Osnovni pojmovi i primjer samostalnog rada
vezu
Mehanizam poluge - mehanizam, čije karike formiraju samo rotacijske, translacijske, cilindrične i sferne parove. Primjer mehanizma s polugom je mehanizam cam-poluge - uređaj koji je spoj mehanizama poluge sa bregastim mehanizmima. Takve veze se izvode u dvije verzije:
1) dosljedan;
2) paralelno.
U većini slučajeva, mehanizam bregaste poluge se podrazumijeva kao paralelne veze. Mehanizmi bregaste poluge se koriste za promjenu dužine karika polužnih mehanizama u procesu kretanja i, shodno tome, dobijanje određenih zakona kretanja i poboljšanje performansi. Mehanizmi poluge se najčešće koriste u kombinaciji sa zupčanim mehanizmima ili mehanizmima poluge mjenjača. Ova vrsta mehanizama su uređaji koji sadrže mehanizme zupčanika i poluge koji međusobno djeluju, a njihove veze mogu biti serijske ili paralelne.
U raznim alatnim mašinama, mašinama i sistemima automatskog upravljanja u mašinskoj industriji koriste se uglavnom paralelno povezani mehanizmi ručice menjača. Konkretno, koristi se takozvani rimski zupčanik - mehanizam sa sedam karika s klizačem koji se pokreće kroz polugu za sabiranje i dvije klipnjače iz dva zupčanika koji se međusobno spajaju. U takvom mehanizmu, ili poluga ili zupčanik može biti pogonski ili pogonski. Mehanizmi zupčaste poluge u brojnim varijantama obično sadrže dva para međusobno povezanih zupčanika, od kojih je jedan spojen karikom polužnog mehanizma. Općenito, mehanizmi ručice mjenjača omogućuju postizanje različitih zakona kretanja karika, poboljšanje karakteristike snage ceo mehanizam. U većini slučajeva, mehanizmi ručice mjenjača koriste se kao vodilice i mehanizmi prijenosa (posebno u automatskim strojnim linijama koje se koriste u mnogim sektorima industrijskog i ekonomskog kompleksa Rusije).
autor Tim autoraMehanizam na preklop Preklopni mehanizam je uređaj za ciklično povlačenje perforirane trake (posebno filmske trake u filmskim projektorima ili u filmskim kamerama). Takav mehanizam izvodi povremeno jednosmjerno kretanje. Kao mehanizam na preklop
Iz knjige Velika enciklopedija tehnologije autor Tim autoraZupčasti mehanizam Složeni zupčanik je uređaj sa zupčanicima u kojem učestvuje više od dva zupčanika. Uređaji se mogu razvijati i kao vrsta konstrukcijske tehnologije, i uz pomoć sekvencijalnih,
Iz knjige Velika enciklopedija tehnologije autor Tim autora Iz knjige Velika enciklopedija tehnologije autor Tim autoraMehanizam bregastog mehanizma je mehanizam koji uključuje bregastu. U različitim sektorima industrijskog i ekonomskog kompleksa Rusije, bregasti mehanizmi se široko koriste u različitim verzijama.Opcija prva: u mehanizmu, brega ima radni
Iz knjige Velika enciklopedija tehnologije autor Tim autoraMehanizam klackalice Mehanizam klackalice je polužni mehanizam koji uključuje klackalicu. U raznim mašinama, alatne mašine i druga oprema se široko koriste različite vrste preklopni mehanizam: 1) preklopno-klizni mehanizam; 2) klackalica
Iz knjige Velika enciklopedija tehnologije autor Tim autoraMehanizam Mehanizam je sistem koji se sastoji od nekoliko elemenata (ili karika) i dizajniran da pretvara kretanje jednog ili više čvrstih elemenata u potrebna kretanja drugih elemenata ovog sistema. Mehanizme karakterišu: 1) mehanički
Iz knjige Velika enciklopedija tehnologije autor Tim autoraMehanizam poluge Mehanizam poluge je mehanizam čije karike formiraju samo rotacijske, translatorne, cilindrične i sferne parove. Primjer mehanizma poluge je mehanizam cam-poluge - uređaj koji je spoj
Iz knjige Velika enciklopedija tehnologije autor Tim autoraMehanizam za savijanje Mehanizam za savijanje je uređaj dizajniran za savijanje lista papira i koji se široko koristi u štampariji.Ovaj mehanizam funkcioniše na sledeći način: list papira se pomera kada se cilindar za uvlačenje okreće u
Iz knjige Velika enciklopedija tehnologije autor Tim autoraMehanizam trenja Mehanizam trenja je uređaj u kojem se prijenos kretanja, ubrzanja ili kočenja vrši zbog sila trenja između elemenata pritisnutih jedan na drugi. U mehanizmu trenja koji se sastoji od krutih elemenata (u mjenjaču, kvačilu,
6.1. Postavljanje problema, vrste i metode sinteze
Problemi sinteze polužnih mehanizama u opštem slučaju su složeni problemi optimalnog projektovanja, uključujući faze strukturnog, kinematičkog i dinamičkog proračuna. Zbog toga se radi pojednostavljenja rješenja razmatraju posebni problemi u kojima se uzimaju u obzir samo neki (osnovni) projektni uvjeti.
