I.2.1 Newton's first law. inertial reference systems
Body (material point) , which is not subject to external influences, is either at rest or moves in a straight line and uniformly. Such a body is called free. The motion of such a body is called free movement or inertia.
There is a frame of reference in which all free bodies move in a straight line and uniformly
There are such frames of reference, called inertial ones, with respect to which a material point, in the absence of external influences, retains the magnitude and direction of its velocity indefinitely
Such systems are called inertial reference systems - Newton's first law.
Newton's second law
Any body resists when trying to set it in motion, i.e. give it some speed. This property of bodies is called inertia. Measure of inertia - weight.
A system of bodies that is not influenced by other bodies is called closed system or isolated system. In such systems, bodies can only interact with each other. Let closed system consists of two bodies (two material points). The speed of the bodies and , and the increment of these speeds for the same period of time. The vectors and have opposite directions and are related by the relation ![]() . The coefficients and are constant and have identical signs and are called masses or inertial masses of bodies 1 and 2.
. The coefficients and are constant and have identical signs and are called masses or inertial masses of bodies 1 and 2.
Pulse or amount of motion of a material point- a vector equal to the product of the mass of a point and its speed.
System momentum - vector sum impulses of individual material points that make up the system: ![]() for a system consisting of material points.
for a system consisting of material points.
Pulse isolated system remains constant over time Law of conservation of momentum.
Strength (in mechanics)- any reason that changes the momentum of the body (this is a qualitative characteristic). Quantitative characteristic is expressed by the equation:
![]()
This equation is only valid if m does not depend on speed.
In an inertial frame of reference, the derivative of the momentum of a material point with respect to time is equal to the force acting on it.
In an inertial frame of reference, the acceleration that a material point receives is directly proportional to the resultant of all forces applied to it and inversely proportional to its mass
The above statements are nothing but two formulations Newton's second law. The equation corresponding to the definition of the law is equation of motion of a material point.
Newton's third law
The interaction forces of two material points are equal in magnitude, oppositely directed and act along the straight line connecting these material points.
For every action there is an equal and opposite reaction.
Material points act on each other in pairs with forces of the same nature, directed along the straight line connecting these points, equal in absolute value and opposite in direction: . Or, if the system consists of a set of material points, then , i.e. material points interact in pairs. Both forces are directed along the straight line connecting these points.
These three expressions are different formulations Newton's third law.
Any system moving with acceleration relative to an inertial frame of reference is non-inertial.
I.2.1 NEWTON'S FIRST LAW. INERTIAL REFERENCE SYSTEMS.
Newton's first law: any body retains its state of rest or uniform rectilinear motion until an external influence forces it to change this state.
Newton's first law states that the state of rest or uniform rectilinear motion does not require any external influences to maintain it. This manifests a special dynamic property of bodies, called inertia . Accordingly, Newton's first law is also called law of inertia , and the motion of a body free from external influences is inertia .
In the above formulation of Newton's first law, it is implied that the body is not deformed, i.e. absolutely solid, and that in the absence of external influences, it moves forward. In addition, a rigid body can also rotate uniformly by inertia. If in Newton's first law we speak not about a "body", but about a material point, which, by its very definition, cannot be deformed or rotated, then the need for all these reservations disappears. Considering all the above, we can give the following formulation of this law: there are such frames of reference, called inertial ones, relative to which a material point, in the absence of external influences, retains the magnitude and direction of its velocity indefinitely. The law is also true in a situation where external influences are present, but mutually compensated (this follows from Newton's 2nd law, since the compensated forces impart zero total acceleration to the body).
The fact that the body remains at rest (i.e., maintains a speed equal to zero) until another body acts on it is quite understandable and is confirmed by everyday observations. The stone itself will not budge until it is moved by someone or something. But we find it hard to believe that a body can forever maintain a uniform and rectilinear motion. A thrown stone experiences air resistance and attraction to the earth. If there were no such influences, the body would retain the state of uniform and rectilinear motion (that is, it would retain the magnitude and direction of its speed). Or another example, having run up, a person cannot instantly stop or instantly turn to the side. In order to go around a pole on the run, a person instinctively grabs it with his hand, i.e. resorts to the influence of another body (pillar) to change the direction of its speed.
