Расчет проекции силы. Основные формулы теоретической механики
Проекция силы на ось определяется отрезком оси, отсекаемым
перпендикулярами, опущенными на ось из начала и конца вектора (рис. 3.1).
Величина проекции силы на ось равна произведению модуля силы на косинус угла между вектором силы и положительным направлением оси. Таким образом, проекция имеет знак: положительный при одинаковом направлении вектора силы и оси и отрицательный при направлении в сторону отрицательной полуоси (рис. 3.2).


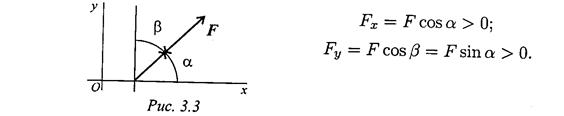
Проекция силы на две взаимно перпендикулярные оси (рис. 3.3).
Конец работы -
Эта тема принадлежит разделу:
Теоретическая механика
Теоретическая механика... ЛЕКЦИЯ... Тема Основные понятия и аксиомы статики...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ:
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Все темы данного раздела:
Задачи теоретической механики
Теоретическая механика - наука о механическом движении материальных твердых тел и их взаимодействии. Механическое движение понимается как перемещение тела в пространстве и во времени по от
Третья аксиома
Не нарушая механического состояния тела, можно добавить или убрать уравновешенную систему сил (принцип отбрасывания системы сил, эквивалентной нулю) (рис. 1.3).
Р,=Р2 Р,=Р.
Следствие из второй и третьей аксиом
Силу, действующую на твердое тело, можно перемещать вдоль линии ее действия (рис. 1.6).
Связи и реакции связей
Все законы и теоремы статики справедливы для свободного твердого тела.
Все тела делятся на свободные и связанные.
Свободные тела - тела, перемещение которых не ограничено.
Жесткий стержень
На схемах стержни изображают толсто сплошной линией (рис. 1.9).
Стержень може
Неподвижный шарнир
Точка крепления перемещаться не может. Стержень может свободно поворачиваться вокруг оси шарнира. Реакция такой опоры проходит через ось шарнира, но
Плоская система сходящихся сил
Система сил, линии действия которых пересекаются в одной точке, называется сходящейся (рис. 2.1).
Равнодействующая сходящихся сил
Равнодействующую двух пересекающихся сил можно определить с помощью параллелограмма или треугольника сил (4-я аксиома) (вис. 2.2).
Условие равновесия плоской системы сходящихся сил
При равновесии системы сил равнодействующая должна быть равна нулю, следовательно, при геометрическом построении конец последнего вектора должен совпасть с началом первого.
Если
Решение задач на равновесие геометрическим способом
Геометрическим способом удобно пользоваться, если в системе три силы. При решении задач на равновесие тело считать абсолютно твердым (отвердевшим).
Порядок решения задач:
Решение
1. Усилия, возникающие в стержнях крепления, по величине равны силам, с которыми стержни поддерживают груз (5-я аксиома статики) (рис. 2.5а).
Определяем возможные направления реакций связе
Сил аналитическим способом
Величина равнодействующей равна векторной (геометрической) сумме векторов системы сил. Определяем равнодействующую геометрическим способом. Выберем систему координат, определим проекции всех зада
Сходящихся сил в аналитической форме
Исходя из того, что равнодействующая равна нулю, получим:
Усл
Пара сил, момент пары сил
Парой сил называется система двух сил, равных по модулю, параллельных и направленных в разные стороны.
Рассмотрим систему сил (Р; Б"), образующих пару.
Момент силы относительно точки.
Сила, не проходящая через точку крепления тела, вызывает вращение тела относительно точки, поэтому действие такой силы на тело оценивается моментом.
Момент силы отн
Теорема Пуансо о параллельном переносе сил
Силу можно перенести параллельно линии ее действия, при этом нужно добавить пару сил с моментом, равным произведению модуля силы на расстояние, на которое перенесена сила.
Расположенных сил
Линии действия произвольной системы сил не пересекаются в одной точке, поэтому для оценки состояния тела такую систему следует упростить. Для этого все силы системы переносят в одну произвольно вы
Влияние точки приведения
Точка приведения выбрана произвольно. При изменении положения точки приведения величина главного вектора не изменится.
Величина главного момента при переносе точки приведения изменится,
Плоской системы сил
1. При равновесии главный вектор системы равен нулю.
