Forces in the nature of elasticity friction gravitation. Strength. Force types. Elastic force. Hooke's law. Friction force and its types. Gravity and body weight
There are four types of forces in nature: gravitational, electromagnetic, nuclear and weak.
gravitational forces, or gravitational force, operate between all bodies. But these forces are noticeable if at least one of the bodies has dimensions commensurate with the dimensions of the planets. The forces of attraction between ordinary bodies are so small that they can be neglected. Therefore, gravitational forces can be considered the forces of interaction between the planets, as well as between the planets and the Sun or other bodies that have a very large mass. These can be stars, satellites of planets, etc.
Electromagnetic forces act between bodies that have an electric charge.
nuclear forces(strong) are the most powerful in nature. They act inside the nuclei of atoms at distances of 10 -13 cm.
Weak Forces, like nuclear ones, act at small distances of the order of 10 -15 cm. As a result of their action, processes occur inside the nucleus.
Mechanics considers gravitational forces, elastic forces and frictional forces.
Gravitational forces

Gravity is described law gravity. This law was outlined by Newton in the middle XVII in. in Mathematical Principles of Natural Philosophy.
Gravitycalled the gravitational force with which any material particles are attracted to each other.
The force with which material particles are attracted to each other is directly proportional to the product of their masses and inversely proportional to the square of the distance between them. .
G - gravitational constant, numerically equal to the modulus of the gravitational force with which a body having a unit mass acts on a body having the same unit mass and located at a unit distance from it.
G \u003d 6.67384 (80) 10 −11 m 3 s −2 kg −1, or N m² kg −2.
On the surface of the Earth, the gravitational force (gravitational force) manifests itself in the form gravity.

We see that any object thrown in a horizontal direction still falls down. Any object thrown up also falls down. This is due to the force of gravity acting on any material body located near the surface of the Earth. Gravity acts on bodies and on the surfaces of other astronomical bodies. This force is always directed vertically downwards.
Under the influence of gravity, the body moves to the surface of the planet with an acceleration called acceleration free fall .
The free fall acceleration on the Earth's surface is denoted by the letter g .
F t = mg ,
Consequently,
g = F t / m
g \u003d 9.81 m / s 2 at the poles of the Earth, and at the equator g \u003d 9.78 m / s 2.
When solving simple physical tasks value g it is considered to be equal to 9.8 m / s 2.
The classical theory of gravitation is applicable only for bodies with a speed much lower than the speed of light.
elastic forces

Forces of elasticity called the forces that arise in the body as a result of deformation, causing a change in its shape or volume. These forces always strive to return the body to its original position.
During deformation, the particles of the body are displaced. The elastic force is directed in the direction opposite to the direction of particle displacement. If the deformation stops, the elastic force disappears.
The English physicist Robert Hooke, a contemporary of Newton, discovered a law establishing a relationship between the force of elasticity and the deformation of a body.
When the body is deformed, an elastic force arises, which is directly proportional to the elongation of the body, and has a direction opposite to the movement of particles during deformation.
F = k ∆ l ,
where to is the rigidity of the body, or coefficient of elasticity;
∆ l - the amount of deformation, showing the amount of elongation of the body under the influence of elastic forces.
Hooke's law is valid for elastic deformations when the elongation of the body is small, and the body restores its original dimensions after the forces that caused this deformation disappear.
If the deformation is large and the body does not return to its original shape, Hooke's law does not apply. At very large deformations, the destruction of the body occurs.
Friction forces
Friction occurs when one body moves over the surface of another. It has an electromagnetic nature. This is a consequence of the interaction between atoms and molecules of adjoining bodies. The direction of the friction force is opposite to the direction of motion.
Distinguish dry and liquid friction. Friction is called dry if there is no liquid or gaseous layer between the bodies.
A distinctive feature of dry friction is static friction, which occurs when bodies are at relative rest.
Value static friction forces always equal to the value external force and directed in the opposite direction. The static friction force prevents the body from moving.
In turn, dry friction is divided into friction slip and friction rolling.
If the magnitude of the external force exceeds the magnitude of the friction force, then in this case slippage will appear, and one of the contacting bodies will begin to move forward relative to the other body. And the force of friction will be called sliding friction force. Its direction will be opposite to the direction of sliding.
