is called the newton meter.
The general condition for the equilibrium of a body. Combining the two conclusions, we can formulate a general equilibrium condition for a body: a body is in equilibrium if the geometric sum of the vectors of all forces applied to it and the algebraic sum of the moments of these forces about the axis of rotation are equal to zero.
When the general equilibrium condition is met, the body is not necessarily at rest. According to Newton's second law, when the resultant of all forces is equal to zero, the acceleration of the body is equal to zero and it can be at rest or? move evenly and in a straight line.
The equality to zero of the algebraic sum of the moments of forces also does not mean that in this case the body is necessarily at rest. For several billion years, the rotation of the Earth around its axis continues with a constant period precisely because the algebraic sum of the moments of forces acting on the Earth from other bodies is very small. For the same reason, a spinning bicycle wheel continues to rotate at a constant frequency, and only external forces stop this rotation.
Types of balance.
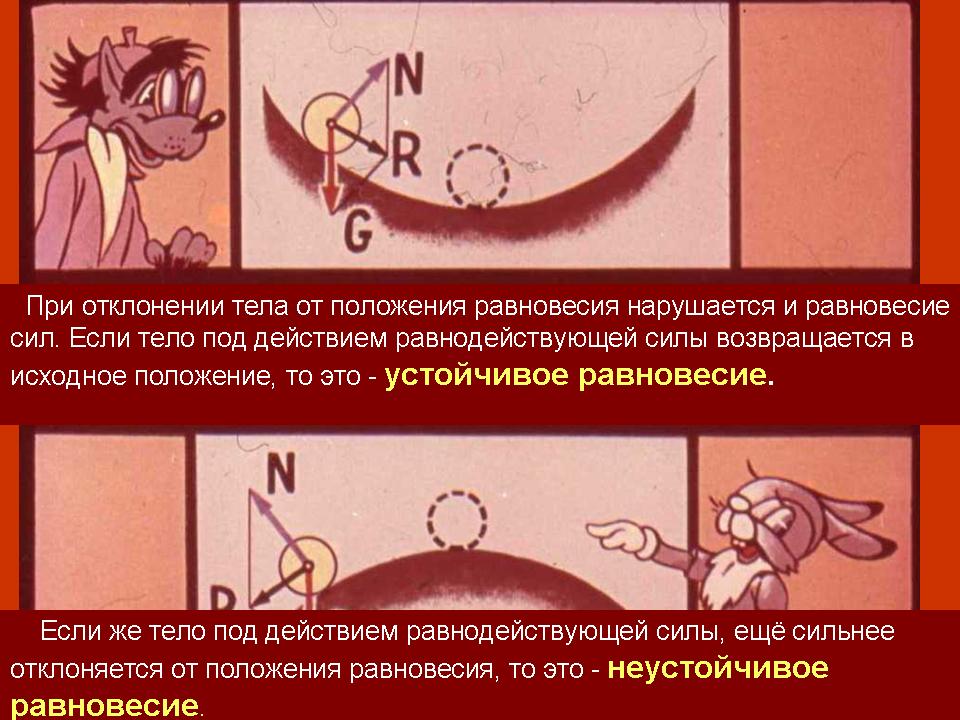
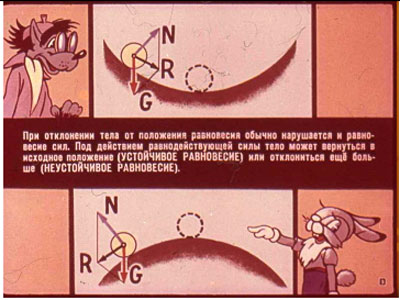
In practice, an important role is played not only by the fulfillment of the equilibrium condition for bodies, but also by the qualitative characteristic of equilibrium, called stability. There are three types of balance of bodies: stable, unstable and indifferent.
The equilibrium is called stable if, after small external influences, the body returns to its original state of equilibrium. This occurs if, with a slight displacement of the body in any direction from the initial position, the resultant of the forces acting on the body becomes non-zero and is directed towards the equilibrium position. In stable equilibrium is, for example, a ball at the bottom of the recess (Fig. 45).
Equilibrium is called unstable if, with a slight displacement of the body from the equilibrium position, the resultant of the forces applied to it is non-zero and is directed from the equilibrium position (Fig. 46).