Аналитическое определение главного вектора приводит к выводу:
Виды нагрузок
По способу приложения нагрузки делятся на сосредоточенные и распределенные. Если реально передача нагрузки происходит на пренебрежимо малой площадке (в точке), нагрузку называют сосредоточенной
Момент силы относительно оси
Момент силы относительно оси равен моменту проекции силы на плоскость, перпендикулярную оси, относительно точки пересечения оси с плоскостью (рис. 7.1 а).
MOO
Вектор в пространстве
В пространстве вектор силы проецируется на три взаимно перпендикулярные оси координат. Проекции вектора образуют ребра прямоугольного параллелепипеда, вектор силы совпадает с диагональю (рис. 7.2
Пространственная сходящаяся система сил
Пространственная сходящаяся система сил - система сил, не лежащих в одной плоскости, линии действия которых пересекаются в одной точке.
Равнодействующую пространственной системы си
Приведение произвольной пространственной системы сил к центру О
Дана пространственная система сил (рис. 7.5а). Приведем ее к центру О.
Силы необходимо параллельно перемещать, при этом образуется система пар сил. Момент каждой из этих пар равен
Центр тяжести однородных плоских тел
(плоских фигур)
Очень часто приходится определять центр тяжести различных плоских тел и геометрических плоских фигур сложной формы. Для плоских тел можно записать: V =
Определение координат центра тяжести плоских фигур
Примечание. Центр тяжести симметричной фигуры находится на оси симметрии.
Центр тяжести стержня находится на середине высоты. Положения центров тяжести простых геометрических фигур могут
Кинематика точки
Иметь представление о пространстве, времени, траектории, пути, скорости и ускорении.Знать способы задания движения точки (естественный и координатный).
Знать обозначения, едини
Пройденный путь
Путь измеряется вдоль траектории в направлении движения. Обозначение - S,
единицы измерения - метры.
Уравнение движения точки:
Уравнение, определяющ
Скорость движения
Векторная величина, характеризующая в данный момент быстроту и направление движения по траектории, называется скоростью.
Скорость - вектор, в любой момент направленный по к
Ускорение точки
Векторная величина, характеризующая быстроту изменения скорости по величине и направлению, называется ускорением точки.
Скорость точки при перемещении из точки М1
Равномерное движение
Равномерное движение - это движение с постоянной скоростью:
v = const.
Для прямолинейного равномерного движения (рис. 10.1 а)
Равнопеременное движение
Равнопеременное движение - это движение с постоянным касательным ускорением:
at = const.
Для прямолинейного равнопеременного движения
Поступательное движение
Поступательным называют такое движение твердого тела, при котором всякая прямая линия на теле при движении остается параллельной своему начальному положению (рис. 11.1, 11.2).
При
Вращательное движение
При вращательном движении все точки тела описывают окружности вокруг общей неподвижной оси.
Неподвижная ось, вокруг которой вращаются все точки тела, называется осью вращения.
Частные случаи вращательного движения
Равномерное вращение (угловая скорость постоянна):
ω =const
Уравнение (закон) равномерного вращения в данном случае имеет вид:
Скорости и ускорения точек вращающегося тела
Тело вращается вокруг точки О. Определим параметры движения точки A , расположенной на расстоянии RA от оси вращения (рис. 11.6, 11.7).
Путь
Решение
1. Участок 1 - неравномерное ускоренное движение, ω = φ’ ; ε = ω’
2. Участок 2 - скорость постоянна - движение равномерное,
. ω = const
3.
Основные определения
Сложным движением считают движение, которое можно разложить на несколько простых. Простыми движениями считают поступательное и вращательное.
Для рассмотрения сложного движения точ
Плоскопараллельное движение твердого тела
Плоскопараллельным, или плоским, называется такое движение твердого тела, при котором все точки тела перемещаются параллельно некоторой неподвижной в рассматриваемой системе отсчета
Поступательное и вращательное
Плоскопараллельное движение раскладывают на два движения: поступательное вместе с некоторым полюсом и вращательное относительно этого полюса.
Разложение используют для опред
Центра скоростей
Скорость любой точки тела можно определять с помощью мгновенного центра скоростей. При этом сложное движение представляют в виде цепи вращений вокруг разных центров.
Задача
Аксиомы динамики
Законы динамики обобщают результаты многочисленных опытов и наблюдений. Законы динамики, которые принято рассматривать как аксиомы, были сформулированы Ньютоном, но первый и четвертый законы были и
Понятие о трении. Виды трения
Трение - сопротивление, возникающее при движении одного шероховатого тела по поверхности другого. При скольжении тел возникает трение скольжения, при качении - трение качения. Природа сопро
Трение качения
Сопротивление при качении связано с взаимной деформацией грунта и колеса и значительно меньше трения скольжения.