The sliding friction force depends on the force with which the bodies press on each other, on the state of the rubbing surfaces, on the speed of movement, but does not depend on the contact area.
The sliding friction force of one body on the surface of another is calculated by the formula:
F tr. = k N ,
where k- coefficient of sliding friction;
N - strength normal reaction acting on the body from the side of the surface.
Rolling friction force occurs between a body that rolls over a surface and the surface itself. Such forces appear, for example, when the tires of a car come into contact with the road surface.
The value of the rolling friction force is calculated by the formula
where F t – rolling friction force;
f is the coefficient of rolling friction;
R is the radius of the rolling body;
N - pressing force.
Lecture 2. Dynamics of a material point.
Lecture plan
Newton's laws. The basic equation of the dynamics of translational motion.
Types of interactions. Forces of elasticity and friction.
The law of universal gravitation. Gravity and body weight.
Newton's laws. The basic equation of the dynamics of translational motion.
Dynamics studies the movement of bodies, taking into account the causes that cause this movement.
Dynamics is based on Newton's laws.
law. Exist inertial systems reference (ISO), in which the material point (body) maintains a state of rest or uniform rectilinear motion, until the impact from other bodies takes it out of this state.
The property of a body to maintain a state of rest or uniform rectilinear motion in the absence of influence of other bodies on it is called inertia(inertia).
ISO is a frame of reference in which a body, free from external influences, is at rest or moves uniformly in a straight line.
An inertial reference frame is one that is at rest or moves uniformly in a straight line with respect to any IFR.
The frame of reference, moving with acceleration relative to the IFR, is non-inertial.
Newton's law, also called the law of inertia, was first formulated by Galileo. Its content boils down to 2 statements
All bodies have the property of inertia
ISO exists.
Galileo's principle of relativity all mechanical phenomena in all ISOs occur in the same way, i.e. it is impossible to establish by any mechanical experiments inside the IFR whether the given IFR is at rest or moves uniformly in a straight line.
In most practical problems, the frame of reference, rigidly connected with the Earth, can be considered as ISO.
From experience it is known that under the same influences, different bodies change their speed unequally, i.e. acquire various accelerations, the acceleration of bodies depends on their mass.
Weight- a measure of the inertial and gravitational properties of the body. With the help of precise experiments, it has been established that the inertial and gravitational masses are proportional to each other. Choosing units in such a way that the coefficient of proportionality becomes equal to one, we get that m and \u003d m g, therefore, they simply talk about body weight.
[m]=1kg - mass of platinum-iridium cylinder, diameter and height of which are h=d=39mm.
To characterize the action of one body on another, the concept of force is introduced.
Strength- a measure of the interaction of bodies, as a result of which the bodies change their speed or deform.
Force is characterized by a numerical value, direction, point of application. The line along which the force acts is called line of force. The simultaneous action of several forces on a body is equivalent to the action of one force, called resultant, or the resulting force and equal to their geometric sum:
Newton's second law - the basic law of the dynamics of translational motion - answers the question of how the motion of a body changes under the action of forces applied to it.
IIlaw. The acceleration of a material point coincides in direction with the force acting on it and is equal to the ratio of this force to the mass of the material point.
Where is the resultant force.
The force can be expressed by the formula
,
![]()
1N is the force under which a body with a mass of 1 kg receives an acceleration of 1 m / s 2 in the direction of the force.
Newton's second law can be written in a different form by introducing the concept of momentum (Lomonosov did this for the first time).

Pulse- a vector quantity numerically equal to the product of the body's mass and its speed and co-directed with the speed vector.
 = - the basic equation of the dynamics of translational motion:
= - the basic equation of the dynamics of translational motion:
the rate of change of momentum of a material point is equal to the force acting on it.
According to this law, the change in the momentum of a material point is equal to the momentum of the force acting on it:

The nature of the interaction between bodies is determined by Newton's 3rd law:
I  IIlaw. Two material points act on each other with forces equal in magnitude, opposite in direction and directed along the straight line connecting these points (Fig. 1):
IIlaw. Two material points act on each other with forces equal in magnitude, opposite in direction and directed along the straight line connecting these points (Fig. 1):
Types of interactions. Forces of elasticity and friction.
Physical interactions are called interactions that lead to a change in the speed of bodies. Physical interactions are divided into 2 types: fundamental and derivative.