If, for small displacements of the body from its original position, the resultant of the forces applied to the body remains equal to zero, then the body is in a state of indifferent equilibrium. The ball is in indifferent equilibrium on a horizontal surface (Fig. 47).


A body with a fixed axis of rotation is in stable equilibrium if its center of gravity is located below the axis of rotation and is located on a vertical line passing through the axis of rotation (Fig. 48, a).
With a slight deviation from this equilibrium position, the algebraic sum of the moments of forces acting on the body becomes non-zero and the resulting moment of forces turns the body to its original equilibrium position (Fig. 48, b).
If the center of gravity is on a vertical line passing through the axis of rotation, but located above the axis of rotation, then the equilibrium is unstable (Fig. 49, a, b).

The body is in indifferent equilibrium when the axis of rotation of the body passes through its center of gravity (Fig. 50).
Body balance on a support.
If a vertical line drawn through the center of gravity C of the body crosses the support area, then the body is in equilibrium (Fig. 51). If the vertical line drawn through the center of gravity does not cross the area of support, then the body overturns (Fig. 52).

















![]()





 Back forward
Back forward
Attention! The slide preview is for informational purposes only and may not represent the full extent of the presentation. If you are interested this work please download the full version.
Lesson Objectives: To study the state of equilibrium of bodies, to get acquainted with various types balance; find out the conditions under which the body is in equilibrium.
Lesson objectives:
- Training: To study two conditions of equilibrium, types of equilibrium (stable, unstable, indifferent). Find out under what conditions bodies are more stable.
- Developing: To promote the development of cognitive interest in physics. Development of skills to compare, generalize, highlight the main thing, draw conclusions.
- Educational: To cultivate attention, the ability to express one's point of view and defend it, to develop the communication skills of students.
Lesson type: lesson learning new material with computer support.
Equipment:
- Disk "Work and power" from "Electronic lessons and tests.
- Table "Equilibrium conditions".
- Prism inclined with a plumb line.
- Geometric bodies: cylinder, cube, cone, etc.
- Computer, multimedia projector, interactive whiteboard or screen.
- Presentation.
During the classes
Today in the lesson we will learn why the crane does not fall, why the Roly-Vstanka toy always returns to its original state, why the Leaning Tower of Pisa does not fall?
I. Repetition and updating of knowledge.
- Formulate Newton's first law. What is the status of the law?
- What question does Newton's second law answer? Formula and wording.
- What question does Newton's third law answer? Formula and wording.
- What is the resultant force? How is she?
- From the disk “Movement and interaction of bodies”, complete task No. 9 “The resultant of forces with different directions” (the rule of vector addition (2, 3 exercises)).
II. Learning new material.
1. What is called equilibrium?
Equilibrium is a state of rest.
2. Equilibrium conditions.(slide 2)
a) When is the body at rest? What law does this come from?
The first equilibrium condition: The body is in equilibrium if the geometric sum external forces applied to the body is zero. ∑ F = 0
b) Let two equal forces, as it shown on the picture.

Will she be in balance? (No, she will turn)
Only the central point is at rest, while the others move. This means that for the body to be in equilibrium, it is necessary that the sum of all forces acting on each element be equal to 0.
The second equilibrium condition: The sum of the moments of forces acting clockwise must be equal to the sum of the moments of forces acting counterclockwise.
∑ M clockwise = ∑ M counterclockwise
Moment of force: M = F L
L - shoulder of force - the shortest distance from the fulcrum to the line of action of the force.
3. The center of gravity of the body and its location.(slide 4)
Center of gravity of the body is the point through which the resultant of all parallel forces gravity acting on individual elements of the body (at any position of the body in space).
Find the center of gravity of the following figures:

4. Types of balance.
a) (slides 5-8)
Conclusion: Equilibrium is stable if, with a small deviation from the equilibrium position, there is a force tending to return it to this position.
