Что такое механическая энергия с примером. Полная механическая энергия. Связь силы
Величина, которая приравнивается к половине от произведения массы данного тела на скорость этого тела в квадрате, называется в физике кинетической энергией тела или энергией действия. Изменение или непостоянство кинетической или движущей энергии тела за некоторое время будет равно работе, которая была совершена за данное время определенной силой, действующей на данное тело. Если работа какой-либо силы по замкнутой траектории любого типа будет равна нулю, то силу такого рода называют потенциальной силой. Работа таких потенциальных сил не будет зависеть от того, по какой траектории движется тело. Такая работа определяется начальным положением тела и его конечным положением. Точка начала отсчета или нуль для потенциальной энергии может быть выбрана абсолютно произвольно. Величина, которая будет равна работе, совершенной потенциальной силой для перемещения тела из данного положения в нулевую точку, называется в физике потенциальной энергией тела или энергией состояния.
Для различных видов сил в физике существуют различные формулы вычисления потенциальной или стационарной энергии тела.
Работа, совершенная потенциальными силами, будет равна изменению данной потенциальной энергии, которое должно быть взято по противоположному знаку.
Если сложить кинетическую и потенциальную энергию тела, то получится величина, которая называется полная механическая энергия тела. В положении, когда система нескольких тел является консервативной, для нее справедлив закон сохранения или постоянства механической энергии. Консервативная система тел - это такая система тел, которая подвержена действию только лишь тех потенциальных сил, что не зависят от времени.
Закон сохранения или постоянства механической энергии звучит так: «Во время любых процессов, которые происходят в некоторой системе тел, ее полная механическая энергия всегда остается неизменной». Таким образом, полная или вся механическая энергия любого тела или любой системы тел остается постоянной, если эта система тел является консервативной.
Закон сохранения или постоянства полной или всей механической энергии всегда инвариантен, то есть не меняется его форма записи, даже при изменении начальной точки отсчета времени. Это является следствием из закона однородности времени.
Когда на систему начинают действовать диссипативные силы, например, такие как то наступает постепенное уменьшение или убывание механической энергии этой замкнутой системы. Такой процесс называется диссипация энергии. Диссипативная система - это система, энергия в которой может уменьшаться с течением времени. Во время диссипации происходит полное превращение механической энергии системы в другую. Это полностью соответствует всеобщему закону энергии. Таким образом, в природе нет полностью консервативных систем. Обязательно в любой системе тел или будет иметь место та или иная диссипативная сила.
Полная механическая энергия характеризует движение и взаимодействие тел, следовательно, зависит от скоростей и взаимного расположения тел.
Полная механическая энергия замкнутой механической системы равна сумме кинетической и потенциальной энергии тел этой системы:
Закон сохранения энергии
Закон сохранения энергии - фундаментальный закон природы.
В ньютоновской механике закон сохранения энергии формулируется следующим образом:
Полная механическая энергия изолированной (замкнутой) системы тел остаётся постоянной.
Другими словами:
Энергия не возникает из ничего и не исчезает никуда, она может только переходить из одной формы в другую.
Классическими примерами этого утверждения являются: пружинный маятник и маятник на нити (с пренебрежимо малым затуханием). В случае пружинного маятника в процессе колебаний потенциальная энергия деформированной пружины (имеющая максимум в крайних положениях груза) переходит в кинетическую энергию груза (достигающую максимума в момент прохождения грузом положения равновесия) и обратно. В случае маятника на нити потенциальная энергия груза переходит в кинетическую энергию и обратно.
2 Оборудование
2.1 Динамометр.
2.2 Штатив лабораторный.
2.3 Груз массой 100 г – 2шт.
2.4 Линейка измерительная.
2.5 Кусочек мягкой ткани или войлока.
3 Теоретическое обоснование
Схема экспериментальной установки приведена на рисунке 1.