Fundamental Interactions:
These interactions are called fundamental because:
a) none of their properties is currently explained on the basis of more general laws;
b) all other interactions can be represented as the result of fundamental interactions.
The interaction of bodies at a distance is carried out by a material object - a field and occurs at a finite speed equal to the speed of light in vacuum With.
Field- a special form of the existence of matter. Force field- a region of space, at each point of which a material particle is affected by a force determined in magnitude and direction, which depends on the coordinates of this point. The field plays the role of a carrier of this type of interaction.
Various forces act in mechanical processes: elasticity, friction, gravity, weight.
Elastic force- this is the force that arises in the body during elastic deformation (has an electromagnetic nature).
elastic called deformation, in which the body restores its original shape and dimensions after the termination of the deforming force.
Plastic called deformation, in which the body takes on new shapes and sizes after the termination of the deforming force.
In real bodies, elastic deformations are always combined with plastic ones.
Hooke's law. FROM The force of elasticity that occurs in the body during elastic deformation is proportional to the magnitude of the deformation and is directed in the direction opposite to the deformation:
where  - stiffness or coefficient of elasticity, numerically equal in strength elasticity arising from a single deformation;
- stiffness or coefficient of elasticity, numerically equal in strength elasticity arising from a single deformation;  - deformation of the body, numerically equal to the absolute change in its length.
- deformation of the body, numerically equal to the absolute change in its length.
Friction forces arise when moving bodies in contact (or their parts) relative to each other, they are directed tangentially to the rubbing surfaces and oppose the relative displacement of these surfaces.
The force of friction arises not only when one surface slides relative to another, but also when trying to cause such a slip. In this case, it is called the static friction force.
The maximum force of static friction and the force of sliding friction are directly proportional to the magnitude of the normal pressure force N, pressing the rubbing surfaces to each other:
 ,
,
where k- coefficient of friction, dimensionless quantity.
Friction forces are electromagnetic in nature.
The law of universal gravitation. Gravity and body weight.
AT  All bodies mutually attract each other. The law that this attraction obeys was established by Newton and is called law of universal gravitation. According to this law, the force with which two material points attract each other is directly proportional to the product of their masses and inversely proportional to the square of the distance between them:
All bodies mutually attract each other. The law that this attraction obeys was established by Newton and is called law of universal gravitation. According to this law, the force with which two material points attract each other is directly proportional to the product of their masses and inversely proportional to the square of the distance between them:
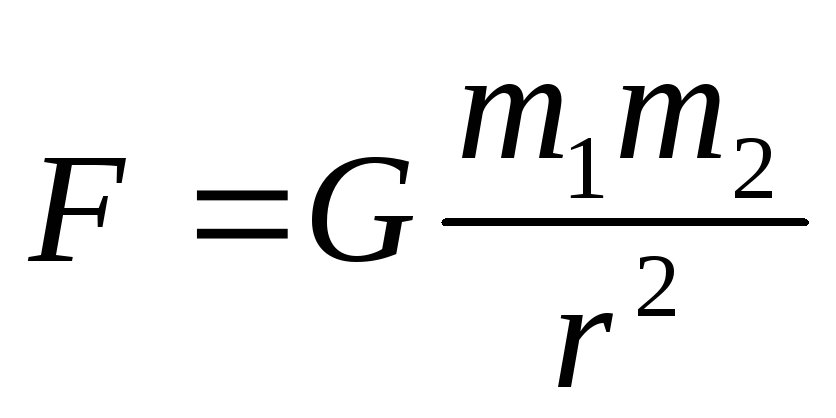 ,
(1)
,
(1)
where  -11
-11  is the gravitational constant.
is the gravitational constant.
For the first time experimental proof of the law of universal gravitation for terrestrial bodies and numerical definition carried out by the English physicist T. Cavendish (1798). If in (1) we substitute m=m=1kg, r\u003d 1m, then the force turns out to be numerically equal .
physical meaning : two material points with a mass of 1 kg, located at a distance of 1 m from each other, are mutually attracted with a force of 6.67 10N.
F - gravitational force or the force of universal gravitation, it is directed along a straight line connecting material points.
To determine the force of mutual attraction of bodies, they must be divided into elementary masses, the forces of attraction between all elements taken in pairs should be calculated using formula (1), and then they should be added (integrated) geometrically, which is a complex mathematical problem.