Ovisno o početnim podacima, razlikuju se sljedeće vrste sinteze:
Geometrijski, kada su dati pojedinačni položaji karika ili putanje pojedinačnih tačaka;
Kinematički, kada su date određene brzine, ubrzanja ili njihovi omjeri;
Dinamički, kada se zadaju djelujuće sile ili se nametnu neka ograničenja na dinamičke parametre.
Metode sinteze uključuju:
a) eksperimentalni, kada su dimenzije karika eksperimentalno odabrane za implementaciju date putanje;
b) grafički;
c) analitičke.
Moguće su različite kombinacije gore navedenih tipova i metoda sinteze.
6.2. Rješavanje problema optimalne sinteze štapnih mehanizama
Prilikom postavljanja problema optimalne sinteze treba razlikovati ulazne i izlazne parametre.
Ulazni parametri su inicijalno postavljeni parametri (veličine veze, brzine, ubrzanja ili njihovi omjeri).
Izlazni parametri su parametri određeni kao rezultat rješavanja problema.
Prilikom sinteze potrebno je uzeti u obzir niz zahtjeva kinematičke, konstruktivne, tehnološke prirode itd., među kojima je jedan, po pravilu, glavni, a ostali sporedni (dodatni). Ako je glavni zahtjev napisan matematički kao funkcija , gdje  - izlazne parametre, tada se takva funkcija poziva cilj funkcija(cilj), dok se dodatni uslovi, izraženi kao , nazivaju ograničenja.
- izlazne parametre, tada se takva funkcija poziva cilj funkcija(cilj), dok se dodatni uslovi, izraženi kao , nazivaju ograničenja.
Zadatak optimalne sinteze je da obezbedi ekstremnu vrednost Z, podložna svim ograničenjima.
Na primjer, izražavanjem težine mehanizma kao funkcije Z njegovih parametara (dužina veza), može se riješiti problem minimiziranja Z pod uvjetima njegovog postojanja. Ovi uslovi uključuju uslove za okretanje radilice u zglobnoj poluži sa četiri šipke, uslov za održavanje datog ugla pritiska i niz drugih.
Uz mali broj izlaznih parametara rješenje optimizacijskog problema može se dobiti u analitičkom obliku. Inače se koriste numeričke metode usmjerenog, slučajnog ili kombiniranog traženja optimalnih rješenja.
6.3. Uvjeti za rotaciju poluge u zglobnoj karici sa četiri karike
P  Prilikom projektovanja (sinteze) mehanizma sa četiri zgloba, jedan od uslova koji se uzima u obzir može biti okretnost karika, odnosno prisustvo jedne ili dve poluge. Zavisi od omjera dužina karika. Na primjer, da bi AB karika četverokrake (Sl. 37) postala poluga, ona mora uzastopno proći kroz dva krajnja položaja. Koristeći tri položaja mehanizma dobijamo sledeće uslove:
Prilikom projektovanja (sinteze) mehanizma sa četiri zgloba, jedan od uslova koji se uzima u obzir može biti okretnost karika, odnosno prisustvo jedne ili dve poluge. Zavisi od omjera dužina karika. Na primjer, da bi AB karika četverokrake (Sl. 37) postala poluga, ona mora uzastopno proći kroz dva krajnja položaja. Koristeći tri položaja mehanizma dobijamo sledeće uslove:
za pozicije 1, 2, 3, nakon što su prethodno naznačene dužine karika:
pri čemu:
to jest, zbir dužina poluge i bilo koje druge karike je manji od zbira preostalih karika.