Обычно считают грунт мягче колеса, тогда в основном деформируется грунт, и
Свободная и несвободная точки
Материальная точка, движение которой в пространстве не ограничено какими-нибудь связями, называется свободной. Задачи решаются с помощью основного закона динамики.
Материальные то
Сила инерции
Инертность - способность сохранять свое состояние неизменным, это внутреннее свойство всех материальных тел.
Сила инерции - сила, возникающая при разгоне или торможении тел
Решение
Активные силы: движущая сила, сила трения, сила тяжести. Реакция в опоре R. Прикладываем силу инерции в обратную от ускорения сторону. По принципу Даламбера, система сил, действующих на платформу
Работа равнодействующей силы
Под действием системы сил точка массой т перемещается из положения М1 в положение M 2 (рис. 15.7).
В случае движения под действием системы сил пользуютс
Мощность
Для характеристики работоспособности и быстроты совершения работы введено понятие мощности.
Мощность - работа, выполненная в единицу времени:
Мощность при вращении
Рис. 16.2
Тело движется по дуге радиуса из точки М1 в точку М2
М1М2 = φr
Работа силы
Коэффициент полезного действия
Каждая машина и механизм, совершая работу, тратит часть энергии на преодоление вредных сопротивлений.
Таким образом, машина (механизм) кроме полезной работы совершает еще и дополнитель
Теорема об изменении количества движения
Количеством движения материальной точки называется векторная величина, равная произведению массы точки на ее скорость mv.
Вектор количества движения совпадает по
Теорема об изменении кинетической энергии
Энергией называется способность тела совершать механическую работу.
Существуют две формы механической энергии: потенциальная энергия, или энергия положения, и кинетическая энергия,
Основы динамики системы материальных точек
Совокупность материальных точек, связанных между собой силами взаимодействия, называется механической системой.
Любое материальное тело в механике рассматривается как механическая
Основное уравнение динамики вращающегося тела
Пусть твердое тело под действием внешних сил вращается вокруг оси Оz с угловой скоростью
Напряжения
Метод сечений позволяет определить величину внутреннего силового фактора в сечении, но не дает возможности установить закон распределения внутренних сил по сечению. Для оценки прочности н
Внутренние силовые факторы, напряжения. Построение эпюр
Иметь представление о продольных силах, о нормальных напряжениях в поперечных сечениях.
Знать правила построения эпюр продольных сил и нормальных напряжений, закон распределения
Продольных сил
Рассмотрим брус, нагруженный внешними силами вдоль оси. Брус закреплен в стене (закрепление «заделка») (рис. 20.2а).
Делим брус на участки нагружения.
Участком нагружения с
Геометрические характеристики плоских сечений
Иметь представление о физическом смысле и порядке определения осевых, центробежных и полярных моментов инерции, о главных центральных осях и главных центральных моментах инерции.
Статический момент площади сечения
Рассмотрим произвольное сечение (рис. 25.1).
Если разбить сечение на бесконечно малые площадки dA и умножить каждую площадку на расстояние до оси координат и проинтегрировать получе
Центробежный момент инерции
Центробежным моментом инерции сечения называется взятая ковсей площади сумма произведений элементарных площадок на обе координаты:
Осевые моменты инерции
Осевым моментом инерции сечения относительно некоторой реи, лежащей в этой же плоскости, называется взятая по всей площади сумма произведений элементарных площадок на квадрат их расстояния
Полярный момент инерции сечения
Полярным моментом инерции сечения относительно некоторой точки (полюса) называется взятая по всей площади сумма произведений элементарных площадок на квадрат их расстояния до этой точки:
Моменты инерции простейших сечений
Осевые моменты инерции прямоугольника (рис. 25.2)
Представим прямо
Полярный момент инерции круга
Для круга вначале вычисляют полярный момент инерции, затем - осевые. Представим круг в виде совокупности бесконечно тонких колец (рис. 25.3).
Деформации при кручении
Кручение круглого бруса происходит при нагружении его парами сил с моментами в плоскостях, перпендикулярных продольной оси. При этом образующие бруса искривляются и разворачиваются на угол γ,
Гипотезы при кручении
1. Выполняется гипотеза плоских сечений: поперечное сечение бруса, плоское и перпен-
дикулярное продольной оси, после деформацииостается плоским и перпендикулярным
продольной оси.