I.2.2 POWER
By force called vector physical quantity, which is a measure of the impact on a material point or body from other bodies or fields.
A special form of matter that binds particles of matter into single systems and transfers the action of some particles to others with a finite speed is called physical field.
The field acting on a material point with a force is called stationary field, if it does not change over time, i.e. if at any point in the field
The interaction between distant bodies is carried out by means of gravitational and electromagnetic fields.
Gravitational interaction- arises between bodies in accordance with the law of universal gravitation.
Electromagnetic interaction - occurs between bodies or particles that have electric charges.
In addition, there are also strong interaction, which exists, for example, between the particles that make up the nuclei of atoms and weak interaction characterizing, for example, the transformation processes of some elementary particles.
The problems of mechanics take into account gravitational forces (gravitational force) and two types of electromagnetic forces - elastic forces and friction forces.
The forces of interaction between the parts of some considered system of bodies are called internal forces.
The forces of influence on the bodies of a given system from other bodies not included in this system are called external forces.
Aggregate physical bodies, in which interactions with external bodies are absent or compensated, is called closed(isolated) system.
A force is completely defined if its modulus, direction, and point of application are given. The line along which the force is directed is called line of force.
The simultaneous action of several forces ( , …, ) on a material point is equivalent to the action of one force, called resultant or resulting force and equal to their geometric sum:
Formula (I.48) is principle of superposition of forces.
TYPES OF FORCES IN NATURE
The simplest types of forces are those that are due to direct mechanical action of one body on another when they come into contact, these include: traction forces, friction, pressure, elasticity, tension.
Let's stop only on some of them.
Forces of elasticity. The forces arising from the elastic deformation of bodies are called elastic forces . These forces act between the contacting layers of the deformable body, as well as at the point of contact between the deformable body and the body causing the deformation.

For example, from the side of an elastically deformed board, a bar lying on it (Fig. 25) is affected by an elastic force. Elastic forces are forces of electromagnetic nature.
The elastic force acting on the body considered in this problem from the side of the support or suspension is called support reaction force(suspension) or suspension tension force. On fig. 26 shows examples of the application of support reaction forces (force) and suspension tension force (force) to bodies.
The elastic force depends only on the change in the distances between the interacting parts of a given elastic body. The work of the elastic force does not depend on the shape of the trajectory and is equal to zero when moving along a closed trajectory. Therefore, the elastic forces are potential forces (the concept of work and the potentiality of forces will be considered in the chapter I.3 (§ I.3.1, p. 41), (§ I.3.2, p. 45)).
Hooke's Law: the elastic force is proportional to the vector of elongation (compression) and opposite to it in direction:
![]() , (I.49)
, (I.49)
where - body stiffness- the value determined by the elastic force arising from a single deformation of a given body;
The elongation vector is a value that characterizes one-dimensional (linear) tension (compression).
Forces of friction. With any movement of one body on the surface of another, resistance arises to this movement, which we imagine as friction force against this movement.
Distinguish between external and internal friction. external friction called mechanical resistance arising from the relative movement of two contacting bodies in the plane of their contact. For example, external friction exists between a bar and inclined plane on which the bar rests or from which it slides. Under certain conditions, external friction turns into internal friction, at which there is no speed jump in the contact zone when moving from one body to another.
Friction between the surfaces of two solids in contact in the absence of a liquid or gaseous layer between them is called dry friction. Friction between surface solid body and the surrounding liquid or gaseous medium in which the body moves is called liquid or viscous friction.
Dry friction is divided into:
§ static friction– friction in the absence of relative movement of the contacting bodies;
§ sliding friction- friction during the relative motion of the contacting bodies.
The force of friction that prevents the movement of one body on the surface of another is called static friction force.
Usually, when speaking about the force of static friction, they mean ultimate force of static friction. Denote by an external force applied to a body in contact with another body. This force is parallel to the plane of contact. The relative motion of the body occurs under the condition ![]() . The static friction force is caused by the engagement of uneven surfaces of bodies, elastic deformations of these irregularities and adhesion (sticking) of bodies in those places where the distances between their particles are small and sufficient for the occurrence of intermolecular attraction. In this regard, the force of static friction can be considered as a kind of manifestation of elastic forces.