Sabramo dobijene nejednakosti u paru i dobijemo:


 , odnosno radilica je najkraća karika. A ako ovi uvjeti nisu ispunjeni, tada će mehanizam biti ili s dvije poluge ili dvije klackalice. Ovi uslovi se koriste u geometrijskoj sintezi.
, odnosno radilica je najkraća karika. A ako ovi uvjeti nisu ispunjeni, tada će mehanizam biti ili s dvije poluge ili dvije klackalice. Ovi uslovi se koriste u geometrijskoj sintezi.
Federalna agencija za obrazovanje
Država obrazovne ustanove visoko stručno obrazovanje
"MATI" - ruska država Tehnološki univerzitet nazvan po K.E. Ciolkovsky
Katedra za “Mehaniku mašina i mehanizama”
PRORAČUN SILE POLUGIČNIH MEHANIZAMA
Smjernice za izradu kurseva iz teorije mehanizama i mašina
Sastavio: Chufistov V.A. Šuvalova L.S.
Moskva 2006
1. CILJEVI I SADRŽAJ PRORAČUNA SILE
Proračun snage mehanizama sastoji se u određivanju svih sila i momenata sila koje se primjenjuju na svaku kariku mehanizma. Za naknadne proračune čvrstoće, otpornosti na habanje, pouzdanosti i za rješavanje drugih problema projektovanja mehanizama moraju se znati veličina, smjer i tačke primjene sila koje djeluju na karike i kinematičke parove. Kada mehanizam radi pod dejstvom svih spoljnih sila primenjenih na njegove karike, kao i kao rezultat neravnomernog kretanja njegovih karika u kinematičke parove nastaju sile reakcije, tj. interakcijske sile između veza. Reakcione sile u proračunu sile određuju se za procjenu i osiguranje operativnosti mehanizma, posebno za odabir i proračun ležajeva.
Glavni zadatak proračuna sile je određivanje reakcije u kinematičkim parovima mehanizama, kao i određivanje sile ili para sila (balansnog momenta) i snage motora.
Proračun sile se može izvesti sa ili bez sila trenja. U većini mehanizama gubici za savladavanje trenja su mali, a njihovo zanemarivanje omogućava značajno pojednostavljenje i skraćivanje proračuna. Kinetostatski proračun se može izvesti metodom planova sila ili metodom profesora N.E. Zhukovsky.
U predmetnom projektu se izvodi kinetostatski proračun mehanizma za jednu zadatu poziciju mehanizma na oba načina. Dobijeni rezultati se upoređuju, a odstupanje ne bi trebalo da prelazi 5%.
2. PRORAČUN SILA PREMA METODU PLANOVA SILA
2.1 Opće informacije.
Kinetostatska metoda proračuna sila zasniva se na d'Alembertovom principu, prema kojem se jednadžbe statike mogu primijeniti na sistem koji se kreće ubrzano ako se dinamičkim opterećenjima dodaju statička opterećenja koja djeluju na sistem. Statička opterećenja zavise od težine karika G i , korisnih i štetnih otpora F . Dynamic
opterećenja zavise od masa G g i , momenti inercije karika I si , linearni
ubrzanja centara mase karika a si i ugaona ubrzanja karika ε i .
Dinamičko opterećenje bilo koje karike ravnog mehanizma svodi se na njegovo težište i, u općem slučaju, sastoji se od glavnog vektora i glavnog momenta inercijskih sila. Modul sile inercije karike koja vrši ravno-paralelno kretanje ili neravnomjerno rotira oko fiksne ose izračunava se po formuli:
gdje je I si moment inercije karike u odnosu na njeno težište. Moment je usmjeren u smjeru suprotnom ugaonom ubrzanju karike M H i → − ε G i .