If the interacting bodies are homogeneous balls, such calculations lead to formula (1), where r - the distance between their centers.
Gravity- this is the force under the influence of which the body falls to the surface of the planet with the acceleration of free fall.
E 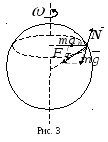 If we do not take into account the rotation of the planet, then the force of gravity coincides with the force of gravity towards the planet. However, the reaction force of the earth's surface also acts on the body. The resultant of these forces creates a normal acceleration
If we do not take into account the rotation of the planet, then the force of gravity coincides with the force of gravity towards the planet. However, the reaction force of the earth's surface also acts on the body. The resultant of these forces creates a normal acceleration
 ,
directed towards the center of the circle along which the body moves in the process of its daily rotation (Fig. 3). Taking into account these factors, the force of gravity is numerically equal to
,
directed towards the center of the circle along which the body moves in the process of its daily rotation (Fig. 3). Taking into account these factors, the force of gravity is numerically equal to  , but directed opposite to it along the plumb line.
, but directed opposite to it along the plumb line.

On the pole:  .
.
At the equator:  ,
,
where - angular velocity of the daily rotation of the Earth.
AT  a consequence of the effect of gravity on the body, the body presses on the support or stretches the suspension on which it hangs (Fig. 4).
a consequence of the effect of gravity on the body, the body presses on the support or stretches the suspension on which it hangs (Fig. 4).
The weight is the force with which the body presses on the support or stretches the suspension.
According to Newton's third law,
Or 
Let us determine the weight of a body with mass m in various situations.
1. The body is at rest or moves uniformly in a straight line relative to the surface of the Earth.
2. The body moves vertically upwards with acceleration  (or down with deceleration).
(or down with deceleration).
Overload shows how many times the weight of a body moving with acceleration is greater than the weight of a stationary body.

Examples of overloads: during takeoff - 1.5; the pilot at the time of ejection - up to 16; during the descent of the "East" and "Sunrise" 8-10.
3. The body moves vertically down with acceleration (or up with deceleration).
In these cases, the weight is reduced compared to the weight of the stationary body.
If at the same time  , then
, then  .
.
Weightlessness is the state of a body when its weight is zero.
This ratio expresses the experimentally established Hooke's law . Coefficient k called body rigidity. In the SI system, stiffness is measured in newtons per meter(N/m). The stiffness coefficient depends on the shape and dimensions of the body, as well as on the material. In physics, Hooke's law for tensile or compressive deformation is usually written in a different form. The ratio ε = x / l called relative deformation , and the relation σ = F / S = –F ex / S, where S is the cross-sectional area of the deformed body, is called voltage . Then Hooke's law can be formulated as follows: the relative strain ε is proportional to the stress σ:
| |
Coefficient E in this formula is called Young's modulus . Young's modulus depends only on the properties of the material and does not depend on the size and shape of the body. Young's modulus various materials varies widely. For steel, for example, E≈ 2 10 11 N / m 2, and for rubber E≈ 2 10 6 N/m 2 , i.e. five orders of magnitude less.
Hooke's law can also be generalized to the case of more complex deformations. For example, when bending deformations the elastic force is proportional to the deflection of the rod, the ends of which lie on two supports (Fig. 1.12.2).
| Figure 1.12.2. bending deformation. |
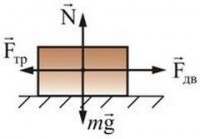
The elastic force acting on the body from the side of the support (or suspension) is called support reaction force. When the bodies come into contact, the reaction force of the support is directed perpendicular contact surfaces. Therefore, it is often called strength. normal pressure. If the body lies on a horizontal fixed table, the support reaction force is directed vertically upward and balances the force of gravity: The force with which the body acts on the table is called the weight of the body.
In technology, spiral-shaped springs(Fig. 1.12.3). When springs are stretched or compressed, elastic forces arise, which also obey Hooke's law. Coefficient k called spring rate . Within the limits of applicability of Hooke's law, springs are capable of greatly changing their length. Therefore, they are often used to measure forces. A spring whose tension is graduated in units of force is called dynamometer. It should be borne in mind that when a spring is stretched or compressed, complex torsion and bending deformations occur in its coils.
| Figure 1.12.3. Spring extension deformation. |
Unlike springs and some elastic materials (rubber), the tensile or compression deformation of elastic rods (or wires) obeys Hooke's linear law within very narrow limits. For metals, relative strain ε = x / l should not exceed 1%. At large deformations, irreversible phenomena (fluidity) and destruction of the material occur.