Динамометр укреплен вертикально в лапке штатива. На штатив помещают кусочек мягкой ткани или войлока. При подвешивании к динамометру грузов растяжение пружины динамометра определяется положением указателя. При этом максимальное удлинение (или статическое смещение) пружины х 0 возникает тогда, когда сила упругости пружины с жесткостью k уравновешивает силу тяжести груза массой т:
kx 0 =mg, (1)
где g = 9,81- ускорение свободного падения.
Следовательно,
Статическое смещение характеризует новое положение равновесия О" нижнего конца пружины (рис. 2).
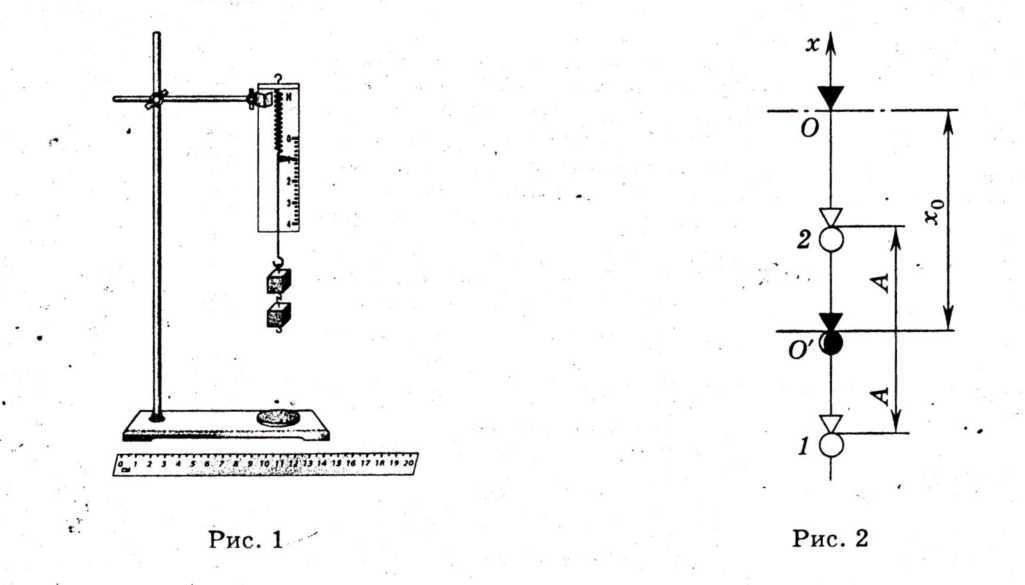
Если груз оттянуть вниз на расстояние А от точки О" и отпустить в точке 1, то возникают периодические колебания груза. В точках 1 и 2, называемых точками поворота, груз останавливается, изменяя направление движения на противоположное. Поэтому в этих точках скорость груза v = 0.
Максимальной скоростью v m ax груз будет обладать в средней точке О". На колеблющийся груз действуют две силы: постоянная сила тяжести mg и переменная сила упругости kx. Потенциальная энергия тела в гравитационном поле в произвольной точке с координатой х равна mgx. Потенциальная энергия деформированного тела соответственно равна .
При этом за нуль отсчета потенциальной энергии для обеих сил принята точка х = 0, соответствующая положению указателя для нерастянутой пружины.
Полная механическая энергия груза в произвольной точке складывается из его потенциальной и кинетической энергии. Пренебрегая силами трения, воспользуемся законом сохранения полной механической энергии.
Приравняем полную механическую энергию груза в точке 2 с координатой -(х 0 -А) и в точке О" с координатой -х 0 :
Раскрывая скобки и проводя несложные преобразования, приведем формулу (3) к виду
Тогда модуль максимальной скорости грузов
Жесткость пружины можно найти, измерив статическое смещение х 0 . Как следует из формулы (1),
Полная механическая энергия характеризует движение и взаимодействие тел, следовательно, зависит от скоростей и взаимного расположения тел.
Полная механическая энергия замкнутой механической системы равна сумме кинетической и потенциальной энергии тел этой системы:
Закон сохранения энергии
Закон сохранения энергии - фундаментальный закон природы.