U nedostatku sila trenja, pretpostavlja se da je reakcija u translacijskom kinematičkom paru okomita na vodilice. Ako je centar mase
klizača se poklapa sa šarkom, kojim je klizač spojen na kariku šipke, reakcija prolazi kroz šarku, a računski zadatak je pronaći veličinu reakcije. Ako se centar mase klizača ne poklapa sa šarkom, zadatak proračuna je odrediti veličinu reakcije i točku primjene. Reakcija u rotacionom kinematičkom paru se primjenjuje u centru šarke i zadatak proračuna je odrediti njenu veličinu i smjer. Ponekad je preporučljivo takvu reakciju predstaviti u obliku dvije komponente, od kojih je jedna usmjerena duž veze i naziva se normalna komponenta, a druga je okomita na nju i naziva se tangentna komponenta. Uobičajeno je označiti reakciju primijenjenu na "k" vezu sa strane "i" veze, R ik , i komponente reakcije
R n ik i R τ ik.
2.2 Početni podaci
Plan mehanizma.
Ugaona brzina rotacije ω .
Koordinata položaja radilice ϕ st.
Položaji centara mase S i veza.
Težine G i i momenti inercije karika I si .
Korisna sila otpora (sila rezanja) F .
2.3. Redoslijed izračunavanja snage.
Sljedeći redoslijed izračunavanja sile je uspostavljen bez uzimanja u obzir sila trenja u kinematičkim parovima.
2.3.1. Crtamo plan mehanizma za datu poziciju radilice
in odabranu skaluμ l .
2.3.2. Na klizač primjenjujemo težine karika G i u centrima mase S i i korisne sile otpora F. Sve sile su prikazane bez razmjera kao vektori iste dužine (15 - 20 mm).
2.3.3 Gradimo plan ubrzanja na skali od μ a m / (s2 mm). Preporučljivo je prenijeti plan mehanizma i plan ubrzanja sa prvog lista. Koristeći pravilo sličnosti, na planu ubrzanja nalazimo vektore koji predstavljaju ubrzanja centara mase karika i po formuli
a si | = πS i μa ( | ||||
izračunavamo veličine samih ubrzanja. Prema formuli (1) određujemo sile inercije karika, primjenjujemo ih u centrima mase karika, usmjeravajući ih u smjeru suprotnom od vektora a si .
Pronalazimo veličine i smjerove kutnih ubrzanja za odgovarajuće karike:
εi= | a ti | |||
prema formuli (2) - momenti inercijskih sila za iste karike i u obliku kružne strelice ih primjenjujemo na karike. U ovom slučaju, treba imati na umu da je moment inercijskih sila usmjeren u suprotnom smjeru od kutnog ubrzanja veze
(dakle za mehanizam 2 ε 4 = 0 i M 4 = 0 ). Na sl. 1a je izgrađen plan mehanizma
1 sa statičkim i dinamičkim opterećenjima primenjenim na njegove karike, na sl. 1b je njegov plan ubrzanja. Shodno tome, za mehanizam 2, plan mehanizma i plan ubrzanja prikazani su na Sl. 2a,b, za mehanizam 3 - na sl. 3a,b i za mehanizam 4 - na sl. 4a,b




2.3.4. Od mehanizma odvajamo strukturnu grupu koja se sastoji od karika 4 i 5. Za mehanizme 1,3 i 4 ovo je dijada 2 određene modifikacije (slike 5a, 7a). U mehanizmima 1 i 4, klizač 5 se kreće duž horizontalne vodilice i njegov centar mase S 5 se ne poklapa sa šarkom E. U mehanizmu 3
Klizač 5 se kreće duž vertikalne vodilice i njegovog centra mase S 5
poklapa se sa šarkom E. Dijada 4-5 će biti u ravnoteži ako se na nju primjene reakcije sa strane odbačenih karika - reakcija R 65 sa strane stalka 6 na klizač 5 i reakcija R 34 sa strane backstage 3 do klipnjače 4. Reakcija
tangencijalna komponenta R τ 34 | okomito na vezu 4. |
||||||
Veličina i smjer reakcije | R τ34 | odredimo da li pravimo jednačinu |
|||||
svih sila primijenjenih na vezu 4 u odnosu na šarku E: |
|||||||
Σ Μ (4 zvjezdice) = Ο → R τ 34 ; | |||||||
h + G h− | M 4 − R τ | DE = 0 . | |||||
R τ = U 4 h 1 + G 4 h 2 − M 4 | μ l . | ||||||
U jednačini (7) sile su zamijenjene u N, krakovi sila u mm, moment inercije Μ 4 u Nm, skala dijade -μ l u m/mm. Ako je odgovor negativan, smjer reakcije Rτ 34 mora biti obrnut.