. The static friction force is caused by the engagement of uneven surfaces of bodies, elastic deformations of these irregularities and adhesion (sticking) of bodies in those places where the distances between their particles are small and sufficient for the occurrence of intermolecular attraction. In this regard, the force of static friction can be considered as a kind of manifestation of elastic forces.
It has been experimentally established that the maximum static friction force () does not depend on the contact area of the bodies and is approximately proportional to the modulus of the normal pressure force (), pressing the rubbing surfaces to each other: .
The dimensionless factor is called the static friction coefficient. It depends on the nature and condition of the rubbing surfaces.
Sliding friction is due to the roughness of the rubbing surfaces. The forces of intermolecular interaction also play an important role.
Laws of sliding friction.
I. Ratio of friction force to pressure force (those. to the force that presses against each other rubbing surfaces) there is a constant value for these surfaces.
The first law of friction can be formulated as follows: friction force is directly proportional to pressure force.
It has been experimentally shown that the force of sliding friction is proportional to the force of normal pressure: ![]() .
.
II. The coefficient of friction depends on the materials of the rubbing surfaces.
III. The coefficient of friction does not depend on the size of the rubbing surfaces. If the surface area is very small, so that a moving body can leave a scratch on a stationary one (for example, the tip of a nail), then this law is no longer valid.
IV. The coefficient of friction decreases with increasing speed. This is explained by the fact that at high speeds, not all protrusions of rough surfaces have time to cling to each other deeply enough.
Figure 27 shows a graph of the dependence of the coefficient of friction on the speed of movement.
 |
It can be seen from the graph that the greatest coefficient of friction (hence, the greatest frictional force) exists at rest. This is briefly expressed as follows: the maximum value of the static friction force is greater than the sliding friction force. Laws I, II and III were found by Coulomb from experiments with a tribometer.
Note: in the simplest cases, the friction force and the normal pressure force are related by the inequality , which becomes an equality only in the presence of relative motion. This ratio is called
Wording first law Newton , the experimental basis of which was created by experiments, Galilee, back in 1636, changed several times, but its essence remained the same. Two formulations of this law are currently in use. The most commonly used is the following:
There are such frames of reference with respect to which a progressively moving body keeps its speed constant if no other bodies act on it or the action of other bodies is compensated.
Newton's first law is formulated differently.
The body maintains a state of rest or uniform rectilinear motion until it is subjected to uncompensated action from other bodies or physical fields.
Physical meaning: 1) The law states what will happen to the body if it is not affected by other bodies or the action of other bodies is compensated. 2) Of all frames of reference, Newton's first law singles out those where it is fulfilled; such frames of reference are called inertial
The phenomenon that a body that is not subject to uncompensated external influences maintains its speed constant (including zero if the body is at rest) is called inertia, and the frames of reference relative to which such bodies move at a constant speed or are at rest are called inertial. In this regard, Newton's first law is often called the law of inertia. The rectilinear uniform motion of a body in an inertial frame of reference is called inertial motion. The concept of an inertial frame of reference is fundamental in physics in general and in mechanics in particular.
The laws of mechanics do not depend on which inertial frame of reference they refer to. In other words, all inertial frames of reference for any mechanical phenomena are equal, i.e. there is no special, "main" inertial frame of reference, the movement relative to which could be considered as "absolute movement".
8. Strength. Newton's second law.
Newton's first law indicates that in order to change the speed of a body relative to an inertial frame of reference, i.e. For accelerated motion of a body, it is necessary that some other body act on this body. Such an impact is called force . The nature of forces can be different, but for any force two basic properties are characteristic.
1. Force is a physical quantity, i.e. it can be characterized not only from the qualitative side, which distinguishes it from other physical quantities, but can also be expressed in a certain quantitative way. This is confirmed by the experimental fact that different forces cause different accelerations.
2. Force is a vector quantity. As a result of the action of a force on a body, it acquires an acceleration, which is a vector quantity. Therefore, force is also a vector quantity: by changing the direction of the force, we change the direction of acceleration. The module of the force vector determines the measure of the action of other bodies on a given body.