The position in which its potential energy is minimal is stable. (slide 9)
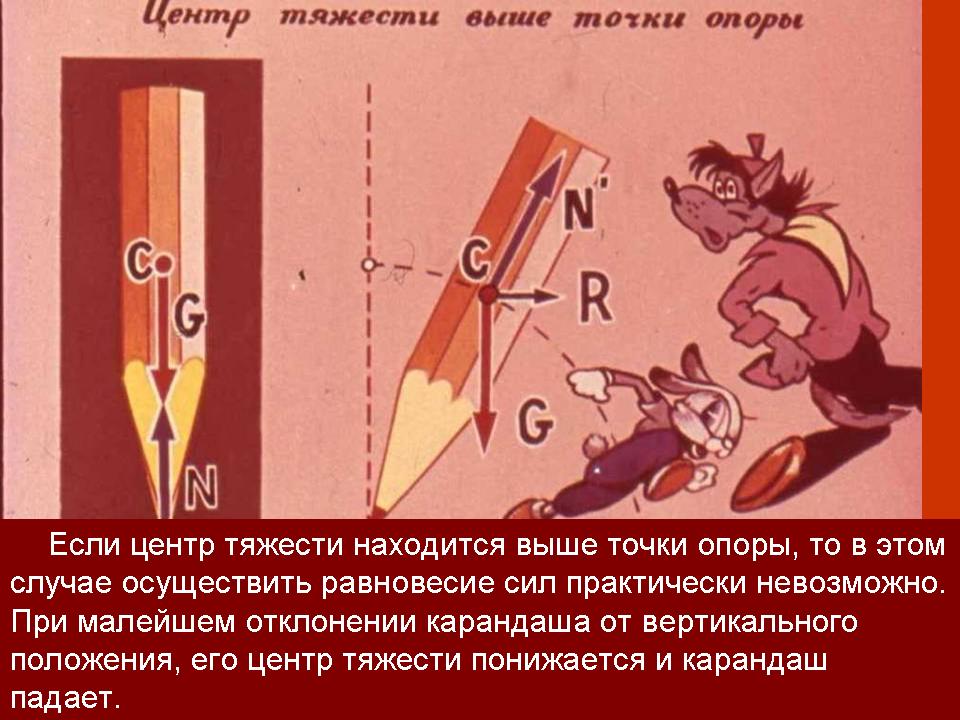
b) The stability of bodies located on the fulcrum or on the fulcrum.(slides 10-17)

Conclusion: For the stability of a body located on one point or line of support, it is necessary that the center of gravity be below the point (line) of support.
c) The stability of bodies on a flat surface.
(slide 18)
1) Support surface- this is not always a surface that is in contact with the body (but one that is limited by lines connecting the legs of the table, tripod)

2) Analysis of a slide from "Electronic lessons and tests", disk "Work and power", lesson "Types of balance".
Picture 1.
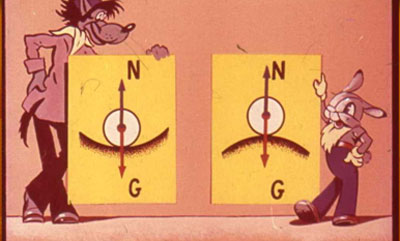
- How are the stools different? (Square footing)
- Which one is more stable? (with larger area)
- How are the stools different? (Location of the center of gravity)
- Which one is the most stable? (which center of gravity is lower)
- Why? (Because it can be deflected to a larger angle without tipping over)
3) Experience with a deviating prism
- Let's put a prism with a plumb line on the board and begin to gradually lift it over one edge. What do we see?
- As long as the plumb line crosses the surface bounded by the support, the balance is maintained. But as soon as the vertical passing through the center of gravity begins to go beyond the boundaries of the support surface, the bookcase overturns.
Parsing slides 19–22.
![]()
Conclusions:
- The body with the largest area of support is stable.
- Of two bodies of the same area, the body whose center of gravity is lower is stable, because it can be deflected without overturning at a large angle.
Parsing slides 23–25.

Which ships are the most stable? Why? (For which the cargo is located in the holds, and not on the deck)

What cars are the most stable? Why? (To increase the stability of cars on turns, the roadbed is tilted in the direction of the turn.)
Conclusions: Equilibrium can be stable, unstable, indifferent. The stability of the bodies is greater, the larger the area of support and the lower the center of gravity.
III. Application of knowledge about the stability of bodies.
- What specialties most need knowledge about the balance of bodies?