Reakcije Rn 34 i R65 se mogu naći iz vektorska jednadžba zbir sila primenjenih na dijadu 4-5.
RG τ | +(F G +U | )+R | ||||||||
Mehanizmi poluge sa nižim kinematičkim parovima se široko koriste u savremenoj mašinstvu. Prednosti ovakvih mehanizama su: visoka proizvodnost, mogućnost upotrebe kotrljajućih ležajeva u kinematskim spojevima, mogućnost prenošenja velikih sila uz malo trošenje dodirnih površina, pouzdanost i izdržljivost u radu. Ovi mehanizmi ne zahtijevaju uređaje koji osiguravaju stalno zatvaranje kinematičkih parova, za razliku od bregastih mehanizama.
Mehanizmi se stvaraju iz uslova ispunjavanja zahtjeva tehnološkog procesa. Dizajn mehanizama je složen zadatak, čije se rješavanje može podijeliti u dvije faze. Prva faza Sinteza mehanizama se sastoji u izboru kinematičke šeme koja obezbeđuje traženi oblik i zakon kretanja izlazne veze i opšte uslove za rad mehanizama. U druga faza konstruktivni oblici karika i kinematičkih parova su razvijeni kako bi se osigurala snaga i pouzdanost mehanizma. Naš kurs pokriva samo prva faza sinteza.
Šema mehanizma se, po pravilu, bira na osnovu iskustva, u odnosu na ove specifične uslove. Onda odredi parametara sinteze, tj. dužine veza i koordinate tačaka koje obezbeđuju tražene putanje itd., kao i dodatni uslovi sinteze.
Dodatni uslovi sinteze uključuju stanje postojanja radilice, kao i stanje prenosa.
Uvjet prijenosa sile
Uobičajeno je da se kvalitet prenosa sile u mašinama karakteriše uglom pritiska λ, određen bez uzimanja u obzir sila gravitacije karika i sila inercije.
ugao pritiska λ je oštar ugao između vektora sile koja djeluje na vođenu kariku sa strane susjedne pomične karike i vektora apsolutne brzine tačke primjene ove sile.
Ugao prijenosa pokreta γ dopunjuje ugao pritiska do 90°:
γ = 90° - λ .
U fazi metričke sinteze, maksimalno dozvoljeni uglovi pritiska [λ max ] i prenosa kretanja [γ min ] su ograničeni, po pravilu, uzimajući ih:
[λ max ] ≤ 30° i [γ min ] ≥ 60° za linearno vođenu vezu, i
[λ max ] ≤ 40°...45° i [γ min ] ≥ 50°...45° za rotirajuću pogonsku kariku.
Razmotrimo uslov za prijenos sila u zglobnoj četverokraki koja je u ravnoteži pod djelovanjem momenata pokretanja M D i moment otpora M C (sl. 3.1). Ugao pritiska λ karakterizira omjer između korisne sile otpora F 23 cos λ savladavanje momenta otpora M Sa, i silom F 23 jednako
F 23 = M OD /( l sunce cos λ).
Sl.3.1. Ugao λ pritiska u zglobnoj četiri bara
Kako se kut pritiska povećava, mora se primijeniti veća sila F 23 da savlada isti moment otpora. To dovodi do povećanja reakcija u kinematičkim parovima i smanjenja efikasnosti mehanizma.