In this way, strength - a vector physical quantity that characterizes the action of one body on another, which, being uncompensated, leads to a change in the acceleration of this body and is a measure of such an impact. In the SI system, force is 1 N. Force is characterized by: application point, module, direction.
A direct quantitative relationship between the force acting on the body and the acceleration of this body is established by Newton's second law :
The acceleration that a body acquires under the action of a force is directly proportional to this force, and its direction coincides with the direction of this force. Or: The resultant of all forces acting on a body is equal to the product of the body's mass and acceleration.
Physical meaning: 1) The law connects kinematic and dynamic characteristics one body; 2) The law states what will happen to the body if other bodies or fields act on it 3) The unit of force is 1 Newton
Dynamics is the branch of mechanics that deals with different kinds mechanical movements, taking into account the interaction of bodies with each other. The foundations of dynamics are Newton's three laws, which are the result of a generalization of observations and experiments in the field of mechanical phenomena that were known even before Newton and carried out by Newton himself. Newton's laws of dynamics (otherwise called classical dynamics) have a limited area of applicability. They are valid for macroscopic bodies moving at speeds much lower than the speed of light in vacuum. The phenomenon of inertia Let's make observations of the behavior of various bodies relative to the Earth, choosing a fixed frame of reference associated with the Earth's surface. We will find that the speed of any body changes only under the action of other bodies. For example, let the body stand on a stationary cart. Let's push the cart - and the body will topple against the motion. If, on the contrary, the moving trolley with the body is abruptly stopped, it will tip over in the direction of motion. Obviously, if there were no friction between the cart and the body, then the body would not overturn. In the first case, the following would happen: since the speed of the standing body is zero, and the speed of the trolley began to increase, the trolley would slip forward from under the stationary body. In the second case, during the braking of the cart, the body standing on it would retain its speed and slide forward from the stopped cart.
Another example. A metal ball rolls down an inclined chute onto a horizontal plane from the same height h (Fig. 16), therefore, its speed at the point at which it begins horizontal movement is always the same. Let the horizontal surface be sprinkled with sand first. The ball will travel a short distance s1 and stop. Replace the sandy surface with a smooth board. The ball will travel to a stop already much greater distance s2. Replace the board with ice. The ball will roll for a very long time and will cover the distance s3 >> s2 until it stops. This sequence of experiments shows that if we reduce the influence environment on a moving body, its horizontal motion relative to the Earth indefinitely approaches uniform and rectilinear. (When a body moves along a horizontal surface, the attraction of this body by the Earth is compensated by the elasticity of the support - boards, ice, etc.) The fact that the body tends to maintain not any movement, namely rectilinear, is evidenced, for example, by the following experiment (Fig. 17) . A ball moving rectilinearly along a flat horizontal surface, colliding with an obstacle having a curvilinear shape, is forced to move in an arc under the action of this obstacle. However, when the ball reaches the edge of the obstacle, it stops moving in a curvilinear direction and starts moving in a straight line again. Summarizing the results of the above (and similar) observations, we can conclude that if a given body is not affected by other bodies or their actions are mutually compensated, this body is at rest or its velocity remains unchanged relative to the frame of reference fixedly connected with the Earth's surface. The phenomenon of a body maintaining a state of rest or rectilinear uniform motion in the absence or compensation of external influences on this body is called inertia.
The conclusion about the existence of the phenomenon of inertia was first made by Galileo, and then by Newton. This conclusion is formulated in the form of Newton's first law (the law of inertia): there are such frames of reference, relative to which the body (material point), in the absence of external influences on it (or with their mutual compensation), maintains a state of rest or uniform rectilinear motion. Frames of reference in which Newton's first law is satisfied are called inertial. Therefore, inertial reference systems are such reference systems with respect to which the material point, in the absence of external influences on it or their mutual compensation, is at rest or moves uniformly and rectilinearly. 