- Designers and constructors of various structures (high-rise buildings, bridges, TV towers etc.)
- Circus artists.
- Drivers and other professionals.
(slides 28–30)
- Why does Roly-Vstanka return to the equilibrium position at any inclination of the toy?
- Why is the Leaning Tower of Pisa tilted and not falling?
- How do cyclists and motorcyclists keep their balance?
Lesson takeaways:
- There are three types of equilibrium: stable, unstable, indifferent.
- The position of the body is stable, in which its potential energy is minimal.
- The stability of bodies on a flat surface is greater, the larger the area of support and the lower the center of gravity.
Homework: § 54 – 56 (G.Ya. Myakishev, B.B. Bukhovtsev, N.N. Sotsky)
Used sources and literature:
- G.Ya. Myakishev, B.B. Bukhovtsev, N.N. Sotsky. Physics. Grade 10.
- Filmstrip "Stability" 1976 (scanned by me on a film scanner).
- Disk "Movement and interaction of bodies" from "Electronic lessons and tests".
- Disk "Work and power" from "Electronic lessons and tests".
Type of balance solid body determined by the action of gravity in the case of an arbitrarily small deviation: a) indifferent equilibrium - the action of gravity does not change; b) stable - it always returns the body to its previous position (there is a moment of stability); c) unstable - the action of gravity always causes the body to overturn (there is a moment of overturning); d) limited-stable - before the potential barrier, the position of the body is restored (a moment of stability occurs), after it the body overturns (a moment of overturning occurs).
In rigid body mechanics, there are three types of equilibrium : indifferent, stable and unstable. These species differ in the behavior of the body, slightly deviated from the balanced position. When a person's body completely maintains a pose ("hardening"), the laws of equilibrium of a rigid body apply to it.
Indifferent balance It is characteristic that, with any deviations, equilibrium is maintained. A ball, a cylinder, a circular cone on a horizontal plane (lower support) can be rotated as you like, and they will remain at rest. . Line of action of gravity (G) in such a body (or, as they say, the line of gravity is shorter) always passes through the fulcrum, coincides with the line of action of the support reaction force (R); they balance each other. In sports technology, indifferent balance is practically never found either on land or in water.
sustainable balance characterized by a return to the previous position with any deviation. It is stable with an arbitrarily small deviation for two reasons; a) the center of gravity of the body rises higher (Dh), a reserve is created potential energy in the field of gravity; b) line of gravity (G) does not pass through the support, the arm of gravity appears (d) and the moment of gravity arises (the moment of stability M mouth = Gd), returning the body (with a decrease in potential energy) to its previous position. Such an equilibrium is found in a person with an upper support. For example, a gymnast in hanging on the rings; arm hanging freely at the shoulder joint. The force of gravity of the body itself returns the body to its previous position.
Unstable equilibrium It is characteristic that an arbitrarily small deviation causes an even greater deviation and the body itself cannot return to its previous position. This is the situation with bottom support when the body has a point or line (body edge) of support. When the body deviates: a) the center of gravity falls below (-Dh), the potential energy decreases in the earth's gravitational field; b) line of gravity (G) with body deviation moves away from the fulcrum, the shoulder increases (d) and the moment of gravity (overturning moment M def. =Gd ); it further and further deviates the body from its previous position. Unstable equilibrium in nature is practically almost impossible.
In physical exercises, another type of balance is most often encountered when there is a support area located below (lower support) . With a slight deviation of the body, its center of gravity rises (+ Dh) and a moment of stability appears (M mouth =Gd). There are signs of a stable equilibrium; the moment of gravity of the body will return it to its previous position. But this continues only when deviated to certain limits, until the line of gravity reaches the edge of the support area. In this position, conditions of unstable equilibrium already arise: with further deviation, the body overturns; at the slightest deviation in the opposite direction, it returns to its previous position. The boundary of the support area corresponds to the top of the "potential barrier" (maximum potential energy). Within the limits between opposite barriers ("potential hole") in all directions, bounded-stable equilibrium .
2.4. Stability of a rigid body and body systems
The stability of an object is characterized by its ability, counteracting the imbalance, to maintain position. Distinguish between static indicators of stability as the ability to resist imbalance and dynamic as the ability to restore balance.