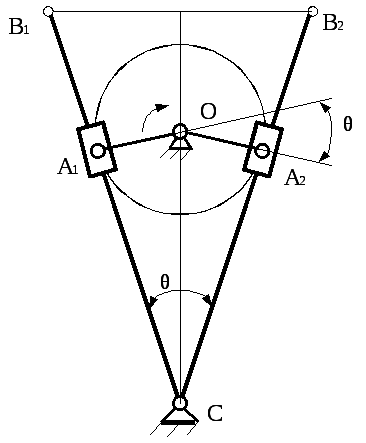
Kako se mehanizam kreće, ugao pritiska se mijenja. Ovaj ugao u zglobnoj četverokraki dostiže ekstremne vrijednosti u položajima kada se radilica OA nalazi se na istoj liniji sa stalkom OS(Sl. 3.2).

Sl.3.2. Položaji mehanizma do kojih dosežu uglovi pritiska
ekstremne vrednosti
U mehanizmu radilice-klizača, ugao pritiska poprima ekstremne vrednosti u položajima prikazanim na sl. 3.3 kada radilica OA okomito na putanju klizača AT.

Rice. 3.3. Pozicije mehanizma pod kojima se naginje pritisak
imaju ekstremne vrednosti.
U nastavku se razmatraju zadaci kinematičke sinteze mehanizama koji se najčešće susreću u predmetnim projektima.
Sinteza zglobne četverokrake po koeficijentu promjene prosječna brzina i dva ekstremna položaja klackalice
Koeficijent k promjene u prosječnoj brzini vođene veze jednake su k = V C 2 – 1 / V C 1 – 2 ,
gdje V C 1 – 2 − tačka srednja brzina linije OD(Sl. 3.4) tokom radnog hoda, V C 2 – 1 − isto za obrnuto.
Prihvati k> 1, budući da se pri projektovanju mehanizama, po pravilu, vreme povratka u početni položaj uzima manje od vremena radnog hoda, dakle k > 1.
To je lako dokazati k= (180° + θ) /(180° - θ).
Odakle θ = 180° ( k −1) /(k +1),
gdje je q − ugao između položaja klipnjače BC na početku i na kraju toka posla.
Hajde da uvedemo notaciju:
l 1 - dužina ručice AB,(vidi sliku 3.4); l 2 - dužina klipnjače sunce;
l 3 - dužina klackalice CD; l 4 - udaljenost između nosača (dužina stalka ALID).

Rice. 3.4. Šema mehanizma u pozicijama koje odgovaraju vrijednostima datih uglova ψ
S obzirom na uglove ψ 1 i ψ 2 , kao i koeficijent k, prikazuju dva ekstremna položaja klackalice CD(Sl. 3.5).
bodova OD 1 i OD 2 spojite ravnom linijom. Izračunajte ugao q između krajnjih položaja klipnjače sunce. U trenutku OD 2 konstruisati ugao γ = 90° −
θ, i iz tačke OD 1 spustite okomicu na liniju OD 1 OD 2 do raskrsnice sa linijom povučenom iz tačke OD 2 i formiraju ugao γ. Označavamo tačku preseka ovih pravih O. Očigledno, u pravouglu OOD 1 OD 2 kut OD 1 OS 2 = θ. tri boda O, OD 1 i OD 2 opisati krug. Upisani ugao sa vrhom u tački O oslanja se na luk  i jednak je uglu θ, kao i svim upisanim uglovima na osnovu istog luka. Biramo kružnicu sa centrom u tački O proizvoljna tačka ALI i povežite ga ravnim segmentima sa tačkama OD 1 i OD 2. Kao rezultat toga, postavljanjem nosača radilice na točku ALI, dobijamo dijagram četverostrukog mehanizma u ekstremnim položajima (vidi sliku 3.5).
i jednak je uglu θ, kao i svim upisanim uglovima na osnovu istog luka. Biramo kružnicu sa centrom u tački O proizvoljna tačka ALI i povežite ga ravnim segmentima sa tačkama OD 1 i OD 2. Kao rezultat toga, postavljanjem nosača radilice na točku ALI, dobijamo dijagram četverostrukog mehanizma u ekstremnim položajima (vidi sliku 3.5).