В ньютоновской механике закон сохранения энергии формулируется следующим образом:
Полная механическая энергия изолированной (замкнутой) системы тел остаётся постоянной.
Другими словами:
Энергия не возникает из ничего и не исчезает никуда, она может только переходить из одной формы в другую.
Классическими примерами этого утверждения являются: пружинный маятник и маятник на нити (с пренебрежимо малым затуханием). В случае пружинного маятника в процессе колебаний потенциальная энергия деформированной пружины (имеющая максимум в крайних положениях груза) переходит в кинетическую энергию груза (достигающую максимума в момент прохождения грузом положения равновесия) и обратно. В случае маятника на нити потенциальная энергия груза переходит в кинетическую энергию и обратно.
2 Оборудование
2.1 Динамометр.
2.2 Штатив лабораторный.
2.3 Груз массой 100 г – 2шт.
2.4 Линейка измерительная.
2.5 Кусочек мягкой ткани или войлока.
3 Теоретическое обоснование
Схема экспериментальной установки приведена на рисунке 1.
Динамометр укреплен вертикально в лапке штатива. На штатив помещают кусочек мягкой ткани или войлока. При подвешивании к динамометру грузов растяжение пружины динамометра определяется положением указателя. При этом максимальное удлинение (или статическое смещение) пружины х 0 возникает тогда, когда сила упругости пружины с жесткостью k уравновешивает силу тяжести груза массой т:
kx 0 =mg, (1)
где g = 9,81- ускорение свободного падения.
Следовательно,
Статическое смещение характеризует новое положение равновесия О" нижнего конца пружины (рис. 2).
Если груз оттянуть вниз на расстояние А от точки О" и отпустить в точке 1, то возникают периодические колебания груза. В точках 1 и 2, называемых точками поворота, груз останавливается, изменяя направление движения на противоположное. Поэтому в этих точках скорость груза v = 0.
Максимальной скоростью v m ax груз будет обладать в средней точке О". На колеблющийся груз действуют две силы: постоянная сила тяжести mg и переменная сила упругости kx. Потенциальная энергия тела в гравитационном поле в произвольной точке с координатой х равна mgx. Потенциальная энергия деформированного тела соответственно равна .
При этом за нуль отсчета потенциальной энергии для обеих сил принята точка х = 0, соответствующая положению указателя для нерастянутой пружины.
Полная механическая энергия груза в произвольной точке складывается из его потенциальной и кинетической энергии. Пренебрегая силами трения, воспользуемся законом сохранения полной механической энергии.
Приравняем полную механическую энергию груза в точке 2 с координатой -(х 0 -А) и в точке О" с координатой -х 0 :
Раскрывая скобки и проводя несложные преобразования, приведем формулу (3) к виду
Тогда модуль максимальной скорости грузов
Жесткость пружины можно найти, измерив статическое смещение х 0 . Как следует из формулы (1),
Cтраница 1
Полная механическая энергия тела не изменяется. Энергия только превращается из одного вида в другой.
Полная механическая энергия тела, на которое не действуют силы трения и сопротивления, в процессе его движения остается неизменной.
Полной механической энергией тела называют сумму его кинетической и потенциальной энергий. Рассмотрим полную энергию свободно падающего тела в различные моменты времени.
Изменяется ли полная механическая энергия тела при его падении.
Что называют полной механической энергией тела.
Таким образом, полная механическая энергия тела, совершающего гармонические колебания, пропорциональна квадрату амплитуды колебаний. Поэтому амплитуда А колебаний тоже не зависит от времени.
Как видно из (44.13), полная механическая энергия тела при затухающих колебаниях уменьшается со временем по экспоненциальному закону.
Сумма кинетической и потенциальной энергий образует полную механическую энергию тела.
Абсолютно упругим называется такой удар, при котором полная механическая энергия тел сохраняется. Сначала кинетическая энергия частично или полностью переходит в потенциальную энергию упругой деформации. Затем тела возвращаются к первоначальной форме, отталкивая друг друга. В итоге потенциальная энергия упругой деформации снова переходит в кинетическую и тела разлетаются со скоростями, определяемыми двумя - условиями - сохранением суммарной энергии и суммарного импульса тел.