Static sustainability indicator a rigid body serves (in a bounded-stable equilibrium) stability factor . On fig. 51, a the overturning moment is created by the overturning force (F ODA) applied on the shoulder (h) relative to the tipping line (O), around which the body is deflected. The moment of stability relative to the same overturning line arises from the beginning of the application of the force F def. It becomes greatest at the beginning of overturning (limiting moment of stability), then the arm of gravity G decreases and the moment of stability decreases to zero (in the boundary position - BCT above the overturning line).
a- coefficient of stability of the body; b, c - stability angle (a);d- static and dynamic stability of the system of bodies; d - bearing surface (dashed line) and effective bearing area (shaded) (original)
The stability coefficient is equal to the ratio of the limiting stability moment to the overturning moment. When the stability coefficient of a body at rest is equal to or greater than one, there is no overturning. If it is less than one, the equilibrium cannot be maintained.
However, the resistance of only these two mechanical factors (two moments of forces) for body systems, if it can change the configuration does not exhaust the real picture. Suppose that the resisting wrestler (Fig. 51, d), bending his legs, lowers the center of gravity of his body strictly vertically. From this, neither the force of gravity of his body, nor its shoulder, and hence the moment of stability will not change. But the point of application F onp will decrease, the shoulder of this force will decrease, its moment will become smaller. In this way, the wrestler can increase his body's stability factor by reducing the overturning moment. By tilting the body back, he will not change the overturning moment, but will increase the shoulder of the gravity of his body and the moment of stability. Here he also wins in static stability. The wrestler, tensing his muscles and resting against the carpet, creates another external horizontal force (friction force) directed towards him, thereby reducing the effect of the overturning thrust. The latter also depends on the readiness of the wrestler's muscles to counteract its sudden application. Fraudulent actions can drastically worsen their readiness and cause a rollover with low thrust. The most essential thing for a biomechanical system is not the passive use of the body's gravity, but active muscle pulls that maintain and change the body's posture. In the body system, each link must be in balance, maintaining its configuration (the posture of the human body).
Consequently, the coefficient of stability of a body and a fixed system of bodies characterizes static stability as the ability to resist imbalance. In humans, when determining stability, one must always take into account the active opposition of muscle pulls and readiness for resistance.
Dynamic indicator of stability solid body serves stability angle . This is the angle formed by the line of action of gravity and the straight line connecting the center of gravity with the corresponding edge of the support area. (see fig. 51, b, c). We begin to deflect the body until the line of gravity reaches the boundary of the support area (the boundary position of the body is the top of the potential barrier). At the body, placed upright (Fig. 51, b), basis of sustainability(/i) is less than that of the same body lying flat (/2) (see Fig. 51, in). This means that the line of gravity is closer to the boundary beyond which the rollover will begin. The center of gravity must be raised to roll over in the first case to a lower height (Dh 1) than in the second (Dh 2). The stability angle in the first case (a 1) is clearly less than in the second (a 2).
physical meaning stability angle is that it is equal to the angle of rotation (<р), на который надо повернуть тело для начала его опрокидывания. Угол устойчивости показывает, в каких пределах еще восстанавливается равновесие. Он характеризует степень динамической устойчивости: если угол больше, то и устойчивость больше. Этот показатель удобен для сравнения степени устойчивости одного тела в разных направлениях (если площадь опоры не круг и линия силы тяжести не проходит через его центр).
The sum of two stability angles in one plane is considered as equilibrium angle in this plane. It characterizes the stability margin in a given plane, that is, it determines the range of movement of the center of gravity until a possible tipping over in one direction or another (for example, for a slalomist when skiing, a gymnast on a balance beam, a wrestler in a standing position).
In case of equilibrium biomechanical system For the application of dynamic indicators of stability, it is necessary to take into account significant refinements.
Firstly, area of effective support of a person does not always coincide with the surface of the support. In a person, as in a solid body, the support surface is limited by lines connecting the extreme points of support (or the outer edges of several support areas) (see Fig. 51, e). But in humans, the boundary of the area of effective support is often located inside the contour of the support, since soft tissues (foot barefoot) or weak links (end phalanxes of the fingers in a handstand on the floor) cannot balance the load. Therefore, the tipping line is displaced inward from the edge of the supporting surface, the area of effective support is less than the area of the bearing surface.