Внутренние силовые факторы при кручении
Кручением называется нагружение, при котором в поперечном сечении бруса возникает только один внутренний силовой фактор - крутящий момент.
Внешними нагрузками также являются две про
Эпюры крутящих моментов
Крутящие моменты могут меняться вдоль оси бруса. После определения величин моментов по сечениям строим график-эпюру крутящих моментов вдоль оси бруса.
Напряжения при кручении
Проводим на поверхности бруса сетку из продольных и поперечных линий и рассмотрим рисунок, образовавшийся на поверхности после
Рис. 27.1а
деформации (рис. 27.1а). Поп
Максимальные напряжения при кручении
Из формулы для определения напряжений и эпюры распределения касательных напряжений при кручении видно, что максимальные напряжения возникают на поверхности.
Определим максимальное напряж
Виды расчетов на прочность
Существует два вида расчета на прочность
1. Проектировочный расчет - определяется диаметр бруса (вала) в опасном сечении:
Расчет на жесткость
При расчете на жесткость определяется деформация и сравнивается с допускаемой. Рассмотрим деформацию круглого бруса над действием внешней пары сил с моментом т (рис. 27.4).
Основные определения
Изгибом называется такой вид нагружения, при котором в поперечном сечении бруса возникает внутренний силовой фактор -изгибающий момент. Брус, работающий на
Внутренние силовые факторы при изгибе
Пример 1.Рассмотрим балку, на которую действует пара сил с моментом т и внешняя сила F (рис. 29.3а). Для определения внутренних силовых факторов пользуемся методом с
Изгибающих моментов
Поперечная сила в сечении считается положительной, если она стремится развернуть се
Дифференциальные зависимости при прямом поперечном изгибе
Построение эпюр поперечных сил и изгибающих моментов существенно упрощается при использовании дифференциальных зависимостей между изгибающим моментом, поперечной силой и интенсивностью равномерн
Методом сечения Полученное выражение можно обобщить
Поперечная сила в рассматриваемом сечении равна алгебраической сумме всех сил, действующих на балку до рассматриваемого сечения:
Q = ΣFi
Поскольку речь идет
Напряжения
Рассмотрим изгиб балки, защемленной справа и нагруженной сосредоточенной силой F (рис. 33.1).
Напряженное состояние в точке
Напряженное состояние в точке характеризуется нормальными и касательными напряжениями, возникающими на всех площадках (сечениях), проходящих через данную точку. Обычно достаточно определить напр
Понятие о сложном деформированном состоянии
Совокупность деформаций, возникающих по различным направлениям и в различных плоскостях, проходящих через точку, определяют деформированное состояние в этой точке.
Сложное деформи
Расчет круглого бруса на изгиб с кручением
В случае расчета круглого бруса при действии изгиба и кручения (рис. 34.3) необходимо учитывать нормальные и касательные напряжения, т. к. максимальные значения напряжений в обоих случаях возника
Понятие об устойчивом и неустойчивом равновесии
Относительно короткие и массивные стержни рассчитывают на сжатие, т.к. они выходят из строя в результате разрушения или остаточных деформаций. Длинные стержни небольшого поперечного сечения под дей
Расчет на устойчивость
Расчет на устойчивость заключается в определении допускаемой сжимающей силы и в сравнении с ней силы действующей:
Расчет по формуле Эйлера
Задачу определения критической силы математически решил
Л. Эйлер в 1744 г.
Для шарнирно закрепленного с обеих сторон стержня (рис. 36.2) формула Эйлера имеет вид
Критические напряжения.
Критическое напряжение - напряжение сжатия, соответствующее критической силе.
Напряжение от сжимающей силы определяется по формуле
Пределы применимости формулы Эйлера
Формула Эйлера выполняется только в пределах упругих деформаций.
Таким образом, критическое напряжение должно быть меньше
предела упругости материала.
Пред
Теорема Вариньона. Если рассматриваемая плоская система сил приводится к равнодействующей, то момент этой равнодействующей относительно какой-либо точки равен алгебраической сумме моментов всех сил данной системы относительно той же самой точки. Предположим, что система сил приводится к равнодействующей R, проходящей через точку О. Возьмем теперь в качестве центра приведения другую точку O 1 . Главный момент (5.5) относительно этой точки равен сумме моментов всех сил в общем виде: M O1 =ƩM o1 (F k). В нашем случае, имеем M O1 =M Ol (R), так как главный момент для центра приведения О равен нулю (M O =0). Сравнивая соотношения, получаем M O1 (R)=ƩM Ol (F k); ч.т.д.