Friction electromagnetic
Dry friction forces tangentially
Dry friction that occurs when bodies are at relative rest is called static friction . Strength static friction always equal in magnitude to the external force and directed in the opposite direction (Fig. 1.13.1).
The static friction force cannot exceed a certain maximum value ( F tr) max . If the external force is greater ( F tr) max , relative slip occurs. The force of friction in this case is called sliding friction force . It is always directed in the direction opposite to the direction of motion and, generally speaking, depends on the relative velocity of the bodies. However, in many cases, approximately the force of sliding friction can be considered independent of the magnitude of the relative velocity of the bodies and equal to the maximum force of static friction. This dry friction force model is used to solve many simple physical problems (Fig. 1.13.2).
Experience shows that the force of sliding friction is proportional to the force of the normal pressure of the body on the support, and, consequently, the reaction force of the support
|
The coefficient of proportionality μ is called sliding friction coefficient .
Friction coefficient μ is a dimensionless quantity. Usually the coefficient of friction is less than unity. It depends on the materials of the contacting bodies and on the quality of the surface treatment. When sliding, the friction force is directed tangentially to the contacting surfaces in the direction opposite to the relative speed (Fig. 1.13.3).
viscous friction force With viscous friction, there is no static friction.
The force of viscous friction strongly depends on the speed of the body. At low enough speeds F F
Friction forces also arise when a body rolls. However rolling friction force usually quite small. When solving simple problems, these forces are neglected.
Friction- one of the types of interaction of bodies. It occurs when two bodies come into contact. Friction, like all other types of interaction, obeys Newton's third law: if a friction force acts on one of the bodies, then the force of the same magnitude, but directed in the opposite direction, also acts on the second body. Friction forces, like elastic forces, have electromagnetic nature. They arise as a result of the interaction between atoms and molecules of adjoining bodies.
Dry friction forces called the forces that arise when two solid bodies come into contact in the absence of a liquid or gaseous layer between them. They are always directed tangentially to adjacent surfaces.
When driving solid body occurs in a liquid or gas viscous friction force . The force of viscous friction is much less than the force of dry friction. It is also directed in the direction opposite to the relative velocity of the body. With viscous friction, there is no static friction .
At sufficiently low velocities, the magnitude of the viscous friction force is proportional to the velocity of relative motion υ of the bodies, proportional to the area S and inversely proportional to the distance between the planes h.
The coefficient of proportionality, depending on the type of liquid or gas, is called dynamic viscosity coefficient .
The force of viscous friction strongly depends on the speed of the body. At low speeds F tr ~ υ, at high speeds F tr ~ υ 2 . In this case, the coefficients of proportionality in these ratios depend on the shape of the body.
In the world around us, there are countless bodies that interact with each other. But, despite this variety of forces, it is customary to single out several of their types in particular.
The force of elasticitycalled the force that occurs in the body when its shape or size changes. This happens if the body is compressed, stretched, bent or twisted. For example, an elastic force arose in a spring as a result of its compression and acts on a brick.
The elastic force is always directed opposite to the force that caused the change in the shape or size of the body. In our example, the fallen brick compressed the spring, that is, it acted on it with a downward force. As a result, an elastic force appeared in the spring, directed in the opposite direction, that is, upwards. We can confirm this by observing the rebound of a brick.
gravitycalled the force with which all bodies in the world are attracted to each other(see § 2-a). The gravitational force is gravity - the force with which a body located near a planet is attracted to it. For example, a rocket standing on Mars is also affected by gravity.
Gravity is always directed towards the center of the planet. The figure shows that the Earth is attracting the boy and the ball with forces directed downward, that is, towards the center of the planet. As you can see, the "down" direction is different for different places on the planet. This will be true for other planets and cosmic bodies as well. We will study the force of gravity in more detail in § 3-d.
By the force of frictioncalled the force that prevents one body from slipping on the surface of another. Consider the drawing. Sudden braking of the car is always accompanied by a "squeal of brakes". This sound is caused by the tires slipping on the pavement. In this case, the tires are strongly erased, since a friction force acts between the wheels and the road, preventing slippage.