Observations show that with a very high degree of accuracy it can be considered an inertial frame of reference heliocentric system, in which the origin is associated with the Sun, and the axes are directed to certain "fixed" stars. Frames of reference rigidly connected with the Earth's surface, strictly speaking, are not inertial, since the Earth moves in orbit around the Sun and at the same time rotates around its own axis. However, when describing motions that do not have a global (i.e., worldwide) scale, reference systems associated with the Earth can be considered inertial with sufficient accuracy. Frames of reference that move uniformly and rectilinearly relative to any inertial frame of reference are also inertial (see below). Galileo established that it is impossible to determine whether this system is at rest or moving uniformly and rectilinearly by any mechanical experiments set inside an inertial frame of reference. This statement is called Galileo's principle of relativity or the mechanical principle of relativity. This principle was subsequently developed by A. Einstein and is one of the postulates of the special theory of relativity. Inertial systems references play an extremely important role in physics, since, according to Einstein's principle of relativity, the mathematical expression of any law of physics has the same form in each inertial frame of reference. In the future, we will use only inertial systems (without mentioning this every time). Frames of reference in which Newton's first law is not fulfilled are called non-inertial. Such systems include any frame of reference moving with acceleration relative to the inertial frame of reference.
As the first law, Newton took Galileo's principle of inertia (1632) and supplemented it with the concept of an inertial frame of reference. According to Galileo's principle of inertia free body retains a state of rest or uniform, rectilinear motion until the influence of other bodies takes it out of this state.
It follows from this principle that the state of rest or uniform rectilinear motion does not require any external influences to maintain it. This manifests a special dynamic property of bodies, called inertia. Therefore, Newton's first law is called the law of inertia, and the motion of a body in the absence of influences from other bodies is called inertia movement.
Newton's first law is not valid in all frames of reference. The systems on which it runs are called inertial reference systems.
It has been experimentally established that the practically inertial frame of reference is the heliocentric frame of reference, the origin of which is in the center of the Sun, and the axes are drawn in the direction of three distant stars, chosen, for example, so that they are mutually perpendicular.
For many practical purposes, when moving macroscopic bodies, the system associated with the Earth is used as a reference system. Such a frame of reference is considered to be approximately inertial due to the influence of the daily and annual rotation of the Earth.
Thus, we can give the following formulation of Newton's first law: there are such frames of reference in which the body maintains a state of rest or uniform rectilinear motion until the influence of other bodies takes it out of this state.
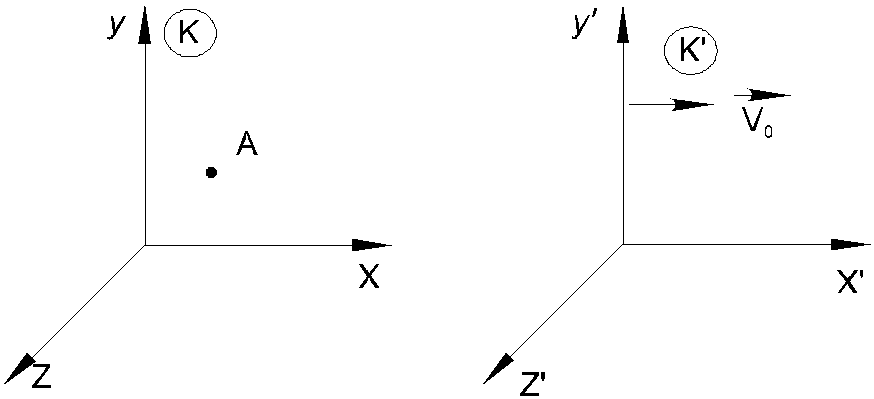
Let us show that any frame of reference that moves uniformly and rectilinearly relative to the inertial frame is also inertial. Let body A be at rest in an inertial frame of reference K (Fig. 3.1). The reference frame K "moves relative to the frame K uniformly and rectilinearly with a speed. The body A relative to the frame K" moves uniformly and rectilinearly with a speed -  , which also satisfies Newton's first law. Therefore, the frame of reference K" is inertial. Thus, according to the known one inertial frame of reference, it is possible to construct as many of them as you like using the method described above.
, which also satisfies Newton's first law. Therefore, the frame of reference K" is inertial. Thus, according to the known one inertial frame of reference, it is possible to construct as many of them as you like using the method described above.
3.1.2. Newton's second law
This law is the basic law of the dynamics of a material point and a rigid body moving forward.
The law establishes a relationship between force, mass and acceleration.