18.Аналитический способ задания силы Выберем систему координат Oxyz. Вектор можно построить, зная модульи углымежду вектором и соответствующими осями Задание этих величин и определяет силу. Точка приложения силы должна быть задана дополнительно координатами х, у, z. Кроме того, силу можно задавать проекциями на оси. Тогда
Эти
формулы позволяют, зная проекции силы
на оси координат найти ее модуль и углы
с осями, т.е. определить силу. Зная
проекции, можно построить вектор
геометрически.
Для
плоскости формулы (2.2.1) и (2.2.2) запишутся
Построение в плоскости производится
по 4-й аксиоме статики.
19. Опорные устройства балочных систем
Применяются
следующие виды опор: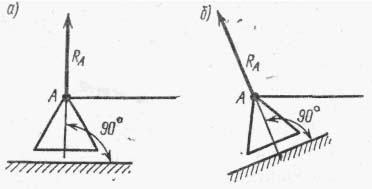
Шарнирно - подвижная опора
Здесь остается неизвестным числовое значение опорной реакции RA. Следует отметить, что опорная поверхность шарнирно-подвижной опоры может быть непараллельна оси балки (рис.б). Реакция RA в этом случае не будет перпендикулярна оси балки, так как она перпендикулярна опорной поверхности.
Шарнирно
- неподвижная опора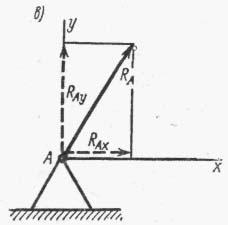
Эта опора допускает поворот вокруг оси шарнира, но не допускает никаких линейных перемещений. В данном случае известна только точка приложения опорной реакции - центр шарнира; направлениеи значение опорной реакции неизвестны. Обычно вместо определения значения и направления (полной)реакции RA находят ее составляющие RAx и RAy.
Жесткая
заделка (защемление)Такая опора не
допускает ни линейных перемещений, ни
поворота.Неизвестными в данном случае
являются не только значение и направление
реакции, но и точка ее приложения. Поэтому
жесткую заделку заменяют силой реакции
RA и парой сил с моментом MA. 
Для определения опорной реакции следует найти три неизвестных: составляющие RAx и RAy опорной реакции по осям координат и реактивный момент MA.
20.Проекция силы на ось и на плоскость
Скалярная величина, равная взятой с соответствующим знаком длине отрезка, заключенного между проекциями начала и конца силы называется проекцией силы на ось.
Знак плюс проекция имеет, если перемещение от начала к концу происходит в положительном направлении оси, и знак минус если в отрицательном.
Таким образом, проекции данной силы на любые параллельные и одинаково направленные оси равны друг другу.
Проекция
силы
на
ось Ох обозначается какTo
есть проекция силы на ось равна
произведению модуля силы на косинус
угла между направлением силы и
положительным направлением оси.
Если
сила перпендикулярна оси, то ее проекция
на эту ось равна нулю.
Проекцией
силы
на
плоскость Оху называется вектор,
заключенный между проекциями начала и
конца силы F на эту плоскость (рис. 13).
Проекция силы на плоскость есть величина векторная и характеризуется как модулем, так и направлением в плоскости Оху. Модуль проекции силы на плоскость Оху выражается какТогда проекции на оси Ох и Оу:
21. разложение сил . Разложить данную силу на несколько составляющих - значит найти такую систему нескольких сил, для которой данная сила является равнодействующей. Эта задача является неопределенной и имеет однозначное решение лишь при задании дополнительных условий. Рассмотрим два частных случая:
а) разложение силы по двум заданным направлениям. Задача сводится к построению такого параллелограмма, у которого разлагаемая сила является диагональю, а стороны параллельны заданным направлениям
б)разложение силы по трем заданным направлениям. Если заданные направления не лежат в одной плоскости, то задача"является определенной и сводится к построению такого параллелепипеда, у которого диагональ изображает заданную силу R, а ребра параллельны заданным направлениям. Способом разложения можно в простейших случаях пользоваться для определения сил давления на связи. Для этого действующую на тело (конструкцию) заданную силу надо разложить по направлениям реакции связей, так как согласно закону о действии и противодействии сила давления на связь и реакция связи направлены вдоль одной и той же прямой.
Скалярная величина, равная взятой с соответствующим знаком длине отрезка, заключенного между проекциями начала и конца силы называется проекцией силы на ось.
Знак плюс проекция имеет, если перемещение от начала к концу происходит в положительном направлении оси, и знак минус если в отрицательном.