Абсолютно упругим называется такой удар, при котором полная механическая энергия тел сохраняется. Сначала кинетическая энергия частично или полностью переходит в потенциальную энергию упругой деформации. Затем тела возвращаются к первоначальной форме, отталкивая друг друга. В итоге Потенциальная энергия упругой деформации снова переходит в кинетическую и тела разлетаются со скоростями, определяемыми двумя условиями - сохранением суммарной энергии и суммарного импульса тел.
Абсолютно упругим называется такой удар, при котором полная механическая энергия тел сохраняется. Сначала кинетическая энергия частично или полностью переходит в потенциальную энергию упру-i гой деформации. Затем тела возвращаются к первоначальной форме, отталкивая друг друга. В итоге потенциальная энергия упругой деформации снова переходит в кинетическую и тела разлетаются со скоростями, определяемыми двумя условиями - сохранением суммарной энергии и суммарного импульса тел.
Эта работа расходуется на диссипацию энергии или изменение полной механической энергии тела.
Согласно закону изменения энергии (см. § 28) работа силы сопротивления (сторонней силы) равна приращению полной механической энергии тела.
Этот результат предсказуем, поскольку упругая сила, под действием которой движется тело, является консервативной, следовательно, выполняется за кон сохранения энергии - полная механическая энергия тела сохраняется.
Механическая энергия характеризует способность тела совершать механическую работу. Полная механическая энергия тела складывается из кинетической и потенциальной энергии.
Энергия - это запас работоспособности системы. Механическая энергия определяется скоростями движений тел в системе и их взаимным расположением; значит, это энергия перемещения и взаимодействия.
Кинетическая энергия тела - это энергия его механического движения, определяющая возможность совершить работу. При поступательном движении она измеряется половиной произведения массы тела на квадрат его скорости:
При вращательном движении кинетическая энергия тела имеет выражение:
Потенциальная энергия тела - это энергия его положения, обусловленная взаимным относительным расположением тел или частей одного и того же тела и характером их взаимодействия. Потенциальная энергия в поле сил тяжести:
![]()
где G - сила тяжести, h - разность уровней начального и конечного положения над Землей (относительно которого определяется энергия). Потенциальная энергия упругодеформированного тела:
![]()
где С - модуль упругости, дельта l - деформация.
Потенциальная энергия в поле сил тяжести зависит от расположения тела (или системы тел) относительно Земли. Потенциальная энергия упругодеформированной системы зависит от относительного расположения ее частей. Потенциальная энергия возникает за счет кинетической (подъем тела, растягивание мышцы) и при изменении положения (падение тела, укорочение мышцы) переходит в кинетическую.
Кинетическая энергия системы при плоскопараллельном движении равна сумме кинетической энергии ее ЦМ (если предположить, что в нем сосредоточена масса всей системы) и кинетической энергии системы в ее вращательном движении относительно ЦМ:
![]()
Полная механическая энергия системы равна сумме кинетической и потенциальной энергии. При отсутствии воздействия внешних сил полная механическая энергия системы не изменяется.
Изменение кинетической энергии материальной системы на некотором пути равно сумме работ внешних и внутренних сил на этом же пути:
![]()
Кинетическая энергия системы равна работе тормозящих сил, которая будет произведена при уменьшении скорости системы до нуля.
В движениях человека одни виды движения переходят в другие. При этом энергия как мера движения материи также переходит из одного вида в другой. Так, химическая энергия в мышцах превращается в механическую (внутреннюю потенциальную упругодеформированных мышц). Порожденная последней сила тяги мышц совершает работу и преобразует потенциальную энергию в кинетическую энергию движущихся звеньев тела и внешних тел. Механическая энергия внешних тел (кинетическая) передается при их действии на тело человека звеньям тела, преобразуется в потенциальную энергию растягиваемых мышц-антагонистов и в рассеивающуюся тепловую энергию (см. гл. IV).





")