Rice. 3.5. Sinteza zglobne četverokrake po koeficijentu k
promjene prosječne brzine i dva ekstremna položaja klackalice
To proizilazi iz slike AC 1 = AT 1 OD 1 −AB 1 = l 2 − l 1 ; AC 2 = AT 2 OD 2 −AB 2 = l 2 + l 1 .
Gdje l 1 = 0,5 (AC 2 −AC 1) μ l / 2; l 2 = AC 2 − l 1 .
Dužina postolja ALID = l 4 će biti određen položajem tačke ALI.
Od pozicije tačke ALI je izabran proizvoljno, postoji multivarijantnost rješenja problema. To vam omogućava da unesete dodatne uvjete, na primjer, uvjet za prijenos sila, prisutnost ili odsutnost ekscentriciteta položaja nosača u odnosu na koordinatnu os.
Sinteza klackalice prema koeficijentk promjene
srednje brzine iza pozornice
Dato: koeficijent k promjene brzine putovanja i dva ekstremna položaja točke AT backstage sunce.
Razmotrite klackalicu u dva ekstremna položaja (slika 3.6).
Rice. 3.6. Sinteza klackalice
Ugao između položaja ručice OA 2 i nastavak ručice u položaju OA 1 je jednako θ = 180° ( k −1) /(k+1). uglovi AT 1 M B 2 i q će biti jednaki jedan drugom, kao uglovi sa međusobno okomitim stranicama.
Na pravoj liniji AT 1 AT 2 gradimo jednakokraki trokut sa uglom na vrhu OD jednak uglu q. Na pravoj liniji koja dijeli ugao q na pola u proizvoljnoj tački odaberite tačku O oko koje se radilica okreće OA. pada sa tačke O okomito na pravu AT 1 OD(ili AT 2 OD), pronađite dužinu radilice OA. Rezultirajući preklopni mehanizam će zadovoljiti date uslove. Konstrukcija klackalice prema datim uslovima je sledeća. bodova AT 1 i AT 2, čiji je položaj zadan, spojit ćemo pravom linijom.
Sinteza kliznog mehanizma radilice
Prihvatamo sljedeće konvencije (slika 3.7):

Rice. 3.7. Šema mehanizma radilice
r- dužina radilice OA;H- hod klizača; l- dužina klipnjače AB;
e– deaksijalni, tj. pomak putanje tačke AT klizač oko ose Oh ;
L = l/ r- relativnu dužinu klipnjače;
ν = e/r– relativna deaksijalna;
h = H/ r- relativni hod klizača ;
λmax je maksimalni ugao pritiska (vidi sliku 3.3);
k − koeficijent promjene prosječne brzine klizača (vidi § 3.1)
ψ 1 i ψ 2 – oštri uglovi formirana od radilice OA sa smjerom Oh u krajnjim položajima klizača: φ 1 =  AT 1
Oh, φ 2 = AT 2
Oh
;
AT 1
Oh, φ 2 = AT 2
Oh
;
θ \u003d ψ 2 - ψ 1 - oštar ugao između klipnjača u krajnjim položajima klizača.
Zadatak 1. Dato: ne, L = l/ r.
Nađi: r; l; ׀λ max ׀.
dužina radilice OA: r = H / h. Dužina klipnjače AB: l = L r.
Najveća vrijednost ugla pritiska ׀ λ max ׀ = arc sin [(1 + ν) / L] .
Zadatak 2. Dato: H,k, L= l/ r.
Nađi: r; l; e; ׀ λ max ׀.
Oštar ugao između klipnjača u krajnjim položajima klizača
θ = 180 0 ∙( k–1)/(k+1).
Relativni hod klizača nalazimo iz izraza
h = {2∙} 0,5 .
Relativni deaksijalni nalazimo iz izraza
ν = [( h –2)∙(L 2 –1)] 0,5 .
dužina radilice r = H/ h; dužina klipnjače l = L r; desaksijalni e =ν r.
Najveća vrijednost ugla pritiska λ max = arc sin [(1 + ν) / L].