Таким образом, проекции данной силы на любые параллельные и одинаково направленные оси равны друг другу.
Проекция силы на ось Ох обозначается как (рис. 12
![]() ).
).
Следуя рисунку 12 и определению получаем
To есть проекция силы на ось равна произведению модуля силы на косинус угла между направлением силы и положительным направлением оси.
Если сила перпендикулярна оси, то ее проекция на эту ось равна нулю.
Проекцией силы на плоскость Оху называется вектор , заключенный между проекциями начала и конца силы F на эту плоскость (рис. 13
 ).
).
Проекция силы на плоскость есть величина векторная и характеризуется как модулем, так и направлением в плоскости Оху. Модуль проекции силы на плоскость Оху выражается как
Тогда проекции на оси Ох и Оу:
Выберем систему координат Oxyz. Вектор можно построить, зная модуль и углы между вектором и соответствующими осями (рис. 14
 ).
).
Задание этих величин и определяет силу . Точка приложения силы должна быть задана дополнительно координатами х, у, z. Кроме того, силу можно задавать проекциями на оси . Тогда
Эти формулы позволяют, зная проекции силы на оси координат найти ее модуль и углы с осями, т.е. определить силу. Зная проекции, можно построить вектор геометрически.
Для плоскости формулы (2.2.1) и (2.2.2) запишутся

Построение в плоскости производится по 4-й аксиоме статики.
Рассмотрим теперь аналитический способ сложения сил. Зависимость между векторами и их проекциями дает следующая теорема:
Проекция вектора суммы на какую-нибудь ось равна алгебраической сумме проекций слагаемых векторов на ту же ось (рис. 15
 ).
).

Данные соотношения позволяют складывать силы аналитически. Можно заметить идентичность формул (2.2.1)-(2.2.4) и (2.2.9)-(2.2.11).
Решение задач в статике часто связано с операцией сложения из векторной алгебры. Вспомним старые приемы и введем некоторые определения.
Величина, равная геометрической сумме сил какой-либо системы, называется главным вектором системы.
Геометрическую сумму сил не следует смешивать с равнодействующей. Для многих систем сил равнодействующей не существует, а главный вектор можно вычислить для любой.
Рассмотрим сложение двух сил на плоскости. Геометрическая сумма сил находится по правилу параллелограмма построением силового треугольника (рис. 16
 ).
).
Модуль R равнодействующей определяем как сторону треугольника :
углы находим по теореме синусов, учитывая, что ![]() , получаем
, получаем
![]()
В продолжение геометрического способа сложения сил, напомним о сложении трех сил не лежащих в оной плоскости.
Геометрическая сумма трех сил , не лежащих в одной плоскости изображается диагональю параллелепипеда, построенного на этих силах (рис. 17
 ).
).
Здесь необходимо подчеркнуть полную аналогию рисунков 14 и 17, где в роли выступает , а в роли соответственно . Coответственно мы можем использовать формулы (2.2.1-2.2.4).
Рассматривая плоскую систему сходящихся сил необходимо рассмотреть и положение такой системы сил.
Геометрическая сумма (главный вектор) любой системы сил определяется построением силового многоугольника или последовательным сложением сил системы. Пусть дана система ![]() сходящихся сил (рис. 18
сходящихся сил (рис. 18
 ).
).
Для построения силового многоугольника выбираем произвольную точку О и переносим в нее начало , затем переносим в конец вектора начало и т.д. после переноса вектора конец вектора будет в некоторой точке N. Соединяем точки О и N вектором . Этот замыкающий вектор и будет главным вектором системы.
При последовательном сложении сил (рис. 18, а) все они переносятся вдоль линий действия в точку пересечения А. Последовательно, по правилу параллелограмма, складываются силы получается вектор :

который представляет собой равнодействующую, равную главному вектору всех сил и приложенную в точке их пересечения.
Линии действия трех непараллельных взаимно уравновешивающихся сил, лежащих в одной плоскости пересекаются в одной точке.
Пусть даны силы . Так как они лежат в одной плоскости и не параллельны то линии их действия пересекутся в некоторой точке О. Приложим силы в этой точке и заменим их равнодействующей .Тогда есть две силы и приложенные в точке О (рис. 19
 ).
).
Если тело находится в равновесии то согласно 1-й теореме статики и должны быть наплавлены вдоль одной прямой, т.е. . Следовательно, проходит через точку А. Что и требовалось доказать.
Теорема является необходимым, но недостаточным доказательством условия равновесия свободного твердого тела под действием трех сил.