Secondly, a person never deviates with the whole body relative to the line of overturning (like a cube), but moves relative to the axes of any joints without completely maintaining the posture (for example, when standing - movements in the ankle joints).
Thirdly, when approaching the boundary position, it often becomes difficult to maintain the posture and not only the “hardened body” overturns around the overturning line, but the posture changes with the fall. This differs significantly from the deflection and capsizing of a rigid body around the capsizing face (tilting).
Thus, the stability angles in a boundedly stable equilibrium characterize dynamic stability as the ability to restore equilibrium. When determining the stability of the human body, it is also necessary to take into account the boundaries of the area of effective support, the reliability of maintaining the posture to the boundary position of the body and the real tipping line.
In physical exercises, a holding bond (hard) is often found. Then the conditions for maintaining equilibrium require taking into account the two-way connection by considering the corresponding reactive forces caused by such a connection.
3. PRESERVATION AND RESTORATION OF THE POSITION OF THE HUMAN BODY
A person can not only maintain balance, but also restore it in cases of violation. The difference between the equilibrium of biomechanical systems and the equilibrium of solid physical bodies lies not in the presence of special laws of mechanics for living systems, but in their more complex use due to the peculiarities of living systems.
Rigid body statics
Statics considers the equilibrium conditions of a body or system of bodies. If several forces act on a body at rest, the directions of which intersect at one point, then it will remain at rest when the sum (vector) of these forces is equal to zero. The point of application of force can be displaced along the line of its action.
Center of gravity of a rigid body or system of bodies
Gravity acts on every particle of the body. The point at which the resultant of the forces of gravity acting on individual points of the body is applied is called center of gravity. The sum of the moments of gravity of all particles of the body relative to the center of gravity is equal to zero.
Types of body balance
If, with a sufficiently small deviation of the body from the equilibrium position, forces arise that tend to return the body to its original position, then such an equilibrium is called sustainable.
Usually, after the action of small perturbations (displacements, shocks) on a body in stable equilibrium, it begins to oscillate with a small amplitude around the equilibrium position; these oscillations are then damped by friction and equilibrium is restored.
In the position of stable equilibrium, the potential energy of the body has a minimum value (under the action of conservative forces).
If, however, with an arbitrarily small deviation of the body from the equilibrium position, forces arise that tend to increase this deviation, then such a position is called unstable.
In an indifferent equilibrium position, when the body deviates, no forces arise, and the new position is also an equilibrium position.
Equilibrium conditions on an inclined plane
To balance a body with weight P, on an inclined plane making an angle α with the horizon, you need to apply a force F equal to F 1 , and F 1 =P sinα force F should be directed along the inclined plane (Fig. 1). In this case, the body presses on an inclined plane with a force F 2 =P sinα, and the inclined plane acts with the same force on the body lying on it. A freely lying body will rest on an inclined plane until the rolling force becomes greater than the static friction force. This will happen when tgα > k, where k is the static friction coefficient.
The conditions for the equality of the moments of forces also apply to the equilibrium of the gate (Fig. 3, a) or winches.
Blocks
The fixed block (Fig. 3b) serves only to change the direction of the acting force. The movable block (Fig. 3, c) allows you to get a gain in strength. With a stationary or uniformly rotating movable block, the sum of all active forces and the sum of all moments of forces are equal to zero.
Hence it follows that
The chain hoist (Fig. 4) is a system of movable and fixed blocks connected in a common holder. If the chain hoist has n movable and n fixed blocks, then the force F balancing force P, is equal to F = P/2n.
In the absence of friction, the force P, acting along the axis of the screw, is balanced by the force F attached to the handle (Fig. 5):
| Body | Center of gravity position |
|---|---|
| thin rod | In the middle of the rod |
| Cylinder or prism | At the midpoint of a straight line connecting the centers of the bases of a cylinder or prism |
| Ball | In the center |
| Flat segment of small thickness | On the axis of symmetry, offset from the base by 2/5 of its height |
| pyramid or cone | On the segment connecting the top with the center of the base; shifted by ¼ of this segment |
| Hemisphere | On the axis of symmetry, offset from the center by 3/8 of the radius |
| Solid triangular thin plate | At the point of intersection of the medians |