Experience shows that any change in the magnitude or direction of the velocity of a body is caused by its interaction with other bodies.
In mechanics, force is defined as a quantitative measure of the interaction of bodies, which leads to a change in their speed or deformation.
Force is characterized by magnitude, direction and point of application. Consequently, force is a vector quantity.
According to modern ideas based on experience, all interactions observed in nature can be reduced to four fundamental ones: gravitational, weak, electromagnetic and strong.
Gravitational interaction inherent in all material objects. It is determined by the presence of mass in material bodies and obeys Newton's law of universal gravitation. The radius of action of gravitational interaction is unlimited. In the field of the microworld, the role of gravitational interaction is negligible.
Weak interaction- short-range, exists in the microcosm and manifests itself in what leads to a certain kind of instability of elementary particles.
Electromagnetic interaction manifested in the interaction of currents and charges. The range of electromagnetic interaction is unlimited. It is decisive in the formation of atoms, molecules and macroscopic bodies.
Nuclear or strong interaction is the most intense. The radius of the strong interaction is very small ~10 -15 m. Due to this interaction, protons and neutrons are kept in nuclei, despite the strong repulsion of protons.
Non-fundamental forces include forces of elasticity, friction, resistance, and others. All these forces can be reduced to electromagnetic or gravitational, however, this leads to a significant complication of solving problems in mechanics. For this reason, in mechanics, the forces of elasticity and friction are considered along with the fundamental ones.
Another important property of forces, which manifests itself in mechanical interaction, has been experimentally established. Forces in mechanics obey superposition principle, which is as follows: simultaneous interaction of particle M with several othersnparticles with forces  equivalent to the action of one force
equivalent to the action of one force  equal to their vector sum.
equal to their vector sum.
 . (3.1)
. (3.1)
Strength is called the resultant.
As experience shows, all bodies have the property of preventing a change in the magnitude and direction of speed. This property is called inertia.
Mass can be defined in two ways. The first of them is as follows. A reference body is selected, the mass of which is m et is taken as a unit of mass. The mass m of the investigated body is determined from the following ratio, established empirically:
 ,
,
where a and a et - accelerations caused by the action of the same force on the reference and investigated bodies. This defines the so-called inert mass.
The second method is based on the use of the law of universal gravitation. This defines the so-called gravitational mass.
A. Einstein formulated the principle of equivalence of gravitational and inertial masses: the inertial and gravitational masses of the same body are the same.
The equivalence of inertial and gravitational masses makes it possible to choose one unit of measurement for them. As a unit of mass in the SI system, the kilogram (kg) is adopted - the mass of the standard platinum-iridium body stored in France at the International Bureau of Weights and Measures.
The dynamic impact of a moving body on other bodies depends on the speed and mass. Therefore, as a dynamic characteristic of the traffic intensity, we introduce vector quantity  , called the momentum (or momentum) of the body and equal to the product of its mass and speed:
, called the momentum (or momentum) of the body and equal to the product of its mass and speed:
 .
(3.2)
.
(3.2)
The unit of momentum is kilogram-meter divided by a second (kg m/s).
According to Newton's second law, the time derivative of the momentum of a body is equal to the resultant of all forces applied to it:
 . (3.3)
. (3.3)
From (3.3) it follows that the change in momentum occurs in the direction of the resultant force .
Note that Newton's second law in the form (3.3) admits the description of the motion of a body with a variable mass. If the mass of the body is constant, then from (3.2) and (3.3) we obtain the equation of Newton's second law in the form
 , (3.4)
, (3.4)
whence, taking into account formula (2.21), we obtain:
 . (3.5)
. (3.5)
The SI unit of force is a derived unit whose definition is based on formula (3.5). Unit of force - 1 Newton (N) is the force that imparts an acceleration of 1 m to a body with a mass of 1 kg./ With 2 .
Newton's second law is often referred to as the fundamental law of the dynamics of translational motion. With the help of this law in mechanics, two main tasks:
1. Direct main task -establishment of differential equations of motion of a body (points) and their solution.
2. Reverse main problem- finding the dependence of the forces of interaction of bodies on their coordinates, speeds and time, that is, the establishment of the laws of interaction.