Как было определено, сходящимися силами называются силы, линии действия которых пересекаются в одной точке. Учитывая теорему о трех силах и аксиому параллелограмма сил, получаем, что система сходящихся сил имеет равнодействующую, равную геометрической сумме (главному вектору) этих сил и приложенную в точке их пересечения. Построение или определение равнодействующей было осуществлено в параграфе 2 этой главы (см. формулы 2.3.3, 2.3.4).
Определив равнодействующую, мы можем перейти к определению условий равновесия свободного твердого тела под действием системы сходящихся сил.
Если на тело действует уравновешенная система сил, то тело находится в покое или совершает движение по инерции.
Для равновесия приложенной к твердому телу системы сходящихся сил необходимо и достаточно, чтобы равнодействующая этих сил была равна нулю. Условия, которым должны удовлетворять эти силы, можно выразить в геометрической или аналитической форме.
1) Геометрическое условие равновесия.
Так как равнодействующая сходящихся сил определяется как замыкающий вектор силового многоугольника, то может обратиться в нуль тогда, когда многоугольник замкнется. То есть, для равновесия системы сходящихся сил необходимо и достаточно, чтобы силовой многоугольник, построенный из этих сил, был замкнут.
2) Аналитические условия равновесия. Аналитически равнодействующая определяется как
Так как под корнем стоит сумма положительных чисел, то R будет равна нулю тогда и только тогда, когда одновременно .
То есть, одновременно будет выполняться равенства
Это условия равновесия свободного твердого тела под действием системы сходящихся сил.
Для равновесия пространственной системы сходящихся сил необходимо и достаточно, чтобы суммы проекций этих сил на координатные оси были равны нулю.
Для плоской системы сходящихся сил уравнения (2.5.3) редуцируются в следующие:
![]()
Наряду с поступательным движением твердое тело может совершать вращение вокруг центра (точки).
Вращение характеризуется моментом силы.
Пусть сила приложена в точке А. Она стремится повернуть тело вокруг неподвижного центра О (рис. 20
 ). Перпендикуляр h опущенный из точки О на линию действия силы называется плечом силы относительно центра О.
). Перпендикуляр h опущенный из точки О на линию действия силы называется плечом силы относительно центра О.
Так как точку приложения силы можно перемещать вдоль линии действия силы, то вращение тела будет зависеть от:
1) модуля силы и плеча h.
2) положения плоскости ОАВ,
Пусть вся система сил лежит в одной плоскости, тогда направление можно охарактеризовать знаком. Дадим следующее определение момента силы:
Моментом силы относительно центра О называется величина, равная взятому с соответствующим знаком произведению модуля силы на длину плеча.
Обозначается момент силы как :

Знак плюс выбираем если сила старается повернуть тело против ходя часовой стрелки, в противном случае берем знак минус.
Единицы измерения: (ньютон на метр), (килограмм на метр).
Свойства момента силы:
1) момент силы не изменится при переносе точки приложения силы вдоль ее линии действия;
2) момент силы равен нулю, тогда и только тогда, когда сила равна нулю, или ее линия действия проходит через центр О. (h = 0).
3) момент силы численно равен удвоенной площади треугольника ОАВ.
Момент равнодействующей плоской системы сходящихся сил относительно любого центра равен алгебраической сумме моментов слагаемых сил относительно того же центра.
Рассмотрим систему сил ![]() сходящихся в точке А (рис. 21
сходящихся в точке А (рис. 21
 ).
).
Для заданной схемы балки требуется найти опорные реакции, если l=14 м, а=3,8 м, b=5 м, М=11 кН м, F=10 кН.
Решение. Так как горизонтальная нагрузка отсутствует, то опора А имеет только вертикальную реакцию RA. Составляем уравнения равновесия в виде моментов всех сил относительно точек А и В.
откуда находим

Для проверки составим уравнение равновесия на вертикальную ось:
Контрольные вопросы
балка шарнир сила точка
> Как находится проекция силы на ось?
Проекция силы на ось - это алгебраическая величина, равная произведению модуля силы на косинус угла между положительным направлением оси и вектором силы (т.е. это отрезок, откладываемый силой на соответствующие оси).
Px= P cos?= P cos90o=0;
Rx= R cos? = -R cos(180o-?).

Проекция силы на ось положительна, рис. 2 а), если 0 ? ? < ?/2.
> В каком случае проекция силы на ось равна нулю?
Проекция силы на ось может быть равной нулю, рис. 2 б), если? = ?/2.)