The force of friction is always directed opposite to the direction of (possible) sliding of the considered body over the surface of another. For example, when a car brakes sharply, its wheels slip forward, which means that the friction force acting on them on the road is directed in the opposite direction, that is, backwards.
The force of friction arises not only when one body slides over the surface of another. There is also static friction force. For example, pushing off the road with a boot, we do not observe its slippage. In this case, a static friction force arises, thanks to which we move forward. In the absence of this strength, we would not be able to take a step, as, for example, on ice.
By the power of Archimedes(or buoyant force) is the force with which a liquid or gas acts on a body immersed in them - they push it out. The figure shows that water acts on the air bubbles exhaled by the fish - it pushes them to the surface. Water also acts on fish and stones - it reduces their weight (the force with which stones press on the bottom).
§5 Strength. Force types
In mechanics, two types of influence on a body from other bodies are considered.
1) a given body under the influence of other bodies changes its speed, i.e., acquires acceleration.
2) this body is deformed under the influence of other bodies, that is, it changes its shape and size
To describe these effects, he uses the concept of force:
Force - a vector quantity is a measure of the mechanical action on the body under consideration from other bodies.
Forces imparting acceleration to bodies or deforming them can be divided into two groups:
a) forces of distribution over the volume of the body, for example, gravitational forces.
It is typical for such forces that each elementary part of the body experiences the action of a force, regardless of the presence or absence of neighboring parts of the body.
b) concentrated forces, i.e. applied to a certain place of the body - at a point, along a certain line or surface of the body. In this case, the action of an external force is transmitted from one part to another due to the existence of a mutual connection between them (this is a cause of deformation).
IElastic forces.
Under the action of forces applied to the body, it is deformed. If, after the termination of the action of forces, the body takes on its original dimensions and shape, then the deformation is called elastic, and if it does not restore the shape and dimensions, then the deformation is called inelastic. Elastic deformations are observed if the applied force is less than the limiting force at which inelastic deformation occurs (the so-called elastic limit)
Consider a spring one end of which is fixed, and a tensile (or compressive) force Fin is applied to the second.
From experience it follows that with small deformations, the elongation of the spring X is directly proportional to the tensile force.
Hooke's law: elastic force F ex. is directly proportional to the deformation (displacement) X. The coefficient of proportionality in Hooke's law is called the coefficient of spring stiffness - k.
The rod behaves like a spring. If equal to the ends of the rod are applied F1 = F2 = F forces uniformly distributed over the surface S of the rod, directed along its axis, then the initial length of the rod will change by . To characterize the deformation of the rod, a relative change in its length is introduced- relative deformation.
 Physical quantity, numerically equal to the elastic force dF ex. per unit area dS section of the body is called stress.
Physical quantity, numerically equal to the elastic force dF ex. per unit area dS section of the body is called stress.
If strength d F ex. directed normal to the site dS, the stress is called normal and is denoted by σ. If a dF ex. directed tangentially to the site dS- tangent and denoted τ .
Hooke's law (for a rod): the stress of an elastically deformed body is directly proportional to its relative deformation.
G = E Hooke's law.
Young's modulus E- modulus of elasticity, numerically equal to the stress that occurs at a relative strain equal to one. Valueis called the coefficient of elasticity.
![]()
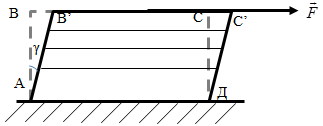 A shear is a deformation of a body, in which all its flat layers parallel to a certain shear plane, without bending or changing in size, are displaced parallel to each other.
A shear is a deformation of a body, in which all its flat layers parallel to a certain shear plane, without bending or changing in size, are displaced parallel to each other.
With a small shift
![]()
Absolute shift
γ - shift angle or relative shift expressions in radians.
G - shear modulus - equal to shear stress at relative shear tg γ =1, therefore,γ =
(although, almost all substances are destroyed at much smaller angles).
III. Gravity and weight
Under the influence of the force of attraction to the Earth, all bodies fall with the same acceleration relative to the Earth's surface.g= 9.8 m / s 2 - acceleration of gravity. Therefore, for any body of massmthere is a force called gravity.