> В каком случае проекция силы на ось равна модулю силы?
Проекция силы на ось равна модулю силы, если? =0?.
> В каком случае проекция силы на ось отрицательна?
Проекция силы на ось может быть отрицательной, рис. 2 в), если?/2 < ? ? ?.
> Сколько уравнений равновесия составляется для плоской сходящейся системы сил?
Силы называют сходящимися, если их линии действия пересекаются в одной точке. Различают плоскую систему сходящихся сил, когда линии действия всех данных сил лежат в одной плоскости.
Равновесие системы сходящихся сил.
Из законов механики следует, что твердое тело, на которое действуют взаимно уравновешенные внешние силы, может не только находиться в покое, но и совершать движение, которое мы назовем движением «по инерции». Таким движением будет, например, поступательное равномерное и прямолинейное движение тела.
Отсюда получаем два важных вывода:
1) Условиям равновесия статики удовлетворяют силы, действующие как на покоящееся тело, так и на тело, движущееся «по инерции».
2) Уравновешенность сил, приложенных к свободному твердому телу, является необходимым, но не достаточным условием равновесия (покоя) самого тела; в покое тело будет при этом находиться лишь в том случае, если оно было в покое и до момента приложения к нему уравновешенных сил.
Для равновесия приложенной к твердому телу системы сходящихся сил необходимо и достаточно, чтобы равнодействующая этих сил была равна нулю. Условия, которым при этом должны удовлетворять сами силы, можно выразить в геометрической или аналитической форме.
1. Геометрическое условие равновесия. Так как равнодействующая сходящихся сил определяется как замыкающая сторона силового многоугольника, построенного из этих сил, то может обратиться в нуль тогда и только тогда, когда конец последней силы в многоугольнике совпадает с началом первой, т. е. когда многоугольник замкнется.
Следовательно, для равновесия системы, сходящихся сил необходимо и достаточно, чтобы силовой многоугольник, построенный из этих сил, был замкнут.
2. Аналитические условия равновесия. Аналитически равнодействующая системы сходящихся сил определяется формулой
Так как под корнем стоит сумма положительных слагаемых, то R обратится в нуль только тогда, когда одновременно
т. е. когда действующие на тело силы будут удовлетворять равенствам:
Равенства выражают условия равновесия в аналитической форме: для равновесия пространственной системы сходящихся сил необходимо и достаточно, чтобы суммы проекций этих сил на каждую из трех координатных осей были равны нулю.
Если все действующие на тело сходящиеся силы лежат в одной плоскости, то они образуют плоскую систему сходящихся сил. В случае плоской системы сходящихся сил получим, очевидно, только два условия равновесия
Равенства выражают также необходимые условия (или уравнения) равновесия свободного твердого тела, находящегося под действием сходящихся сил.
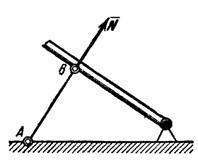
> В какую сторону направлена реакция стержня с шарнирным крепление концов?
Пусть в какой-нибудь конструкции связью является стержень АВ, закрепленный на концах шарнирами (рис.3). Примем, что весом стержня по сравнению с воспринимаемой им нагрузкой можно пренебречь. Тогда на стержень будут действовать только две силы приложенные в шарнирах А и В. Но если стержень АВ находится в равновесии, то приложенные в точках А и В силы должны быть направлены вдоль одной прямой, т. е. вдоль оси стержня. Следовательно, нагруженный на концах стержень, весом которого по сравнению с этими нагрузками можно пренебречь, работает только на растяжение или на сжатие. Если такой стержень является связью, то реакция стержня будет направлена вдоль оси стержня.
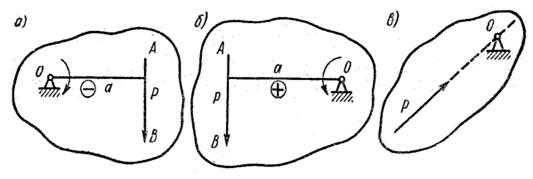
> Как находится момент силы относительно точки?
Момент силы относительно точки определяется произведением модуля силы на длину перпендикуляра, опущенного из точки на линию действия силы (рис. 4, а). При закреплении тела в точке О сила стремится вращать его вокруг этой точки. Точка О, относительно которой берется момент, называется центром момента, а длина перпендикуляра а называется плечом силы относительно центра момента.
Измеряются моменты сил в ньютонометрах (Н м) или килограммометрах (кгс м) или в соответствующих кратных и дольных единицах, как и моменты пар.





